最新Fanuc机器人devicenet连接配置
FANUC DEVICENET配置说明

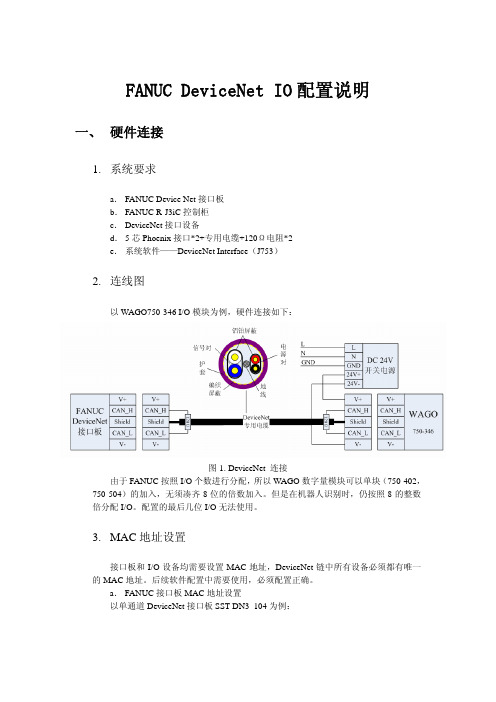
FANUC DeviceNet IO 配置说明一、硬件连接1.系统要求a.FANUC Device Net 接口板b.FANUC R-J3iC 控制柜c.DeviceNet 接口设备d. 5 芯Phoenix 接口*2+专用电缆+120Ω电阻*2e.系统软件——DeviceNet Interface(J753)2.连线图以WAGO750-346 I/O 模块为例,硬件连接如下:图 1. DeviceNet 连接由于FANUC 按照I/O 个数进行分配,所以WAGO 数字量模块可以单块(750-402,750-504)的加入,无须凑齐8 位的倍数加入。
但是在机器人识别时,仍按照8 的整数倍分配I/O。
配置的最后几位I/O 无法使用。
3.MAC 地址设置接口板和I/O 设备均需要设置MAC 地址,DeviceNet 链中所有设备必须都有唯一的MAC 地址。
后续软件配置中需要使用,必须配置正确。
a.FANUC 接口板MAC 地址设置以单通道DeviceNet 接口板SST-DN3–104 为例:接口板MAC 地 址拨码开关 (DIP )图 2. 接口板MAC 地址设置b. Device Net I/O 设备 MAC 地址设置以 WAGO (750-346)模块为例:图 3. WAGO (750-346)MAC 地址设置二、 软件设置完成硬件连接后,开始软件配置。
必须确保机器人先于 DeviceNet设备上电,否则有很大几率出现设备无法连接的问题。
1. 进入 MENUS->I/O->DeviceNet 界面。
将当前使用的接口卡激活(ONLINE )。
如果出现无法激活的情况,请检查接口卡的MAC 地址设置。
确保DIP 开关号与插槽号(RACK)相一致。
图4. 激活DeviceNet 接口卡2.板卡激活后,按DIAG 键进入诊断界面,开始寻找外部I/O 设备。
如果不确定外部设备的MAC 地址,点击BROWSE 键可以自动寻找外部设备。
KUKA机器人DEVICENET主站通讯配置

KUKA机器人DEVICENET主站通讯配置基于随机的MFC卡先从KUKA机器人电脑主机里备份出系统文件(archive)压缩文件,解压文件。
一:KUKA机器人总线配置1.在文件夹:\archive\archive\C\KRC\Roboter\Init 中找到iosys.ini 文件双击打开进行通信协议和IO配置。
2.首先进行通信协议配置,找到相应的文件名:如:使用DeviceNet协议通信,找到[DRIVERS]目录下找到;DEVNET=2,dnInit,dndrv.o 去掉前面分号即可以。
即DEVNET=2,dnInit,dndrv.o 通行协议配置完成。
3. 其次进行IO配置如;使用DeviceNet协议通信找到[DEVNET]目录下配置输入、输出输入信号;Inw0=1,0,x30 ;1 as MACID 把前面的分号去点就可以:即Inw0=1,0,x30 ;1 as MACID输出信号;Outw0=1,0,x10 把前面的分号去点就可以:即Outw0=1,0,x10IO配置完成如图1:信号说明图1KUKA机器人系统默认为主站4.保存,总线配置完成。
二:通信参数设置:在文件夹:\archive\archive\C\KRC\Roboter\Init 找到denet文件,双击打如下:[krc]debug=0 …………………………….. 此项有系统默认baudrate=500…………………………波特率分有3种分别125,250,500[1]macid=1……………………………...1表示子站站号(选择和机器人通信的子站站号)保持原有文档格式,需要注解时,请在你要注解行的下一行加分号,注解写在分号后即可以。
保存,通信参数配置完成。
三:信号配置:在文件夹: \archive\archive\KRC\R1\System 找到$config.dat文件双击打开文件件。
1.进入编辑模式:如图点击Edit 出现下拉菜单选择Edit-Mode进入编辑模式3.找到; Userdefined Variables目录下输入你所需要的信号格式:如图上面是按位配置,也可按字来配置。
电气FANUC机器人的通讯(特制材料)

FANUC机器人的通讯-------PROFIBUS-DP&DEVICE NET本文主要以FANUC机器人为中心,介绍FANUC机器人与SIEMENS PLC 的PROFIBUS-DP通讯以及FANUC机器人与FRONIUS焊机的DEVICE NET通讯。
一、FANUC机器人与SIEMENS PLC的PROFIBUS-DP通讯1.硬件准备本文采用的PLC为S7-300 CPU317-2PN/DP,FANUC机器人型号为,以PLC 为主站,FANUC机器人为从站,通过DP线连接。
FANUC机器人的PROFIBUS-DP 通讯板卡处连接如下图所示。
2.软件设置(1)PLC组态组态主站系统后,在DP网上挂上FANUC机器人并组态通讯区。
a)站号分配b)I/O地址分配:采用默认的8Byte Out 10Byte In,起始地址无重复占用即可(2)机器人示教盒设置a)站地址设置进入菜单-6设置-1PROFIBUS-ENTER。
将3站地址设置成与PLC组态时的地址一致,并将6单次报错设为禁用。
注:在未进行DP通讯前,若要使机器人动作,6单次报错应设为启用。
b)波特率设置按下F3进入[其他]-选择总站参数参数中的波特率应与PLC组态中的传输速度一致,若需修改,可通过F4[选择]进行更改。
c)I/O分配设置进入菜单-I/O-数字-ENTERPLC从站组态时地址分配为8 Byte Out,因此机器人中只需使用DI[1-64],将机架设置为67,插槽为1,开始为1。
注:PLC的输出(OUT)相当于机器人的输入(IN),插槽67代表PROFIBUS-DP 通讯。
按F3 IN/OUT切换至DO设置,同理,PLC从站组态时地址分配为10 Byte In,因此机器人中只需使用DO[1-80]。
重新设置I/O地址后图中状态一栏显示PEN表明设置正确为可用状态,此时应重启控制器,激活设置。
状态栏显示ACTIV时为可用并已激活,UNASG为不可用。
C2 devicenet 配置

与KUKA机器人的通讯配置一、与KUKA机器人(KR C2控制柜)的通讯配置二、https:///a/vihexoo.html6.1 查看软件安装情况主要是查看弧焊软件包:ArcTechAnalog是否安装。
查看方法:准备运行—安装附加软件,如果没有安装就按照安装软件步骤进行安装。
6.2 查看DeviceNet驱动是否安装前提:弧焊软件包ArcTechAnalog已经安装;专家模式。
6.2.1 查看弧焊软件包是否安装配置——输入/输出驱动程序——驱动复位;如果没有安装DeviceNet驱动会显示“驱动程序没安装!”。
6.2.2 DeviceNet驱动安装配置——输入/输出驱动程序——驱动复位;此时显示上面的两个图片,同时在界面的左下角有软按键“配置”。
6.3 通讯地址、IO配置前提:弧焊软件包ArcTechAnalog已经安装、DeviceNet驱动已安装;专家模式。
6.3.1 设置通讯地址机器人为主站通讯地址为0,焊机、WAGO模块为从站通讯地址大于等于1都可以,但公司已经形成规定,焊机地址为5,WAGO地址为10。
配置步骤:上图的右下角软按键“配置”,单击进入下面的画面再按下回车键:按照上图中的地址配置。
6.3.2 IO地址配置A:将DeviceNet有效进入下个界面,将[DRIVERS]下面的“;DEVNET=2,dnInit,dn2drv.0”句首的“;”去掉。
B:进入到上个界面后,往下翻后就可以将焊机通讯IO分配找到“[DEVNET]”这一行,在这行的下面,输入下面的内容:C:进入到KRC\R1\System\$config.dat:打开路径R1/System/$config,就打开了config.dat文件,红色和蓝色语句表示它包含下一级语句,绿色语句是最底层语句无下一级。
将光标移动到ARCTECHANALOG GLBALS,按:编辑——折合——打开/关闭当前折合;将光标移动到ArcTech Outputs按:编辑——折合——打开/关闭当前折合,按照图配置下面的语句;将光标移动到ArcTech Outputs按:编辑——折合——打开/关闭当前折合,按照图配置下面的语句。
DeviceNet接线说明及从站添加方法

DeviceNet模块接线及TwinCat3添加DeviceNet从站方法DviceNet 接线规则及注意事项接线图红黑是一组,蓝白是一组注意事项1.其中3为地线或屏蔽层。
为避免环流对信号造成干扰,通讯电缆的屏蔽线只需要一端接地,接地点为最接近整个系统中性点的位置。
2.只需要在devicenet网络的最末端配置终端电阻3.不同设备的接线顺序是不一样的,需要参考厂家资料,如倍福EL6752,1-2-3-4-5脚定义的是24v、CANH、shield、CANL、0VABB机器人Devicenet接线端子的1-2-3-4-5脚的定义顺序是0V、CANL、shield、CANH、24v,接线顺序和倍福的模块刚好相反。
4.其中至少一端要配置电源BeckHoff TwinCat3如何添加DeviceNet从站1.从机器人robotstudio安装目录下找到所配置DeviceNet从站的说明文件C:\ProgramData\ABB Industrial IT\Robotics IT\DistributionPackages\ABB.RobotWare-6.07.1011\RobotPackages\RobotWare_RPK_6.07.1011\utility\service\EDS文件名称为IRC5_Slave_DSQC1006.eds2.复制该文件IRC5_Slave_DSQC1006.eds到TC3的安装目录中C:\TwinCAT\3.1\Config\Io\DeviceNet,3.IRC5_Slave_DSQC1006.eds文件可以用notepad打开,注意看描述说明4.打开TC3,在6752下面手动添加从站。
FANUC DEVICENET IO配置说明
FANUC DeviceNet IO配置说明一、 硬件连接1.系统要求a.FANUC Device Net接口板b.FANUC R-J3iC控制柜c.DeviceNet接口设备d.5芯Phoenix接口*2+专用电缆+120Ω电阻*2e.系统软件——DeviceNet Interface(J753)2.连线图以WAGO750-346 I/O模块为例,硬件连接如下:图1. DeviceNet 连接由于FANUC按照I/O个数进行分配,所以WAGO数字量模块可以单块(750-402,750-504)的加入,无须凑齐8位的倍数加入。
但是在机器人识别时,仍按照8的整数倍分配I/O。
配置的最后几位I/O无法使用。
3.MAC地址设置接口板和I/O设备均需要设置MAC地址,DeviceNet链中所有设备必须都有唯一的MAC地址。
后续软件配置中需要使用,必须配置正确。
a.FANUC接口板MAC地址设置以单通道DeviceNet接口板SST-DN3–104为例:插槽号(RACK)DIP序号(1-6位)81000000820000018300001084000011接口板MAC地址拨码开关(DIP)图2. 接口板MAC地址设置b.Device Net I/O设备MAC地址设置以WAGO(750-346)模块为例:图3. WAGO(750-346)MAC地址设置二、 软件设置完成硬件连接后,开始软件配置。
必须确保机器人先于DeviceNet设备上电,否则有很大几率出现设备无法连接的问题。
1.进入MENUS->I/O->DeviceNet界面。
将当前使用的接口卡激活(ONLINE)。
如果出现无法激活的情况,请检查接口卡的MAC地址设置。
确保DIP开关号与插槽号(RACK)相一致。
图4. 激活DeviceNet接口卡2.板卡激活后,按DIAG键进入诊断界面,开始寻找外部I/O设备。
如果不确定外部设备的MAC地址,点击BROWSE键可以自动寻找外部设备。
[电气]FANUC机器人的通讯
![[电气]FANUC机器人的通讯](https://img.taocdn.com/s3/m/32a38427647d27284b73513d.png)
FANUC机器人的通讯通讯板卡处连接如下图所示。
2.软件设置a)站号分配b)I/O地址分配:采用默认的8Byte Out 10Byte In,起始地址无重复占用即可(2)机器人示教盒设置a)站地址设置进入菜单-6设置-1PROFIBUS-ENTER。
将3站地址设置成与PLC组态时的地址一致,并将6单次报错设为禁用。
注:在未进行DP通讯前,若要使机器人动作,6单次报错应设为启用。
b)波特率设置按下F3进入[其他]-选择总站参数参数中的波特率应与PLC组态中的传输速度一致,若需修改,可通过F4[选择]进行更改。
c)I/O分配设置进入菜单-I/O-数字-ENTERPLC从站组态时地址分配为8 Byte Out,因此机器人中只需使用DI[1-64],将机架设置为67,插槽为1,开始为1。
注:PLC的输出(OUT)相当于机器人的输入(IN),插槽67代表PROFIBUS-DP 通讯。
按F3 IN/OUT切换至DO设置,同理,PLC从站组态时地址分配为10 Byte In,因此机器人中只需使用DO[1-80]。
重新设置I/O地址后图中状态一栏显示PEN表明设置正确为可用状态,此时应重启控制器,激活设置。
状态栏显示ACTIV时为可用并已激活,UNASG为不可用。
至此PROFIBUS-DP通讯设置完成,可通过STEP7读取查看是否通讯成功。
控制器D-NET板的24V供电可从外部引入,也可从控制器内的24V接入。
另外焊机D-NET板还需给其他模块供电,如下图所示。
12345b)拨码i)机器人控制器D-NET板拨码拨码开关总共6位,各位置可选拨码情况如下表所示,本文采用的是地址81的拨码方式。
ii)焊机D-NET板拨码根据实际需要对下图拨码旋钮进行拨码,S520旋钮为个位,S521旋钮为十位,如图拨码地址为11。
2.软件设置1)同时按住前一页、后一页,并开机,进入3控制启动。
进入控制启动之后的画面如下:2)修改1 F编号,可任意命名。
基于发那科工业机器人DeviceNet的简单介绍

FANUC DeviceNet Interface,基于 Controller Area Network (CAN) BUS, 可以简单将产业用传动装置、传感器和 I/O 控制器之间连接起来。 DeviceNet Interface,由将 R-30iA 控制器连接到一个或多个 DeviceNet 网络 上的硬件和软件构成。 硬件由母板和最多4块子板构成。各子板提供有与 DeviceNet 网络之间 的通信功能。 作为选项功能的 DeviceNet Interface 软件,被安装到 R-30iA 控制器内。
DeviceNet 从控板 DeviceNet Interface 网络连接 将各板连接到带有5端子 Phoenix CombicoI/O,使用 81 到 84 的机架编号进行 I/O 分配。 硬件连接方框图
DeviceNet Interface 具有如下优点。 简化与 I/O 的连接,可以减少接口硬件。由此,可以简单地设置和维护 通信系统。 根据硬件配置,可以连接到最多 4 个 DeviceNet 网络上。
第一网络,用于在单元内连接主机和多个控制器,第二网络用于将 I/O 装置本地连接到各控制器上。 将第一网络作为成为低速波特率的总延长较长的网络来使用,将第二网络 作为可以使用高速波特率的总延长较短的网络来使用。 通过采用产业界标准的开放式网络协议,机器人可以与各类工业产品、简 单的光 电开关和接近开关到可编程逻辑控制器(PLC)广泛地进行信息交换。 DeviceNet Interface 可以与如下设备一起使用。 处理 I/O 板 I/O 单元 A 型
I/O 单元 B 型 程控 I/O 接口 以太网通信 Profibus DP ControlNet DeviceNet Interface 由下列硬件构成。 DeviceNet Interface 母板,用来连接 R-30iA 控制器的后面板连接器和 PC/104DeviceNet 子板的 PC/104 连接器。母板有两类。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Devicenet连接
简介:机器人做主站
万可现场总线适配器做远程终端
1,硬件:A full-slot motherboard
SST-DN3-104 daughterboard
万可device net现场适配器750-346,
数字输入模组750-402,数字输出模组750-531
终端模块750-600 。
24伏开关电源。
2,软件:机器人安装device net interface, device net slave(做主站可以不要)软件。
3,现场总线接法:
1,0V 黑色
2,24V 红色
3,CAN_H 白色
4,CAN_L 蓝色
5,DRAIN 灰色
现场总线适配器接法与机器人接法
一致
1,前六位二进制码,设置MC ID;
2,后两位二进制码,设置波特率,125k,
250k,500k
机器人MC ID和波特率在软件中设
置。
4,机器人TP设置:
1)配置和连接device net接口子板
Press MENUS.
Select I/O.
Press F1, [TYPE].
Select Device Net. (在子板上有PID拨码开关,设置第几块板)
2) press F4, DETAIL配置子板:
Board Detail
Board: 1 Status: OFFLINE
Scanner type: SST 5136-DN-104
Motherboard: Full-slot
1 MAC-ID: 0
2 Baud-rate: 125 KB
3 Board auto-restart: OFF
4 Input resume state (rack 81): LAST
Slave Operation:
Slave Status: OFFLINE
5 SLAVE Error Severity: WARN
6 Size of output from master: 0 bytes
7 Size of input to master: 0 bytes
press PRVE,EXIT;移动光标,press F4, ONLINE
3)在线搜寻网络设备,press NEXT
Press F3, DIAG.
(WAGO远程终端的MC ID为1;)
Press F4, QUERY.
If the query is successful,如下:
Device Net Device Info 1/8
Board: 1
Mac Id: 1
1 Baud-rate: 125 KB
2 Device name: 750-346
3 Vendor Id: 40
4 Device Type: 12
5 Product Code: 346
6 I/O Mode: POLL
7 Digital inputs: 24
8 Digital outputs: 16
9 Analog inputs: 0
10 Analog outputs: 2
11 COS/CYC Ack: YES
12 Analog First: NO
13 Input Data Offset (bytes): 0
4) 在用户定义列表中增加网络设备设置信息,
Press F3, ADD_DEF.
5)为机器人主站创建设备列表,press F3,DEV_LST
Device List Screen
6)机器人重新启动,机器人根据设备列表为远程设备自动分配I/O
7)移动光标使远程终端750-346 ON
Device List Screen
《英语学科知识与教学能力》(初级中学)
一、考试目标
1. 英语学科知识与能力
具有扎实的英语语言基础知识和语言能力;具备从事初中英语教学所需要的英语语言能力;能理解有关英语国家的语言、历史和文化等相关知识。
2.英语学科教学知识与能力
掌握基本的、适合初中英语教学的学科教学知识和英语课程标准知识,并能用以指导初中英语教学。
3.英语学科教学设计能力
能够根据英语学科特点,针对初中学生的认知特点、语言水平和学习需要选择并设计合理的教学内容,形成完整合理的教学方案。
4. 英语学科教学实施能力
理解初中英语课堂教学实施的基本原则和方法,具备实施语言课堂教学的基本能力;能够依据教学设计,根据教学实际情况,采用恰当的教学手段,引导学生进行有效学习。
5. 英语学科教学评价知识与能力
了解初中英语课堂教学评价的基本知识和方法,能够对学生的语言学习进行恰当的评价;了解教学反思的基本方法和策略,能够对自己的课堂教学实践进行反思,提出改进的思路。
二、考试模块内容与要求
(一) 语言知识与能力
1.掌握英语语言的基础知识,了解语言研究中与英语教学相关的基本概念和内容,并能在课堂教学中加以运用。
2.具有良好的英语语言运用能力,包括用英语进行书面表达、获取教学资源和信息、表达思想情感和与学生良好沟通的能力;能够筛选并改编适合初中学
生英语水平的教学材料。
3. 能在语篇中理解英语国家的语言、历史和文学等相关的社会文化知识。
(二)语言教学知识与能力
1.了解英语教学基本理论,包括语言观、语言学习观、语言教学观等对初中英语教学的指导作用。