高压输电线路巡检机器人系统设计
高压输电线路巡线机器人结构设计
编号南京航空航天大学毕业设计题目高压输电线路巡线机器人结构设计二〇一四年六月学生姓名曹嘉彬学号*********学院机电学院专业机械工程及自动化班级0510101指导教师王扬威讲师南京航空航天大学本科毕业设计(论文)诚信承诺书本人郑重声明:所呈交的毕业设计(论文)(题目:高压输电线路巡线机器人结构设计)是在导师的指导下本人独立完成的。
尽本人所知,除了毕业设计(论文)中特别加以标注引用的内容外,本毕业设计(论文)不包含任何其他个人或集体已经发表或撰写的成果作品。
作者签名:年月日(学号):高压输电线路巡线机器人结构设计摘要目前在国内,高压输电线路的巡检、维护主要有两种方法:一种方法是人为地检查,其缺陷有人工劳动强度大、工作效率低、可靠性差、存在检查的盲区;另一种方法是用直升机检查,虽然这种方法有较高检测效率和精度,但是这种方法受一些环境因素的制约,同时不仅增加了巡检的技术难度,还将大大增加巡检的费用。
所以急需一种可以替代之的工作方式。
移动机器人技术的发展为高压输电线的检查工作提供了新的手段。
本文首先介绍了高压输电线路巡线机器人的研究背景及意义,综述了国内外巡线机器人的研究发展现状。
然后针对高压输电线路设计出一种全新的巡线机器人运动结构,该机构采用三臂式多自由度机械手臂,可以实现安全可靠的自主巡线,并且利用solidworks建立了巡线机器人的三维模型。
此结构的优点在于抓线能力强,运动稳定。
关键词巡线机器人,结构设计,运动学分析,动力学分析Structural design of high voltage transmission lineinspection robotAbstractAt present, there are mainly two methods in inspecting the transmission line: One method is artificially inspection which suffers from great labor intensity, low working efficiency and reliability and blind area of inspecting;the other method is the helicopter inspection, although this method enhanced inspecting efficiency and precision,it is rigour to the climate, moreover, it not only increases the technical difficulty for the viewer and the shooting device but also cost much more. So you can replace the need for a way of working. The development of mobile robot technology provided new means for inspection of the high-voltage transmission line.This paper introduces there search backgroundand significance of high-voltage transmission line inspection robot,summarizes the status of research and development at home and abroad inspection robot.Then for the high-voltage transmission lines to design a new structure inspection robot motio. The agency uses three arm multi-degree of freedom robotic arm can achieve safe and reliable autonomous transmission line and use solidworks established inspection robot of three-dimensional model .the advantage of this structure is that the strong grasp of line and stability of movement.Key words:inspection robot;structural design;kinematic anaylsis;kinetic analysis目录摘要 (i)Abstract (ii)目录 (iii)第一章绪论............................................................. - 1 -1.1巡线机器人研究目的及意义........................................... - 1 -1.2巡线机器人国内外研究现状........................................... - 2 -1.3本课题研究内容..................................................... - 5 - 第二章巡线机器人总体设计及理论分析...................................... - 7 -2.1巡线机器人工作环境分析............................................. - 7 -2.2巡线机器人的主要技术指标.......................................... - 10 -2.3巡线机器人运动学分析.............................................. - 10 -2.4机器人的工作空间分析.............................................. - 17 - 第三章巡线机器人详细结构设计............................................ - 19 -3.1巡线机器人机械手指结构设计........................................ - 19 -3.2巡线机器人跨线手臂与承重手臂结构设计.............................. - 21 -3.3巡线机器人连接手臂结构设计........................................ - 23 -3.4巡线机器人箱体结构设计............................................ - 24 -3.5轴校核............................................................ - 26 - 第四章巡线机器人越障能力分析............................................ - 28 -4.1巡线机器人越障步骤................................................ - 28 -4.2.机械臂运动学方程的正解............................................ - 29 - 第五章总结与展望........................................................ - 31 -5.1总结.............................................................. - 31 -5.2展望.............................................................. - 31 - 参考文献................................................................. - 32 - 致谢..................................................................... - 34 -第一章绪论1.1巡线机器人研究目的及意义电力系统,由发电、变电、输电、配电和用电等环节组成的电能生产与消费系统。
高压输电线路爬山机器人系统设计与控制

高压输电线路爬山机器人系统设计与控制1. 引言高压输电线路的维护十分重要,然而,由于线路通常布置在复杂多变的地形环境中,传统的人工巡检效率低下,并且存在一定的安全风险。
因此,设计一种高效、安全且可靠的爬山机器人系统用于输电线路维护势在必行。
2. 系统设计2.1 机器人结构设计针对输电线路的特殊环境,机器人应具备良好的适应性和稳定性。
设计中应选择轻量化材料以减轻机器人自身重量,同时具备足够的强度和防腐蚀能力。
2.2 动力系统设计机器人的动力系统应满足长时间连续工作的需求。
采用电池供电,且具备快速充电功能,以提高工作时间和效率。
2.3 越障能力设计机器人需要能够在复杂地形中爬行并越过障碍物。
采用多足或履带设计,具备灵活性和稳定性。
同时,应配备传感器以侦测障碍物和地形变化,以确保行进路径的安全可靠。
2.4 高清摄像系统设计机器人配备高清摄像系统,可对输电线路及其周边环境进行实时监测和录像。
通过视频传输技术,将数据传输至远程控制中心,以提供操作者准确的信息。
3. 系统控制3.1 远程控制中心为了确保操作者对机器人的远程操控准确和及时,设立远程控制中心。
远程控制中心应具备实时视频接收和传输的功能,以及对机器人的操作控制系统。
3.2 控制算法设计先进的控制算法,确保机器人在复杂环境下的稳定行进。
算法包括路径规划、姿态控制、障碍物避让和定位等模块。
3.3 自主导航技术机器人应具备一定的自主导航能力,可以根据预设的任务和指令进行自主巡检。
采用红外线、激光雷达和超声波等传感器进行环境感知和导航。
4. 系统优势与应用前景4.1 系统优势高压输电线路爬山机器人系统设计与控制具有以下优势:- 提高工作效率:机器人可以连续工作,无需休息,大大节约时间和人力成本。
- 提高安全性:减少人工巡检的危险性,避免意外事故的发生。
- 减少线路故障:机器人通过实时监测,可以及时发现并处理线路故障,避免大范围停电。
4.2 应用前景高压输电线路爬山机器人系统可应用于输电线路的巡检、维护和故障处理。
高压输电线路自主巡检机器人

研究故障诊断算法,根据图像识别结果和其他传 感器数据,对高压输电线路的故障进行自动诊断 和定位。
数据传输与远程监控实现
数据传输
研究高压输电线路自主巡检机器人与远程监控中心之间的数据传输技术,包括无线通信技术、 网络协议等,确保数据的实时性和准确性。
远程监控
开发远程监控软件,实现对高压输电线路自主巡检机器人的远程监控和控制,包括实时查看巡 检状态、巡检数据、控制机器人等。
高精度传感器
选用高精度传感器,提高 机器人对输电线路的识别 和定位精度。
大容量电池
选用大容量电池,确保机 器人在长时间巡检过程中 有足够的续航能力。
硬件集成与测试
集成方式
采用可靠的集成方式,确保各个硬件部件之间的协同工 作。
测试方法
制定详细的测试方案,对机器人的各项性能指标进行严 格测试,确保机器人满足设计要求。
实际应用案例展示
案例一
机器人在恶劣环境下的巡检表现 ,如极端天气、复杂地形等,展
示其适应性和稳定性。
案例二
机器人发现线路缺陷或故障的案 例,如设备缺陷、线路老化等,
突显其检测效率和准确性。
案例三
机器人协同人工巡检的案例,展 示机器人在提高巡检效率和质量
方面的作用。
经济效益与社会效益分析
投资成本
分析机器人研发、生产、维护等方面的投资成本 ,以及与传统巡检方式的成本对比。
03
机器人软件系统设计
巡检任务规划与管理
01
任务规划
根据高压输电线路的实际情况,制定巡检任务, 包括巡检路径、巡检点、巡检时间等。
02
任务管理
对巡检任务进行统一管理,包括任务的创建、编 辑、删除、查询等。
具有自主导航能力的高压输电线路无人机巡检系统设计
具有自主导航能力的高压输电线路无人机巡检系统设计随着科技的不断进步,无人机技术在各个领域都得到了广泛应用。
在输电线路巡检方面,传统的方法往往需要耗费大量的人力物力,并且存在一定的安全隐患。
而具有自主导航能力的高压输电线路无人机巡检系统的设计与应用,可以实现对输电线路的精准巡检,大大提高了巡检效率和安全性。
本文将对该系统的设计要点和应用优势进行详细介绍。
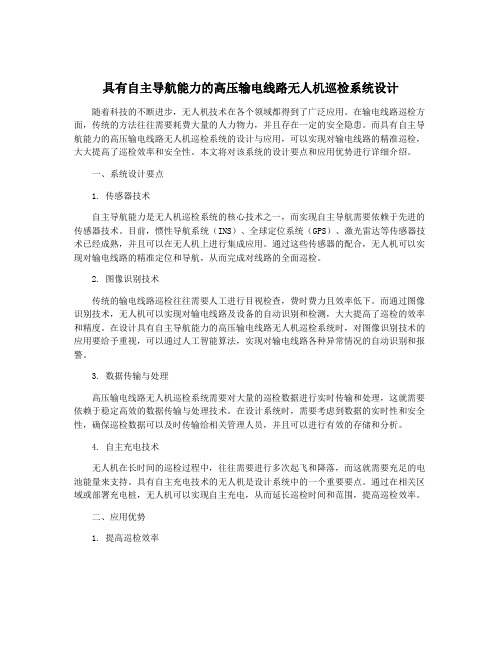
一、系统设计要点1. 传感器技术自主导航能力是无人机巡检系统的核心技术之一,而实现自主导航需要依赖于先进的传感器技术。
目前,惯性导航系统(INS)、全球定位系统(GPS)、激光雷达等传感器技术已经成熟,并且可以在无人机上进行集成应用。
通过这些传感器的配合,无人机可以实现对输电线路的精准定位和导航,从而完成对线路的全面巡检。
2. 图像识别技术传统的输电线路巡检往往需要人工进行目视检查,费时费力且效率低下。
而通过图像识别技术,无人机可以实现对输电线路及设备的自动识别和检测,大大提高了巡检的效率和精度。
在设计具有自主导航能力的高压输电线路无人机巡检系统时,对图像识别技术的应用要给予重视,可以通过人工智能算法,实现对输电线路各种异常情况的自动识别和报警。
3. 数据传输与处理高压输电线路无人机巡检系统需要对大量的巡检数据进行实时传输和处理,这就需要依赖于稳定高效的数据传输与处理技术。
在设计系统时,需要考虑到数据的实时性和安全性,确保巡检数据可以及时传输给相关管理人员,并且可以进行有效的存储和分析。
4. 自主充电技术无人机在长时间的巡检过程中,往往需要进行多次起飞和降落,而这就需要充足的电池能量来支持。
具有自主充电技术的无人机是设计系统中的一个重要要点。
通过在相关区域或部署充电桩,无人机可以实现自主充电,从而延长巡检时间和范围,提高巡检效率。
二、应用优势1. 提高巡检效率相比于传统的人工巡检方式,具有自主导航能力的高压输电线路无人机巡检系统可以实现对大范围输电线路的快速巡检。
高压输电线路巡线机器人结构设计

高压输电线路巡线机器人结构设计一、引言高压输电线路是电力系统中的重要组成部分,保证了电能的高效传输。
然而,高压输电线路巡检是一项危险而繁重的工作,传统的人工巡线方式存在一定的隐患和不足。
为了提高巡线效率和保障工作人员的安全,设计一种高压输电线路巡线机器人成为了必要。
二、机器人结构设计要求1. 安全可靠:机器人在高压输电线路的复杂环境中能稳定运行,避免人工巡线带来的安全风险。
2. 自主性:机器人能够根据预设的路线自主巡线,减轻操作人员的负担。
3. 精准性:机器人具备精确的定位能力,能够准确检测高压输电线路的各项参数。
4. 灵活性:机器人具备良好的机动性,能够适应不同形式的高压输电线路巡检任务。
三、机器人结构设计方案1. 底盘设计底盘是机器人的核心部件,需要具备重载、稳定和越障能力。
采用四轮驱动和悬挂系统设计,可增强机器人的通过性和稳定性。
同时,在底盘上配置导航系统和传感器设备,实现自主巡线和环境感知功能。
2. 机械臂设计机械臂是机器人进行巡线和检修的关键部件。
机械臂的设计应具备强大的承载能力和灵活的运动性能。
采用多关节结构设计,使机械臂能够在复杂的高空环境中完成各项任务,如巡视、更换设备等。
3. 传感器配置为了提高机器人的感知能力,需要配置多种传感器设备。
如激光雷达、红外线传感器等用于环境感知和障碍物避免;高清摄像头用于线路检测和故障诊断;热像仪用于检测线路温度异常等。
通过传感器的数据融合,提高机器人的巡线效果和准确性。
4. 控制系统设计机器人的控制系统应具备稳定的性能和灵活的操作接口。
采用高性能的嵌入式控制器,实现机器人的自主巡线、路径规划和数据处理等功能。
控制系统还应支持远程操控和实时监控,方便操作人员对机器人的控制和监控。
5. 能源管理设计机器人的能源管理设计对于实现长时间的巡检任务至关重要。
采用高能量密度的锂电池作为机器人的主要能源,并配置智能充电系统和节能模式,延长机器人的工作时间和寿命。
高压输电线路巡检机器人的专家控制系统

V0 - 8 l3
・
计
算
机
工
程
21 0 2年 8月
A u u t 201 g s 2
N O.5 1
Co u e n i e r g mp trE g n e i n
人 工智 能及 识别 技术 ・
文章编号: o - 48 02 §_ 6. 3 文献 码: l0 32( 1 1_ 16_ 2 ) 0 0 标识 A
[ src]Taio a iset nrb t o ihv lg a s si n a elw itlgn eadcnn t v edl.nodr oslete Abta t rdt n l p ci o os nhg ot et nmis nl e v el ec n a o es a i I re ov i n o a r o i h o n i mo t y t h
中图分类号: P8 TI
高压 输 电线路 巡 检 机 器人 的专 家控 制 系统
苏 伟 ,王吉岱 ,孙爱芹 ,张东岳
( 山东科技大学机械 电子工程 学院,山东 青 岛 2 6 1) 650 接 要:传统高压输 电线路巡检机器人智能化 程度低 、作业不稳定 。为此 , 出一种基于规则的专家控制系统 。给出系统的基本结构和知 提
Ex r n r lS t m fI pe to b t pe tCo t o yse 0 ns ci n Ro o f rH i h Vo t g a m iso ne o g la eTr ns s i n Li
SU eiW A NG - i U N iqi ,ZH AN G ong y W , Jida ,S A - n D — ue
超高压输电线路故障巡检机器人系统设计与优化研究

超高压输电线路故障巡检机器人系统设计与优化研究引言超高压输电线路是电力系统中起关键作用的设备之一,它的安全运行对电网的稳定运行至关重要。
然而,由于其运行环境复杂多变,故障巡检成为一项具有挑战性的任务。
为了提高输电线路故障巡检效率和减少人工干预,设计并优化一套超高压输电线路故障巡检机器人系统显得尤为重要。
一、超高压输电线路故障巡检机器人系统设计1. 巡检机器人结构设计巡检机器人的结构设计直接影响到其在复杂环境中的运行性能。
针对超高压输电线路的特点,设计一种具有灵活性和可靠性的机器人结构。
该结构应具备轮式底盘、可伸缩臂和多关节手爪等功能模块。
轮式底盘能够保证机器人在线路上的稳定行驶。
伸缩臂和手爪模块能够进行各种检修和维护任务,包括更换电气设备、固定螺栓和拧紧导线等。
2. 软硬件系统集成巡检机器人的软硬件系统集成是关键环节。
软件系统应具备路径规划、远程操控和巡检数据分析等功能。
路径规划算法能够根据输电线路的特点和实际情况,规划出最优的巡检路线。
远程操控系统能够实现对机器人的远程控制,提高操作人员的安全性。
巡检数据分析系统能够对机器人收集到的数据进行处理和分析,快速准确地识别可能存在的故障点。
3. 通信技术应用巡检机器人与操作人员的及时沟通对于故障处理非常重要。
利用无线通信技术,实现巡检机器人与操作中心之间的实时数据传输和远程控制。
采用先进的通信技术,如5G网络或卫星通信,可以保证传输的稳定性和可靠性,提高巡检机器人系统的应用效果。
二、超高压输电线路故障巡检机器人系统优化研究1. 效率优化为了提高超高压输电线路故障巡检机器人系统的效率,可以采用多机器人协同作业的方式。
通过合理的任务分配和路径规划,使多台机器人在同一时间内分别对不同区域进行巡检,大大提高了巡检效率。
此外,采用自主充电技术,使机器人能够自动回到充电桩进行充电,降低操作人员的干预。
2. 精度优化超高压输电线路的安全性对于电网的运行具有重要意义。
具有自主导航能力的高压输电线路无人机巡检系统设计
具有自主导航能力的高压输电线路无人机巡检系统设计一、引言随着电力系统的不断发展,高压输电线路在电网中起着至关重要的作用。
由于线路运行环境复杂、线路跨越区域广阔,传统的巡检方式往往存在效率低、安全风险高等问题。
借助无人机技术进行线路巡检成为了一种新的选择。
本文旨在设计一种具有自主导航能力的高压输电线路无人机巡检系统,以提高巡检效率和线路安全性。
二、系统组成1. 无人机:选择具备稳定飞行性能和可靠性的固定翼无人机,能够完成长距离飞行和在高压输电线路附近稳定飞行。
2. 航拍设备:搭载高清摄像头和红外热成像摄像头,用于对线路情况进行实时监测和故障检测。
3. 无线通信设备:用于无人机与地面控制中心之间的数据传输和指令下达。
4. 地面控制中心:用于对无人机进行远程操控和监视,同时将收集的数据进行处理和分析。
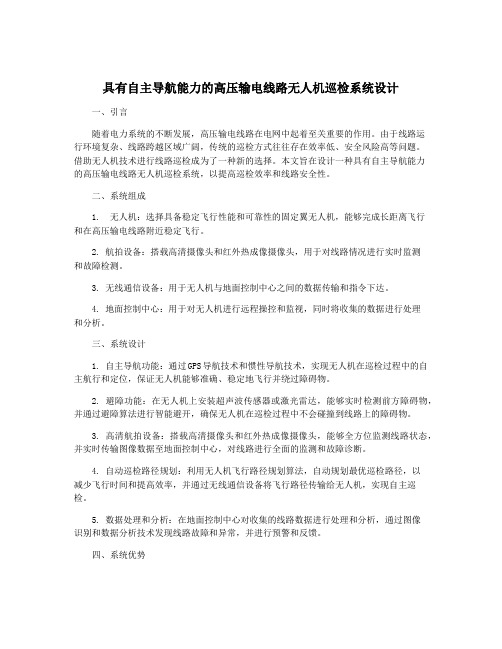
三、系统设计1. 自主导航功能:通过GPS导航技术和惯性导航技术,实现无人机在巡检过程中的自主航行和定位,保证无人机能够准确、稳定地飞行并绕过障碍物。
2. 避障功能:在无人机上安装超声波传感器或激光雷达,能够实时检测前方障碍物,并通过避障算法进行智能避开,确保无人机在巡检过程中不会碰撞到线路上的障碍物。
3. 高清航拍设备:搭载高清摄像头和红外热成像摄像头,能够全方位监测线路状态,并实时传输图像数据至地面控制中心,对线路进行全面的监测和故障诊断。
4. 自动巡检路径规划:利用无人机飞行路径规划算法,自动规划最优巡检路径,以减少飞行时间和提高效率,并通过无线通信设备将飞行路径传输给无人机,实现自主巡检。
5. 数据处理和分析:在地面控制中心对收集的线路数据进行处理和分析,通过图像识别和数据分析技术发现线路故障和异常,并进行预警和反馈。
四、系统优势1. 高效性:无人机巡检系统大大提高了线路巡检的效率,可大幅减少巡线时间和人力成本,提高线路安全性。
2. 安全性:无人机可以避免人员直接接触高压输电线路,降低了巡检过程中的安全风险。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
高压输电线路巡检机器人系统设计摘要:为了实现远距离大功率的电能输送,近年来国家电网及南方电网加大了对智能电网的建设,电力系统最重要的任务是提供高质量和高可靠性的电力,而高压输电线路是远距离电力输送的最重要途径,它的安全稳定运行直接影响着电力系统的可靠性。
高压输电线路长期运行于露天环境中,长期受自然环境、机械张力、外力破坏、电气闪络等不可抗拒因素影响。
目前对输电线路的巡检依然是以人工巡检为主,巡检工作面临巨大难度,受自然条件限制,往往无法巡检大跨越输电线路,人工巡检受视角影响,也无法检查高层设备。
同时受巡检人员人数、技术水平及其他因素影响,巡视质量参差不齐,对线路的巡视存在一定的局限性,无法实现全天候实时监测。
在台风、雨雪等特殊天气条件下,人工巡检存在较大安全风险,甚至无法开展人工巡检。
目前各检修公司面临巡检人员老龄化、新进员工经验少、巡检人员严重不足的窘境,人工巡检数据无法数字化,不利于后期处理。
因此,设计一款智能巡检机器人替代人工巡检高压输电线路,减少危险作业,提高巡检人员安全保障,同时降低电网维护成本,提高电网自动化作业水平,推动智能电网发展。
关键词:高压输电线路;机器人;巡检机器人;引言为了保障电力系统安全运行,加强对野外高压输电线路巡检工作具有很大现实意义。
开展高压输电线路巡检工作,主要目的是检查、排除电力系统潜在的安全隐患,包括防震锤脱落及移位、输电导线及地线断股散股、绝缘子串破裂及丢失等故障,确保电力设备设施安全、稳定地运行。
但是电力线路巡检工作量大,过程复杂、重复机械性操作很多,长此以往会使巡检人员产生心理倦怠,可能因人为因素引起疏漏。
将智能巡检机器人用于高压线输电线路巡检实践中,能显著提升工作的自动化、智能化水平,为智能电网建设发展提供可靠的技术支持。
1电力机器人的研究现状随着智能电网的建设,近年来市面上出现了多种多样的电力机器人,包括:线路巡检机器人,主要是通过搭载可见光相机、红外相机拍摄记录故障点,上传故障报告,通知运维检修人员对故障点进行维修,该型机器人解放了巡检人员,巡检人员无需沿着线路巡视查找故障点,只需根据巡检机器人的工作日志及生成的故障报告,便可前往故障点进行故障确认并维修;作业机器人,包括地线作业机器人和导线作业机器人,地线作业机器人,在作业过程中,线路无需停电便可进行作业工作,通过机器人搭载作业机构,远程操控机器人对故障点进行修复,比如,地线断股修复、防震锤移位、压接管紧固等修复作业,消除故障隐患,但是导线作业机器人作业时,必须停电作业,比如绝缘子修复等必须停电作业以免引起安全事故。
除冰机器人,主要用于去除高压线路地线上的覆冰及积雪,使用机器人上搭载的除冰刀具,沿着地线行走过程中消除积雪以及覆冰,以免地线弧垂过大,导致输电线路出现短路跳闸故障,这种机器人主要使用在北方雨雪天气较多的极寒地区。
异物清除机器人,高压线上时常会出现异物挂于高压线上,比如,风筝、塑料袋等异物,可能会引起短路事故,使用机器人上搭载的作业手臂,将障碍物清除,消除隐患。
随着国内外对线路机器人的研究,智能控制系统是电力机器人最为复杂的技术类型,智能化、自动化更是未来电力机器人的发展方向。
2巡检机器人研制难点架空输电线路巡检机器人运行在高压输电线(地线)上,搭载可见光相机、红外相机、激光雷达等设备对高压线杆塔金具及线路走廊进行巡检,其工作在强电磁场,高空野外环境,机器人金属表面容易积累感应电,因此架空输电线路巡检机器人必须具备稳定可靠的抗电磁干扰,耐高低温,抗大风,防雨等性能特点。
高压线巡检机器人设计开发工作推进过程中之所以较困难,主要是其受到了多种主客观条件的制约,地面上无法模拟高压线路环境,研发的样机不能在模拟的线路环境下进行测试。
同时机器人运行过程中运用相机捕捉、勘察、辨识环境状况,合理调整行进方式与路线,并作出相应的动作,确保能顺利越过障碍。
自主导航和定位是机器人野外工作时必须具备的技术条件,GPS定位、激光扫描、视觉导航是常见的导航技术类型,其中视觉导航运用机器人的摄像头获得环境信息,明确其当前所处方位,进而达到自主导航与行走,这是巡检机器人领域视觉导航难点技术,采用深度学习技术在高空环境下进行视觉处理,以天空为背景进行图像处理,并且需要解决太阳光直射问题,因此,视觉处理机器人智能化的难点。
另外,机器人运行中的防碰撞保护、倾斜保护、检测技术、实时传输技术、线上充电等也是巡检机器人的难点技术。
3跨越式巡检机器人设计3.1总体设计巡检机器人通过安装在塔头的越障装置可以跨越地线上的防震锤行走到地线上,在大跨越铁塔档距之间行走;为解决大跨越线路爬坡角度问题,选用Maxon高功率电机,配合Escon50/5驱动器,电机效率高于90%,最高功率可达170W;主动轮内侧装有高摩擦系数的橡胶,从动轮和主动轮上下夹紧地线可以增大主动轮与地线之间的摩擦力,增强机器人的爬坡能力。
机器人两手臂设计压紧机构,可以预防机器人在线上出现脱轨情况,保障机器人运行的安全性。
为降低地线、杆塔振动带来的不利影响,提高图片、视频的采集质量,采用双光三轴增稳云台,该增稳云台带有红外及可见光摄像头,对导线和地线进行拍照,可以实时监测线路温度变化;所采集图片通过图传模块保存到地面基站,巡检人员可及时查看高压线路及高杆塔金具是否正常,另外,通过4G模块可将机器人自身状态和线路运行数据传回电力公司集控中心,便于巡检人员远程监测。
机器人的整体外形机构图,如下图1所示。
图1机器人的整体外形机构图3.2机器人本体硬件设计该机器人的控制系统采用嵌入式控制系统设计,巡检机器人本体能够利用越障桥行走到地线上,进而在输电线路档距之间无障碍行走。
当巡检机器人本体行走到越障桥时,巡检机器人本体携带的可见光相机能识别越障桥,将信号传给STM32控制系统,调节机器人夹紧力,根据越障桥机械结构、现场风速、风力大小,调整过桥控制算法参数,实时调节电机输出功率和机器人夹紧力大小,控制机器人主动轮电机运行方向和速度,顺利平稳行走到地线上;在地线上行走时,根据地线爬坡角度,实时调节电机输出功率和速度,最大爬坡角度可达45°,满足大跨越线路的要求。
考虑到大跨越输电线路巡检机器人的工作场景,无线通信必须确保其具有低功耗、高可靠性,综合以上考虑,选用SX1262LoRa芯片,用于巡检机器人本体与地面基站进行无线通信,其发射功率可调,传输距离长达十几公里。
该巡检机器人本体可以跨越线路杆塔、防震锤等设备,采用机器人过桥控制算法,巡检机器人本体能平稳跨越越障桥,可在地线上实现上坡、下坡、越障等功能,进而实现大跨越线路内自动化巡检,如采集线路运行信息、定点采集图片、视频等。
机器人硬件设计框图,如下图2所示。
图2机器人硬件设计框图3.3后台维护模块设计(1)设备的运行状态检测:显示灯是否存在异常、系统时钟是否正确;各个功能模块的工作电压是否存在异常;定值区与定值通知单相是否一致;调度核对的模拟量与状态量是否正常;各个零件部位是否存在过热现象;定期对各仪器进行误差检测。
(2)后台控制主机状态检测:主机基本硬件和连接线是否存在松动现象;设备的各个数据量和状态量与实际的运行状态是否一致;是否能够实施远程遥控;通信指示是否正常。
(3)UPS设备检测:检查UPS是否正常工作,其中包括检查设备提供的电压是否存在异常。
(4)数据通道检测:在自动化数据传输的过程中,传输通道的质量起着很大作用,因此在线路日常维护工作中,对通道进行检测尤为重要。
3.4机器人定位系统设计GPS的定位精度受地球电离层、卫星轨道误差等因素影响,导致民用GPS的定位精度很差,其定位误差达到几米,巡检机器人在进行大跨越输电线路自动巡检时,需要实现厘米级别定位,才能准确检测电力设备运行状况、采集到输电走廊及其设备的清晰图片、视频,采用GPS定位无法满足巡检机器人自动巡检定位的要求。
因此,需要在塔头安装差分定位系统基准站,其采用双频载波相位差分技术,即RTK,用于实现机器人自动巡检时的厘米级别定位。
首先塔头基准站将观测到的载波相位测量值和自身的坐标信息一起发送给机器人,通过差分的方式,逐步消除机器人定位测量数据中的误差,Linux系统实时处理相位差分观测值,解算出巡检机器人的行走坐标。
其应用依赖基准站的差分信号,利用差分定位把GPS模块的各种误差计算出来,将其与GPS对基准站的定位结果作比较,就可以得到定位信号的偏差,再将这个偏差发送给需要定位的巡检机器人,就可以使巡检机器人获得相对精准的位置信号。
4巡检机器人发展趋势(1)多传感器巡线机器人。
随着自主巡线机器人技术的成熟和线路故障探测仪器的小型化,在一套巡线机器人上集成多种线路故障探测仪器将是未来趋势,机器人上可以搭载多种传感器同时扫描高压线路及走廊,运用多传感器信息融合技术以更高的分辨率和可靠性发现各种类型的早期故障并加以评估,为维护人员实时提供架空线路设施的工作状态报告。
(2)多自由度攀爬机器人。
现有高压线巡检机器人产品必须借助搭建的过桥才能顺利通过高压杆塔塔头,一定程度上影响了机器人巡检效率和工程项目的开展。
多自由度机器人,通过控制每个关节电机,可以多维度转动机器人手臂,顺利通过高压杆塔塔头,无需搭建过桥。
(4)带电维修作业机器人。
现在高压线输电线路,如果巡检发现部分轻微故障是不能轻易断电维修。
因此,研究高电压环境下智能带电作业机器人有这广阔的市场需求。
带电维修作业机器人,可以实现高压输电线路带电螺栓紧固、带电防震锤更换、带电导线修补、带电绝缘子更换等功能。
(5)飞行机器人。
近年来随着无人机技术的发展,飞爬混合型巡检机器人的研究也是一种新的趋势。
结束语高压输电线路巡检机器人系统在模拟线路运行测试,现场证明机器人行走平稳,运行稳定,实现了输电线路的远程监测和自动化巡检,提高了巡检人员的工作效率和输电线路巡检的智能化水平。
参考文献[1]冯晨光.高压输电线路巡检机器人机构设计及作业性能仿真研究[D].东南大学,2020.[2]程俊东.高压输电线路巡检机器人的设计与仿真分析[D].四川农业大学,2019.[3]张峰,郭锐,卢士彬,李振宇,杨波,孙晓斌.高压输电线路巡检机器人障碍物识别与定位[J].中国电力,2019,52(04):111-118.[4]郭磊,吴功平,麦晓明,彭向阳,杨智勇,周鹏.高压输电线路巡检机器人续航里程的预测方法[J].武汉大学学报(工学版),2018,51(04):347-355.[5]杜欣.高压输电线路智能巡检机器人的研制与应用[J].城市建设理论研究(电子版),2017(29):141.[6]何缘,吴功平,肖华.高压输电线路巡检机器人机构设计及运动学分析[J].高压电器,2016,52(06):61-68.[7]何缘,吴功平,王伟,杨智勇.高压输电线路智能巡检机器人的研制与应用[J].武汉大学学报(工学版),2016,49(03):446-451+464.[8]卢坤媛,王吉岱.高压输电线路巡检机器人机械结构研究现状及发展趋势[J].机床与液压,2020-01-28[9]刘贞瑶,高方玉,姜海波等.输电线路智能巡检机器人系统的研制及应用[J].电力信息与通信技术,2017-12-10。