实验四 霍尔式传感器的静态位移特性—直流激励
霍尔式传感器实验

霍尔式传感器实验实验目的1.了解霍尔式传感器的结构、工作原理。
2.了解霍尔式传感器在直流激励下的特性。
3.了解霍尔式传感器在交流激励下的特性。
4.通过实验了解霍尔式传感器在振动测量中的应用。
实验原理霍尔式传感器是由两个环形磁钢组成的梯度磁场和位于磁场中的霍尔元件组成,当霍尔元件通以恒定电流时,霍尔元件就有电势输出,霍尔元件在梯度磁场中上、下移动时,输出的霍尔电势V取决于其在磁场中的位移量X,所以测得霍尔电势的大小便可获知霍尔元件的静位移。
实验仪器CSY10B型传感器系统实验仪(直流稳压电源(±2V档)、电桥、霍尔式传感器、差动放大器、数字电压/频率表、螺旋测微仪、音频振荡器、移相器、相敏检波器、低通滤波器、振动圆盘)、砝码(20克/个)、示波器等。
实验内容与步骤一、霍尔式传感器的直流激励特性图(1)1.按图(1)接线,装上螺旋测微仪,调节振动圆盘上、下位移,使霍尔元件位于梯度磁场中间位置,差动放大器增益适度。
2.开启仪器电源,调节电桥“W D”电位器,使系统输出为零,上、下移动振动圆盘,使系统输出电压正负对称。
3.以系统输出为零作为起点,上、下移动测微头各3.5mm,每变化0.5mm读取相应的电压值。
并记入下表,作出V-X曲线,求出灵敏度及线性度。
1.直流激励电压须严格限定在2V,绝对不能任意加大,以免损坏霍尔元件。
二、霍尔式传感器的交流激励特性图(2)1.按图(2)接线组成测试系统,差动放大器增益适度,装上螺旋测微仪,调整霍尔元件至梯度磁场中间位置,音频振荡器从180°输出端输出,频率为1KHZ,幅度严格限定在Vρ-ρ值5V以下,以免损坏霍尔元件。
2.用示波器观察相敏检波器输出端③波形,调节“移相”旋钮,当振动圆盘在最上、最下位置时,使输出达最大值并正负对称,然后使霍尔元件位于磁场中间位置并调整电桥W D、W A电位器使系统输出为零。
3.旋动螺旋测微仪使霍尔元件上下位置移动,读出相应X——V值。
霍尔传感器的直流激励特性实验报告误差分析

霍尔传感器的直流激励特性实验报告误差分析
霍尔传感器是用来检测磁场的一种传感器,它可以通过感知磁场的变化来测量物体的位置、速度等。
在实验中,为了使霍尔传感器正常工作,需要给它提供一定的激励电压,这个激励电压的大小和稳定性对实验的准确性有很大的影响。
一般来说,霍尔传感器的直流激励特性实验可以分为两个部分:测量霍尔传感器的输出电压与激励电压的关系,以及测量霍尔传感器的稳定性。
其中,第一个部分是为了确定霍尔传感器的灵敏度,即输出电压与磁场的关系,第二个部分是为了确定霍尔传感器的长期稳定性。
误差分析:
1. 激励电压的稳定性不够:
在实验中,如果激励电压的波动比较大,就会导致输出电压的误差增大。
这种误差可以通过采用稳压电源或者其他控制电压波动的方法来减小。
2. 测量电路的误差:
测量电路也会对实验结果产生误差,如放大器的增益不稳定、滤波器的频率响应不均匀等。
可以通过对测量电路进行校准来减小误差。
3. 环境磁场的影响:
周围的磁场也会对实验结果产生误差,特别是在霍尔传感器接近物体时,物体本身的磁场会对测量产生影响。
可以采取屏蔽措施或者在实验中消除这些影响。
4. 对原始数据处理的误差:
在对实验数据进行处理时,可能会出现计算误差、单位转换误差等。
这些误差可以通过实验操作的规范、数据记录的精准和对数据处理的细心来减小。
综上所述,要减小霍尔传感器的直流激励特性实验的误差,需要在实验设计、实验操作、数据处理等方面都保证科学合理性和准确性,并且提高对实验中各种误差来源的识别和防范能力。
霍尔传感器位移特性实验报告
霍尔传感器位移特性实验报告霍尔传感器位移特性实验报告一、引言霍尔传感器是一种常用的非接触式位移传感器,广泛应用于工业自动化、汽车电子、航空航天等领域。
本实验旨在探究霍尔传感器的位移特性,通过实验数据的采集和分析,了解霍尔传感器在不同位移条件下的响应特点。
二、实验目的1. 理解霍尔传感器的工作原理;2. 掌握霍尔传感器的位移测量方法;3. 分析霍尔传感器在不同位移下的输出特性。
三、实验装置与方法1. 实验装置:- 霍尔传感器:将霍尔传感器固定在测量平台上,与位移装置相连;- 位移装置:通过手动旋钮控制位移装置的运动,使其产生不同的位移;- 数据采集系统:使用万用表或示波器对霍尔传感器的输出信号进行采集。
2. 实验方法:- 将霍尔传感器与位移装置连接后,将位移装置调整到初始位置;- 通过手动旋钮控制位移装置,逐步改变位移,记录下每个位移条件下的传感器输出信号;- 将采集到的数据进行整理和分析。
四、实验结果与分析在实验过程中,我们按照不同的位移条件,记录下了霍尔传感器的输出信号。
通过对数据的整理和分析,我们得到了以下结果:1. 位移与输出信号的关系:我们发现,随着位移的增加,霍尔传感器的输出信号呈线性增加的趋势。
这与霍尔传感器的工作原理相吻合,即霍尔传感器通过感应磁场的变化来测量位移。
2. 输出信号的稳定性:在一定范围内,霍尔传感器的输出信号相对稳定,变化较小。
然而,当位移超出一定范围时,输出信号的变化较大。
这可能是由于霍尔传感器的灵敏度有限,在较大位移下无法准确测量。
3. 温度对输出信号的影响:在实验过程中,我们还发现温度对霍尔传感器的输出信号有一定影响。
随着温度的升高,输出信号呈现出一定的波动。
这可能是由于温度变化引起霍尔传感器内部电路的参数变化,进而影响输出信号的稳定性。
五、实验总结通过本次实验,我们深入了解了霍尔传感器的位移特性。
我们发现霍尔传感器的输出信号与位移呈线性关系,在一定范围内相对稳定。
(整理)实验四 霍尔式传感器的静态位移特性—直流激励.

南昌大学实验报告学生姓名: 学 号: 专业班级: 实验类型:□ 验证 □ 综合 □ 设计 □ 创新 实验日期: 实验成绩:实验四 霍尔式传感器的静态位移特性—直流激励实验目的:了解霍尔式传感器的原理与特性。
所需单元及部件:霍尔片、磁路系统、电桥、差动放大器、V /F 表、直流稳压电源,测微头、振动平台。
有关旋钮的初始位置:差动放大器增益旋钮打到最小,电压表置2V 档,直流稳压电源置2V 档,主、副电源关闭。
实验步骤:(1)了解霍尔式传感器的结构及实验仪上的安装位置,熟悉实验面板上霍尔片的符号,霍尔片安装在实验仪的振动圃盘上,两个半圆永久磁钢固定在实验仪的顶板上,二者组合成霍尔式传感器。
(2)开启主、副电源将差动放大器调零后,增益置接近最小,使得霍尔片在磁场中位移时V /F 表读数明显变化,关闭主,副电源,根据图1接线,W 1、r 为电桥单元的直流电桥平衡网络。
(3)装好测微头,调节测微头与振动台吸合并使霍尔片置于半圆磁钢上下正中位置。
(4)开启主、副电源,调整W1使电压表指示为零。
图1 接线图(5)上下旋动测微头,记下电压表读数,建议每隔0.2mm读一个数,将读数填入下表:做出V—X曲线,指出线性范围,求出灵敏度,关闭主、副电源。
可见,本实验测出的实际上是磁场情况,它的线性越好,位移测量的线性度也越好,它的变化越陡,位移测量的灵敏度也越大。
(6)实验完毕,关闭主、副电源,各旋钮置初始位置。
注意事项:(1)由于磁路系统的气隙较大,应使霍尔片尽量靠近极靴,以提高灵敏度。
(2)一旦调整好后,测量过程中不能移动磁路系统。
(3)激励电压不能过大,以免损坏霍尔片。
(±4V就有可能损坏霍尔片)。
直流激励时霍尔式传感器的位移特性试验

3
实验实训要求
■必修□选修□其他
实验实训指导教师
朱良学
考核方法
实验数据的正确记录及实训报告
项目建立时间
2014年9月
实验实训教材或指导书
■有□无
教材或指导书名称及版本
传感器实训指导书
实验实训内容
简介
(目的、要求、
内容)
训练目的:
掌握霍尔式传感器测量位移的原理和方法
场地要求及安全要求:
1.保持干净干燥
酒泉职业技术学院实验实训项目卡
系(部)机电工程系实验实训室传感器技术实训室指导教师:朱良学№.6
实验实训项目名称
直流激励时霍尔式传感器的位移特性试验
性
质
□基础课
□专业基础课
■专业课
类
别
■验证性
□设计性
□综合性
实验(实训)时数
2
所属课程
信息检测与控制
同时实验(实训)组数
8
面向专业
电气自动化;电子信息;应用电子
2.正确接线
3.安全用电
教学组织及内容:
1.将霍尔传感器安装固定在静态支架上,并固定好测微头。
2.完成霍尔传感器以及实验模块的接线。
3.实验模块接入模块电源15V(从主控箱引入),检查无误后,开启电源,调节测微头使霍尔片在磁钢中间位置,再调节Rw1使电压表指示为零,若无法调零则交换放大器两端输入接线。
4.旋转测微头向轴向方向推进,每转动0.2mm记下一个读数,直到读数近似不变,将读数填入表。
主要实验
实训设备
名称
型号规格
数量
名称
型号规格
数量
霍尔传感器实验模块
8
测微头
霍尔传感器的直流激励报告示例

吉林大学
仪器科学与电气工程学院
本科生实验报告
实验项目:霍尔传感器的直流激励报告示例
学生姓名:
学号:
实验日期:
实验地址:
2010 年月日
一、实验目的
了解霍尔式传感器的原理与特性
二、实验所用仪器设备
霍尔片、磁路系统、电桥、差动放大器、F/V表、直流稳压电源、测微头、振动平台、主副电源
三、实验原理
根据霍尔效应,霍尔电势V H=K H IB,当霍尔元件处在梯度磁场中运动时,它就可以进行位移测量了。
四、实验步骤
(1)开启主副电源,将差动放大器调零,增益最小。
关闭电源,并连接电路图
(2)调节测微头与振动台吸合并使霍尔片至于半圆磁钢上下正中位置
(3)开启主副电源,调整W1使电压表指示为零
(4)上下旋动测微头,记录电压表读数,并填入表中
(5)关闭电源,整理器材
五、实验结果与分析
V—X曲线见下图
从曲线我们可以看出线性度是比较好的,其灵敏度为K=0.02v/0.100mm=0.2v/mm,关系式为V=KX-1.6022(V)
六、实验心得与建议
该实验通过测梯度磁场的情况,从而得到间接得到位移量。
这给我们自己设计传感器提供了一个很好的思路,我们可以通过设置一个容易控制和测量的物理量,使其按一定规律在所测的物理量上分布,从而我们可以通过测量容易测得的物理量来间接得到我们需要测的量,不仅测量方便而且比较准确。
实验十二霍尔式传感器的应用(一)直流激励特性测试一、实验目的...
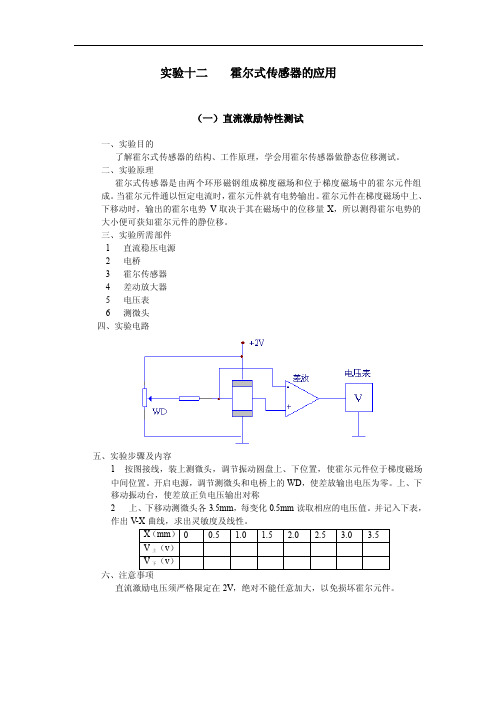
实验十二霍尔式传感器的应用(一)直流激励特性测试一、实验目的了解霍尔式传感器的结构、工作原理,学会用霍尔传感器做静态位移测试。
二、实验原理霍尔式传感器是由两个环形磁钢组成梯度磁场和位于梯度磁场中的霍尔元件组成。
当霍尔元件通以恒定电流时,霍尔元件就有电势输出。
霍尔元件在梯度磁场中上、下移动时,输出的霍尔电势V取决于其在磁场中的位移量X,所以测得霍尔电势的大小便可获知霍尔元件的静位移。
三、实验所需部件1直流稳压电源2电桥3霍尔传感器4差动放大器5电压表6测微头四、实验电路五、实验步骤及内容1 按图接线,装上测微头,调节振动圆盘上、下位置,使霍尔元件位于梯度磁场中间位置。
开启电源,调节测微头和电桥上的WD,使差放输出电压为零。
上、下移动振动台,使差放正负电压输出对称2 上、下移动测微头各3.5mm,每变化0.5mm读取相应的电压值。
并记入下表,作出V-X曲线,求出灵敏度及线性。
六、注意事项直流激励电压须严格限定在2V,绝对不能任意加大,以免损坏霍尔元件。
(二)霍尔传感器的应用——振幅测量和电子秤一、实验目的1 通过本实验了解霍尔传感器在振动测量中的作用。
2 说明线性霍尔传感器的实际应用。
二、实验所需部件1霍尔传感器2电桥3差动放大器4低通滤波器5直流稳压电源6示波器7电压表8砝码9振动圆盘三、实验步骤及内容(一)振幅测量1按上面的实验二十所示的电路连线,调节系统,使其输出为零。
2将低频振荡器接“激振I”,保持适当的振幅,用示波器观察差动放大器输出波形。
3进一步提高低频振荡器的振幅,用示波器观察差放输出波形,当波形出现顶部削顶时,说明霍尔元件已进入均匀磁场,霍尔电压已不再随振动的增加而线性增加。
(二)电子秤1 在上面电路不变的基础上,调节系统使输出电压为零,系统灵敏度尽量大。
2 以振动圆盘作为称重平台,逐步放上砝码,依次记下表头读数,填入下表,并做出V-W曲线。
线中求得其重量。
四、注意事项1 霍尔传感器在做称重时只能工作在梯度磁场中,所以砝码和被称重物都不应太重。
霍尔传感器电容传感器4实验数据+图形
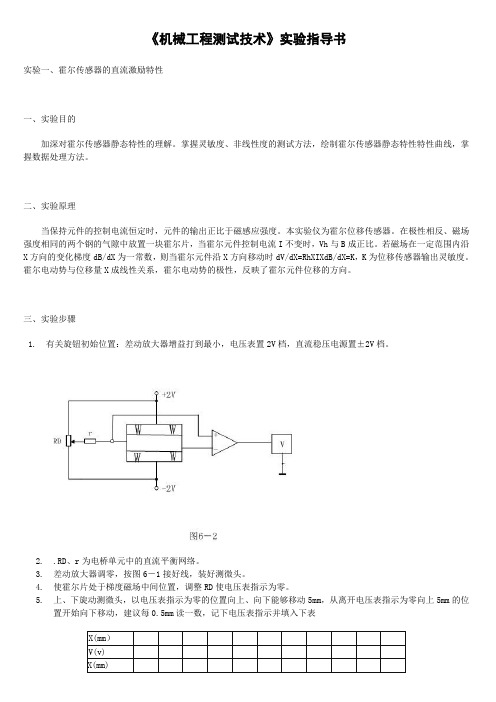
《机械工程测试技术》实验指导书实验一、霍尔传感器的直流激励特性一、实验目的加深对霍尔传感器静态特性的理解。
掌握灵敏度、非线性度的测试方法,绘制霍尔传感器静态特性特性曲线,掌握数据处理方法。
二、实验原理当保持元件的控制电流恒定时,元件的输出正比于磁感应强度。
本实验仪为霍尔位移传感器。
在极性相反、磁场强度相同的两个钢的气隙中放置一块霍尔片,当霍尔元件控制电流I不变时,Vh与B成正比。
若磁场在一定范围内沿X方向的变化梯度dB/dX为一常数,则当霍尔元件沿X方向移动时dV/dX=RhXIXdB/dX=K,K为位移传感器输出灵敏度。
霍尔电动势与位移量X成线性关系,霍尔电动势的极性,反映了霍尔元件位移的方向。
三、实验步骤1.有关旋钮初始位置:差动放大器增益打到最小,电压表置2V档,直流稳压电源置±2V档。
2..RD、r为电桥单元中的直流平衡网络。
3.差动放大器调零,按图6-1接好线,装好测微头。
4.使霍尔片处于梯度磁场中间位置,调整RD使电压表指示为零。
5.上、下旋动测微头,以电压表指示为零的位置向上、向下能够移动5mm,从离开电压表指示为零向上5mm的位置开始向下移动,建议每0.5mm读一数,记下电压表指示并填入下表X(mm)V(v)X(mm)V(v)6.用以上的位移和输出电压数据,绘出霍尔传感器静态特性的位移和输出电压特性V-X曲线, 指出线性范围。
7.将位移和输出电压数据分成两组,用“点系中心法”对数据进行处理,并计算两点联线的斜率,即得到灵敏度值。
实验可见:本实验测出的实际是磁场的分布情况,它的线性越好,位移测量的线性度也越好,它们的变化越陡,位移测量的灵敏度也就越大。
四、思考题1.为什么霍尔元件位于磁钢中间位置时,霍尔电动势为0。
2.在直流激励中当位移量较大时,差动放大器的输出波形如何?实验二、电容传感器的直流特性实验内容:加深对电容传感器静态特性的理解。
掌握灵敏度、非线性度的测试方法,绘制电容传感器静态特性曲线,掌握数据处理方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
南昌大学实验报告
学生姓名: 学 号: 专业班级: 实验类型:□ 验证 □ 综合 □ 设计 □ 创新 实验日期: 实验成绩:
实验四 霍尔式传感器的静态位移特性—直流激励
实验目的:了解霍尔式传感器的原理与特性。
所需单元及部件:霍尔片、磁路系统、电桥、差动放大器、V /F 表、直流稳压电源,测微头、振动平台。
有关旋钮的初始位置:差动放大器增益旋钮打到最小,电压表置2V 档,直流稳压电源置2V 档,主、副电源关闭。
实验步骤:
(1)了解霍尔式传感器的结构及实验仪上的安装位置,熟悉实验面板上霍尔片的符号,霍尔片安装在实验仪的振动圃盘上,两个半圆永久磁钢固定在实验仪的顶板上,二者组合成霍尔式传感器。
(2)开启主、副电源将差动放大器调零后,增益置接近最小,使得霍尔片在磁场中位移时V /F 表读数明显变化,关闭主,副电源,根据图1接线,W 1、r 为电桥单元的直流电桥平衡网络。
(3)装好测微头,调节测微头与振动台吸合并使霍尔片置于半圆磁钢上下正中位置。
(4)开启主、副电源,调整W1使电压表指示为零。
(5)上下旋动测微头,记下电压表读数,建议每隔0.2mm 读一个数,将读数填入下
表:
图1 接线图
做出V—X曲线,指出线性范围,求出灵敏度,关闭主、副电源。
可见,本实验测出的实际上是磁场情况,它的线性越好,位移测量的线性度也越好,它的变化越陡,位移测量的灵敏度也越大。
(6)实验完毕,关闭主、副电源,各旋钮置初始位置。
注意事项:
(1)由于磁路系统的气隙较大,应使霍尔片尽量靠近极靴,以提高灵敏度。
(2)一旦调整好后,测量过程中不能移动磁路系统。
(3)激励电压不能过大,以免损坏霍尔片。
(±4V就有可能损坏霍尔片)。