基于PLC--S7-200PLC四节传送带的模拟实训报告
PLC四节传送带的模拟控制
电气工程学院课程设计说明书(2012 /2013 学年第一学期)课程名称:可编程序控制器题目:四节传送带的模拟控制学生姓名:学号:1、课程设计目的可编程序控制器,英文全称Programmable Controller,简称PLC。
它是一个以微处理器为核心的数字运算操作电子系统装置,转为在工业现场应用而设计,采用可编程序的存储器,用以在其内部存储执行逻辑运算、顺序控制、定时/计数和算术运算等操作指令,并通过数字式或模拟式的输入/输出接口,控制各种类型的机械或生产过程。
PLC式微机技术与传统的继电接触控制技术相结合的产物,它克服了继电接触控制系统中的机械触点接线复杂、可靠性低、功耗高、通用性和灵活性差等缺点,充分利用了微处理器的优点,有照顾到了现场电气操作维修人员的技能与习惯,特别是PLC的程序编制,不需要专门的计算机编程语言知识,而是采用了一套以继电器梯形图为基础的简单指令形式,使用户程序编制形象、直观、方便易学,调试和简易的用户程序编制工作,就灵活方便地将PLC应用于生产实践之中。
(1)了解普通轧钢机的结构和工作工程。
(2)弄清有哪些信号需要检测,写明各路检测信号到PLC的输入通道,包括传感器的原理、连接方法、信号种类、信号调理电路、引入PLC的接线以及PLC中的编址。
(3)弄清有哪些执行机构,写明从PLC到个执行机构的各输出通道,包括各执行机构的种类和工作机理,驱动电路的构成,PLC输出信号的种类和地址。
(4)绘制出轧钢机电控系统的电路原理图,编制I/O地址分配表。
(5)编制PLC的程序,结合实验室设备完成系统调试,在实验室手动仿真模型上仿真轧钢机工作过程的控制。
2、实验内容2.1控制要求起动后,先起动最末的皮带机,1s后再依次起动其它的皮带机;停止时,先停止最初的皮带机,1s后再依次停止其它的皮带机;当某条皮带机发生故障时,该机及前面的应立即停止,以后的每隔1s顺序停止;当某条皮带机有重物时,该皮带机前面的应立即停止,该皮带机运行1s后停止,再1s后接下去的一台停止,依此类推。
基于S7-200的四节传送带PLC控制

中文摘要现今的社会.科技发展迅速,在工业方而,计算机技术、半导体技术、控制技术、数字技术、通信网络技术等髙新技术的发展息息相关,这些髙新技术推动了PLC的发展。
今天, 我们的生活环境和工作环境有越来越多称之为可编程控制器的小电脑在为我们服务,可编程控制器在工业控制,尖端武器,通信设备,信息处理,家用电器等各测、控制领域的应用中独占幣头。
本四级传送带电路采用PLC为控制核心,具备顺序起动和顺序停止功能,当某条皮带机发生故障时,该皮带机及其前而的皮带机立即停I匕的自动控制等功能。
利用本次设计,初步掌握PLC的基本控制功能,学会运用PLC,控制基本工业控制.关键词:传送带,皮带机,可编程控制器ABSTRACTIn toda/s society, the rapid development of technology, in the industry, computer technology.毕业设计用纸semiconductor technology, control technology, digital technology, communication network technology development, the new and high technology to promote the development of PLC. Today, our living environment and working environment, more and more as a programmable controller of small computer in our service, the programmable controller in the industrial control, sophisticated weapons, communications equipment, information processing. home appliances and other various measuring. control is used in the fields of exclusive top・ The four conveyor circuit using PLC as the control core, have the start sequence and sequence stop function, when a belt machine when a failure occurs ・ the belt machine and the front of the belt conveyor to immediately stop the automatic control function. Using this design, the preliminary master the basic PLC control function, to learn how to use PLC, control the basic industrial control.Keywords: conveyor. belt machine , programmable controller第一章绪论 (1)1.1 PLC的概述 (1)1.2四节传送带设计的目的 (2)1.3传统传送带与多节传送带的比较 (2)1.4四节传送带系统的发展 (2)第二章总体方案 (3)2.2四节传送带的设计方案 (3)2.2. 1方案的选择 (3)2.2. 2控制要求 (3)第三章系统的硬件设计 (5)3.1系统硬件分析 (5)3.2四节传送带的硬件接线图 (5)3.3电路工作过程 (6)3.3. 1顺序启动 (6)3. 3. 2顺序停止 (6)3. 3.3传送带A上有重物时的停止 (6)3. 3.4传送带B上有重物时的停止 (7)3.3.5传送带C上有重物时停止 (7)3.3.6传送带D上有重物时停止 (7)第四章系统的软件设计 (8)4.1四节传送带的系统流程图 (8)4.2 I/O分配表 (9)4.3梯形图 (9)第五章系统的调试 (10)5.1软件部分调试 (10)5.2硬件部分调试 (10)毕业设讣用纸结论 (11)致谢 (12)参考文献 (12)附录 (13)第一章绪论1.1 PLC的概述可编程序控制器英文称Programmable Controller简称PC”但由于PC和个人计算机Personal Computer混淆故人们仍习惯地用PLC作为可编程序控制器的缩写。
四节传送带的模拟控制
组
成
员
姓名
学号
成绩
互评(70%)
姓名
1
2
3
4
总分
评价记录:
签字:
2.I/O口分配表
输入
输出
元件
功能
信号地址
元件
功能
信号地址
按钮SB1
工作台启动
X001
传送带③
运行
Y003
按钮SB2
工作台停止
X002
传送带④
运行
Y004
传送带①
运行
Y001
辅助继电器
控制
M1
传送带②
运行
Y002
定时器
定时元件
T
3.I/O口接线图
4.梯形图程序
5.软硬件调试情况
根据梯形图连接号实验台上的线路后,可以实现按下启动按钮,传送带4开始运行,随后的时间每隔2秒钟下一个传送带运行,直至4个传送带全部运行。
按下停止按钮,传送带1停止运行,在随后时间每隔2秒停止一个传送带,直至4和都停止运行。
6.总结
(1.实现的功能与不足
2.完成过程中间的困难
3.该项目过程中间的学习情况)
实现的功能:实现了预期效果,四节分段启动,分段停止。
不足:
过程中的困难:
三
评价表
时间:班级:组别:
任务
项目2四节传送带的模拟控制
自评(30%)
XXXXXXXXXXX学院
电子技术应用专业
《PLC控制器应用与实践》
项目2四节传送带的模拟控制
组别:XX
姓名:XXX
学号:XX
班级:XXX
授课老师:
Hale Waihona Puke 项目二、四节传送带的模拟控制
PLC四节传送带课程设计

网络1
LD I0.0
O M1.0
AN I0.5
S Q0.4, 1
= M1.0
网络2
LD M1.0
TON T37, +10
网络3
LD T37
S Q0.3, 1
= M2.0
网络4
LD M2.0
TON T38, +10
网络5
LD T38
S Q0.2, 1
= M3.0
网络6
LD M3.0
TON T39, +10
网络7
LD T39
S Q0.1, 1
网络8
LD I0.5
O M4.0
AN I0.0
R Q0.1, 1
= M4.0
网络9
LD M4.0
TON T40, +10
网络10
LD T40
R Q0.2, 1
= M5.0
网络11
LD M5.0
TON T41, +10
网络12
LD T41
R Q0.3, 1
= M6.0
本次课程设计是应用S7-200 PLC控制四节传送带系统的硬件电路,并利用梯形图控制程序设计。通过控制S7-200 PLC的定时继电器的功能来实现四条皮带的运行,熟悉掌握好定时器和PLC中基本的软组件使用方法和作用,按照选题利用定时器和继电器特点进行编程,使按下某按钮后实现不同的功能当程序编好后,利用S7-200软件调试系统进行调试,根据功能要求使其一步步实现。其中每个程序都进行反复调试,直至实现相应的功能。如果调试没有成功再校验程序有没有输入错误或者检查程序是否编辑错误,就这样周而复始直至程序调试成功。
网络13
plc实训报告实训总结
plc实训报告实训总结第一篇:《PLC实训,那些事儿》这周我们专业课上了一个关于PLC编程的实训,说真的,一开始我是挺抗拒的,因为编程这玩意儿对我来说就像天书一样。
不过,后来发现其实也没那么难嘛,关键是得找对方法。
实训的第一天,老师先给我们讲解了PLC的基本概念,然后就让我们自己动手了。
我跟我的小伙伴小张一组,刚开始的时候,我们俩对着电脑屏幕发呆,不知道从何下手。
还好,老师很耐心地一步步指导我们,慢慢地,我们就摸到了门道。
小张还开玩笑说:“这不就跟咱们小时候玩的电子游戏差不多嘛,只不过现在是让机器按我们的想法动起来。
”最有趣的是我们尝试控制一个小型传送带的时候,第一次编程完成后,传送带怎么也不动,我们都快急死了。
后来检查了好几遍代码,才发现原来是一个小小的语法错误。
修正之后,当传送带顺利运转起来那一刻,我们俩激动得差点跳起来,感觉比拿到满分还要开心。
这次实训让我意识到,其实学习新东西并不像想象中那么可怕,只要肯花时间和精力去钻研,总能有所收获。
而且,团队合作真的很重要,遇到难题大家一起解决,效率高多了。
最重要的是,这个过程真的挺好玩的,感觉自己好像解锁了一项新技能,对未来充满了期待。
第二篇:《PLC实训,不只是编程》提到PLC实训,很多人第一反应可能是“枯燥”、“难”。
但实话说,这次实训给我的印象远不止于此。
它不仅仅是一次技术上的练习,更是一次心灵上的成长之旅。
实训开始前,我对PLC编程一窍不通,心里没底得很。
不过,当真正接触到实际操作后,我发现这其实是一门艺术。
通过编写代码,可以让冰冷的机器按照自己的意志工作,这种感觉太酷了。
我和搭档小李一起合作,他负责查资料,我则负责编写代码。
我们互相鼓励,遇到问题共同解决,那种成就感是难以言喻的。
最难忘的是我们尝试模拟工厂自动化生产线的那个项目。
为了实现这个目标,我们几乎天天泡在实验室里,从早到晚。
有时候,为了调试一个功能,我们能连续好几个小时盯着屏幕,眼睛都快花了。
plc传送带实训报告实训目的意义和要求

plc传送带实训报告实训目的意义和要求PLC传送带实训报告实训目的:PLC传送带实训旨在通过实践操作,使学生能够熟悉并掌握PLC(可编程逻辑控制器)的基本原理和应用技巧。
通过该实训,学生将学习如何将传送带与PLC相结合,实现自动化生产线的控制和监控。
意义和要求:1. 理解PLC的基本原理:学生需了解PLC的工作原理、组成部分以及常见的输入和输出设备。
2. 掌握PLC编程:学生需要学会使用PLC编程软件,编写简单的逻辑程序,并能够将程序下载到PLC中。
3. 熟悉传送带控制:学生需要了解传送带的基本结构和工作原理,并能够将传送带与PLC相连接,实现对其速度、方向等参数的控制。
4. 实现自动化生产线控制:学生需要将多个传送带串联起来,通过编写逻辑程序,实现产品在不同传送带之间的流动和分拣。
以下是对每个部分进行详细说明:一、PLC基本原理1.1 PLC工作原理PLC是一种用于自动化控制系统的电子设备,它通过接收输入信号,并根据预设的逻辑程序进行处理,最终控制输出设备的状态。
PLC工作原理主要包括输入模块、中央处理器、输出模块和电源等组成部分。
1.2 PLC组成部分输入模块:用于接收外部传感器等输入信号,并将其转换为PLC能够识别的电平信号。
中央处理器:负责执行逻辑程序,对输入信号进行处理,并控制输出设备的状态。
输出模块:根据中央处理器的指令,控制输出设备(如电机、气缸等)的工作状态。
电源:为PLC提供稳定可靠的电力供应。
1.3 常见的PLC输入和输出设备输入设备:开关、传感器(如光电传感器、接近开关等)、按钮等。
输出设备:继电器、电机驱动器、气缸等。
二、PLC编程2.1 PLC编程软件介绍市场上常见的PLC编程软件有Siemens STEP 7、Rockwell RSLogix 5000等。
这些软件提供了图形化界面和丰富的功能库,方便用户编写逻辑程序。
2.2 PLC编程语言PLC编程语言主要包括梯形图(Ladder Diagram)、指令列表(Instruction List)、功能块图(Function Block Diagram)等。
PLC课程设计 四节传送带的模拟

PLC课程设计四节传送带的模拟
四节传送带模拟
传送带技术是一种广泛使用的生产装置,广泛应用于物流、食品、机械制造行业,用来运送物品、材料或任何重要信息,从而提高生产效率,减少劳动力成本。
四节传送带模拟(simulating-four-chained-conveyors)由四节相互连接的传送带装置所组成,每节传送带可以自由移动,起到转移物料的作用,传送速度、载荷均可调节,广泛应用在工业生产上。
四节传送带模拟的实现原理:使用PLC(程序控制器)和传感器(如光电、按钮),通过反馈调节四节传送带的运转情况,传感器感知物料或信息,输出信号驱动电机从而运转,起到转移物料的作用,同时可以进行物料计数,增强传送精准度。
1、使用PLC来控制电机,根据传送带的载荷情况及当前物料数量等,设置电机的U、V及W相控制;
2、在传输带上安装光电传感器,实时收集物料信息,通过反馈给PLC,给出每个节点的位置信息;
3、设置PLC的输出控制信号,控制传送带的每节电机的启动、停止及变速;
4、安装在进料点上的按钮,用于调节每节传送带上物料的数量,如有必要时,还可开启手动模式,使用人工参与调速;
5、安装在出料点上的按钮,用于实现物料在出料处的控制,是否停止传送。
综上所述,四节传送带的模拟借助PLC技术和传感器,借助按钮来实现模拟操控,配合调节设备可以实现四节传送带的运行及调节,进而提高生产效率,实现生产的自动化。
四节传送带的模拟1
四节传送带的模拟
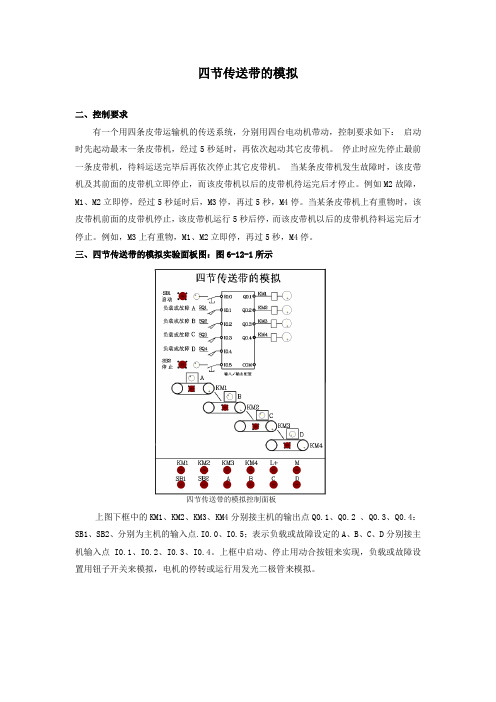
二、控制要求
有一个用四条皮带运输机的传送系统,分别用四台电动机带动,控制要求如下:启动时先起动最末一条皮带机,经过5秒延时,再依次起动其它皮带机。
停止时应先停止最前一条皮带机,待料运送完毕后再依次停止其它皮带机。
当某条皮带机发生故障时,该皮带机及其前面的皮带机立即停止,而该皮带机以后的皮带机待运完后才停止。
例如M2故障,M1、M2立即停,经过5秒延时后,M3停,再过5秒,M4停。
当某条皮带机上有重物时,该皮带机前面的皮带机停止,该皮带机运行5秒后停,而该皮带机以后的皮带机待料运完后才停止。
例如,M3上有重物,M1、M2立即停,再过5秒,M4停。
三、四节传送带的模拟实验面板图:图6-12-1所示
四节传送带的模拟控制面板
上图下框中的KM1、KM2、KM3、KM4分别接主机的输出点Q0.1、Q0.2 、Q0.3、Q0.4:SB1、SB2、分别为主机的输入点.I0.0、I0.5;表示负载或故障设定的A、B、C、D分别接主机输入点I0.1、I0.2、I0.3、I0.4。
上框中启动、停止用动合按钮来实现,负载或故障设置用钮子开关来模拟,电机的停转或运行用发光二极管来模拟。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实训报告题目名称:四节传送带的模拟系部:电气与信息工程系专业班级:自动化13-1学生姓名:赵新勇学号:2013210730指导教师:徐立军完成日期:2017.1.5新疆工程学院实训评定意见实训题目四节传送带的模拟系部电气与信息工程系专业班级自动化13-1学生姓名赵新勇学生学号2013210730评定意见:评定成绩:指导教师(签名):年月日评定意见参考提纲:1、学生完成的工作量与内容是否符合任务书的要求。
2、学生的勤勉态度。
3、设计或说明书的优缺点,包括:学生对理论知识的掌握程度、实践工作能力、表现出的创造性和综合应用能力等。
新疆工程学院电气与信息工程系(部)实训任务书2016/2017学年上学期2017年1月3日教研室主任(签名)系(部)主任(签名)摘要20世纪70年代,诞生了两种改变整个世界及商业管理模式的计算机。
产生于1976年的苹果II型,是世界上最早得到广泛使用的微型计算机。
当今价值数十亿美元的个人计算机产业就是从这个当初由两名年轻人在车库里成立的小公司衍生而来的。
另外一类计算机,是由Richard Morley在1972年发明的,如今称之为可编程逻辑控制器(PLC)。
它最初并没有像个人计算机那样得到名称上的广泛认同,但是却给制造业带来了同样意义重大的冲击。
PLC通常被称为工厂级别的个人计算机。
随着科学技术的发展,电器控制技术在个领域中得到越来越广泛的应用。
可编程序控制器(PLC)的应用使电器控制技术发生了根本的变化。
今天,我们的生活环境和工作环境有越来越多称之为可编程控制器的小电脑在为我们服务,可编程控制器在工业控制,尖端武器,通信设备,信息处理,家用电器等各测、控制领域的应用中独占鳌头。
PLC可编程序控制器是以微处理器为基础综合了计算机技术、半导体技术、自动控制技术、数字技术和网络通讯技术发展起来的一种通用工业自动控制装置。
它具有结构简单、编程方便、可靠性高等优点,已广泛用于工业过程和位置的自动控制中。
本设计就是应用可编程控制器来实现模拟四条皮带运输机的传送系统,分别用四台电动机带动,完成相应的控制要求。
关键词:可编程控制器PLC;四节传送带装置;电气控制;目录1概述 ------------------------------------------------------------------------------------------------------------- 11.1 PLC的概述 ------------------------------------------------------------------------------------------ 11.2 PLC的历史 ------------------------------------------------------------------------------------------ 11.3PLC的主要功能 ----------------------------------------------------------------------------------- 11.4 PLC的主要特点 ----------------------------------------------------------------------------------- 21.5 PLC的网络通信 ----------------------------------------------------------------------------------- 32 S7-200的指令系统及编程---------------------------------------------------------------------- 32.1编程语言 ---------------------------------------------------------------------------------------------- 32.2四节传送带系统的发展------------------------------------------------------------------------- 43 总体设计---------------------------------------------------------------------------------------------------- 53.1 四节传送带系统的工作要求 ---------------------------------------------------------------- 53.2功能说明 ---------------------------------------------------------------------------------------------- 5 4程序设计 ----------------------------------------------------------------------------------------------------- 8 5仿真与调试------------------------------------------------------------------------------------------------ 145.1调试 ---------------------------------------------------------------------------------------------------- 15 6总结 ------------------------------------------------------------------------------------------------------------ 16 7致谢 ------------------------------------------------------------------------------------------------------------ 17 参考文献 ------------------------------------------------------------------------------------------------------- 181概述1.1 PLC的概述可编程逻辑控制器,PLC (Programmable Logic Controller),一种数字运算操作的电子系统,是以微机处理器为基础,综合了计算机技术、半导体集成技术、自动控制技术、数字技术和通信网络技术发展起来的一种通用工业自动控制技术,它采用一类可编程的存储器,用于其内部存储程序,执行逻辑运算,顺序控制,定时,计数与算术操作等面向用户的指令,并通过数字或模拟式输入/输出控制各种类型的机械或生产过程。
它面向控制过程、面向用户、适应工业环境、操作方便、可靠性高,成为现代工业控制的三大支柱之一。
1.2 PLC的历史在PLC问世之前,工业控制领域中是继电器控制站主导地位。
继电器控制系统有着十分明显的缺点:体积大、耗电多、可靠性差、寿命短、运行速度慢、适应性差等,而PLC是从早期的继电器逻辑控制系统发展而来的。
自1836年继电器问世,人们就开始用导线将它同开关器件巧妙地连接,构成用途各异的逻辑控制或顺序控制。
上世纪60年代末,它不断吸收微计算机技术使之功能不断增强,逐渐适合复杂的控制任务。
随着微电子技术、计算机技术和数据通信技术的飞速发展、微处理器的出现,以及流程加工行业(如汽车制造业)对生产流程迅速、频繁变更的需求,PLC技术出现并快速发展。
目前,PLC在小型化、大型化、大容量、强功能等方面有了质的飞跃,使早期的PLC从最初的逻辑控制、顺序控制,发展成为具有逻辑判断、定时、计数、记忆和算术运算、数据处理、联网通信及PID回路调节等功能的现代PLC。
但是,仍然沿用着顺序扫描、程序控制等基本模式及CPU+通信+I/O的基本结构。
PLC之所以有生命力,在于它更加适合工业现场和市场的要求:高可靠性、强抗各种干扰的能力、编程安装使用简便、低价格长寿命。
它的输入输出端更接近现场设备,不需添加太多的中间部件或需要更多的接口,这样节省了用户时间和成本。
PLC的下端(输入端)为继电器、晶体管和晶闸管等控制部件,而上端一般是面向用户的微型计算机。
PLC的诸多优点确定了其在工业中的广泛应用。
1.3 PLC的主要功能1、控制功能。
包括顺序控制、逻辑控制、定时、计数等。
2、数据采集与输出。
3、输入/输出接口调理功能。
具有A/D、D/A转换功能,通过I/O模块完成对模拟量的控制和调节,具有温度、运动等测量接口。
4、数据处理功能。
包括基本数学运算、比较、对字节的运算、PID运算、滤波等。
5、支持人机界面功能。
提供操作者以监视机器/过程工作必需的信息。
允许操作者和PC系统与其应用程序相互作用,以便作决策和调整,实现工业计算机的分散和集中操作与监视系统。
6、通信、联网功能。
现代PLC大多数都采用了通信、网络技术,有RS232或RS485接口,可进行远程I/O控制,多台PLC可彼此间联网、通信,外部器件与一台或多台可编程控制器的信号处理单元之间,实现程序和数据交换,如程序转移、数据文档转移、监视和诊断。
在系统构成时,可由一台计算机与多台PLC构成“集中管理、分散控制”的分布式控制网络,以便完成较大规模的复杂控制。
通常所说的SCADA系统,现场端和远程端也可以采用PLC作现场机。
7、编程、调试等,并且大部分支持在线编程。
1.4 PLC的主要特点1、结构形式多样,模块化组合灵活。
有固定式适于小型系统或机床,组合式适于集控制系统。
最少的PLC只有6点,而AB的ControlLogix系统的容量达128000点。
2、可靠性高。
PLC的MTBF一般在40000~50000h以上,有的在10-20万h,且均有完善的自诊断功能。
3、编程方便。
控制具有极大灵活性。
PLC作为通用工业控制计算机,是面向工矿企业的工控设备。
它接口容易,编程语言易于为工程技术人员接受。
梯形图语言的图形符号与表达方式和继电器电路图相当接近,只用PLC的少量开关量逻辑控制指令就可以方便地实现继电器电路的功能。
为不熟悉电子电路、不懂计算机原理和汇编语言的人使用计算机从事工业控制打开了方便之门。