基于Simulink的汽车稳定控制系统仿真研究_程旭峰
线性二自由度汽车操纵稳定性Simulink仿真
线性二自由度汽车操纵稳定性Simulink 仿真汽车的操纵稳定性是指在驾驶者不感到过分紧张、疲劳的情况下,汽车能够遵循驾驶者通过转向系统及转向车轮给定的方向行驶,且遇到外界干扰时,汽车能够抵抗干扰而保持稳定行驶的能力,汽车的操纵稳定性是汽车主动安全性的重要评价指标之一。
操纵稳定性包括:汽车在转向盘输入或外界干扰输入下的侧向运动响应随时间而变化的特性称为时域响应特性;转向盘输入有角位移输入和力矩输入;外界干扰输入主要指侧向风和路面不平产生的侧向力。
1. 转向盘角阶跃输入下的响应稳态响应,评价参量为 横摆角度速度增益—转向灵敏度瞬态响应,评价参量为 反应时间;横摆角速度波动的无阻尼园频率。
2. 横摆角速度频率响应特性转向盘转角正弦输入下,频率由0至∞变化时,汽车横摆角速度与转向盘转角的振幅比及相位差的变化规律。
评价参量为:共振峰频率;共振时的振幅比;相位滞后角;稳态增益。
3. 转向盘中间位置操纵稳定性转向盘小转角、低频正弦输入下,汽车高速行驶时的操纵稳定性。
评价参量为:转向灵敏度、转向盘力特性、转向功灵敏度。
4. 回正性转向盘力输入下的时域响应。
评价参量为:回正后剩余横摆角速度与剩余横摆角;达到剩余横摆角速度的时间。
轮胎的侧偏特性为:αk F Y =,k 为侧偏刚度,Y F 一定时,侧偏角越小越好,因此k 越大越好;前轮侧偏角在4度内时,轮胎侧偏特性呈线性变化。
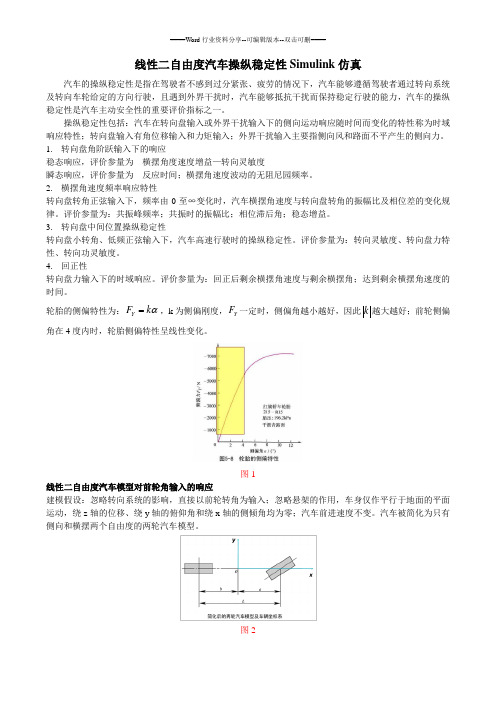
图1线性二自由度汽车模型对前轮角输入的响应建模假设:忽略转向系统的影响,直接以前轮转角为输入;忽略悬架的作用,车身仅作平行于地面的平面运动,绕z 轴的位移、绕y 轴的俯仰角和绕x 轴的侧倾角均为零;汽车前进速度不变。
汽车被简化为只有侧向和横摆两个自由度的两轮汽车模型。
图2假定汽车g y 4.0≤α(质心加速度在y 轴的投影),轮胎侧偏特性处于线性范围内,不计地面切向力Fx 、外倾侧向力Fy γ、回正力矩Tz 、垂直载荷的变化对轮胎侧偏刚度的影响;简化后的两轮汽车模型及车辆坐标系如下:图3确定汽车质心加速度(绝对加速度)在车辆坐标系的分量x α和y α,图4沿OX 轴速度分量的变化为:()()θθθθθθ∆∆-∆--∆∆+∆=∆∆+--∆∆+sin sin cos cos sin cos v v u u u v v u u u考虑θ∆很小,忽略二阶微量,则有: θθθθθ∆-∆=∆∆-∆--∆∆+∆v u v v u u u sin sin cos cos 上式除t ∆,取极限得r x v u dtd v dt du a ωθ-=-=同理可得r y u va ω+=二自由度汽车运动力学分析2121cos cos Y Y Z Y Y Y bF aF M FF F -=+=∑∑δδ 考虑δ较小,1cos =δ111αk F Y =,222αk F Y =则有:22112211ααααbk ak M k k F Z Y -=+=∑∑ 质心侧偏角u v =β ua u a v r r ωβωξ+=+= ()δωβξδα-+=--=ua r 1 ub u b v r r ωβωα-=-=2⎪⎭⎫ ⎝⎛-+⎪⎭⎫ ⎝⎛-+=∑u b k u a k F rr Y ωβδωβ21 ⎪⎭⎫ ⎝⎛--⎪⎭⎫ ⎝⎛-+=∑u b bk u a ak M r r Z ωβδωβ21 由于y Y ma F =∑,r Z Z I M ω=∑ ()r rr u v m u b k u a k ωωβδωβ+=⎪⎭⎫ ⎝⎛-+⎪⎭⎫ ⎝⎛-+ 21 r Z r r I u b bk u a ak ωωβδωβ =⎪⎭⎫ ⎝⎛--⎪⎭⎫ ⎝⎛-+21 即()()()r r u v m k bk ak uk k ωδωβ+=--++ 121211 ()()r Z r I ak k b k a ubk ak ωδωβ =-++-12212211 动力学方程可变形为δβωωZZ r Z r I ak I bk ak u I k b k a 1212212--++=δβωβmu k mu k k mu bk ak r 1212211-++⎪⎭⎫ ⎝⎛--= 即状态空间为δβωβω⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡211122211211b b a a a a r r δβωβω⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡001001r r 其中uI k b k a a Z 221211+=,Z I bk ak a 2112-=,Z I ak b 111-= 122121--=mu bk ak a ,mu k k a 2122+=,muk b 121-=仿真参数设置:仿真时间1.5s 汽车总质量 m= 绕z 轴转动惯量I Z =3885Kgm 2轴距L= 质心至前轴距离a= 质心至后轴距离b=前轮总侧偏刚度k 1=-62618N/rad 后轮总侧偏刚度k 2=-110185N/rad仿真模型为:仿真工况1:前轮转角1度,车速80Km/h 下,仿真结果为:仿真工况2:车速80Km/h 下,前轮转角分别为1度、2度和3度,仿真模型为:由上图可见,在车速为80km/h下,随前轮转角的增大,汽车质心侧偏角明显增大且开始出现振荡,固有圆频率及阻尼比减小,超调量及稳定时间增加,因此应避免在高速行驶时急转方向盘产生大的前轮转角。
基于MatlabSimulink的控制系统设计与仿真
基于MatlabSimulink的控制系统设计与仿真控制系统设计与仿真是现代工程领域中至关重要的一部分,它涉及到对系统的建模、控制器设计以及性能评估等方面。
MatlabSimulink作为一款强大的工程仿真软件,在控制系统设计与仿真中扮演着重要的角色。
本文将介绍基于MatlabSimulink的控制系统设计与仿真的基本原理、方法和应用。
1. 控制系统设计基础在开始介绍基于MatlabSimulink的控制系统设计与仿真之前,我们首先需要了解控制系统设计的基础知识。
控制系统通常由被控对象、传感器、执行器和控制器等组成。
其中,被控对象是需要被调节或控制的物理系统,传感器用于采集被控对象的状态信息,执行器则根据控制器输出的信号对被控对象进行调节,而控制器则根据传感器采集的信息和设定的目标来生成控制信号。
2. MatlabSimulink简介MatlabSimulink是MathWorks公司推出的一款用于数学建模、仿真和算法开发的工具。
它提供了丰富的模块库和直观的图形化界面,使工程师能够快速地建立模型、进行仿真并进行实时分析。
在控制系统设计领域,MatlabSimulink可以帮助工程师快速搭建控制系统模型,并进行性能评估。
3. 控制系统建模与仿真在MatlabSimulink中,可以通过拖拽不同的模块来建立控制系统模型。
常见的模块包括传感器、执行器、PID控制器等。
通过连接这些模块,并设置相应的参数,可以构建一个完整的控制系统模型。
一旦建立好模型,就可以进行仿真分析了。
MatlabSimulink提供了丰富的仿真工具,可以对系统进行时域分析、频域分析等。
4. 控制器设计与调试在控制系统设计中,控制器设计是至关重要的一环。
MatlabSimulink提供了各种常见的控制器设计方法,如PID控制器、状态空间反馈等。
工程师可以根据系统需求选择合适的控制器,并通过仿真来验证其性能。
此外,在调试阶段,MatlabSimulink还提供了丰富的调试工具,如信号监视器、作用力显示等,帮助工程师快速发现问题并进行调整。
基于simulink的线性二自由度汽车模型稳态响应
基于simulink的线性二自由度汽车模型稳态响应1.项目背景进行控制器的设计以及验证控制器是否正确的必要前提在于建立一个正确且可靠的整车数学模型。
如果能够建立同实际车辆更加接近的整车虚拟样机模型就能更好的反映车辆响应特性以及控制效果。
因此本实验将会在一定的假设条件之下,基于汽车理论以及牛顿力学在MATLAB/Simulink的环境下将整车动力学数学模型建立出来,在此基础上求前轮角输入下的响应曲线。
2.二自由度车辆模型如果要准确的对车辆的动力学状态进行描述,则需要知道车辆的上百个参数,譬如轮胎半径、前后轮的侧偏刚度等,但这当中有许多的参数是不变的,而有些却在车辆的行驶过程中会不断地发生变化,我们难以知道所有的参数的精确值,有些参数甚至于是不可以被测得的。
而且,车辆的动力学状态也受到外部的行驶环境的影响,譬如汽车和空气的相对运动所产生的空气阻力、地面坡度所产生的道路的阻力等都会对汽车的状态有明显的影响,然而这些力的大小方向都会实时发生变化,就算根据相关的经验公式也只能得到它们的估计值,不容易被直接地测出。
除此之外,汽车的许多参数相互之间都存在耦合关系,某一个参数的改变也可能会导致其它的参数改变,譬如汽车横向速度以及纵向速度间的耦合关系、非线性的轮胎横向力和纵向力间的耦合关系。
有的参数之间的耦合关系并不能够用准确的数学公式来表达,这会使得所创建的数学模型的精度受到严重的影响。
显而易见,如果要建立一个能精确地描述汽车的运动状态的车辆数学模型很明显是不太可能的。
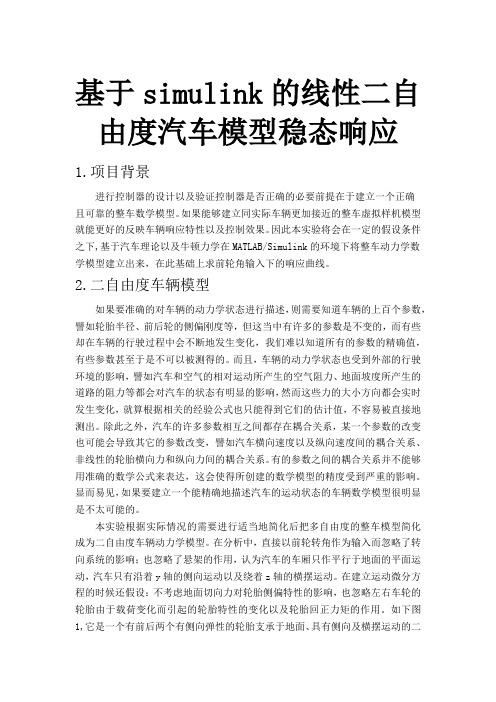
本实验根据实际情况的需要进行适当地简化后把多自由度的整车模型简化成为二自由度车辆动力学模型。
在分析中,直接以前轮转角作为输入而忽略了转向系统的影响;也忽略了悬架的作用,认为汽车的车厢只作平行于地面的平面运动,汽车只有沿着y轴的侧向运动以及绕着z轴的横摆运动。
在建立运动微分方程的时候还假设:不考虑地面切向力对轮胎侧偏特性的影响,也忽略左右车轮的轮胎由于载荷变化而引起的轮胎特性的变化以及轮胎回正力矩的作用。
基于simulink的车辆行驶控制系统建模与仿真

基于simulink的车辆行驶控制系统建模与仿真基于Simulink的车辆行驶控制系统建模与仿真汽车行驶控制系统是应用非常广泛的控制系统之一,其主要的目的是对汽车的速度进行合理的控制。
系统的工作原理如下:经过速度操纵机构的位置发生改变以设置汽车的速度,再测量汽车当前的速度,并求取它与指定速度的差值,最后由速度差值信号驱动汽车产生相应的牵引力,并由此牵引力改变汽车的速度直到其速度稳定在指定的速度为止。
本文采用Simulink建模,对行驶控制系统进行仿真,并采用Simulink自带的signal constraint模块对PID参数进行优化,仿真结果表明,该系统能在短时间内平稳的达到指定的速度,提高了汽车的操纵性。
1.汽车行驶控制系统的物理模型与数学描述1)速度操纵机构的位置变换器位置变换器是汽车行驶控制系统的输入部分,其目的是将速度操纵机构的位置转换为相应的速度,二者之间的数学关系如下所示:其中x速度操纵机构的位置,v为与之相应的速度。
2)离散行驶控制器行驶控制器是整个汽车行驶控制系统的核心部分。
简单来说,其功能是根据汽车当前的速度与指定速度的差值,产生相应的牵引力。
行驶控制器为一典型的PID控制器,其数学描述为:积分环节:微分环节:系统输出:其中u(n)为系统的输入,相当于汽车当前速度与指定速度的差值。
y(n)为系统输出,相当于汽车牵引力,x(n)为系统的状态。
Kp,Ki,Kd为PID控制器的比例、积分与微分控制参数。
3)汽车动力机构汽车动力机构是行驶控制系统的执行机构。
其功能是在牵引力的作用下改变汽车的速度,使其达到指定的速度。
牵引力与速度之间的关系为:其中v为汽车的速度,F为汽车的牵引力,m=1000kg为汽车的质量,b=20为阻力因子。
2.系统Simulink模型与参数设置行驶控制系统仿真模型如图1所示:图1 行驶控制系统仿真模型Set speed子系统模型如图2所示:图2 Set speed子系统模型Discrete cruise controller子系统模型如图3所示:图3 Discrete cruise controller子系统模型Car dynamics子系统模型如图4所示:图4 Car dynamics子系统模型我们预设Kp=1,Ki=0.01,Kd=0.3.系统仿真与分析当Kp=1,Ki=0.01,Kd=0时仿真结果如图5所示:图5 预设参数的仿真速度曲线这时我们运行signal constraint模块对PID参数进行优化,优化结果如图6所示:图6 优化后仿真速度曲线优化后的Kd=-5.64×10-4,Ki=0.0089,Kp=10.我们把仿真数据输出到Workspace,程序和对比图如下:>>plot(ScopeData(:,1),ScopeData(:,2),'LineWidth',1.5);>>hold on;>>plot(ScopeData1(:,1),ScopeData1(:,2),'r:','LineWidth',1.5); >>hold off;>>grid;图6经过对比能够发现优化后的参数能够更好的使汽车在较短的时间内平稳的达到指定的速度。
基于Simulink的控制系统建模与仿真

第27页/共36页
滑艇速度控制系统模型框图
第28页/共36页
然后设置正确的系统模型参数与仿真参数对此 系统进行仿真,其中Step的Final Value值设置为1000 (即滑艇牵引力)、子系统中增益模块Gain的取值 为1/1000(即1/m)、Fcn模块的expression设置为 u^2-u(求取水的阻力)、系统仿真时间为0至100s。
0.02s。 (2)P、I、D增益模块:取值分别为1、0.01、0。
第15页/共36页
汽车动力机构参数:
(1)Gain模块:取值为1/m,即1/1000。 (2)Gain1模块:取值为b/m,即20/1000。 (3)Integrator模块:初始状态为0,即速度初值为0。 系统仿真参数:
(1)仿真时间范围:从0至1000s。 (2)求解器:使用变步长连续求解器。 4.系统仿真与分析
建模: 根据牛顿第二定律,小车受弹簧的弹性力、
阻尼器的阻尼力、加速度力,运动方程如下:
mx fx kx F x 0.2x 0.4x 0.2F u(t) 0.2F x u(t) 0.2x 0.4x
例exm1。
第1页/共36页
例2 蹦极跳系统 蹦极跳是一种挑战身体极限的运动,蹦极者系
着一根弹力绳从高处的桥梁或山崖等向下跳。在下 落的过程中,蹦极着几乎处于失重状态。应用 Simulink对蹦极跳系统进行仿真研究。
积分环节: x(n) x(n 1) u(n) 微分环节:d(n) u(n) u(n 1) 系统输出: y(n) Pu(n) Ix(n) Dd(n)
第10页/共36页
汽车动力机构 汽车动力机构是行驶控制系统的执行机构。其
基于CarSimRT的车辆稳定性系统控制器开发

件 进 行 验 证 和 评 估 , 具 有 开 发 周 期 短 、效 率 高 和 成 本低等优点。
3 控制器设计
3.1 控制器硬件设计 选择 Infenion 16 位单片机 XC164CS 作为控制
器 CPU[8], 辅以相应的外围电路。控制器电路原理如 图 4 所示。在控制器硬件设计过程中, 充分考虑到 贴近实际系统的原则, 均采用与实际车辆传感器相 对应的接口。
- 基金项目: 国家 863 计划( 2006AA1103103) 和吉林大学“985 工程”汽车工程创新平台。 2008 年 第 3 期
—1—
·设计·计算·研究·
型, 大大缩短了开发周期。选用 CarSim 车辆模型库
中的某前轮驱动前轮转向轿车模型( 模型参数列于
表 1) , 模 型 包 括 悬 架 系 统 、动 力 传 动 系 统 、制 动 系
看门狗电源模块
调 试 接 口 JTAG
基于Simulink的车辆两自由度操纵稳定性模型

基于Simulink的车辆两自由度操纵稳定性模型汽车操纵稳定性是汽车高速安全行驶的生命线,是汽车主动安全性的重要因素之一;汽车操纵稳定性一直汽车整车性能研究领域的重要课题。
本文采用MATLAB仿真建立了汽车二自由度动力学模型,通过仿真分析了不同车速、不同质量和不同侧偏刚度对汽车操纵稳定性的影响。
研究表明,降低汽车行驶速度,增加前后轮侧偏刚度和减小汽车质量可以减小质心侧偏角,使固有圆频率增加降低行驶车速还可以使阻尼比增加,超调量及稳定时间减少。
车辆操纵稳定性评价主要有客观评价和主观评价俩种方法。
客观评价是通过标准实验得到汽车状态量,再计算汽车操纵稳定性的评价指标,这可通过实车实验和模拟仿真完成,在车辆开发初期可通过车辆动力仿真进行车辆操纵稳定性研究。
1.二自由度汽车模型为了便于掌握操纵稳定性的基本特性,对汽车简化为线性二自由度的汽车模型,忽略转向系统的影响,直接一前轮转角作为输入;忽略悬架的作用,认为汽车车厢只作用于地面的平面运动。
2.运动学分析分析时,令车辆坐标系原点与汽车质心重合。
首先确定汽车质心的(绝对)加速度在车辆坐标系中的分量。
确定汽车质心的(绝对)加速度在车辆坐标系的分量 和 。
Ox 与Oy 为车辆坐标系的纵轴与横轴。
质心速度 1与t 时刻在Ox 轴上的分量为u ,在Oy 轴上的分量为v 。
2.1 沿Ox 轴速度分量的变化为:由于汽车转向行驶时伴有平移和转动,在t+△t 时刻,车辆坐标系中质心速度的大小与方向均发生变化,而车辆坐标系中的纵轴和横轴亦发生变化,所以沿x 轴速度分量变化为:()cos ()sin cos cos sin sin u u u v v u u u v v θθθθθθ+∆∆--+∆∆=∆+∆∆---∆∆考虑到Δθ很小并忽略二阶微量,上式变成:Δu-v Δθ,除以Δt 并取极限,便是汽车质心绝对加速度在车辆坐标系Ox 和Oy 上的分量为:2.2 二自由度动力学方程因此我们可以得出两自由度的基本操纵模型的运动方程:由于假设侧片刚度在线性区域,所以F y = -K αα(公式2) 在单轨模型中,前轮的侧向速度为v f =v+ar后轮的侧向速度为v r =v-br当α很小的时候,可以认为tan α≈α 所以:() 1 r yf yrz r yf yrm v uw F F I w aF bF +=+⎧⎪⎨=-⎪⎩(公式) 3r r r f u bw u u aw u ααδ-⎧≈⎪⎪⎨+⎪≈-⎪⎩(公式)12121221212112()()()()()r rZ r r k k ak bk m v uw k v w u u ak bk a k b k I w ak v w u u k δδ+-⎧+=--⎪⎪⎨-+⎪=--⎪⎩其中k 为前轮侧偏刚度为后轮侧偏刚度将转向输入δ作为系统的输入放在方程右边,并以状态空间方程的形式来表示,则可得到系统的运动方程为:2.3 转化成标准的状态空间方程转化为标准的状态空间方程为:()121212211212()()00()()z r r k k ak bk mu u um v v k I w w ak ak bk a k b k u u δ+-⎛⎫+ ⎪⎛⎫⎛⎫⎛⎫⎛⎫⎪+= ⎪⎪ ⎪ ⎪⎪-+⎝⎭⎝⎭⎝⎭⎝⎭⎪⎝⎭11;;;r X AX BUv A P Q B P R X U w δ--=+⎛⎫=-=== ⎪⎝⎭其中输入矢量为()121222121211;()()()()010r z z z X AX BUY CX DU v X U w k k ak bk u mu muA ak bk a k b k I u I u k mBCD ak I δ=+=+⎛⎫== ⎪⎝⎭+-⎛⎫-+ ⎪⎪= ⎪-+ ⎪⎝⎭⎛⎫- ⎪⎪=== ⎪- ⎪⎝⎭其中M文件定义的参数值Simulink模型二自由度汽车Simulink模型横摆角速度阶跃响应2.4以状态方程建立的仿真图A=-inv(p)*QB=inv(p)*RC=[0 1];D=[0];得到的仿真结果如上图的阶跃响应结果一样,不再给出。
基于Simulink的汽车稳定控制系统仿真研究

( D S C ) 等.
为 了清 晰 的显 示 汽车稳 定 控制 系统 的工 作过
程, 把控制过程分 成信息采集模块 、 数 值 估 算 模 块、 2自由度 汽 车模 型 模 块 、 稳定性 判断模块 、 控 制 器模 块和 执行 机构 模块 这 6 个模块 , 见图 1 . 信
息 采集 模块 采集 轮速 、 实 际横摆 角 期
2 0 1 4年 O 2月
武汉 理工 大学 学报 ( 交通 科学 与工 程版 )
J o u r n a l o f Wu h a n Un i v e r s i t y o f Te c h n o l o g y
( Tr a n s p o r t a t i o n S c i e n c e& E n g i n e e r i n g )
0 引
言
效果; ( 4 )执行手 段 的 问题 , 当获 知 汽 车失 稳 时通 过 什 么样 的操作 来使 汽车恢 复 稳定 状态 . 为 解决 上述 关 键 问题 , 研究一种以模糊 P I D 和神经 网络 控制 器 为 控 制 算 法 , 以横 摆 角 速 度 和 质 心侧 偏角 为 控制 变 量 , 以 汽车 车 轮 的差 动 制 动 为控 制 手 段 的 汽 车 稳 定 控 制 系 统 , 并 用 MAT— L AB / S i mu l i n k软件进 行 了仿 真研究 .
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关 键 词 :汽 车 稳 定 性 ;主 动 安 全 ;模 糊 控 制 ;神 经 网 络
中 图 法 分 类 号 :U46
doi:10.3963/j.issn.2095-3844.2014.01.048
0 引 言
汽车稳定 控 制 系 统 是 一 种 汽 车 主 动 安 全 装 置,主要用于解决 汽 车 行 驶 过 程 中 的 稳 定 性 和 轨 迹 保 持 的 问 题 .当 汽 车 由 于 某 些 因 素 而 出 现 甩 尾 、 侧滑、转 弯 过 度、转 弯 不 足 等 非 稳 定 状 况 时,驾 驶 员可能无 法 单 纯 依 靠 转 向 调 节 来 维 持 汽 车 稳 定 性,此时需要汽车 稳 定 控 制 系 统 帮 助 保 持 汽 车 的 稳定性.目前汽车 稳 定 性 控 制 系 统 受 到 各 大 汽 车 公司 的 重 视,博 世 公 司 研 制 了 电 子 稳 定 程 序 (ESP),这 是 世 界 上 第 一 款 汽 车 稳 定 控 制 系 统 .此 外其他公司研制 了 数 种 相 同 或 相 近 的 产 品:丰 田 的车辆稳定 控 制 系 统 (VSC)、本 田 的 车 辆 稳 定 性 控制 系 统 (VSA);宝 马 的 动 态 稳 定 控 制 系 统 (DSC)等 .
效 果 ;(4)执 行 手 段 的 问 题 ,当 获 知 汽 车 失 稳 时 通 过什么样的操作来使汽车恢复稳定状态.
为解决上述 关 键 问 题,研 究 一 种 以 模 糊 PID 和神经网络控制 器 为 控 制 算 法,以 横 摆 角 速 度 和 质心侧偏角为控 制 变 量,以 汽 车 车 轮 的 差 动 制 动 为控制 手 段 的 汽 车 稳 定 控 制 系 统,并 用 MAT- LAB/Simulink 软 件 进 行 了 仿 真 研 究 .
Fx =σσxD1sin{C1arctan [B1λ-烌
E1(B1λ-arctan B1λ)]}
Fy
=
σσyD2sin{C2arctan
烍 [B2x-
(12)
E2(B2x-arctan B2x)]} 烎
式中:σx =-λ/(1+λ);σy =-tanα/(1+λ);σ=
(σx2+σy2)0.5;曲 线 形 状 因 子 C1 = 1.65,C2 =
汽车稳定性控制系统是一种非线性的控制系 统 ,需 要 使 用 现 代 控 制 理 论 的 方 法 设 计 和 分 析 .汽 车稳定性控制 需 要 解 决 的 主 要 问 题 有:(1)汽 车 状态的检测,即通 过 测 量 哪 些 状 态 量 来 准 确 的 获 知 汽 车 的 行 驶 状 态 ;(2)汽 车 稳 定 的 判 定 ,使 用 什 么样的手段或 方 法 来 判 定 汽 车 的 失 稳;(3)汽 车 控 制 器 的 设 计 ,由 于 汽 车 是 一 个 非 线 性 系 统 ,因 此 选用 经 典 的 PID 控 制 器 将 无 法 获 得 理 想 的 控 制
图 3 7 自 由 度 汽 车 模 型
根据7 自 由 度 汽 车 模 型 可 以 建 立 汽 车 的 纵 向 、横 向 、横 摆 、以 及 4 个 车 轮 的 力 矩 平 衡 方 程 .根 据这些方程可以建立起7自由度的汽车非线性模 型[8]. 2.3 轮 胎 模 型 的 建 立
轮胎 模 型 采 用 H.B.Pacejka 建 立 的 魔 术 公 式 模 型 .忽 略 回 正 力 矩 的 影 响 ,只 考 虑 轮 胎 纵 向 力 和侧向力.建立制 动 转 弯 联 合 工 况 下 纵 向 力 和 侧 向力魔术公式
3 控制算法的设计
3.1 模糊 PID 控制器的设计[10-11] 设计2个 模 糊 PID 控 制 器 分 别 对 横 摆 角 速
度和质心侧偏角 进 行 控 制 得 出 中 间 输 出 量,然 后 综合2个中间量 计 算 出 制 动 压 力.由 于 2 个 模 糊 PID 控制器结构 和 模 糊 逻 辑 完 全 相 同,因 此 只 需 要设计1个模糊 PID 控制器.模糊 PID 控制器初 值的设定根据经 验 选 取;模 糊 控 制 器 使 用 二 维 模 糊控制器,输出为 Kp,Ki,Kd 的调节量,模糊 PID 控 制 器 的 工 作 原 理 见 图 5.
量 .当 前 对 汽 车 稳 定 调 节 的 方 法 中 ,差 动 制 动 法 是
最有效的控制方 法.该 方 式 可 以 同 时 实 现 对 横 摆
角速度和质心侧 偏 角 的 调 节,因 此 选 用 差 动 制 动
法作为稳定调节方法.
实 际 质 心 侧 偏 角 需 要 用 式 (1)估 算 ,参 考 横 摆
角速度ωr0 和参考质心侧偏角βo 由车速ux 和前轮 转角δ 通 过 2 自 由 度 的 汽 车 参 考 模 型 计 算 得 出 . [3]
( ) ·
β = arctan
ay ux
-ωr
(1)
式中:ay 为横向加速度;ux 为车速,可 以 通 过 最 大
轮速法确定.
由横摆角速 度 ωr 和 质 心 侧 偏 角β 的 偏 差 值 来判断汽车的稳 定 状 态、完 成 制 动 力 分 配 和 计 算
[-1,1]. 根据 PID 控 制 器 的 参 数 调 节 原 则 设 计 的 模
糊 规 则 见 表 3~5. 表3 ΔKp 律模糊规则表
δ
Δω
制动车轮
>0
>0
右前轮
>0
<0
左后轮
<0
>0
左前轮
<0
<0
右后轮
2.1 2 自 由 度 汽 车 参 考 模 型 的 建 立 汽车的线性2自由度模型表征了汽车的理想
行驶状态,用来计 算 获 得 理 想 的 横 摆 角 速 度 和 质 心侧偏角.将汽车 简 化 为 只 有 2 个 车 轮 组 成 的 模 型,只有侧向运动和绕z 轴的横摆运动,见图2.
最后将车身模 型,轮 胎 模 型 还 有 其 他 支 持 模 块连接起来就建立图4的汽车非线性整车模型, 汽 车 参 数 见 表 2.
图 4 7 自 由 度 汽 车 模 型 表 2 汽 车 参 数
m/kg d/m I/(kgm2) h/m a/m b/m L/m 1 580 1.42 2 350 0.552 1.237 1.303 2.54
1 汽车稳定控制系统的控制方法
1.1 稳 定 性 控 制 系 统 的 结 构 为了清晰的显示汽车稳定控制系统的工作过
程,把 控 制 过 程 分 成 信 息 采 集 模 块、数 值 估 算 模 块、2自由度 汽 车 模 型 模 块、稳 定 性 判 断 模 块、控 制器模块和执行机构模块这 6 个 模 块,见 图 1.信 息 采 集 模 块 采 集 轮 速 、实 际 横 摆 角 速 度 、横 向 加 速 度、纵向 加 速 度、转 向 盘 转 角 这 5 个 信 息;数 值 估 算模块估算出汽 车 车 速、前 轮 转 角 和 实 际 质 心 侧 偏角;2自由 度 汽 车 模 型 模 块 计 算 出 参 考 横 摆 角 速度和参考质心 侧 偏 角.稳 定 性 判 断 模 块 判 断 车 辆的稳定状态.控 制 器 模 块 计 算 得 出 制 动 压 力 和 制 动 轮 信 息 ,最 后 由 执 行 机 构 负 责 实 际 调 节 . 1.2 汽 车 失 稳 原 因 及 控 制 方 法
基于 Simulink的汽车稳定控制系统仿真研究
程旭峰 冯 帅 刘晨阳
(东 北 大 学 机 械 工 程 与 自 动 化 学 院 沈 阳 110004)
摘要:为了解决汽车行驶中的某些因 素 引 起 的 失 稳 问 题,在 对 汽 车 的 失 稳 原 因 和 控 制 方 法 的 分 析
和研究的基础上,设计了以横摆角速 度 和 质 心 侧 偏 角 为 控 制 量 和 失 稳 判 据 ,以 车 轮 的 差 动 制 动 为
轮胎所能产生的 最 大 附 着 力.反 映 汽 车 稳 定 性 最
重 要 的 参 数 有 2 个 :横 摆 角 速 度 和 质 心 侧 偏 角 .其
中横摆角速度反 映 汽 车 本 身 的 稳 定 性,即 车 身 摆
动;质心侧偏 角 则 反 映 汽 车 轨 迹 的 保 持 情 况 . [1-2]
因此选择横摆角速度和质心侧偏角作为主要控制
的 稳 定 性 判 据 式 (2)[4].
·
C1β+C2β ≤1 式中:C1,C2 为常数.
(2)
汽车稳定控制的差动制动法是通过分别调节
4个车轮的 制 动 压 力 来 保 持 汽 车 的 稳 定 性 的,制
动力的分配可以根据前轮转角δ 和横摆角速度的
偏差值 Δω 来确定,制动压力的分配见表1.
表 1 制 动 力 分 配[5-6]
汽车失稳是由于维持汽车稳定需要的力大于
收 稿 日 期 :2013-11-19 程旭峰(1986- ):男,硕士生,主要研究领域为汽车主动安全
第1期
程旭峰,等:基于 Simulink的汽车稳定控制系统仿真研究
· 223 ·
2 汽车模型的建立
图 1 稳 定 控 制 系 统 原 理 图
控制手段的汽车稳定性控制系统.并分 别 设 计 了 模 糊 PID 控 制 器 和 神 经 网 络 控 制 器,运 用 MAT-
LAB/Simulink 软 件 在7 自 由 度 汽 车 模 型 上 进 行 了 仿 真 .结 果 显 示 在 危 险 状 态 下 该 控 制 策 略 能 有 效
保 持 汽 车 轨 迹 对 转 向 操 作 的 跟 随 ,该 控 制 策 略 可 靠 有 效 .
· 224 ·
武 汉 理 工 大 学 学 报 (交 通 科 学 与 工 程 版 )
2014 年 第 38 卷
1.3;峰值因子 D1 =a1Fz2+a2Fz,D2 =b1Fz2+ b2Fz;B1C1D1 = (a3Fz2 + a4Fz)exp(- a5Fz), B2C2D2 =b3sin[b4arctan(b5Fz)];刚度因子B1 = B1C1D1/C1D1,B2 = B2C2D2/C2D2;曲 线 曲 率 因 子 E1 =a6Fz2+a7Fz +a8,E1 =b6Fz2+b7Fz +b8;x =α+Sh;λ 为 纵 向 滑 移 率;α 为 轮 胎 侧 偏 角;ai,bi 为拟合系数 . [9]