稳性的基本概念
第四章 船舶稳性
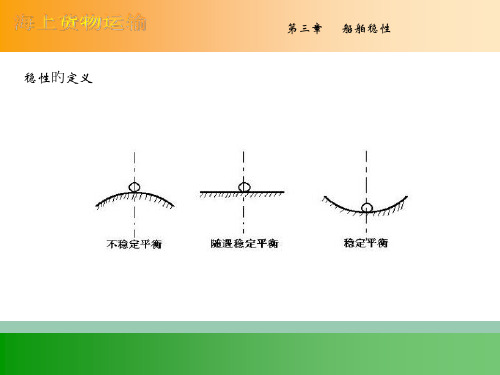
第四章船舶稳性第一节船舶稳性的基本概念(一)船舶平衡的3种状态1、稳定平衡>0G点在M点之下,GM>0,MR2、随遇平衡G点与M点重合,GM=0,M=0R3、不稳定平衡<0G点在M点之上,GM<0,MR(二)稳性的定义船舶稳性是指船舶受给定的外力作用后发生倾侧而不致倾覆,当外力消失后仍能回复到原来的平衡位置的能力。
(三)稳性分类分类方法: 按倾斜方向、倾角大小、倾斜力矩性质、船舱是否进水┏破舱稳性稳性┫┏初稳性(小倾角稳性)┃┏横稳性┫┏静稳性┗完整稳性┫┗大倾角稳性┫┗纵稳性┗动稳性其中,倾角小于等于10-15度称为小倾角,否则称为大倾角。
倾斜力矩性质指静力或动力,或者说有无角速度、角加速度。
第二节船舶初稳性(1)(一)船舶初稳性的基本标志1.稳心M 与稳心距基线高度KM船舶小倾角横倾前、后其浮力作用线交点称为横稳心,简称稳心。
稳心M距基线的垂向坐标称为稳心距基线高度。
2.初稳性的衡准指标稳心M至重心G的垂距称为初稳性高度GM。
初稳性高度GM是衡准船舶是否具有初稳性的指标。
初稳性高度大于零,即船舶重心在稳心之下,船舶就有初稳性。
3.初稳性中的假设(对于任一给定的吃水或排水量)(1)小倾角横倾(微倾);(2)在微倾过程中稳心M和重心G的位置固定不变;(3)在微倾过程中浮心B的移动轨迹是一段以稳心为圆心的圆弧;(4)在微倾过程中倾斜轴过漂心。
(二)初稳性高度GM的表达式GM=KB+BM-KG=KM-KG第二节 船舶初稳性(2)(三) 初稳性高度的求取1、 KM 可在静水力曲线图、静水力参数表或载重表中查取。
2、 KG 的计算式中,P i —— 组成船舶总重量(含空船重量等)的第i 项载荷,tZ i —— 载荷P i 的重心距基线高度,m3、Z i 确定(1)舱容曲线图表查取法船舶资料中通常有各个货舱和液舱的舱容曲线图或数据表,利用舱容曲线图表,可方便确定舱内散货或液货的重心高度Z i ,方法如下:i )对于匀质散货或液货,已知货堆表面距基线高度,在图中左纵轴上对应点做水平线交舱容中心距基线高度曲线得B 点,过B 点做垂线交上横轴得C 点,对应值即为该舱货物重心距基线高度Z i 。
稳性的定义专业知识讲座
曲线与横坐标轴旳交点即为稳性消失点,相应旳横倾角称为稳性消失角θV, 自0~ θV称为稳性范围。对于一般装载状态下旳货船而言, θV约为70 ~ 80 。
第三章 船舶稳性
第三章 船舶稳性
第五节 船舶动稳性 指船舶在动态外力矩作用下计及横倾角加速度和惯性矩旳稳性。
随遇平衡 :重心G与稳心M重叠,GM=0,MR=0 不稳定平衡:重心G在稳心M之上,GM<0,MR<0
第三章 船舶稳性
处于稳定平衡状态旳船舶,其复原能力旳大小取决于倾斜后产生旳稳性 力矩或复原力矩旳大小。
MS = 9.81Δ•GZ=9.81Δ•GMsinθ 二、船舶稳性旳分类 1.按倾斜方向分类 横稳性:系指船舶在横倾力矩旳作用下,饶纵向X轴旳横向倾斜称为横倾, 船舶在横倾时旳稳性称为横稳性。 纵稳性:指船舶在纵倾力作用下,绕横向Y轴旳纵向倾斜称为纵倾,船舶在 纵倾时旳稳性称为纵稳性。
船舶横摇周期:是指船舶横摇一种全摆程所需旳时间(s)。 船舶自正浮起横摇至一舷旳倾角称为一种摆幅,4个摆幅称为一种全摆程。
第三章 船舶稳性
三、船舶稳性调整 稳性调整旳措施可概括为:船内载荷旳垂向移动及载荷横向对称增减调 整船舶初稳性高度。 1.载荷垂移法调整GM 载荷垂向移动调整船舶稳性旳手段适应于配载计划编制阶段。 因为载荷垂移前、后船舶排水量不变,故初稳心距基线高度KM不变,所 以,载荷垂移所引起旳船舶重心高度变化量在数值上就等于初稳性高度该变 量。船舶在配载计划编制时,经校核后若稳性过大,可将载荷上移;反之将 载荷下移。
GM能够作为衡量船舶初稳性大小旳基本标志。欲使船舶具有稳性,必须 式GM>0。
船的基本三要素
船的基本三要素船是一种重要的交通工具,它可以在水上运输人员和物品。
船的设计需要考虑许多因素,其中最重要的是船的基本三要素:稳性、推进力和操纵性。
本文将详细介绍这三个方面。
一、稳性稳性是船的基本要素之一,它是指船在水中保持平衡的能力。
良好的稳性可以保证船在恶劣天气或其他不利条件下仍然能够保持平衡,从而提高安全性和可靠性。
1.1 静稳性静稳性是指船在静止状态下保持平衡的能力。
它取决于船体形状、重心位置和浮力等因素。
如果船体形状合理,重心低且浮力大,则静稳性会更好。
1.2 动稳性动稳性是指船在行驶过程中保持平衡的能力。
它取决于舵角、速度和波浪等因素。
如果舵角合适,速度适中且波浪不太大,则动稳性会更好。
二、推进力推进力是指使船运动的力量,通常由发动机或电机提供。
良好的推进力可以使船在水中快速前进,并且在恶劣天气或其他不利条件下保持稳定。
2.1 推进方式船的推进方式有很多种,例如螺旋桨、喷水推进器和气垫船等。
不同的推进方式适用于不同的船型和用途。
2.2 发动机选择发动机是提供推进力的关键部件。
在选择发动机时,需要考虑功率、燃料消耗量和可靠性等因素。
一般来说,功率越大,燃料消耗量越高,但可靠性也会更好。
三、操纵性操纵性是指控制船运动方向和速度的能力。
良好的操纵性可以使船员更容易掌控船只,并且在紧急情况下做出正确的决策。
3.1 舵角调整调整舵角是控制船运动方向的主要方法。
对于大型船只,通常需要使用电子自动导航系统来辅助调整。
3.2 舵柄操作操纵小型船只时,通常使用手柄或脚踏板来控制方向和速度。
这种方法需要良好的手眼协调能力和反应速度。
结论船的稳性、推进力和操纵性是船的基本三要素。
良好的稳性可以提高安全性和可靠性,良好的推进力可以使船在水中快速前进,并且在恶劣天气或其他不利条件下保持稳定,良好的操纵性可以使船员更容易掌控船只,并且在紧急情况下做出正确的决策。
因此,在设计和选择船只时,需要考虑这三个方面,并根据具体情况进行合理选择。
第一节稳性的基本概念

第一节 稳性的基本概念 一、稳性概述1. 概念:船舶稳性(Stability)是指船舶受外力作用发生倾斜,当外力消失后能够自行回复到原来平衡位置的能力。
2. 船舶具有稳性的原因1)造成船舶离开原来平衡位置的是倾斜力矩,它产生的原因有:风和浪的作用、船上货物的移动、旅客集中于一舷、拖船的急牵、火炮的发射以及船舶回转等,其大小取决于这些外界条件。
2)使船舶回复到原来平衡位置的是复原力矩,其大小取决于排水量、重心和浮心的相对位置等因素。
S M GZ =∆⋅ (9.81)kN m ⋅式中:GZ :复原力臂,也称稳性力臂,重力和浮力作用线之间的距离。
◎船舶是否具有稳性,取决于倾斜后重力和浮力的位置关系,而排水量一定时,船舶浮心的变化规律是固定的(静水力资料),因此重心的位置是主观因素。
3. 横稳心(Metacenter)M :船舶微倾前后浮力作用线的交点,其距基线的高度KM 可从船舶资料中查取。
4. 船舶的平衡状态1)稳定平衡:G 在M 之下,倾斜后重力和浮力形成稳性力矩。
2)不稳定平衡:G 在M 之上,倾斜后重力和浮力形成倾覆力矩。
3)随遇平衡:G 与M 重合,倾斜后重力和浮力作用在同一垂线上,不产生力矩。
如下图所示例如:1)圆锥在桌面上的不同放置方法;2)悬挂的圆盘5. 船舶具有稳性的条件:初始状态为稳定平衡,这只是稳性的第一层含义;仅仅具有稳性是不够的,还应有足够大的回复能力,使船舶不致倾覆,这是稳性的另一层含义。
6. 稳性大小和船舶航行的关系1)稳性过大,船舶摇摆剧烈,造成人员不适、航海仪器使用不便、船体结构容易受损、舱内货物容易移位以致危及船舶安全。
2)稳性过小,船舶抗倾覆能力较差,容易出现较大的倾角,回复缓慢,船舶长时间斜置于水面,航行不力。
二、稳性的分类1. 按船舶倾斜方向分为:横稳性、纵稳性2. 按倾角大小分为:初稳性、大倾角稳性3. 按作用力矩的性质分为:静稳性、动稳性4. 按船舱是否进水分为:完整稳性、破舱稳性三、初稳性1. 初稳性假定条件:1)船舶微倾前后水线面的交线过原水线面的漂心F;2)浮心移动轨迹为圆弧段,圆心为定点M(稳心),半径为BM(稳心半径)。
物体的稳定和不稳定

物体的稳定和不稳定稳定和不稳定是一对词语,在物理学中被广泛应用到描述物体的状态。
稳定指的是物体处于平衡状态下保持原状不变的性质,而不稳定则指的是物体容易发生倾覆或逆转的状态。
在我们日常生活中,物体的稳定性是一个非常重要的概念,不论是建筑物、桥梁、车辆,还是我们所使用的家具、厨具等,都需要具备一定的稳定性,才能确保我们的安全和舒适。
物体的稳定性取决于多种因素,其中最重要的是重心的位置。
重心是物体所受重力作用的一个点,通过重心的位置可以判断物体在平衡时所受到的力和力矩的大小。
当物体的重心位于物体的支撑基点上时,物体就处于稳定状态。
例如,一个放置在桌子上的杯子,由于重心位于杯子底部,所以只要桌子平稳,杯子就能保持不倾斜。
而如果重心偏离支撑基点,就会使物体变得不稳定,容易发生倾覆。
除了重心的位置,物体的形状和支撑面积也是影响稳定性的因素。
一个形状不规则的物体,由于其重心位置难以确定,往往比较容易发生倾覆。
而一个形状规则、底部支撑面积大的物体,就更容易保持稳定。
就像一个倒置的圆锥体,由于其底部支撑面积很小,所以很容易发生倾斜。
而如果将其正过来,使底部变为顶部,立刻就变得稳定了。
此外,物体的质量也会对稳定性产生影响。
质量越大的物体,其重心位置越低,稳定性就越好。
因为当物体重心位置越低时,其所受到的力矩越小,就越不容易倾覆。
例如,建筑物和大型工程机械都会在基础部位增加质量,以提高稳定性。
而对于轻薄的物体,要保持其稳定性就需要采取其他措施,比如增加支撑面积或者采用固定装置。
然而,即使物体外表稳定,也不代表它实际上就是绝对稳定的。
在实际应用中,物体还会受到其他因素的干扰,如风的作用、地震的影响等。
这些外部力的作用会改变物体所受的力和力矩,从而影响物体的稳定性。
例如,在大风天气中,高楼大厦会受到侧风的冲击,如果设计不当或者风力过大,就有可能导致楼房的倾倒。
因此,在建筑物的设计和工程的实施过程中,需要考虑到这些因素,采取相应的预防措施。
船舶原理教学大纲

船舶原理教学大纲引言:船舶原理是船舶工程的基础课程之一,它涵盖了船舶的结构、浮力、稳性、阻力、推进力以及操纵等方面的知识。
本教学大纲旨在为船舶原理课程的教学工作提供一个基本框架,帮助教师和学生理解课程的主要内容和学习目标。
一、课程目标:本课程的主要目标是使学生掌握以下知识和能力:1. 理解船舶结构和浮力的基本原理;2. 学习船舶稳性的相关理论和计算方法;3. 掌握船舶阻力的计算和降低方法;4. 了解船舶推进力的产生原理和推进装置的基本构造;5. 理解船舶操纵的基本原理和技术;6. 能够应用所学知识解决实际船舶工程问题。
二、课程内容:1. 船舶结构和浮力1.1 船舶基本结构和组成部分1.2 钢船和非钢船的结构特点1.3 船舶浮力和浮力中心的计算方法1.4 影响船舶浮力的因素及其应用2. 船舶稳性2.1 船舶稳性的基本概念和原理2.2 船舶的静态稳性和动态稳性2.3 船舶倾覆和稳性保证措施2.4 船舶稳性计算方法及实际案例分析3. 船舶阻力3.1 船舶阻力的分类和计算方法3.2 影响船舶阻力的因素及其降低方法3.3 船舶推进效率和推进装置的选择3.4 实际船舶阻力计算和优化措施4. 船舶推进力4.1 介绍船舶推进力的产生原理4.2 不同类型船舶的推进方式及特点4.3 推进螺旋桨和水动力推进器的结构和工作原理4.4 推进性能计算和分析5. 船舶操纵5.1 舵的类型和安装位置5.2 船舶操纵原理和操纵设备5.3 船舶操纵性能和操纵响应5.4 不同操纵方式和应急操纵技术6. 实践案例分析根据学生学习进度和实际情况,选择一些实际船舶案例进行分析和讨论,加强学生的动手能力和实际问题解决能力。
三、教学方法与评估:1. 教学方法:本课程将采用多种教学方法,包括课堂讲授、案例分析、实验和实地考察等。
通过理论和实践相结合的方式,提高学生的学习兴趣和应用能力。
2. 评估方式:考核方式将以课堂作业、实验报告、期末考试等形式进行综合评估。
船舶初稳性

图中一般应包括下列曲线
(1)型排水体积曲线。 (2)总排水体积曲线。 (3)总排水量曲线。 (4)浮心纵向坐标曲线。 (5)浮心垂向坐标 (或KB)曲线。 (6)漂心纵向坐标曲线。 (7)水线面面积曲线。 (8)每厘米吃水吨数TPC曲线。 (9)横稳心半径BM曲线(或横稳心垂向坐标曲线)。 (10)纵稳心半径BML曲线(或纵稳心垂向坐标曲线)。 (11)每厘米纵倾力矩MTC曲线。 (12)水线面系数Cwp曲线。 (13)中横剖面系数CM曲线。 (14)方形系数CB曲线。 (15)棱形系数CP曲线。 其中,(1)~(8)为浮性曲线,(9)~(11)为稳性曲线,(12) ~(15)为船型系
第2节 浮心的移动、稳心和稳心半径
稳性的主要问题:
– 复原力矩的计算
» 新的浮心位置的计算和确定,是求出复原力矩的 关键。
在讨论稳性问题时:
1. 首先确定倾斜水线的位置 2. 求出浮心位置和浮力作用线的位置 3. 分析复原力矩的大小及方向
一、等体积倾斜水线
如图示,设船舶平浮时的水线 为WL,在外力作用下横倾一小 角度Φ后的水线为W1L1.由于船 仅受倾斜力矩的作用,排水体 积保持不变,故倾斜水线W1L1 应是等体积倾斜水线。
设船横倾后的浮心自原来的B点移至 B浮1点心,的利移用动重距心离移为动原理,可以求得
且
由于V1=V2,故glo=g2o=g1g2/2,代入上式得:
» 上式右端V1g1o是入水楔形体积对于倾斜轴线0-0的静矩
在Φ为小角度时,tanΦ= Φ,故
积分式
为水线面WL的面积对于纵向中心轴
线0-0的横向惯性矩IT,因此
可Φ成见正,比浮,心而移与动排的水距体离积BBl与成横反向比惯. 性矩IT 、横倾角
船舶稳性知识点讲解(word)

第一节 稳性的基本概念 一、稳性概述1. 概念:船舶稳性(Stability)是指船舶受外力作用发生倾斜,当外力消失后能够自行回复到原来平衡位置的能力。
2. 船舶具有稳性的原因1)造成船舶离开原来平衡位置的是倾斜力矩,它产生的原因有:风和浪的作用、船上货物的移动、旅客集中于一舷、拖船的急牵、火炮的发射以及船舶回转等,其大小取决于这些外界条件。
2)使船舶回复到原来平衡位置的是复原力矩,其大小取决于排水量、重心和浮心的相对位置等因素。
S M GZ =∆⋅ (9.81)kN m ⋅式中:GZ :复原力臂,也称稳性力臂,重力和浮力作用线之间的距离。
◎船舶是否具有稳性,取决于倾斜后重力和浮力的位置关系,而排水量一定时,船舶浮心的变化规律是固定的(静水力资料),因此重心的位置是主观因素。
3. 横稳心(Metacenter)M :船舶微倾前后浮力作用线的交点,其距基线的高度KM 可从船舶资料中查取。
4. 船舶的平衡状态1)稳定平衡:G 在M 之下,倾斜后重力和浮力形成稳性力矩。
2)不稳定平衡:G 在M 之上,倾斜后重力和浮力形成倾覆力矩。
3)随遇平衡:G 与M 重合,倾斜后重力和浮力作用在同一垂线上,不产生力矩。
如下图所示例如:1)圆锥在桌面上的不同放置方法;2)悬挂的圆盘5. 船舶具有稳性的条件:初始状态为稳定平衡,这只是稳性的第一层含义;仅仅具有稳性是不够的,还应有足够大的回复能力,使船舶不致倾覆,这是稳性的另一层含义。
6. 稳性大小和船舶航行的关系1)稳性过大,船舶摇摆剧烈,造成人员不适、航海仪器使用不便、船体结构容易受损、舱内货物容易移位以致危及船舶安全。
2)稳性过小,船舶抗倾覆能力较差,容易出现较大的倾角,回复缓慢,船舶长时间斜置于水面,航行不力。
二、稳性的分类1. 按船舶倾斜方向分为:横稳性、纵稳性2. 按倾角大小分为:初稳性、大倾角稳性3. 按作用力矩的性质分为:静稳性、动稳性4. 按船舱是否进水分为:完整稳性、破舱稳性三、初稳性1. 初稳性假定条件:1)船舶微倾前后水线面的交线过原水线面的漂心F;2)浮心移动轨迹为圆弧段,圆心为定点M(稳心),半径为BM(稳心半径)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一节 稳性的基本概念 一、稳性概述1. 概念:船舶稳性(Stability)是指船舶受外力作用发生倾斜,当外力消失后能够自行回复到原来平衡位置的能力。
2. 船舶具有稳性的原因1)造成船舶离开原来平衡位置的是倾斜力矩,它产生的原因有:风和浪的作用、船上货物的移动、旅客集中于一舷、拖船的急牵、火炮的发射以及船舶回转等,其大小取决于这些外界条件。
2)使船舶回复到原来平衡位置的是复原力矩,其大小取决于排水量、重心和浮心的相对位置等因素。
SMG Z=∆⋅ (9.81)kN m ⋅式中:G Z:复原力臂,也称稳性力臂,重力和浮力作用线之间的距离。
◎船舶是否具有稳性,取决于倾斜后重力和浮力的位置关系,而排水量一定时,船舶浮心的变化规律是固定的(静水力资料),因此重心的位置是主观因素。
3. 横稳心(Metacenter)M :船舶微倾前后浮力作用线的交点,其距基线的高度KM 可从船舶资料中查取。
4. 船舶的平衡状态1)稳定平衡:G 在M 之下,倾斜后重力和浮力形成稳性力矩。
2)不稳定平衡:G 在M 之上,倾斜后重力和浮力形成倾覆力矩。
3)随遇平衡:G 与M 重合,倾斜后重力和浮力作用在同一垂线上,不产生力矩。
如下图所示例如:1)圆锥在桌面上的不同放置方法;2)悬挂的圆盘5. 船舶具有稳性的条件:初始状态为稳定平衡,这只是稳性的第一层含义;仅仅具有稳性是不够的,还应有足够大的回复能力,使船舶不致倾覆,这是稳性的另一层含义。
6. 稳性大小和船舶航行的关系1)稳性过大,船舶摇摆剧烈,造成人员不适、航海仪器使用不便、船体结构容易受损、舱内货物容易移位以致危及船舶安全。
2)稳性过小,船舶抗倾覆能力较差,容易出现较大的倾角,回复缓慢,船舶长时间斜置于水面,航行不力。
二、稳性的分类1. 按船舶倾斜方向分为:横稳性、纵稳性2. 按倾角大小分为:初稳性、大倾角稳性3. 按作用力矩的性质分为:静稳性、动稳性4. 按船舱是否进水分为:完整稳性、破舱稳性三、初稳性1. 初稳性假定条件:1)船舶微倾前后水线面的交线过原水线面的漂心F;2)浮心移动轨迹为圆弧段,圆心为定点M(稳心),半径为BM(稳心半径)。
2.初稳性的基本计算初稳性方程式:M R = ∆⋅GM⋅sinθGM = KM - KG第二节 初稳性计算 一、初稳性衡准指标GM 计算 1. GM = KM - KG 0 - GM f式中:KM —— 横稳心距基线高度(m),KM = f(dm); KG 0 —— 船舶重心距基线高度(m)。
2. KG 0计算0i iP Z K G ∑⋅=∆式中:P i —— 组成船舶总重的第i 项载荷重量。
Z i —— P i 载荷的重心距基线的高度(m)。
Z i 确定方法:(1)估算法 (2)利用舱容曲线(3)以舱内载荷的合体积中心或舱容中心作为舱内载荷的 合重心。
二、货物移动对稳性的影响及计算1. 货物移动→排水量(吃水)不变→KM 不变→δGM=-G 0G 12. 平行力移动原理:P*Z=Δ*G 0G 13. 货舱装满时,轻、重货等体积对调P H -P L =PP H *SF H -P L *SF L =0三、少量载荷(∑P i ≤10%∆)变动后GM 计算 若设∑P i 变动前后δKM = 0,则:()121i P i iP K G Z G M G M P ∑⋅-=+∆+∑式中:GM 1、GM 2 —— 载荷变动前、后船舶的初稳性高度(m)。
四、悬挂载荷对GM 的影响P *ZG M =d D设悬挂物重P 吨,其初始重心至悬挂点的垂 直距离l ,船舶的横倾角θ,则: 0sin sin R M GM l P θθ=∆⋅⋅-⋅⋅0sin l P G M θ⋅⎛⎫=∆⋅-⋅ ⎪∆⎝⎭即悬挂载荷对GM 影响值为:l P G M δ⋅=-∆因δGM 值等于将载荷P 垂向移至悬挂点所产生对GM 影响,所以称悬挂点为悬挂载荷的虚重心。
五、自由液面计算xfi G Mρδ∑⋅=∆式中:ρ——液体密度(g/cm 3);i x ——自由液面对其横倾轴的惯性距(m 4),常用公式有:梯形液面:()()22121248x l i b b b b =+⋅+其中:l —— 舱长(m);b 1、b 2 —— 前、后边宽(m)。
矩形液面: 312x l b i ⋅=其中: b —— 矩形边宽(m)。
第三节 大倾角稳性及计算一、大倾角稳性与初稳性的区别1. 大倾角时,不再等容倾斜,倾斜轴不再过初始漂心F ;2. 横稳性不再是定点,而随横倾角变化而变化;3. 大倾角稳性用GZ 衡量稳性大小,不能直接以GM 0作为其衡准指标。
二、大倾角稳性的表示方法 1. 基点法M R = ∆⋅GZ = ∆⋅(KN - KH)式中:KN —— 形状稳性力臂(m),KN = f(∆,θ),可从“稳性横交曲线”中查取; KH —— 重量稳性力臂(m),KH = KG ⋅sin θ,通常取:0xi K G K G ρ∑⋅=+∆GZ —— 复原力臂(m),GZ = KN - KH 。
2. 假定重心点法)(sin )(0m KG KG Z G GZ A A A θ--=式中: G A Z A —— 假定重心高度的静稳性力臂;KG A —— 假定重心高度。
3. 稳心点法)(sin 0m GMMS GZ θ+=式中: MS —— 剩余静稳性力臂,(m)。
第四节静稳性曲线一、静稳性曲线的绘制(M R = f(θ)或GZ = f(θ))二、静稳性曲线的特征值1. 曲线在原点处的斜率GM2. 横倾30︒处的复原力臂GZ|θ=30︒3. 最大复原力臂对应的横倾角θsmax(极限静倾角)曲线最高点所对应的横坐标值。
4. 稳性消失角θv在θ>θsmax且MR = 0所对应的横倾角。
5. 曲线上反曲点对应角θim通常为甲板浸水角。
6. 静稳性曲线下面积Aθ2-θ1表示复原力矩M R所作的功A R(倾斜后船舶所具有的位能)。
◎大倾角静稳性的衡准指标:GZ|θ=30︒、θsmax、θv和A R。
三、影响静稳性曲线的因素1. 对于特定船:与KG和∆有关。
2. 对不同船:与船宽B、干舷FB等因素有关。
B增大时,GM和GZ|θ=30︒增大,θsmax和θv减小。
FB增大时,GM不变,但可提高大倾角稳性。
第五节 动稳性曲线、对船舶稳性的要求 一、与静稳性的区别静倾角θs :船舶在静力作用下的最大横倾角。
动倾角θd :船舶在动力作用下的最大横倾角。
二、动稳性的衡准指标 1. 稳性衡准数K 的计算m in m in h h ww M l K M l ⋅∆==⋅∆式中:M hmin 、l hmin —— 最小倾覆力矩和力臂,即使船舶发生倾覆的最小 动倾外力矩和力臂;M w 、l w —— 风压倾侧力矩和力臂,即设定的恶劣海况下风压对船舶的动倾力矩和力臂。
2. M hmin 求法①绘制动稳性曲线l d = f(θ)利用动稳性曲线是静稳性曲线的面积曲线原理绘制。
②在l d = f(θ)曲线上作两项修正: 横摇角θi 修正 进水角θf 修正③按定义在曲线上量取l hmin (M hmin = ∆⋅l hmin )3. Mw 计算w w w w w A Z P l M ⋅⋅=⋅∆=)(∆=f式中:P w —— 单位计算风压(t/m2),P w =f(航区, Z w ); A w —— 船舶横向受风面积(m2),Aw = f(dm); Z w —— A w 中心距水线距离(m);l w —— 风压倾侧力臂(m),可从船舶资料中的风压倾侧力臂图表中查取。
三、对船舶稳性的要求1. 我国2004年《法定规则》对非遮蔽航区海船的稳性基本要求:经自由液面修正后,船舶在整个航程中必须同时满足五项基本衡准要求: (1) GM ≥ 0.15m ;(2) GZ|θ=30︒ ≥ 0.20m ,当θf <30°时由GZ|θ=θf 代替; (3)θsmax≥max{25°, θf },当船舶宽深比>2.0时,该要求可适当放宽;(4)θv ≥ 55°,99和04版《法定规则》该项要求已被取消。
(5) K ≥ 1.002. 对国际航线海船的稳性衡准要求我国99《法定规则》和IMO 规定:经自由液面修正后,船舶在整个航程中要求同时满足: (1)GM ≥ 0.15m ;(2)复原力臂曲线在横倾角0°~30°之间所围面积应不小于0.055m ·rad ; (3)复原力臂曲线在横倾角0°~40°或进水角中较小者之间所围面积应不小于0.090m ·rad ;(4)复原力臂曲线在横倾角30°~40°或进水角中较小者之间所围面积应不小于0.030m ·rad ; (5)GZ|θ=30︒ ≥ 0.20m ; (6)θsmax≥ 30°,至少不小于25°;(7)满足天气衡准要求。
第六节 稳性校验与调整 一、船舶稳性的校核船舶每一航段对稳性最不利装载情况下必须满足: 经自由液面修正:GM ≥ GM c + 0.2 (m)未经自由液面修正:GM 0 ≤ GM|T =9s (m) 二、保证适度稳性的经验方法按合适比例控制各层舱配货重量。
例如:二层舱 非底舱货约占货总重35%杂货船 (甲板货≤10%,甲板货货堆高度≤(1/5~1/6)B) 满载时 底舱货约占货总重65% 三、船舶稳性的检验方法1. 航行中检验 —— 实测横摇周期T θT θ:船舶横摇一个全摆程(四个摆幅)所需时间(s)。
(1)《法定规则》推荐公式0.58T f θ=⋅式中:B —— 船舶型宽(m);GM 0 —— 未经自由液面修正的初稳性高度(m); f ——系数,由B/d m 查表。
(2)经验公式2f B G M T θ⎛⎫⋅= ⎪⎝⎭式中:f —— 横摇周期系数,一般货船f = 0.73~0.88。
2. 停泊中检验 —— 横向移动或加减载荷设横向移动P(t),船舶产生横倾角θ,则:P ⋅Y = ∆⋅GM ⋅tg θ或: P Y G M tg θ∑⋅=∆⋅式中:Y —— P 重心横移的距离,右移取“+”左移取“-”。
3. 观察船舶征状M R ↓ = ∆⋅GM ↓⋅sin θ GM 0↓= f(T θ↑)当受到较小外力矩作用时,船舶会发生明显的横倾,且其横摇极其缓慢。
四、稳性调整 1. GM 的调整设GM 的调整值:N h = 要求的GM 2 - 调整前GM 1。
(1)垂向移动载荷h N P Z⋅∆=式中:Z —— P 重心垂向移动距离(m),下移取“+”,上移取“-”。
当满载满舱时,可采用轻 重货物等体积互换方法调整,此时还应满足:P = P H- P L SF H ⋅P H = SF L ⋅P L (2)加减载荷(∑P ≤ 10%∆)N h ⋅(∆ + P) = P ⋅(KG 0 - Zp)0h p hN P K G Z N ⋅∆=--注意:P 加载时取“+”,减载时取“-”。