自动控制理论第2章
自动控制理论第二章习题答案
式中 K 为比例常数, P 为阀门前后的压差。若流量 Q 与压差 P 在其平衡点 (Q0 , P0 ) 附近作微小变化,试导出线性化
方程。 解:
设正常工作点为 A,这时 Q0 = K P0
在该点附近用泰勒级数展开近似为:
y
=
f
(
x0
)
+
df (x) dx
x0
(
x
−
x0
)
即 Q − Q0 = K1 (P − P0 )
其中 K1
= dQ dP P=P0
=
1K 2
1 P0
2-7 设弹簧特性由下式描述:
F = 12.65 y1.1
其中,是弹簧力;是变形位移。若弹簧在变形位移附近作微小变化,试推导的线性化方程。 解:
设正常工作点为 A,这时 F0
=
12.65
y1.1 0
在该点附近用泰勒级数展开近似为:
2-3 试证明图2-58(a)的电网络与(b)的机械系统有相同的数学模型。
2
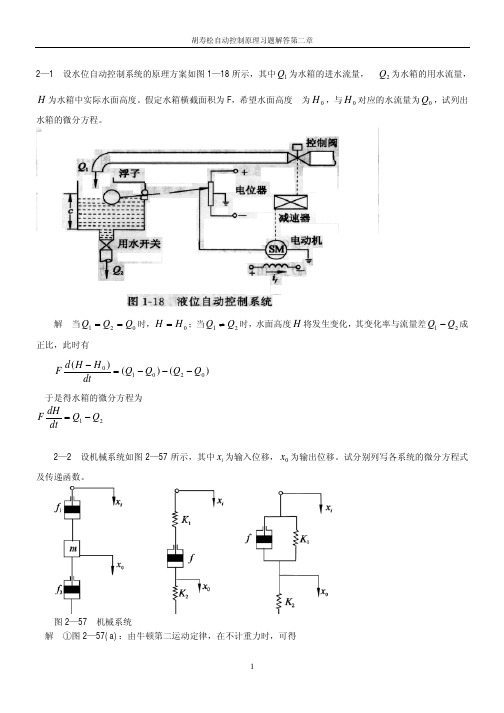
胡寿松自动控制原理习题解答第二章
图 2-58 电网络与机械系统
1
解:(a):利用运算阻抗法得: Z1
=
R1
//
1 C1s
=
R1 C1s
R1
+
1 C1s
=
R1 = R1 R1C1s + 1 T1s + 1
Z2
=
R2
+
1 C2s
(C2
+
2C1 )
du0 dt
+ u0 R
=
C1C2 R
d 2ui dt 2
自动控制原理第2章
电气信息学院
任课教师: 高秀梅
1
第二章 控制系统的数学模型
§2-1 微分方程 §2-2 传递函数 §2-3 动态结构图 §2-4 信号流图 §2-5 梅逊(Mason)公式 §2-6 自动控制系统的传递函数
2
一、什么是数学模型? 二、为什么要建立数学模型? 三、建立数学模型的方法? 四、数学模型的形式有哪些?
2) . 比例定理: f (t ) Kf1 (t ), L[ f1 (t )] F1 (s) 若 则 st
0
L[ f (t )] Kf1 (t )e dt KF1 ( s)
1)和2)为拉氏变换的线性特性。 3). 微分定理: 若 L df (t ) df (t ) e at dt sF (s) f (0 ) dt dt 0 则
1、系统输入量: F(t) 输出量: y(t) 2、列写方程组:
F(t)
k m f y(t)
11
§2-1 微分方程
3、消去中间变量并写成标准形式:
m d y (t ) f dy ( t ) 1 y (t ) F (t ) 2 k k dt k dt
令T
2 2
2
m f 1 , , K k k 2 mk
有
T
d y (t ) dt 2
dy ( t ) 2 T y ( t ) KF ( t ) dt
12
§2-1 微分方程
例3 求下图的微分方程
i1
i1
i
i2
13
§2-1 微分方程 二、线性微分方程式的求解
工程实践中常采用拉氏变换法求解线 性常微分方程。 拉氏变换法求解微分方程的基本思路:
第2章 自动控制理论基础
C (S ) K G (S ) R( S ) S 1
如直流电机的励磁回路(回路电感L和电阻R):当励磁电
压输入u时,其输出励磁电流i就相当于一个惯性环节。
di(t ) L Ri (t ) u (t ) dt
I (S ) 1 G (S ) U (S ) L S 1 R
Z1, Z2 , Z m为传递函数零点; P 1,-P 2, Pn为传递函数极点
由前述讨论可知:典型二阶系统的全部性能只由两个参数:ζ、ω n所确 定,而根据闭环极点S1、S2和S平面上的位置又可确定出对应的ζ、ω n,
因此,只要闭环极点的位置确定,该系统的全部性能也就被完全确
如下述电路:
Ui(t) C
C (S ) G(S ) S R( S )
R Uo(t)
1 uo (t ) ui (t ) dt uo (t ) C R
G (S )
UO (S ) RCS U i (S ) RCS 1
相当于一个惯性环节和一个微分环节的组合,只有当RC 远远小于1时,相当于微分环节。
二
一阶系统暂态性能(第三讲)
微分方程为:
T
C (S ) K 传递函数为: G ( S ) R( S ) TS 1
C
dc(t ) c(t ) Kr (t ) dt
R(S) — R u1(t)
K C(S) TS
实例:如右图所示的电路图,微分方程 为:
2 2 1
du (t ) RC u (t ) u (t ) dt U (S ) 1 传递函数为: G (S ) U ( S ) RCS 1
开环传递函数(G0(S)):反馈信号B(S)与误差信号E(S)之比。
自控原理课件 第2章-自动控制系统的数学模型

第2章 自动控制系统的数学模型
第2章 自动控制系统的数学模型
第2章 自动控制系统的数学模型
第2章 自动控制系统的数学模型
第2章 自动控制系统的数学模型
第2章 自动控制系统的数学模型
第2章 自动控制系统的数学模型
第2章 自动控制系统的数学模型
第2章 自动控制系统的数学模型
2.2.2 传递函数 建立数学模型的目的是为了对系统进行性能分析。分析 自动控制系统最直接的方法是求解微分方程,求得被控 量在动态过程中的时间函数,然后根据时间函数的曲线 对系统性能进行分析。求解的方法有经典法、拉氏变换 法等。 拉氏变换法是求解微分方程的简便方法,当采用这一方 法时。微分方程的求解就成为象函数的代数方程和查表 求解,使计算大为简化。更重要的是,采用拉氏变换法 能把以线性微分方程描述的数学模型转换成复数域中代 数形式的数学模型——传递函数。传递函数不仅可以表 征系统的性能,而且可以用来分析系统的结构和参数变 化对系统性能的影响。经典控制理论中应用最广泛的频 率特性法和根轨迹法就是以传递函数为基础建立起来的, 传递函数是经典控制理论中最基本最重要的概念。
解:(1)确定输入和输出量。网络的输入量为 电压ur(t),输出量为电压uc(t) (2)根据电路理论,列出原始微分方程。
第2章 自动控制系统的数学模型
第2章 自动控制系统的数学模型
第2章 自动控制系统的数学模型
第2章 自动控制系统的数学模型
第2章 自动控制系统的数学模型
第2章 自动控制系统的数学模型
第2章 自动控制系统的数学模型
1.信号线 信号线是带有箭头的直线,箭头表示信号的流向,在直线旁标 记信号的象函数,如图2.20(a)所示。 2.引出点 引出点表示信号引出或测量的位置。从同一位置引出的信号在 数值和性质上完全相同, 图2.20(b)所示。 3.比较点 比较点表示多个信号在此处叠加,输出量等于输入量的代数和。 因此在信号输入处要标明信号的极性,如图2.20(c)所示。 4.功能框 功能框表示一个相对独立的环节对信号的影响。框左边的箭头 处标以输人量的象函数,框右边的箭头处标以输出量的象函数, 框内为这一单元的传递函数。输出量等于输入量与传递函数的 乘积,即
自动控制理论第二章2
+
斜率1/T
0T
t
三、积分环节
特点:输入量输出量之间的关系满足下列方程
dc(t)K(t) r 或 c(t)Kr(t)dt
dt
传递函数: G(s) C(s) K R(s) s
单位阶跃响应:
r(t)1(t)
R(s)1 s
C(s)G (s)R(s)K1 ss
c(t) Kt
常见物理系统:电机拖动系统
—阻尼系数(阻尼比)
单位阶跃响应:令K=1
1
1
C (s)G (s)R (s)T2s22T s1s
C(s)
s2
2 n
2 nsn
1 s
1s s2
s2 n 2 nsn
n
1 T
G (s ) 1 s (sn )2 s n n1 2 2 (sn )2 n n1 2 2
令: dn 12
G(s(t)1(t)
R(s)1 s
C (s)G (s)R (s)s1 s
c(t)(t)
输入是单位阶跃响应,即r(t)=1(t),则输出的单位阶跃响应为:
c(t)d1(t)(t)
dt
几个实际微分的例子
C
i
u(t)
R
y(t)
RC串联电路
Y(s) R RCs U(s) 1sCR RCs1
Tdc(t)c(t)K(rt) dt
传递函数: G(s)C(s) K R(s) Ts1
T —时间常数
K—比例系数
单位阶跃响应:
r(t)1(t)
R(s)1 s
C (s)G (s)R (s) K1 T s1 s
C(s)K 1 ss1 1/T
c(t)K (1et/T)
自动控制原理第2章(2)
(3) 按信号流向将各框图连起来
Ur(s) + _ I1(s) 1/R1
Uc(s)
华中科技大学文华学院机电学部 自动控制理论
控制系统的结构图与信号流图
方框图等效变换 基本连接方式:串联、并联、反馈 基本连接方式:串联、并联、
1.串联方框的等效变换 1.串联方框的等效变换
R(s) C(s) G1(s) G2(s) R(s) C(s) G1(s) G2(s)
华中科技大学文华学院机电学部 自动控制理论
控制系统的结构图与信号流图
例3 试化简如下系统结构图,并求传递函数C(s)/R(s) 试化简如下系统结构图,并求传递函数C(s)/R(s)
H2(s) R(s)
_ _
G1(s)
G2(s)
_
G3(s) H3(s)
G4(s)
C(s)
H1(s)
解:①将G3(s)输出端的分支点后移得: (s)输出端的分支点后移得: 输出端的分支点后移得
x1 = xr gxc x2 = ax1 fx4 x3 = bx2 exc x4 = cx3 xc = dx4
xr x1
a x2 b -f
x3 c
-g
x4 d
-e
xc
华中科技大学文华学院机电学部 自动控制理论
控制系统的结构图与信号流图
2、由系统结构图绘制信号流图 在结构图的信号线上用小圆圈标志出传递的信号, ①在结构图的信号线上用小圆圈标志出传递的信号,得到节点 用标有传递函数的线段代替结构图中的方框, ②用标有传递函数的线段代替结构图中的方框,得到支路
G(s) H(s)
R(s)
C(s) G(s) 1m G(s)H(s)
化简一般方法:移动分支点或相加点 化简一般方法: 交换相加点 合并
自动控制理论_哈尔滨工业大学_2 第2章线性系统的数学模型_(2.4.1) 典型环节的传递函数PPT
0
t
积分环节在单位阶跃输入下的响应
例:积分器
i2
C
ui R
_
i1
uo
+i1 i2Fra bibliotek1 Rui
(t)
C
d dt
u0
(t )
uo
(t)
1 RC
ui (t)dt
G(s) Uo (s) 1 1 Ui (s) RC s
二、几种典型环节的数学模型
4.微分环节
c(t) d r(t)
斜率1/T
0τ
t
例: • 汽车加速、火箭升空; ——作用力和输出速度
• 加热系统; ——加热量和温度变化
• 励磁回路; ——输入电压和励磁电流
惯性大小用τ来量度。 ——τ越大,接近目标值越慢 ,惯性越大;τ越小,接近 目标值越快,惯性越小。
几乎任何物理系统都包含 大大小小的惯性。
二、几种典型环节的数学模型
滞后环节
二、几种典型环节的数学模型
1.比例环节
y(t) Ku(t)
G(s) Y(s) K U (s)
K——称为比例系数或放大系数,也称为环节的增益,有量纲。
输出量无失真、无滞后、成比例地复现输入。
• 无弹性变形的杠杆;
——作用力和输出力
• 忽略非线性和时间迟后的运算放大器;
——比例放大器的输入电压和输出电压
τ=RC—时间常数
当 r(t) 1(t) 时, R(s) 1
s
Y(s) s 1 1 s 1 s s 1
t
y(t) e
t=0时,输出幅值为1;
t→∞时,指数衰减至0。
二、几种典型环节的数学模型
自动控制理论第一、二章练习题
⾃动控制理论第⼀、⼆章练习题《⾃动控制理论》(⼆)第⼆章测试题⼀、选择题1、⽅框图化简时,并联连接⽅框总的输出量为各⽅框输出量的() A .乘积 B .代数和 C .加权平均 D .平均值2、决定系统传递函数的是系统的() A .结构 B .参数 C .输⼊信号 D .结构和参数3、终值定理的数学表达式为() A .)(lim )(lim )(0s X t x x s t →∞→==∞B .)(lim )(lim )(s X t x x s t ∞→∞→==∞C .)(lim )(lim )(0s sX t x x x t ∞→→==∞D .)(lim )(lim )(0s sX t x x s t →∞→==∞4、梅森公式为() A .∑=?nk k k p 1B .∑=??nk k k p 11C .∑=?nk k11D .∑?kkp 15、斜坡输⼊函数r(t)的定义是()A .t t r =)(B .)(1·)(0t x t r =C .2)(at t r =D .vt t r =)(6、单位抛物线输⼊函数 r(t) 的数学表达式是 r(t) =() A . at 2 B . Rt 2 C .1/2t 2 D . t 27、单位阶跃函数的拉⽒变换是() A . B . C .1/sD . 18、⽐例微分控制器中,微分时间常数越⼤,则系统的()A .动态偏差越⼩B .动态偏差越⼤C .振荡越⼩D .过渡过程缩短 9、同⼀系统,不同输⼊信号和输出信号之间传递函数的特征⽅程() A .相同 B .不同 C .不存在 D .不定 10、控制系统中 , 基本环节的划分,是根据() A .元件或设备的形式 B .系统的物理结构 C .环节的连接⽅式D .环节的数学模型11、单位斜坡函数 r(t) 的数学表达式是 r(t)= () A . a 2t B . t 2 C . t D . vt12、若受控对象存在较⼤的延迟和惯性,效果较好的控制⽅式是()A .⽐例控制B .积分控制C .⽐例微分控制D .⽐例积分控制13、 PI 控制器的传递函数形式是 ( ) A . 5+3s B . 5+4s2 C .D .14、决定系统静态性能和动态性能的是系统传递函数的 ( )A .零点和极点B .零点和传递系数C .极点和传递系数D .零点、极点和传递系数15、令线性定常系统传递函数的分母多项式为零,则可得到系统的 ( ) A .代数⽅程 B .特征⽅程 C .差分⽅程D .状态⽅程16、研究⾃动控制系统时常⽤的典型输⼊信号是()A .脉冲函数B .斜坡函数C .抛物线函数D .阶跃函数17、PID 控制器的传递函数形式是()A .5+3sB .5+3s 1C .5+3s+3s 1D .5+1s 118、拉⽒变换将时间函数变换成() A .正弦函数B .单位阶跃函数C .单位脉冲函数D .复变函数19、线性定常系统的传递函数,是在零初始条件下() A .系统输出信号与输⼊信号之⽐ B .系统输⼊信号与输出信号之⽐C .系统输⼊信号的拉⽒变换与输出信号的拉⽒变换之⽐D .系统输出信号的拉⽒变换与输⼊信号的拉⽒变换之⽐ 20、PID 控制器中,积分控制的作⽤是() A .克服对象的延迟和惯性 B .能使控制过程为⽆差控制 C .减少控制过程的动态偏差D .使过程较快达到稳定21、PD 控制规律指的是( )。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
R3 R4
C
dui (t) dt
R2 R3 R1
ui
(t)
例2-5 列写电枢控制的它励直流电动机的微分方程。
ua取为输入量,θm为输出量。
ua 电枢输入电压 La 电枢电感 Ra 电枢电阻 ia 电枢电流 ea 电枢反电势
m 电动机转角
mc 负载力矩 mm 电磁转矩 fm 电动机轴上
iL R
ui (t)
C
uo(t)
ui
(t)
L
di(t) dt
Ri(t)
uo
(t)
i(t) C duo (t) dt
LC
d
2uo (t) dt 2
+RC
duo (t) dt
uo
(t)
ui
(t)
例2-2 图示是弹簧-质量-阻尼器机械位移系统。试列写质量 m在外力F(t)作用下,位移x(t)的运动方程。
2.2 控制系统的微分方程
一、建立系统或元件的微分方程的步骤 1、确定系统或元件的输入量和输出量
2、依据各个变量之间遵循的物理或化学定律,列出一组微分方程
3、消去中间变量,写出系统输入和输出变量的微分方程 4、对微分方程进行整理,写成标准形式,即输出量放左边,输入
量放右边,按降幂排列。
例2-1 图示电路,列写微分方程
严格地说,构成控制系统的各类元件的输入变量和输出变量之间都存在 不同程度的非线性特性,
将非线性微分方程在一定条件下转化为线性微分方程的方法,称为非线 性微分方程的线性化
u1 (t)
1 C1
(i1 i2 )dt
uc
(t)
1 C2
i2 (t)dt
消去中间变量 u1 i1 i2
R1C1 R2 C 2
d
2uc (t dt 2
)
+(
R1C1
R2C2
R1C2 )
duc (t) dt
uc
(t)
ur
(t)
该电路是由两个一级RC电路串联而成,后一级RC电路中的电流影响着前 一级RC电路的输出电压 ,这就是负载效应。
的数值,考虑 mL=0 ,并令
K KsKaCm Rai
F f CmCe Ra
可简化为
J
d 2c
dt 2
F
d c
dt
K c
K r
位置随动系统的数学模型是一个二阶线性常系数微分方程
二、非线性微分方程的线性化
能够用线性微分方程描述的系统,称为线性系统。 线性系统的重要性质是满足叠加原理,即具有可加性和齐次性。 对线性系统进行分析和设计时,如果有几个外部输入同时加在系统上,则 可以对各个输入分别处理。可加性和齐次性使线性系统的分析大为简化。
uT (t) Ktm (t)
消去中间变量
Tm
dm (t)
dt
(1
KaKmKt
)m (t)
K a K mur
(t)
例2-7 位置随动系统如图 所示,以手柄给定转角系统的输入,工作机
械的转角为系统的输出,列写系统的微分方程。
桥式电位计
e r c
us Kse
放大器
ua Kaus
m
dm
dt
为输出量
Tm
dm
dt
m
Kmua
K n mc
例2-6 直流调速控制系统如图所示。以给定电压为系统的参考输入,
电动机转速为系统的输出,列写微分方程。 解: e(t) ur (t) uT (t)
ua (t) Kae(t)
Tm
dm (t) dt
m (t)
K mua (t)
电动机
mm Cmia
ea
Ce
dm
dt
ua
La
dia dt
Raia
ea
J
d 2m
dt 2
f
dm
dt
mm mc
电机输入输出方程为
JLa
d 3 m
dt 3
(JRa
fL
a
)
d 2 m
dt 2
( fRa
C
m
Ce
)
d m
dt
Cmua
La
dmc dt
d 3m (t) dt 3
(J m Ra
f
m
La
)
d
2 m (t dt 2
)
(
f m Ra
Cm
Ce
)
dm (t dt
)
Cmua (t)
La
dmc (t) dt
Ramc (t)
这是三阶线性常系数微分方程,描述了电机转 角与电枢电压和负载力矩之间的关系
忽略电枢电感
Jm Ra
d 2m
Ra mc
减速器
c
1
i
m
工作机械
J
Jm
JL i2
f
fm
fL i2
mc=
mL i
消去中间变量
JLa
d 3c
dt 3
(JRa
fL
a
)
d 2c
dt 2
( fRa
C
m
C
e
)
d c
dt
Ks
KaCm i
c
Ks
KaCm i
r
La i2
dmL dt
Ra i2
mL
若忽略 La
ui (t) i1 (t)R1
uo (t) i2 (t)R3 uc (t) [i1(t) i2 (t)]R4
i1
(t)
i2ຫໍສະໝຸດ (t)Cduc (t) dt
uo (t) i2 (t)R3 i1 (t)R2 消去中间变量
R4C
duo (t) dt
uo (t)
R2 R3
R2 R4 R1
粘性摩擦系数
if 励磁回路电流
解: mm (t) Cmia (t)
ea
(t)
Cem (t)
Ce
dm (t)
dt
ua (t)
La
dia (t) dt
Raia (t) ea (t)
mm (t)
mc (t)
fm
dm (t)
dt
Jm
d 2m (t)
dt 2
消去中间变量
J m La
若要消除负载效应,可在两个RC电路之间设置隔离放大器
这时所列写的微分方程为
R1C1 R2 C 2
d
2uc (t dt 2
)
+(
R1C1
R2C2 )
duc (t) dt
uc (t)
ur
(t)
例2-4 有源网络如图所示。列写输出与输入之间的微分方程
解:由运算放大器的基本特 性和克希霍夫定律,列写出 下列方程
dt 2
( fmRa
CmCe
)
dm
dt
Cmua
Ramc
得
Tm
d 2m
dt 2
dm
dt
Kmua
Knmc
其中 Tm J m Ra /( fm Ra CmCe )
K m Cm /( f m Ra CmCe )
K n Ra /( fm Ra CmCe )
若以
解:f--阻尼系数 k--弹性系数 根据牛顿第二定律
式中
F1 (t)
f
dy(t) dt
F2 (t) k y(t)
F(t )
k
m
f
F2
y(t )
F1
整理后
例2-3 列写两级RC电路的微分方程
解:根据克希霍夫定律,可写出下列方程组
ur (t) R1i1(t) u1(t)
u1 (t) R2i2 (t) uc (t)