6自由度随机振动控制算法
6 多自由度体系的微振动
V
x
• 当超过弹性限度后,势能将越来越偏离 谐振势能
F
线性近似
例:单摆
M dV d mgl sin
V mgl 1 cos
• 在较大摆角下,势能不是谐振势 • 在很小的摆角范围,势能近似为 谐振势:
2 4 V mgl 1 cos mgl 2! 4!
第六章 多自由度体系的微振动
本章内容
多自由度的微振动是自然界十分普遍的运动 体系,如:双摆,多原子振动,固体晶格振 动等。本章学习: 多自由度体系谐振动的概念 振动的描述
线性近似
例:弹簧振子。在弹性限度内,势能为 二次函数,力为恢复力
V 1 2 kx
2
F
dV dx
kx
g sin 0 , l l g f t l
• 当力学体系在稳定平衡位置附近做微小 振动,只考虑最低级近似-线性近似, 体系做线性振动 • 稳定平衡:保守体系在稳定平衡位置的 势能有极小值(拉格朗日定理)
一、有限多自由度的线性振动
极值条件:
t
2 2 2
1
0
0
t
2 2
2 2
2
2
2
0 0
0
0
t
2
3
0
2 02 2 0 0
0
2
2 2
2 0 0
2
2 0 2 2 0 0
A B 0 C
关于A,B,C的 代数方程组 “特征值问题”
2
• 在平衡位置(x=0)附近展开:
三轴六自由度闭环虚拟随机振动试验系统建模与仿真
关键词:三轴六自由度;虚拟振动试验系统;振动控制;闭环仿真
中图分类号:V216.2; O324
文献标志码:A
文章编号:1673-1379(2020)05-0428-07
DOI: 10.12126/see.2020.05.002
Modeling and simulation of closed-loop three-axis six-DOF virtual random vibration test system
三轴六自由度闭环虚拟随机振动 试验系统建模与仿真
韩 伟,李敏伟,孙建勇,齐亚超,王克强,马 英
(中国航空综合技术研究所,北京 100028)
摘要:三轴六自由度振动试验实施过程复杂、技术难度大,而虚拟振动试验技术有利于提高振动试
验的试前预示、试后分析能力,优化多输入多输出振动试验系统控制方案,降低试验风险。文章首先结
Keywords: three-axis and six-DOF; virtual vibration test system; vibration control; closed-loop simulation
收稿日期:2020-04-26;修回日期:2020-09-12
引用格式:韩伟, 李敏伟, 孙建勇, 等. 三轴六自由度闭环虚拟随机振动试验系统建模与仿真[J]. 航天器环境工程, 2020, 37(5): 428-434 HAN W, LI M W, SUN J Y, et al. Modeling and simulation of closed-loop three-axis six-DOF virtual random vibration test system[J]. Spacecraft Environment Engineering, 2020, 37(5): 428-434
工件的定位6个自由度
如图13-14所示为常用的几种心轴结构形式。
心轴在机床上的常用 装 夹 方 式 如 图 13-15 所示。
• 当工件既要求定心精度高,又要装卸方便时,常以圆柱 孔在小锥度心轴上定位,如图13-16所示。
如图13-17所示为几种圆锥销的应用示例。其中图13-17a用于 粗基准定位;图13-17b用于精基准定位。
如图13-7所示为三种标准支承钉,其中平头支承钉多用于工件以精基准定位;球 头支承钉和齿纹支承钉适用于工件以粗基准定位,支承钉与夹具体上孔的配合为 H7/r6或H7/n6。若支承钉需经常更换时,可加衬套,其外径与夹具体孔的配合亦 为H7/r6或H7/n6,内径与支承钉的配合为H7/js6。当使用几个A型支承钉(处于 同一平面)时,装配后应一次磨平其工作表面,以保证其等高性要求。
(3) 可调支承 可调支承是指高度可以调节的支承,如图13-10所 示。一个可调支承限制工件一个自由度。。 必须注意, 必须注意 可调支承在一批工件加工之前只调整一次,在同一批工件加
工中,其位置保持不变,作用相当于固定支承,所以,可调支承在调整后必须 可调支承在调整后必须 用锁紧螺母锁紧。 用锁紧螺母锁紧。
一、工件定位的概念及方法
1. 工件定位的概念 在加工之前,使工件在机床或夹具上占据某一正确位置的过程称 为定位 定位;工件定位后将其固定,使其在加工过程中保持定位位置不变 定位 的操作称为夹紧 夹紧;工件定位、夹紧的过程合称为装夹 装夹。 夹紧 装夹 2. 工件定位的方法 (1) 直接找正定位法 在机床上利用划针或百分表等测量工具 (仪器)直接找正工件的位置的方法称为直接找正定位法。如图13-1所
注意: 注意: 底面上布置的三个支承点不能在同一条直线上,且三个支承 点所形成的三角形的面积愈大愈好。侧面上布置的两个支承点所 形成的连线不能垂直于三点所形成的平面,且两点之间的距离愈 远愈好。这就是上述所提到的“合理布置”的含义。 六点定则” “六点定则”可用于任何形状、任何类型的工件,具有普遍性。 如图13-4所示 为盘状工件的定位,底面的三个支承点限制了工件 的、、 三个自由度,外圆柱面上的两个支承点限制了工件的及自 由度,工件圆周槽中的支承点限制了工件的自由度。 根据“六点定则”利用支承点来限制工件自由度时,有时能 够分清哪个支承点限制了工件的哪个自由度,有时分不清哪个支 承点限制了工件的哪一个自由度。 工件在实际定位时,不是用定位支承点,而是用各种不同形 状的定位元件,不同的定位元件限制工件的自由度数是不一样的。
振动分析中常用的计算公式
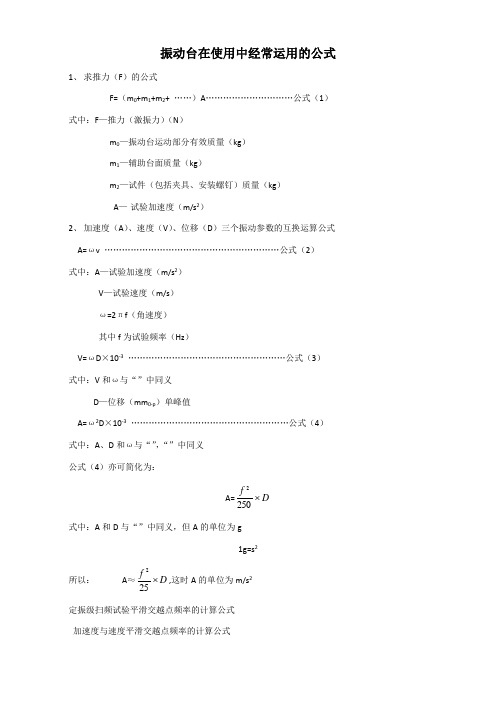
振动台在使用中经常运用的公式1、 求推力(F )的公式F=(m 0+m 1+m 2+ ……)A …………………………公式(1) 式中:F —推力(激振力)(N )m 0—振动台运动部分有效质量(kg ) m 1—辅助台面质量(kg )m 2—试件(包括夹具、安装螺钉)质量(kg )A — 试验加速度(m/s 2)2、 加速度(A )、速度(V )、位移(D )三个振动参数的互换运算公式 A=ωv ……………………………………………………公式(2) 式中:A —试验加速度(m/s 2)V —试验速度(m/s ) ω=2πf (角速度) 其中f 为试验频率(Hz )V=ωD ×10-3 ………………………………………………公式(3) 式中:V 和ω与“”中同义D —位移(mm 0-p )单峰值A=ω2D ×10-3 ………………………………………………公式(4) 式中:A 、D 和ω与“”,“”中同义 公式(4)亦可简化为:A=D f ⨯2502式中:A 和D 与“”中同义,但A 的单位为g1g=s 2所以: A ≈D f ⨯252,这时A 的单位为m/s 2 定振级扫频试验平滑交越点频率的计算公式 加速度与速度平滑交越点频率的计算公式f A-V =VA28.6 ………………………………………公式(5)式中:f A-V —加速度与速度平滑交越点频率(Hz )(A 和V 与前面同义)。
速度与位移平滑交越点频率的计算公式DV f DV 28.6103⨯=- …………………………………公式(6) 式中:D V f -—加速度与速度平滑交越点频率(Hz )(V 和D 与前面同义)。
加速度与位移平滑交越点频率的计算公式f A-D =DA ⨯⨯23)2(10π ……………………………………公式(7) 式中:f A-D — 加速度与位移平滑交越点频率(Hz ),(A 和D 与前面同义)。
根据“”,公式(7)亦可简化为:f A-D ≈5×DAA 的单位是m/s 2 4、 扫描时间和扫描速率的计算公式 线性扫描比较简单:S 1=11V f f H - ……………………………………公式(8) 式中: S1—扫描时间(s 或min )f H -f L —扫描宽带,其中f H 为上限频率,f L 为下限频率(Hz ) V 1—扫描速率(Hz/min 或Hz/s )对数扫频: 倍频程的计算公式n=2Lg f f LgLH ……………………………………公式(9)式中:n —倍频程(oct )f H —上限频率(Hz ) f L —下限频率(Hz )扫描速率计算公式R=TLg f f LgLH2/ ……………………………公式(10)式中:R —扫描速率(oct/min 或)f H —上限频率(Hz ) f L —下限频率(Hz ) T —扫描时间 扫描时间计算公式T=n/R ……………………………………………公式(11)式中:T —扫描时间(min 或s )n —倍频程(oct )R —扫描速率(oct/min 或oct/s )5、随机振动试验常用的计算公式 频率分辨力计算公式:△f=Nf max……………………………………公式(12) 式中:△f —频率分辨力(Hz )f max —最高控制频率 N —谱线数(线数) f max 是△f 的整倍数随机振动加速度总均方根值的计算(1)利用升谱和降谱以及平直谱计算公式 PSD (g 2/Hz)功率谱密度曲线图(a )A 2=W ·△f=W ×(f 1-f b ) …………………………………平直谱计算公式A 1=⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫⎝⎛-+=+⎰111)(m b a b f f ff m fw df f w b ba……………………升谱计算公式 A 1=⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛--=-⎰121112111)(m f f f f m f w df f w ……………………降谱计算公式 式中:m=N/3 N 为谱线的斜率(dB/octive ) 若N=3则n=1时,必须采用以下降谱计算公式A3= lg12f f 加速度总均方根值:g mis=321A A A ++ (g )…………………………公式(13-1)设:w=w b =w 1=Hz f a =10Hz f b =20Hz f 1=1000Hz f 2=2000Hz w a →w b 谱斜率为3dB ,w 1→w 2谱斜率为-6dB利用升谱公式计算得:A 1=5.12010111202.011111=⎥⎥⎦⎤⎢⎢⎣⎡⎪⎭⎫ ⎝⎛-+⨯=⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛-+++m b a b b f f m f w 利用平直谱公式计算得:A 2=w ×(f 1-f b )=×(1000-20)=196利用降谱公式计算得:A 3 =1002000100011210002.0111212111=⎥⎥⎦⎤⎢⎢⎣⎡⎪⎭⎫ ⎝⎛-⨯-⨯=⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛----m f f m f w 度总均方根值公式计算得:g mis=321A A A ++=1001965.1++=利用加速(2) 利用平直谱计算公式:计算加速度总均方根值PSD (g 2/Hz)功率谱密度曲线图(b )为了简便起见,往往将功率谱密度曲线图划分成若干矩形和三角形,并利用上升斜率(如3dB/oct )和下降斜率(如-6dB/oct )分别算出w a 和w 2,然后求各个几何形状的面积与面积和,再开方求出加速度总均方根值g rms =53241A A A A A ++++ (g)……公式(13-2)注意:第二种计算方法的结果往往比用升降谱计算结果要大,作为大概估算可用,但要精确计算就不能用。
三轴六自由度随机振动试验转换矩阵原理及控制方法

第35卷第3期2022年6月振动工程学报Journal of Vibration EngineeringVol.35No.3Jun.2022三轴六自由度随机振动试验转换矩阵原理及控制方法郑荣慧1,徐俊2,陈国平1,孙建勇2,陈怀海1(1.南京航空航天大学机械结构力学及控制国家重点实验室,江苏南京210016;2.中国航空综合技术研究所,北京100028)摘要:分析了三轴六自由度振动系统的加速度特征,建立了振动台试件上任一点的加速度特征表达式,通过引入台体绝对刚性假设,推导得到了输入转换矩阵的表达式。
分析了六自由度振动系统运动所需的六个合力与激振器实际所需施加激振力之间的关系,并给出了输出转换矩阵的推导过程。
给出三轴六自由度随机振动试验控制方法的一般原理与步骤,包括驱动信号生成以及响应信号均衡等。
讨论了两种常见的八激振器配置方案以及传感器的布置方式。
为验证本文的理论和算法,给出了一个三轴六自由度随机振动控制仿真算例。
关键词:随机振动;振动环境试验;六自由度;输入输出转换;多输入多输出中图分类号:O324文献标志码:A文章编号:1004-4523(2022)03-0544-06DOI:10.16385/ki.issn.1004-4523.2022.03.0031概述三轴六自由度随机振动试验是一种先进的振动环境试验方式。
不同于传统的方阵或者长方阵振动控制试验,三轴六自由度随机振动试验可以同时实现沿正交轴向的三个线振动以及绕三个正交轴向转动的角振动环境。
三轴六自由度随机振动试验属于多输入多输出随机振动试验,需要使用基本的多输入多输出振动控制理论。
考虑到几乎没有可用于宽频带的角加速度传感器,因此,目前角加速度的测量是利用线加速度测量结果通过输入变换矩阵转换而来。
三轴六自由度随机振动试验需要使用三轴六自由度振动台系统来实现。
图1展示了美国Hill空军基地的电动式和美国TEAM公司的电液式这两种三轴六自由度振动台系统[1‐2]。
6自由度控制算法

6自由度控制算法在机器人控制与运动规划中,6自由度(6DoF)控制算法是一种常用的方法。
这种算法可以实现对机械臂或机器人的六个自由度进行精确控制,使其在三维空间内能够实现各种复杂的运动轨迹和任务。
6自由度控制算法的核心思想是:通过对机械臂的关节角度进行精确控制,从而实现末端执行器的运动。
一般来说,典型的6自由度机械臂由6个关节组成,每个关节可以控制一个自由度。
常见的机械臂有工业机械臂、服务机器人臂等。
实现6自由度控制的算法可以分为两个主要步骤:逆运动学求解和控制器设计。
逆运动学求解是根据机械臂的末端位姿(位置和姿态),确定关节角度以实现期望运动。
控制器设计是针对不同的任务需求,设计合适的控制策略以保证机械臂的精确控制和稳定性。
在逆运动学求解方面,一种常用的方法是使用解析解法。
对于六自由度的机械臂,可以通过对正运动学方程求逆,从而得到关节角度与末端位姿之间的映射关系。
一般来说,这种方法可以快速计算出关节角度,但对于一些特殊情况(例如奇异构型)可能无法求解解析解,需要使用数值解法来求解逆运动学问题。
在控制器设计方面,常见的方法包括PID控制、基于模型的控制(如轨迹跟踪控制、力/力矩控制)和基于反馈线性化的控制等。
PID控制是一种经典的控制策略,通过调节比例、积分和微分参数,实现机械臂位置和速度的精确控制。
基于模型的控制方法利用机械臂的动力学模型,通过预测机械臂的运动轨迹或实施力/力矩控制来实现精确控制。
而基于反馈线性化的控制方法,则通过设计非线性转换器和线性控制器,将非线性动力学系统转化为线性系统,从而实现控制目标。
除了逆运动学求解和控制器设计,6自由度控制算法还需要考虑如传感器选取与数据融合、路径规划、碰撞检测和碰撞回避等问题。
传感器可以提供机械臂的姿态和位姿信息,用于控制系统的反馈;数据融合则将多个传感器的信息进行整合,提高机械臂的感知能力。
路径规划是将机械臂的运动轨迹优化为最佳路径,以提高运动效率和精确度。
6自由度算法

6自由度算法
6自由度算法是一个在机器人学中常用的概念,它指的是描述机器人在三维空间中的运动的六个自由度。
这六个自由度分别是:平移自由度(x、y、z轴方向上的移动)和旋转自由度(绕x、y、z轴的旋转)。
在机器人的运动控制中,六自由度算法被广泛应用于路径规划、逆运动学求解以及姿态控制等方面。
路径规划是机器人在给定起点和终点的情况下,通过计算合适的路径来实现从起点到终点的移动。
在使用六自由度算法进行路径规划时,机器人需要考虑到其在三维空间中的运动限制,例如避免碰撞障碍物或者避免出现关节超过其可行动范围的情况。
通过合理地选择路径规划算法和使用六自由度算法,机器人可以更加高效地完成路径规划任务。
逆运动学求解是指根据给定的机器人末端执行器的位置和姿态,计算机器人各关节的角度以实现末端执行器的准确位置控制。
在实际应用中,通过使用六自由度算法,机器人可以根据末端执行器的位置和姿态,逆向计算出各关节的角度,并将其应用于机器人的控制系统中,实现精确的位置控制。
姿态控制是指机器人在执行任务过程中,保持特定的末端执行器姿态。
通过使用六自由度算法,机器人可以根据任务要求,计算出合适的关节角度,使得末端执行器保持所需的姿态。
这对于需要精确控制姿态的应用场景,如装配、焊接等任务非常重要。
总的来说,六自由度算法在机器人的运动控制中起到了至关重要的作用。
它能够帮助机器人实现路径规划、逆运动学求解和姿态控制等任务,提高机器人的运动精度和效率。
未来随着机器人技术的不断发展,六自由度算法也将进一步完善和应用于更多的机器人应用场景中,为人们的生产和生活带来更多的便利和效益。
状态空间法求解6自由度运动方程

一、概述状态空间法是一种经典的控制工程方法,它可以用来求解动力学系统的运动方程。
对于多自由度系统而言,状态空间法可以更加直观地描述系统的运动规律,方便进行控制器设计和系统分析。
本文将以6自由度运动方程为例,介绍状态空间法的求解过程。
二、背景知识1. 6自由度运动6自由度运动是指物体在三维空间中具有6个独立的自由度,它们可以分别描述物体的位置和姿态。
这种运动状态下,物体的运动方程相对复杂,需要通过合适的方法进行求解。
2. 状态空间法状态空间法是一种用矩阵和向量表示动力学系统运动方程的方法。
它将系统的状态量表示为向量,将系统的输入和输出表示为矩阵,通过线性代数的方法求解系统的数学模型。
三、状态空间法求解步骤1. 系统建模我们需要根据物体的运动特性建立系统的动力学模型。
对于6自由度运动,可以利用牛顿-欧拉方程或拉格朗日方程进行建模,得到系统的运动方程。
2. 状态量定义将系统的状态量表示为一个状态向量,其中包括物体的位置、速度、加速度和姿态等信息。
3. 定义输入输出系统的输入输出可以表示为矩阵,其中输入是外部施加的力或扭矩,输出是系统的位置和姿态信息。
4. 构建状态方程根据系统的动力学模型和状态量定义,可以建立系统的状态方程。
状态方程描述了系统状态的演变规律,可以用矩阵形式表示为x' = Ax + Bu,其中x'为状态变化率,A为状态转移矩阵,B为输入矩阵,u为外部输入。
5. 构建输出方程根据系统的输出定义,可以建立系统的输出方程。
输出方程描述了系统的输出与状态和输入之间的关系,可以用矩阵形式表示为y = Cx + Du,其中y为系统的输出,C为输出矩阵,D为直接传递矩阵。
6. 求解系统通过线性代数的方法,可以求解状态方程和输出方程,得到系统的数学模型。
这个模型可以用来进行系统分析、控制器设计等工作。
四、实例分析我们以一个飞行器的姿态控制系统为例,介绍状态空间法求解6自由度运动方程的具体步骤。