汽车操纵稳定性仿真
汽车操纵稳定性虚拟仿真研究
式中
为车轮绕其中心轴 的转动惯量 , 若车辆为后轮驱动 , i 34 为滚动阻力系数 = / ; i 则 = , a R ∞ 为
车轮旋转 角速 度 。 从 动轮 回转动 力 学方程 为
=
R一, .
() 2
若 车辆处 于制 动状 态 , 车 轮运动 方程 为 则
=
R— 一 ( =1 … , ) F i , 4,
汽 车 操纵 稳定 性 虚 拟仿 真 研 究
彭鹏 峰 魏 朗 ,
( . 东白云学院, 东 广 州 5 0 5 ;. 1广 广 14 0 2 长安 大学 汽车 学院 ,陕西 西安 70 5 10 4)
摘要 : 基于汽车操纵 动力 学理 论建 立 了汽车 动力 学模 型 , 用 虚拟 仿真 技术 , Z 6 0 H 客车 为仿 真对 象 、 利 以 K 10 V +为平 台开发 了汽车操 纵稳定性虚 拟仿真系 统 , 以转 向盘 角阶跃输入试 验为例进 行 了仿 真分析 。该系 C+ 并 统还 可以对转 向盘角脉冲试验 、 稳态转 向特性试验和单 移线试 验进行虚 拟仿真 分析 。本 研究 的完成使得 在计 算机 上进行车 辆操 纵稳 定性 的试验模 拟及评价 分析成为了可能 。
以虚拟 现实 技术 为手 段来进 行 汽车操 纵稳 定性 的研 究 成 为必 要 和 可 ¨。本 文基 于汽 车操 纵 动 力学 理
论和虚拟现实技术 , Z 6 0 H客车为仿真对象 、c+ 为平台开发 了汽车操纵稳定性虚拟仿真系统。 以 K 10 V +
1 车 辆 动 力 学 模 型
在进行操纵稳定性虚拟仿真研究 中 , 建立 车辆动力 学模型是基础工作 之一。虚拟仿真研究要求 具有很高的实 时性 , 因此动力学模型应在满足研究需求的条件下尽量简化。本文建立了 9自由度汽车 操纵稳定性动力学模型 , 个 自由度分别为 : 向盘的转动 , 9 转 整车纵 向、 向、 侧 侧倾 、 横摆运动和 4个车
ADAMS_Car在汽车操纵稳定性仿真中的应用
因此,ADAMS/Car在汽车动力学分析和仿真上具有较好的应用前景。
2)当汽车具有不足转向特性时,稳态横摆角速度变化不大,而峰值(超调量)变化较大。
车速对汽车稳态转向特性的影响明显。
参考文献:[1]石博强,等.ADAMS基础与工程范例教程[M].北京:中国铁道出版社,2007.[2]邓亚东,等.ADAMS在汽车操纵稳定性仿真分析中的运用[J].武汉大学学报(工学版),2005,38(2):95—98.[3]余志生.汽车理论(第4版)[M].北京:机械工业出版社,2006.[4]王国强,等.虚拟样机技术及其在ADAMS上的实践[M].西北工业大学出版社,2002.[5]于海峰.基于ADAMS/Car的悬架系统对操作稳定性影响的仿真试验研究[D].大连理工大学硕士学位论文。
2007.[作者简介】黄志刚(1966一),男(汉族),上海市人,博士,教授。
中国计算机用户协会仿真应用分会理事,主要研究车辆工程等;王丰(1982一),男(汉族),湖北荆门市人,硕士研究生,主要研究虚拟技术与仿真;朱慧(1973一),女(汉族),陕西西安市人,博士,副教授,主要研究图像处理等;王晶(1973一),女(汉族),浙江宁波市人,硕士,副教授,主要研究机械工程及自动化等。
(上接第283页)图6Madab仿真曲线5结论文中根据水泥工业中,分解炉的大时滞、大惯性、非线性的特点,用传统PID算法很难达到满意的控制效果。
文中介绍了一种新型复合型模糊预测控制算法,结合预测控制的预报功能和模糊控制在大偏差范围时响应较快的理想控制效果,相互切换,优势互补。
通过对三种控制策略在Matlab中的仿真曲线进行比较,可得出如下结论:与单纯的模糊控制、预测控制相比,这种复合型模糊预测控制有较快的相应速度,超调更小,温度波动更小,控制效果更好。
另外,此复合型模糊预测控制系统原理简单,易于工程实际应用,适用于水泥等一类大时滞、大惯性的过程控制系统。
基于EPS控制策略轿车整车操纵稳定性仿真分析及研究论文
基于EPS控制策略的轿车整车操纵稳定性仿真分析及研究【摘要】本文介绍一种基于eps控制策略的轿车整车操纵稳定性仿真分析及研究,研究发现pid控制中的积分增益对微型汽车的方向盘力矩影响比较大,其他几个数值对方向盘力矩和整车的横摆角速度影响较小,这将对轿车整车操纵稳定性的研究提供很好的研究依据。
【关键词】eps 仿真分析研究试验汽车操纵稳定性是指汽车能正确执行驾驶员通过转向系及转向车轮给定的行驶信号,并且当汽车在行驶过程中遇到外界干扰时,汽车具有抵消干扰安全行驶的能力[1]。
汽车控制是靠驾驶员对转向系统的操纵而进行的,在一般的操纵条件下能够达到要求,但汽车处于恶劣工作状态或紧急状况时,汽车的控制往往比较困难,而绝大多数交通事故就发生在这种非理想的驾驶状况下,所以在这些工况下增加辅助控制以提高汽车操纵性、稳定性是十分必要的[2][3]。
1汽车操纵稳定性的评价方法1.1评价方法汽车的操纵稳定性要通过实验才能进行评定,这种评定有客观评价法和主观评价方法[4]。
主观评价方法主要是通过让评价人员去驾驶,然后让评价人员根据的自己的经验和驾驶感觉做一个主观上的评价,然后按照评分标准来对汽车的操纵稳定性进行评分,主观评价有定量评价和定性评价两种形式。
操纵负荷,转弯的稳定性直线行驶的能力,行车变道的可操作性等式主观评价的评价内容。
用测试仪器测出表征汽车行驶性能的一些数值,如横摆角速度,侧向加速度,转向力等来对汽车的操纵稳定性进行评价的方法是客观评价。
对系统进行试验的话,一般要采用主观评价和客观评价相结合的方式,以期对汽车的操纵稳定性做出最准确的评判[5]。
2 eps控制策略的参数对整车操纵稳定性影响的仿真分析2.1控制策略参数分析本文采用的控制策略是pid控制,所以主要研究pid控制策略里面三个增益值,比例增益(p)、积分增益(i)、微分增益(d)对操纵稳定性的影响pid控制的三个增益值,通过仿真调节得到:1.比例增益p在在仿真调节的过程中,p的数值在0.2~1.13之间超调量和反应时间是比较合适的,所以把比例增益p的范围取在0.2~1.13之间,本文所选的三个比例增益数值分别为0.2、0.6650、1.1300。
汽车操纵稳定性虚拟仿真的研究
de l pe Fi aly, i u aton x ve o d. n l a s m l i e am pl was ve e gi n. Ke ywor : Ve c e ha ds hi l ndlng t biiy i s a lt Dyna i sm ul i m c i aton Vi t l e lt r ua r a iy
熊 竖 曾 纪 国 宋健
( 明理 工 大 学 ) 昆
( 华 大学 , 车 安 全 与 节 能 国家 重 点 实验 室 ) 清 汽
I 要 l 应用 现代 虚拟 现 实技 术 , 汽 车操 纵稳 定性研 究 传 统 的 数 字 仿 真 变 成 为 具 有 “ 实 场 景 的 虚 拟 仿 摘 把 真
汽 车 操 纵 稳 定 性 的研 究 方 法 可 以分 为 两 大 类 ,
一
类 为 实验 研 究 , 一 类 为理 论 分 析 或 动 态 仿 真 研 另
究 。近十年来 , 由于 计 算 机 技 术 的 飞 速 发 展 以 及 对 汽 车 模 型 和 轮 胎 模 型 的 精 确 构 建 , 计 算 机 仿 真 技 以
术 为 手段 , 究 汽 车 的操 纵 动 力 学 已成 为 该 领 域 研 研
究 中 的 主要 方 向之 一 。但 由于 这 种仿 真 技 术 是 数 字 化 的, 因此 , 真 结 果 多 数是 以 数 据 的 形 式 给 出 , 仿 有 时 以 曲 线 或 图 形 ( 框 ) 画 的 形 式 给 出 这 种 仿 线 动 真 方 法 , 于 汽 车 操 纵 动 力 学 的 研 究 , 优 点 是 可 用 其 以分 析 研 究 汽 车 操 纵 动 力 学 的 相 关 参 数 , 测 汽 车 预
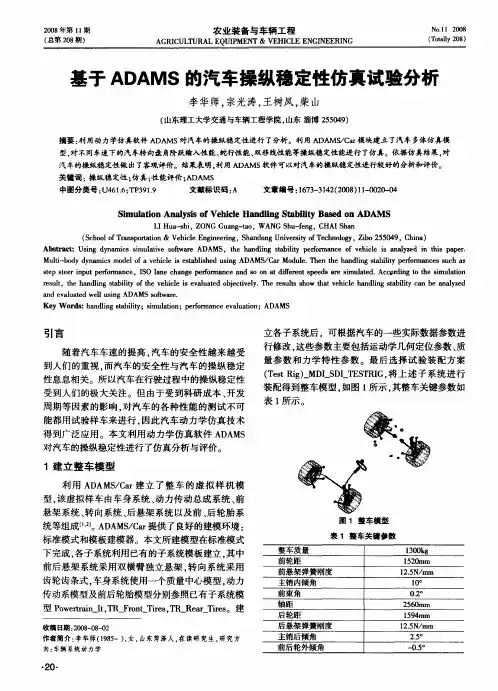
基于ADAMS的汽车操纵稳定性仿真试验分析
(c ol f rnpr t n& V hc n ier g S ad n nvrt o eh o g , io2 5 9 C ia S ho o asot i T ao e ieE g ei , hn ogU iesy f c nl y Zb 5 0 , hn ) l n n i T o 4
e ut h ad n t it f t eil i eaut ojc vl. h eut so t ei e a l gs b i a b l e rsl teh n igs blyo evhc vlae betey T ersl hw ta vh l h di t it C eaa zd , l a i h es d i s h c n n a l n y n y
Ab ta t sr c:Usn y a c i lt e sf r ig d n mis s muai o wae ADAMS,te h n l g sa it efr n e o e il sa aye n ti a r v t h a di tbl p r ma c fv hce i n lzd i hs p p . n i y o e
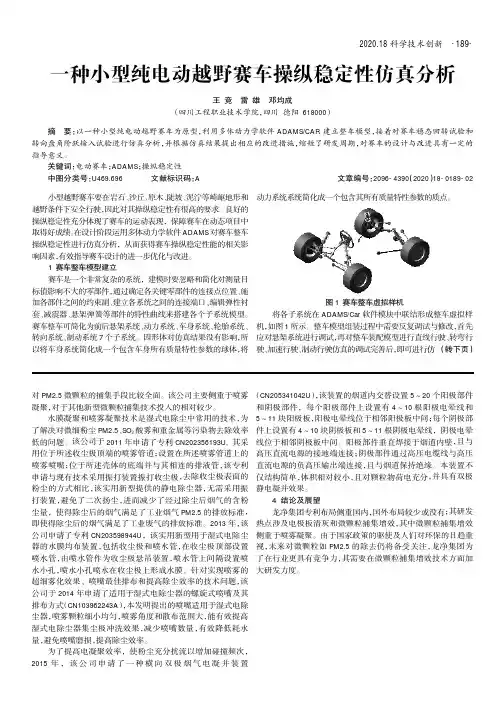
一种小型纯电动越野赛车操纵稳定性仿真分析
2020.18科学技术创新(转下页)对PM2.5微颗粒的捕集手段比较全面。
该公司主要侧重于喷雾凝聚,对于其他新型微颗粒捕集技术投入的相对较少。
水膜凝聚和喷雾凝聚技术是湿式电除尘中常用的技术,为了解决对微细粉尘PM2.5、SO 3酸雾和重金属等污染物去除效率低的问题。
该公司于2011年申请了专利CN202356193U,其采用位于所述收尘极顶端的喷雾管道;设置在所述喷雾管道上的喷雾喷嘴;位于所述壳体的底端并与其相连的排液管,该专利申请与现有技术采用振打装置振打收尘极,去除收尘极表面的粉尘的方式相比,该实用新型提供的静电除尘器,无需采用振打装置,避免了二次扬尘,进而减少了经过除尘后烟气的含粉尘量,使得除尘后的烟气满足了工业烟气PM2.5的排放标准,即使得除尘后的烟气满足了工业废气的排放标准。
2013年,该公司申请了专利CN203598944U ,该实用新型用于湿式电除尘器的水膜均布装置,包括收尘极和喷水管,在收尘极顶部设置喷水管,由喷水管作为收尘极悬吊装置,喷水管上间隔设置喷水小孔,喷水小孔喷水在收尘极上形成水膜。
针对实现喷雾的超细雾化效果、喷嘴最佳排布和提高除尘效率的技术问题,该公司于2014年申请了适用于湿式电除尘器的螺旋式喷嘴及其排布方式(CN103962243A ),本发明提出的喷嘴适用于湿式电除尘器,喷雾颗粒细小均匀,喷雾角度和散布范围大,能有效提高湿式电除尘器集尘极冲洗效果,减少喷嘴数量,有效降低耗水量,避免喷嘴磨损,提高除尘效率。
为了提高电凝聚效率,使粉尘充分扰流以增加碰撞频次,2015年,该公司申请了一种横向双极烟气电凝并装置(CN205341042U ),该装置的烟道内交替设置5~20个阳极部件和阴极部件,每个阳极部件上设置有4~10根阳极电晕线和5~11块阳极板,阳极电晕线位于相邻阳极板中间;每个阴极部件上设置有4~10块阴极板和5~11根阴极电晕线,阴极电晕线位于相邻阴极板中间。
基于Trucksim整车操纵稳定性仿真分析研究
图 1 T r u c k s i m 工 作 界 面 和 组 成
1 . 1 车辆模 型的建 立
立模 型 的可信 度 , 而且 在产 品开 发过 程 中减少 大量
的物 理样 机测 试 , 缩 短 了开 发周 期 , 大 大 降低 了开
发成 本 。
T r u c k s i m软 件 中车 辆 模 型 由车 体 、 轮胎 、 动 力 总成 、 悬架 系统 、 转 向系统 、 制动 系统 以及 空气 动力
D O I : 1 0 . 3 9 6 9 / j . i s s n . 2 0 9 5— 5 0 9 X . 2 0 1 7 . 0 2 . 0 0 6
基于 T r u c k s i m 整 车 操 纵 稳 定 性 仿 真 分 析 研 究
章 雪华 , 石柏 军 , 李 岩
( 华 南理 工大 学机 械 与汽车 工程 学 院 , 广东 广州 5 1 0 6 4 0 )
收 稿 日期 : 2 0 1 7一 O l一 0 5
1 ) 车体 : 以某款改装专用 车为例, 其 整 车 长/ 宽/ 高为 7 5 3 0 m m / 2 4 6 0 m m / 2 8 4 0 m m, 质 心 高 度 l 1 7 5 m m, 质心距前轴距离 1 1 0 0 m m, 轴距 4 2 om m, 簧
基于ADAMS和MATLAB的汽车操纵稳定性联合仿真
力 ; 为 附加力 矩 。 前 馈 补 偿 (edow r o estn 控 制 器 FefradC mpnai ) o ( 3是 用来使 质 心侧 偏角 趋 近于 0 为 了实现 此 图 ) 。 目的 ,作 为控 制输 入 的横 摆 力矩 和 前轮 转 角之 间
1仿 真 系统 模 型
11 . AD MS C r 车模 型 A / a整
收稿 日期 :0 2 0 — 5 2 1- 5 1
第5 0卷第 8 期
王行 等:基于 A A D MS和 M T A A L B的汽车操纵稳定性联合仿真
3 9
设计反馈 控制补偿器 (edow r ot l r F efradC nr l ) oe 能使车辆模型很好 地跟踪期望 的理想模 型 ,并 有效
X= X B I+ 。 A + M ̄砸
选取软件 自带的各子系统和修改后的车身子
系 统 组 装 为 整 车 模 型 [。 数 界 面 和 整 车 模 型 如 1参 1
表 1 图 1 示。 和 所 12 车辆 控制 模块 设计 .
为提高 车辆 的操 纵稳 定性 , 使质 心侧偏 角 和 须
基 于 AD AMS和 MAT AB的 L
汽车操纵稳定性联合仿真
王行 , 阳林 , 贺绍华 ,夕 & 旦 -才望 Z
( 10 6广东省 广州市 广东工业 大学 机 电工程学院) 50 0 [ 摘要]本文通过利用 A a / A dmsC R建立了整车动力学仿真模 型; 于 D C控制方法和线性二次型最优控制理 基 Y
抵抗外界干扰。 故采用前馈一反馈的复合控制方式。
图 4 反馈 控 制器
Fi. e ba k c n r l g4 F ed c o tol er
基于Matlab_Simulink的四轮转向车辆操纵稳定性仿真
引
言1
四轮转向[1] (Four-wheel steering, 4WS)作为一种有效
描述系统典型环节,因此十分方便地建立系统模型而不 需要花较多时间编程。并可以对系统作适当的实时修正 或者按照仿真的最佳效果来调试及整定控制系统的参 数,以提高系统的性能,减少设计系统过程中反复修改 的时间,实现高效率地开发系统的目标。本文基于 Matlab/simulink 对四轮转向车辆的控制系统进行了设计, 并对 4WS 车辆的操纵稳定性进行了仿真研究。
1 4WS 车辆运动的数学模型
理论和实验都证明 [3] , 在正常车速范围 (一般意义 的低速到高速)的非紧急状态( low-g,低侧向加速度) 和小操纵转角输入情况下,二自由度车辆横向运动动 力学模型的精度是足够的。 车辆状态量为质心侧偏角 â 和 横 摆 角 速 度 r, 还 研 究 与 它 们 相 关 的 侧 向 加 速 度 & + r ) ,运动方程[4]如下: a y = V (β
改善车辆操纵性能的技术,近期在高档车中应用正受到 更多重视,有在中低档车上应用的趋势。使用 4WS 技术 的主要目的有:①减少车辆质心侧偏角β;②减少车辆 横摆率与车辆横向加速度之间的相差;③增加轮胎横向 力的裕度,使其远离饱和状态。从驾驶的观点看, 4WS 车辆低速时有较小的转弯半径,这增强了车辆的低速性 能,如更加灵活或和方便于泊车;高速时 4WS 车辆由于 由较小的β角和相差,高速变道将更加平滑,操纵控制 更容易,乘客感觉更加舒适;高速紧急避让时,车体较 少甩尾,减少了车体扫过的包线面积,从而减少了碰撞 的可能性。 Matlab 作为一种面向科学和工程计算的高级计算机 语 言 , 已 成 为 国 际 科 技 界 公 认 的 最 优 秀 应 用 软 件 [2] 。 Simulink 是 Matlab 提供的主要工具箱之一,用于可视化 的动态系统建模、仿真和分析。它采用系统模块直观地
基于ADAMS的汽车操纵稳定性仿真试验分析
引 言
和沃尔沃等公司合作开发的轿车专用分析软件包 , 集成 了他 们 在 汽 车 设 计 、 开 发 方 面 的 专 家 经 验 ,在
干 扰而 保 持稳 定 行驶 的 能力 。 汽 车操纵稳 定性 作为汽车 动力学 的一个 重要分支 , 对 汽车 驾驶起 着 非常重 要 的作用 。在汽 车 的设计研 发过 程 中 ,对 操 纵稳 定性能 的评价 主要 采用 实车试 验评 价方 性 能参 数 【。 2 J
2 、整车模型 的建立
动力学仿真分析软件 ,它使用交互式 图形环境和零件
库 、约 束 库 、力库 ,创建 完 全参 数化 的机械 系 统几 何模
图 1整车模型 的建模 过程
型, 它对虚拟机械系统进行静力学 、 运动学和动力学分 析 ,输 出位 移 、速 度 、加速 度和 反作用 力等 曲线 , A A S软件 的仿真可用于预测机械系统的性能、 D M 运动 范围、 碰撞检测 、 峰值载荷 以及计算有限元 的输入载荷 等。它为用户提供 了强大的建模、仿真和分析功能。
F - — H-
—
} { {
一
f
ff = = 千1
{ ; j ; f { l 『
{ f { f 1 } i —
II_ ~ ’ — - -
。 一 h~
— I —~ f 一 _ 。
/ /
一 — —
汽车横摆角速度的瞬态响应 曲线如下 图 6 所示 。
r 一 一 - —} L - ’十I - 卜 Ik 一 — 十 ~}
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
得到转向时松油门的转向盘的转弯实验转角时域图:
图11
从图11可以看出车辆稳定运行与车辆在稳态运行时突然收油门车辆运行情况的区别,可以看出收油门后车辆转弯半径不断减小。
然后得到油门开度请求数据与时间图:
图12
可以看出,0~10s油门开度从增加到趋于稳定,25.6s之后,松开油门,油门开度为0.
4.弯道收油门仿真
侧偏最常见于汽车转弯。汽车转弯时,前后轮都会产生侧偏角。如果前后轮侧偏角相等,则汽车实际转弯半径等于方向盘转角对应的转弯半径,称为“中性转向”;如果前轮侧偏比后轮大,汽车实际转弯半径大于方向盘转角对应的转弯半径,称为“不足转向”;如果后轮侧偏比前轮大,汽车实际转弯半径小于方向盘转角对应的转弯半径,称为“过度转向”。
图5
得到的时间——角度曲线为;
图6
得到的时间——速度曲线为:
图7
得到的时间——加速度曲线为:
图8
从图6中可以得到,在10s时驾驶员松开手让汽车回正,大概2.5s之后达到新的稳态,速度也逐渐稳定。在2.5s后加速度还很明显,但是越来越小,大概5s后到达新的稳定状态。
3.松油门转弯仿真
该仿真试验车辆在稳态回转时突然抬起油门踏板,使油门开度为0;然后以设定的角速度继续向回转圆内转向直至汽车的纵向速度小于2.5 m/s。仿真分为两个阶段执行,第一阶段在圆环形车道上将车辆加速,使车辆产生设定的侧向加速度,作为松油门转弯试验前的稳态条件;第二阶段关闭油门,发动机怠速或反牵引转速,然后以设定的角速度转动方向盘使汽车的回转半径逐步减小直到仿真结束。
弯道收油门仿真仅实验在稳态回转时油门突然关闭对车辆运动的影响。在关闭油门时,可以设置方向盘锁定或由驱动器调节转向值维持原转弯半径。从这种仿真中,我们可以得到车辆的性能参数有航向偏移、纵向减速度、侧滑角、横摆角、倾斜角等。弯道收油门仿真对回转半径的变化比较敏感,仿真收油门动作执行到5s结束。
设置半径为15m,仿真之后得到的轨迹如下图:
设置的试验参数如下:稳态回转侧向加速度为0.65g,稳态回转半径20m,第二阶段的转角延时量20,转向角速度60deg/s,模拟之后得到的图像为:
图9
图10
当汽车的油门关闭时,发动机怠速或反牵引转速,然后以设定的60deg/s的角速度转动方向盘,使转弯半径逐渐减小直到仿真结束。
在做仿真曲线的时候,纵坐标为驾驶员的转向请求数据,反映转向器的力的需求采用斜坡控制,是一个便于控制计算的相对值,与转向轮的最大最小扭矩相适应。约在2s后趋于稳定,10s后关闭油门,得到如下曲线:
实验
一.实验目的
1.了解和掌握汽车操作稳定性实验条件、试验规程、数据实验方法以及实验仪器设备。
2.熟悉掌握Adams/Car软件的应用并能实际操作完成汽车操控性仿真的全过程。
二.实验器材
Adams软件、计算机一台
三.实验结果与分析
1.定转弯半径仿真
汽车在行驶过程中,由于路面的侧向倾斜,侧向风或者曲线行驶时的离心力等的作用,车轮中心沿车轴方向产生一个侧向力F。因为车轮是有弹性的,所以,在侧向力F 未达到车轮与地面间的最大摩擦力时,侧向力F 使轮胎产生变形,使车轮倾斜,导致车轮行驶方向偏离预定的行驶路线。这种现象,就称为汽车轮胎的侧偏现象。汽车轮胎的中心线,在侧向力F 的作用下,与车轮平面错开了一定距离,而且有一个倾斜角,这个倾斜角,就叫做汽车轮胎的侧偏角。
在设置转弯半径28m,车辆以10km/h的初速度加速到120km/h时,汽车行驶到最后阶段失去控制,脱离预先设计好的圆形轨道。其行驶轨迹如下图所示;
图1
从图中我们可以看出,汽车在行驶大概一圈的时候冲出轨道,且距离圆心随着时间增长越来越远。这是由于随着速度的不断增加,汽车所受到的侧向力不断变大,当地面的摩擦力不足以平衡侧向力时,汽车便会失去控制。从图中可以看出,在汽车达到120km/h时候汽车已经偏原来的轨道很大一段距离。
得到的蛇形轨迹如下所示:
图16
处理后得到车辆横摆角随时间的曲线:
图17
然后对曲线取绝对值入下:
图18
从曲线可以看出车辆绕标杆多次穿越行驶的过程,其横摆角度大小与方向呈周期性变化。
处理后得到的车辆侧倾角的曲线(已取绝对值):
图19
从图中可以看出,刚开始时,侧倾角变化的幅度和频率比较大,后来慢慢趋于平稳。考虑到车辆侧倾角的影响因素主要为:前后轴左右两侧的车轮垂直载荷发生变化;由于悬架导向杆系的运动及变形,外倾角将随之变化;车身侧倾时悬架变形,悬架导向杆系和转向杆系发生运动及变形。侧倾角趋于稳定可能是因为汽车蛇形行驶时,逐渐适应那种情形而产生相应的阻尼力。
在这实验的基础上,改了一下数据,设置转弯半径20m,出事加速度0.1m/s^2最终加速度为4m/s^2,得到了以下曲线:
图2
图3
从图中,我们可以得到,汽车在设定好的轨道中良好运行,没有冲出跑道。再上一个控制速度的实验中,所得到的最终加速度的大小大概为5.5g,而控制加速度的实验中,所得到的最终加速度大小为0.4g,明显小于前者,因此猜想,当汽车的加速度比较大时,汽车比较容易冲出跑道
四.实验总结
经过本次实验,我进一步了解了Adams car的基本功能,并更好掌握了它的一些操作流程,为后续工作打下了较好的基础。转角随时间变化的曲线为:
图15
从图中可以看到,5s的时候油门开度达到最大,5~10s趋于平稳,10s时候突然松油门,油门开度瞬间为0。从方向盘转角可以看出2s左右开始打方向盘,4s左右方向盘的转角稳定在260°左右。
5.蛇形穿越
蛇形穿越原指在路面上直线竖立一系列的标杆,让汽车在两侧多次变速穿越行驶。为了在软件中实现,首先必须制定路径和车速。为了简化起见,用事件模拟器建立事件后再进行文件驱动仿真。
为了证实以上猜想,设定转弯半径20m,初始加速度0.01g,最终加速度5g,得到以下实验曲线:
图4
从曲线中可以发现,与控制速度基本一致,因此猜想正确。
2.回正性仿真
在Adams的回正性仿真模拟中设置参数,变速器的档位为3,触发制动时侧向的加速度为0.3g,试验车速为60km/h,引道长度为20m,得到汽车行驶的轨道。