自激振荡系统matlab仿真课程设计
Matlab仿真电磁振荡实验在教学中的应用-5页文档资料

Matlab仿真电磁振荡实验在教学中的应用1 引言人教版高中物理课本第二册第七章第一节《电磁振荡》,一直作为高中物理教学中的一个难点。
一是因为过程抽象,电磁振荡的产生不如机械振动直观,难以在学生头脑中构建出清晰的模型[1]。
二是因为各个物理量之间关系复杂。
并且牵涉到多种能量形式的转换。
三是在实际实验中,多种实验误差的综合影响。
电器元件的质量可能参差不齐,实验的精密度和准确度会受到影响。
虽然从理论上说实验误差可以被减小或消除,但是在实际操作中总有达不到预期效果的情况。
这正是引入Matlab进行电气仿真的优势,借助仿真得到的图像可以最大限度地避免误差,使实验结果更准确,对理解和掌握本节课的学习内容很有帮助[2]。
2 Matlab Simulink图像化建模的应用学生在刚开始学习电磁振荡的相关物理知识时,因为受先前学习的知识和内容的影响,往往会将学过的恒定电流的知识应用到解决振荡电路的问题中,结果很难解释其中的现象和原理。
为了解决这个困扰,教师在教学过程中,首先可以利用机械振动的相关知识,引导学生进行类比,构建出振动的基本概念,克服学生的思维定势,帮助学生掌握电磁振荡中各物理量的大小变化情况和变化时对于振动周期频率的影响,同时也可以让学生理解为什么在《恒定电流》这一章中学到的有关知识不能应用在电磁振荡上。
再利用 Simulink,构建相关模型,利用图像使学生能够直观地观察电磁振荡现象。
Simulink是一种寄生在Matlab环境中的,即共享工作环境的仿真工作,是 Matlab产物中的图像化建模工具。
Simulink指从目标硬件上的 Simulink直接运行模型的能力。
利用 Simulink工具,用户可以很快地搭建自己的模型和系统,并较好地分析仿真波形图,有利于下一步的教学或者深入研究。
3 仪器构造和元器件选择(如图1)把开关闭合,由电池给电容器充电。
之后再把开关断开,让电容器通过线圈放电。
可以观察到电流表的指针在0刻度线周围左右摆动,说明电路中产生了大小和方向都在做周期性变化的电流。
自激振荡系统matlab仿真课程设计
课程 计算物理和MATLAB 课程设计 题目 自激振动系统的MATLAB 仿真 专业姓名学号主要内容、基本要求、主要参考资料等 主要内容:研究范•德•波耳(Van der pol)方程()02022022=+--x dtdx x x dt x d ωμ所描述的非线性有阻尼的自激振动系统,其中μ是一个小的正的参量,0x 是常数。
下面简称范•德•波耳方程为VDP 方程。
在VDP 方程中,增加外驱动力t V ωcos 项所得到的方程()0cos 2022022=++--t V x dtdxxx dtx d ωωμ称强迫VDP 方程,其中外驱动力的振幅、角频率分别是V 和ω。
试研究强迫VDP 方程的行为。
基本要求:1.演示VDP 方程所描述的系统在非线性能源供给下,从任意初始条件出发都能产生稳定的周期性运动。
2.采用庞加莱映像,演示强迫VDP 方程在不同参数下所存在四种吸引子,即周期1吸引子、周期2吸引子、不变环面吸引子和奇怪吸引子。
3.对于强迫VDP 方程,在v 和w 为定值条件下,逐渐增大μ值,将出现周期倍分岔和混沌现象。
主要参考资料:[1] Steven E. Koonin, 秦克诚译. 计算物理学. 北京:高等教育出版社,1993. [2] 马文淦等. 计算物理学. 合肥:中国科学技术大学出版社,1992. [3] 张志涌. 精通MA TLAB6.5. 北京:北京航空航天大学出版社,2003.完成期限 指导教师专业负责人2012年 2 月 23 日第1章 概述1.1 自激震荡自激振动是一种对科学技术非常有意义而在自然界又广泛存在的非线性振动. 我们知道,对线性阻尼振动系统,严格的周期运动只能由受周期性驱动力作用的受迫振动产生;而对非线性系统,有一种自激振动系统,在非振动的能源供给下,它能产生严格的周期运动,这是人们十分感兴趣的现象。
自激系统是一个非线性的有阻尼的振动系统,在振动过程中伴随有能量损耗,但系统存在一种机制,使能量能够由非振动能源通过系统本身的反馈调节,及时适量地得到补充,从而产生一个稳定的不衰减的周期运动,这样的振动称为自激振动[1]。
matlab系统仿真课程设计
matlab系统仿真课程设计一、教学目标本课程的教学目标是使学生掌握Matlab系统仿真的基本原理和方法,能够熟练使用Matlab进行系统仿真分析。
具体目标如下:1.理解系统仿真的基本概念和原理。
2.熟悉Matlab软件的基本操作和功能。
3.掌握Matlab系统仿真的常用方法和技巧。
4.能够运用Matlab进行简单的系统仿真分析。
5.能够编写Matlab脚本程序进行系统仿真。
6.能够运用Matlab进行复杂的系统仿真分析,并能够进行结果的可视化。
情感态度价值观目标:1.培养学生的创新意识和解决问题的能力。
2.培养学生对系统仿真技术的兴趣和热情。
3.培养学生团队合作和交流的能力。
二、教学内容根据课程目标,教学内容主要包括以下几个部分:1.Matlab系统仿真基础:介绍系统仿真的基本概念和原理,Matlab软件的基本操作和功能。
2.Matlab系统仿真方法:讲解Matlab系统仿真的常用方法和技巧,包括连续系统仿真、离散系统仿真、非线性系统仿真等。
3.Matlab系统仿真实例:通过具体的实例分析,使学生能够熟练运用Matlab进行系统仿真分析,并能够进行结果的可视化。
4.复杂系统仿真:介绍复杂系统仿真的基本概念和方法,讲解复杂系统仿真的建模和分析技巧。
三、教学方法为了达到课程目标,本课程将采用多种教学方法相结合的方式进行教学:1.讲授法:通过讲解和演示,使学生掌握Matlab系统仿真的基本原理和方法。
2.案例分析法:通过分析具体的案例,使学生能够熟练运用Matlab进行系统仿真分析。
3.实验法:通过实验操作,使学生能够亲身体验和掌握Matlab系统仿真方法。
4.讨论法:通过小组讨论和交流,培养学生的团队合作和解决问题的能力。
四、教学资源为了支持教学内容和教学方法的实施,我们将准备以下教学资源:1.教材:选择一本与Matlab系统仿真相关的教材,作为学生学习的主要参考资料。
2.参考书:提供一些与Matlab系统仿真相关的参考书籍,供学生进一步深入学习。
matlab单摆振动的课程设计

matlab单摆振动的课程设计一、课程目标知识目标:1. 理解单摆振动的基本原理,掌握单摆的动力学方程及其求解方法;2. 学习运用MATLAB软件进行单摆振动模拟,理解数值解的基本概念;3. 掌握单摆周期与摆长、重力加速度之间的关系,并能够运用MATLAB进行数据分析。
技能目标:1. 能够运用MATLAB软件构建单摆振动模型,进行数值模拟和结果分析;2. 通过实际操作,培养解决物理问题的编程能力和科学计算能力;3. 能够运用MATLAB绘图功能,直观展示单摆振动过程,分析振动特性。
情感态度价值观目标:1. 培养学生对物理现象的好奇心,激发探索自然规律的兴趣;2. 培养学生严谨的科学态度,强调理论与实践相结合的重要性;3. 培养团队协作意识,让学生在合作中共同解决问题,提高沟通与表达能力。
课程性质:本课程为物理实验课程,旨在通过MATLAB软件辅助教学,帮助学生深入理解单摆振动现象。
学生特点:针对高年级学生,已具备一定的物理基础和计算机操作能力,能够较快掌握MATLAB软件的使用。
教学要求:结合课程特点和学生实际情况,注重理论与实践相结合,强调动手实践和问题解决能力的培养。
在教学过程中,将目标分解为具体的学习成果,以便进行教学设计和评估。
二、教学内容1. 理论知识:- 单摆振动的基本原理;- 单摆动力学方程及其解析解;- 单摆周期与摆长、重力加速度之间的关系。
2. MATLAB软件操作:- MATLAB基本操作与命令;- 使用MATLAB进行数值计算和绘图;- 构建单摆振动模型并进行数值模拟。
3. 教学大纲:- 第一阶段:单摆振动基本原理学习,讲解动力学方程及其解析解;- 第二阶段:MATLAB软件操作教学,学习基本命令和绘图功能;- 第三阶段:结合理论,运用MATLAB构建单摆振动模型,进行数值模拟;- 第四阶段:数据分析,探讨单摆周期与摆长、重力加速度之间的关系。
4. 教学内容安排与进度:- 理论知识:2课时;- MATLAB软件操作:2课时;- 模型构建与数值模拟:3课时;- 数据分析:1课时。
matlab课程设计自动控制原理

matlab课程设计自动控制原理一、教学目标本课程的目标是使学生掌握自动控制原理的基本概念和MATLAB在自动控制领域的应用。
通过本课程的学习,学生应能理解自动控制系统的组成、工作原理和设计方法,熟练运用MATLAB进行自动控制系统的分析和仿真。
知识目标:学生通过本课程的学习,应掌握自动控制基本理论、MATLAB基本操作和自动控制系统仿真方法。
技能目标:学生应能熟练使用MATLAB进行自动控制系统的建模、仿真和分析,具备一定的实际问题解决能力。
情感态度价值观目标:培养学生对自动控制技术的兴趣和热情,提高学生运用现代技术手段进行科学研究的能力,培养学生的创新精神和团队合作意识。
二、教学内容本课程的教学内容主要包括自动控制原理的基本概念、MATLAB的基本操作和自动控制系统的仿真方法。
1.自动控制原理:包括自动控制系统的组成、数学模型、稳定性分析、控制器设计和校正方法等。
2.MATLAB基本操作:包括MATLAB的安装和启动、变量和数据类型、矩阵运算、编程和函数的使用等。
3.自动控制系统仿真:包括MATLAB仿真环境的设置、Simulink的介绍和应用、控制系统仿真的方法和步骤等。
三、教学方法本课程采用讲授法、案例分析法和实验法相结合的教学方法。
1.讲授法:通过教师的讲解,使学生掌握自动控制原理的基本概念和MATLAB的基本操作。
2.案例分析法:通过分析实际案例,使学生理解和掌握自动控制系统的建模和仿真方法。
3.实验法:通过上机实验,使学生熟练掌握MATLAB自动控制系统仿真工具的使用,提高学生的实际操作能力。
四、教学资源本课程的教学资源包括教材、多媒体资料和实验室设备。
1.教材:选用《自动控制原理》和《MATLAB基础教程》作为主要教材,为学生提供系统的理论知识和实践指导。
2.多媒体资料:制作课件、教学视频等,以图文并茂的形式展示自动控制原理和MATLAB的操作方法。
3.实验室设备:提供计算机和MATLAB软件,供学生进行自动控制系统的仿真实验。
matlab自动控制原理课程设计
matlab自动控制原理课程设计一、教学目标本课程的教学目标是使学生掌握MATLAB在自动控制原理中的应用,培养学生利用MATLAB进行自动控制系统分析和设计的能力。
具体目标如下:1.知识目标:(1)理解自动控制系统的的基本概念、原理和特点;(2)熟悉MATLAB的基本操作和功能,掌握MATLAB在自动控制原理中的应用;(3)了解自动控制系统的常见分析和设计方法,并能运用MATLAB 进行实现。
2.技能目标:(1)能够运用MATLAB进行自动控制系统的建模、仿真和分析;(2)能够运用MATLAB进行自动控制系统的控制器设计和参数优化;(3)能够结合自动控制理论,对实际控制系统进行MATLAB仿真和调试。
3.情感态度价值观目标:(1)培养学生对自动控制理论和实践的兴趣,提高学生学习的积极性;(2)培养学生勇于探索、严谨治学的科学态度;(3)培养学生团队协作、交流分享的良好习惯。
二、教学内容根据教学目标,本课程的教学内容主要包括以下三个方面:1.MATLAB基本操作和功能介绍:MATLAB的安装和配置、基本数据类型、运算符、矩阵操作、函数编写等。
2.自动控制原理:控制系统的基本概念、数学模型、稳定性分析、控制器设计、系统校正等。
3.MATLAB在自动控制原理中的应用:控制系统建模、仿真、分析方法,控制器设计及参数优化,实际控制系统调试等。
三、教学方法本课程采用多种教学方法相结合,以提高学生的学习兴趣和主动性:1.讲授法:用于讲解自动控制原理的基本概念、理论和方法。
2.案例分析法:通过分析实际案例,使学生更好地理解自动控制原理及其在工程中的应用。
3.实验法:让学生动手实践,利用MATLAB进行控制系统建模、仿真和分析。
4.讨论法:学生进行分组讨论,促进学生间的交流与合作,培养学生的团队协作能力。
四、教学资源为了支持教学内容和教学方法的实施,丰富学生的学习体验,我们将采用以下教学资源:1.教材:《MATLAB自动控制原理与应用》。
电力电子课程设计报告matlab仿真实验
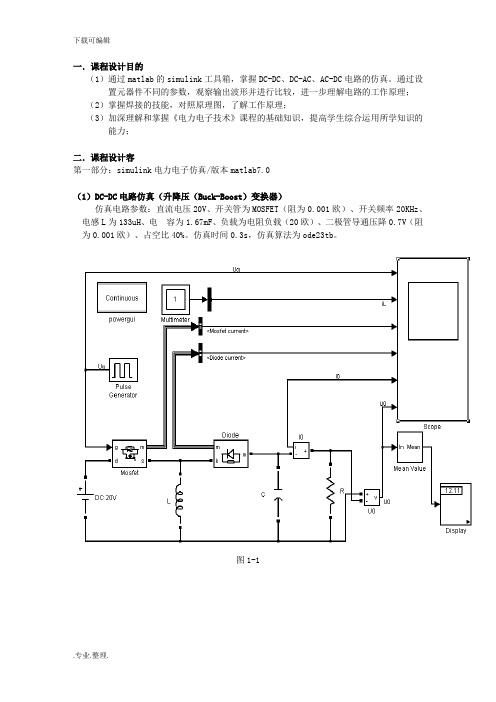
一.课程设计目的(1)通过matlab的simulink工具箱,掌握DC-DC、DC-AC、AC-DC电路的仿真。
通过设置元器件不同的参数,观察输出波形并进行比较,进一步理解电路的工作原理;(2)掌握焊接的技能,对照原理图,了解工作原理;(3)加深理解和掌握《电力电子技术》课程的基础知识,提高学生综合运用所学知识的能力;二.课程设计容第一部分:simulink电力电子仿真/版本matlab7.0(1)DC-DC电路仿真(升降压(Buck-Boost)变换器)仿真电路参数:直流电压20V、开关管为MOSFET(阻为0.001欧)、开关频率20KHz、电感L为133uH、电容为1.67mF、负载为电阻负载(20欧)、二极管导通压降0.7V(阻为0.001欧)、占空比40%。
仿真时间0.3s,仿真算法为ode23tb。
图1-1占空比为40%的,降压后为12.12V。
触发脉冲、电感电流、开关管电流、二极管电流、负载电流、输出电压的波形。
图1-2占空比为60%的,升压后为28.25V。
触发脉冲、电感电流、开关管电流、二极管电流、负载电流、输出电压的波形。
图1-3•图1-4升降压变换电路(又称Buck-boost电路)的输出电压平均值可以大于或小于输入直流电压,输出电压与输入电压极性相反,其电路原理图如图1-4(a)所示。
它主要用于要求输出与输入电压反相,其值可大于或小于输入电压的直流稳压电源工作原理:①T导通,ton期间,二极管D反偏而关断,电感L储能,滤波电容C向负载提供能量。
②T关断,toff期间,当感应电动势大小超过输出电压U0时,二极管D导通,电感L经D向C和RL反向放电,使输出电压的极性与输入电压在ton期间电感电流的增加量等于toff期间的减少量,得:由的关系,求出输出电压的平均值为:上式中,D为占空比,负号表示输出与输入电压反相;当D=0.5时,U0=Ud;当0.5<D<1时,U0>Ud,为升压变换;当0≤D<0.5时,U0<Ud,为降压变换。
matlab整流仿真课程设计

matlab整流仿真课程设计一、教学目标本课程的教学目标是使学生掌握MATLAB整流仿真基本原理和方法,能够运用MATLAB进行简单的整流电路仿真分析。
通过本课程的学习,学生应达到以下具体目标:1.理解整流电路的基本原理和特性。
2.熟悉MATLAB仿真环境及其基本操作。
3.掌握MATLAB进行整流电路仿真的方法和步骤。
4.能够独立设置整流电路参数并进行仿真。
5.能够分析仿真结果,并进行简单的电路优化设计。
6.能够撰写简单的仿真研究报告。
情感态度价值观目标:1.培养学生的动手实践能力和创新意识。
2.增强学生对电气工程及自动化专业的兴趣和认同感。
3.培养学生团队协作和沟通表达的能力。
二、教学内容本课程的教学内容主要包括整流电路基本原理、MATLAB仿真环境的熟悉以及整流电路的仿真方法。
具体的教学大纲安排如下:第1-2课时:整流电路基本原理及特性1.直流电路的基本概念。
2.整流电路的分类及工作原理。
3.整流电路的主要性能指标。
第3-4课时:MATLAB仿真环境及基本操作1.MATLAB概述及界面布局。
2.MATLAB仿真基本步骤。
3.MATLAB常用仿真工具。
第5-6课时:整流电路的MATLAB仿真1.简单整流电路的MATLAB仿真。
2.复杂整流电路的MATLAB仿真。
3.仿真结果分析及电路优化设计。
第7课时:综合案例分析及仿真报告撰写1.综合案例分析。
2.仿真报告撰写要求及技巧。
三、教学方法为了提高教学效果,我们将采用多种教学方法相结合的方式进行授课,包括:1.讲授法:用于讲解整流电路基本原理、MATLAB基本操作等内容。
2.案例分析法:通过分析具体案例,使学生更好地理解整流电路的仿真方法及应用。
3.实验法:让学生亲自动手进行整流电路的MATLAB仿真,提高其实践能力。
4.讨论法:学生进行小组讨论,培养其团队协作和沟通表达能力。
四、教学资源为了保证教学的顺利进行,我们将准备以下教学资源:1.教材:《MATLAB仿真与应用》、《电气工程及其自动化》。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课程 计算物理和MATLAB 课程设计 题目 自激振动系统的MATLAB 仿真 专业姓名学号主要内容、基本要求、主要参考资料等 主要内容:研究范•德•波耳(Van der pol)方程()02022022=+--x dtdx x x dt x d ωμ所描述的非线性有阻尼的自激振动系统,其中μ是一个小的正的参量,0x 是常数。
下面简称范•德•波耳方程为VDP 方程。
在VDP 方程中,增加外驱动力t V ωcos 项所得到的方程()0cos 2022022=++--t V x dtdxxx dtx d ωωμ称强迫VDP 方程,其中外驱动力的振幅、角频率分别是V 和ω。
试研究强迫VDP 方程的行为。
基本要求:1.演示VDP 方程所描述的系统在非线性能源供给下,从任意初始条件出发都能产生稳定的周期性运动。
2.采用庞加莱映像,演示强迫VDP 方程在不同参数下所存在四种吸引子,即周期1吸引子、周期2吸引子、不变环面吸引子和奇怪吸引子。
3.对于强迫VDP 方程,在v 和w 为定值条件下,逐渐增大μ值,将出现周期倍分岔和混沌现象。
主要参考资料:[1] Steven E. Koonin, 秦克诚译. 计算物理学. 北京:高等教育出版社,1993. [2] 马文淦等. 计算物理学. 合肥:中国科学技术大学出版社,1992. [3] 张志涌. 精通MA TLAB6.5. 北京:北京航空航天大学出版社,2003.完成期限 指导教师专业负责人2012年 2 月 23 日第1章 概述1.1 自激震荡自激振动是一种对科学技术非常有意义而在自然界又广泛存在的非线性振动. 我们知道,对线性阻尼振动系统,严格的周期运动只能由受周期性驱动力作用的受迫振动产生;而对非线性系统,有一种自激振动系统,在非振动的能源供给下,它能产生严格的周期运动,这是人们十分感兴趣的现象。
自激系统是一个非线性的有阻尼的振动系统,在振动过程中伴随有能量损耗,但系统存在一种机制,使能量能够由非振动能源通过系统本身的反馈调节,及时适量地得到补充,从而产生一个稳定的不衰减的周期运动,这样的振动称为自激振动[1]。
自激振动现象是一种普遍现象。
如钟摆、弦乐器以及人的心脏的周期性跳动。
活塞发动机的周期性运动等都是利用这种现象来建立不衰减的周期运动;但有些自激振动是十分有害的,这些现象应该设法避免。
1.2 范·德·波耳(Van der pol )方程在此课程设计中,我们主要研究范•德•波耳(V an der pol)方程:()02022022=+--x dtdxxx dtx d ωμ(1-1)所描述的非线性有阻尼的自激振动系统,其中μ是一个小的正的参量,0x 是常数。
下面简称范•德•波耳方程为VDP 方程。
在VDP 方程中,增加外驱动力t V ωcos 项所得到的方程:()0cos 2022022=++--t V x dtdxxx dtx d ωωμ(1-2)称强迫VDP 方程,其中外驱动力的振幅、角频率分别是V 和ω。
VDP 方程所描述的系统在非线性能源供给下,从任意初始条件出发都能产生稳定的周期性运动。
而对于强迫VDP 方程,在V 和为 ω定值条件下,μ逐渐增大,将出现周期倍分岔和混浊现象。
第2章 自激振荡系统的周期性运动2.1 课题解析自激系统是一个非线性有阻尼的振动系统,在运动过程中伴随有能量损耗,但系统存在一种机制,使能量能够由非振动的能源通过系统本身的反馈 调节,及时适量地得到补充,从而产生一个稳定的不衰减的周期运动,这样的振动称为自激振动。
对VDP 方程,可从机械振动角度理解,()220x x --μ是阻尼系数,它是变化的,如果0x x >, 则阻尼系数为正,系统将受阻尼,能量将逐渐减少,但如果x x <, 则发生负阻尼,意味着不仅不消耗系统的能量,反而给系统提供能量。
此系统能通过自动的反馈调节,使得在一个振动过程中,补充的能量正好等于消耗的能量,从而系统作稳定的周期振动。
2.2 MATLAB 程序设计及演示取方程(1-1)中的10=x ,10=ω, 3.0=μ,0.66,,0.85,1.08这四个初始条件进行编程,程序详见附录-程序(1)。
2.3 MATLAB演示结果和分析根据图3.1显示的结果,我们做出以下结论:给出任一初始条件,通过计算机数值求解可以证明它的相轨道都将趋向于一条闭合曲线,这一条闭合曲线,成为极限环,极限环以外的相轨道向里盘旋,而极限环以内的相轨道则向外盘旋,都趋向极限环,说明不论初始情况如何,系统最终都到达以极限环描述的周期性运动[2]。
图3.1 四种初始条件下的轨道第3章 强迫VDP 方程在不同参数下的四种吸引子下面研究强迫VDP 方程的行为,我们同时采用时间历程图、相图、庞加莱映像图来研究系统在不同参数条件下的动力学行为,可以看到存在不同的吸引子,即周期1吸引子,周期2吸引子,不变环面吸引子和奇怪吸引子。
3.1庞加莱映射为了更清楚地了解运动的形态,庞加莱对连续运动的轨迹用一个截面(叫庞加莱截面)将其横截,那么根据轨迹在截面上穿过的情况,就可以简洁地判断运动的形态,由此所得图像叫庞加莱映像。
在截面图上,轨迹下一次 穿过截面的点1+n x 可以看成前一次穿过的点n x 的一种映射。
)(1n n x f x =+(n=0,1,2,…) (3-1)这个映射就叫庞加莱映射。
它把一个连续的运动化为简洁的离散映射来研究。
在庞加莱映射中的不动点反映了相空间的周期运动,如果运动是二倍周期的,则庞加莱映射是两个不动点,四倍周期则有四个不动点等。
绘制庞加莱映射是在普通的相平面上进行,它不是像画相轨道那样随时间变化连续地画出相点,而是每隔一个外激励周期(ωπ/2=T )取一个点,例如取样的时刻可以是t=0,T,2T …相应的相点记为),(000y x P 、),(111y x P 、),(222y x P … 这些离散相点就构成了庞加莱映射[3]。
设x y =1,dtdx y =2, 则(1-2)式可化为21y dtdy =t V y y y x dtdy ωωμcos )(120221202---=(3-2)3.2 强迫VDP 方程在不同参数下的四种吸引子对于(3-2)式,t V y y y x dtdy ωωμcos )(120221202---=取120=x ,120=ω,进行以下数值计算研究:⑴在85.0=μ,1=V ,44.0=ω条件下,存在周期1吸引子,它的周期等于外激励的周期,代表主谐波运动,如图3.1所示:图 3.1 周期1吸引子⑵在02.1=μ,1=V ,44.0=ω条件下,存在周期2吸引子,它的周期等于外激励的整数倍,代表次谐波运动,如图3.2所示:图 3.2 周期2吸引子⑶在66.0=μ,1=V ,44.0=ω条件下,存在不变环面吸引子,它代表准周期(拟周期)运动,如图3.3所示图3.3 不变环面吸引子⑷08.1=μ,1=V ,44.0=ω条件下存在奇怪吸引子,它代表混浊运动。
如图3.4所示图3.4 奇怪吸引子⑸保持V和ω为定值,逐渐增大μ,将显示系统状态演化过程全貌的图。
而前四种情况中,看到的只是μ取4个值的片断情况,图形显示,当μ由0.9连续变化到1.2时,系统运动状态逐渐由周期1过渡到周期2(发生了周期倍分岔)再过渡到混浊状态。
如图3.5所示。
图3.5 演化过程全貌图3.3 MATLAB演示程序设计在程序中,这几种过程的计算是相同的,所以用for循环来完成前面四种计算,程序详见附录-程序(2)。
计算中在每个外激励周期内计算1000个相点,为了作出庞加莱映射,每隔1000个点保留一个点数据,所以程序运行的时间较长,对第五种情况,由于计算量大,将它另外编写一个程序,程序详见附录-程序(3)。
计算中在每个周期内计算100个相点,庞加莱映射是每隔100个点保留一个点数据。
第4章总结计算物理学中,应用MATLAB软件求解具体问题的例子多不胜数。
它以编程效率高、使用方便、扩充能力强、语句简单内涵丰富等特点广泛应用于数据分析、数值与符号计算、图像与数字信号处理领域。
应用MATLAB软件对自激振动系统进行仿真模拟,可以直观的显示出自激振动系统的周期性运动,以及强迫VDP方程在不同参数下所存在四种吸引子的特点,是可以观察到对于强迫VDP方程,在v和 为定值条件下,逐渐增大μ值,将出现的周期倍分岔和混沌现象。
通过应用MATLAB软件对自激振动系统进行仿真模拟,我们对自激振动系统有了更加深刻的了解。
通过演示程序的设计编程,使我们更加熟练地掌握了MATLAB软件的使用方法。
在编程过程中,细微处符号语句的使用让我们吃够了苦头,往往差之毫厘失之千里。
此外我们也了解了庞加莱映射等相关知识,对于计算物理学也有了更深刻的认识。
附录程序(1):u=[0.3,0.66,0.85 1.08];x0=1; w0=1; v=0; w=0.44;T=2*pi/w;for j=1:4[t,y]=ode23('zjzdfun',[0:T/1000:50*T],[4,4],[],u(j),x0,w0,v,w); figureplot(y(3000:end,1),y(3000:end,2));axis([-3 3 -4 4])xlabel('x');ylabel('y');end程序(2):u=[0.85, 1.02, 0.66, 1.08];x0=1; w0=1; v=1; w=0.44;T=2*pi/w;str{1}='庞加莱截面—周期1吸引子';str{2}='庞加莱截面—周期2吸引子';str{3}='庞加莱截面—不变环面吸引子';str{4}='庞加莱截面—奇怪吸引子';for j=1:4[t,y]=ode23('zjzdfun',[0:T/1000:50*T],[4,4],[],u(j),x0,w0,v,w); figuresubplot(2,1,1)plot(t,y(:,1));title('位移曲线');xlabel('x');ylabel('v');subplot(2,2,3)plot(y(3000:end,1),y(3000:end,2));axis([-3 3 -4 4])xlabel('x');ylabel('v');title('相图');subplot(2,2,4)axis([-3 1 -1 1])hold onfor i=7000:1000:14000plot(y(i,1),y(i,2),'r.');endtitle(str{j});end程序(3):u=0.8:0.001:1.2;v=1;x0=1;w0=1;w=0.44;T=2*pi/w;axis([0.9 1.2 -0.8 1])hold onfor j=1:length(u)[t,y]=ode23('zjzdfun',[0:T/100:70*T],[4,4],[],u(j),x0,w0,v,w); plot(u(j),y(500:100:1400,2),'linewidth',2);end程序(4)(该程序为调用函数):function ydot=vdbfun(t,y,flag,u,x0,w0,v,w)ydot=[y(2);u*(x0^2-y(1)^2)*y(2)-y(1)*w0^2-v*cos(w*t)];参考文献[1]丁文静.自激振动,清华大学出版社,2009,(34):325-328.[2] 胡静,彭芳麟,管靖,卢圣治.理论力学中非线性问题的MA TLAB数值解,大学物理COLL EGE PHYSICS 第20卷第10期, 2001[3]张志涌.精通MA TLAB6.5 北京:北京航空航天大学出版社,2003.。