并联六自由度运动平台
6-UCU并联六自由度平台运动及其控制系统的研究
6-UCU并联六自由度平台运动及其控制系统的研究侯骏飞;曾亿山;鲁军【摘要】以6-UCU并联六自由度平台为研究对象,介绍了六自由度平台的结构及工作原理.利用Solidworks和Ad-ams对六自由度平台进行运动学仿真和分析,得出伺服液压缸的运动特性曲线,验证6-UCU型并联六自由度平台的设计是否合理、准确,对整个六自由度平台的液压系统的安全性及可靠性具有指导作用.通过PID控制器的设计和Simulink仿真,研究了参数变化对系统性能的影响,找出了影响系统性能的关键参数,从而为改进和优化系统方案提供了合理的参考.%As the research object, the structure and the working principle of 6- UCU six degreeoffreedom parallel platform are introduced in this paper. Using Solidworks and Adams for kinematics simulation and analysis of 6-DOF platform, the motion curves of the servo cylinders are gotten to validate the accuracy of the 6-DOF aircraft platform. It plays an important role for the security and reliability of the hydraulic six degrees of freedom system. PID control-ler and simulink simulation are done to study the effect of the change of parameters on system performance. The key parameters are found out, which will affect the system performance. Thus it will provide reasonable references when the system is optimized.【期刊名称】《流体传动与控制》【年(卷),期】2015(000)005【总页数】5页(P11-15)【关键词】6-UCU;并联;六自由度;运动学仿真【作者】侯骏飞;曾亿山;鲁军【作者单位】合肥工业大学机械与汽车工程学院安徽合肥 230009;合肥工业大学机械与汽车工程学院安徽合肥 230009;合肥工业大学机械与汽车工程学院安徽合肥 230009【正文语种】中文【中图分类】TH137.9目前多数的六自由度运动平台都是双端球铰型六自由度平台,而球铰存在着承载能力差,运动间隙大等缺点。
并联六自由度对接平台运动学标定方法研究
高 , 定 后 的 结 构 参 数 完 全 满 足 对 接 平 台 的 精 度 标
要求 。 1 并联 六 自由度 对接 平 台运动 学模 型
在误 差 , 其控制 模 型 中 的参 数 与 其 实 际结 构 的 几 故
何参 数必然 存 在 差异 。 为 了补偿 这 些 误 差 , 必 须 就
型 , 先建 立如 图 2所 示的坐 标 系 : 首 0 为 对接平 台上 支点 所 在 圆 圆 心 ,0 为 丝杆
下 支点所在 圆圆心 。设 0 到 0 的矢量 为 P, 到 0 上支 点 的矢 量 为 0 到 下 支 点 的矢 量 为 , 下
构结 构 复杂 , 置正 解一 般采用 数值方 法 获得 , 在 位 故 此基 础上 建立 的标 定 算法 也 只能 得 到 数值 解 , 且 并
收 稿 日期 :060—0 修 回 日期 :061-8 20 —53 ; 20 —1 0
维普资讯
24 7
宇 航 学 报
第 2 卷 8
图 1 并 联 六 自 由度 运 动平 台 的 结 构 形式
F g. T e 矗a fP DP i 1 h me o S
真验 证 表 明 了所 提 方 法 的有 效 性 和 实 用 性 。
关键 词 :并 联 六 自 由度 对 接 平 台 ;标定 方 法 ;仿 真验 证
中 图 分 类 号 :V 7 . 46 5 文献 标 识 码 : A 文 章 编 号 :0 0 12 (0 7 0 —2 30 10 —3 8 2 0 ) 20 7 .5
支 点 到上支 点 的矢量 为 f( i: 1 … ,), P一 , 6 则
一 一
解 的不 唯一性 是 此种算 法 的重 要 。有 :
六自由度液压平台控制
六自由度液压平台控制摘要:根据六自由度运动平台性能特点,对平台进行了基于位置反解的轨迹规划,并对平台控制系统硬件和软件模块进行了分析,以B&R 可编程控制器为结构设计了六自由度平台运动控制系统。
采用该控制系统,对平台进行了位置跟踪和轨迹跟踪性能测试试验,试验结果证明了模型的正确性及基于模糊神经网络整定的PID控制的工程可行性和有效性,为今后对液压六自由度运动平台的进一步深入研究提供一个便捷高效的平台。
关键词:六自由度;控制系统;运动平台随着自动化技术的发展和自动化程度的不断提高,对液压运动平台系统的稳定性、快速性、准确性、自适应性和鲁棒性等控制品质提出了更高的要求。
一般情况下,传统型控制器如PID控制器、最优化控制器和自适应控制器等就难以得到满意的控制效果;而人工智能型控制器能实现满意的控制效果,这类控制器不依赖于被控系统的精确数学模型,而依赖于人的经验知识,或者依赖于系统的输入与输出之间的非线性映射模型。
迭代学习控制(ILC)就具有人工智能特性,是处理不确定量的一种有效途径,它需要信息少,通用性好,计算方便快速。
1.轨迹规划六自由度平台机构由6个并联设置的伺服液压缸驱动,动感平台的任何一个自由度的运动均会造成6个液压缸的不同运动,所以六自由度平台机构是一个多变量、强耦合的液压伺服系统,各伺服液压缸需要协调一致地动作,机构在运动过程中才不至于产生不稳定和破坏现象。
对于六自由度平台来说,保持某种姿态或实现某种运动实际上是使六自由度平台的六根伺服液压缸跟踪期望轨迹的控制问题。
平台要保持某种姿态或达到什么位置,就必须对其运动轨迹进行规划,因此平台的运动轨迹的规划尤为重要。
并联机构的位姿控制和运动轨迹规划问题实质上都是机构的反解问题,即如何控制驱动杆来实现期望的运动轨迹。
而并联机构的位置反解简单且唯一,把参数化后的位姿曲线方程代入到位置反解中,得到并联机构驱动杆的运动规律,以此来控制各驱动杆就可以使动平台按照期望轨迹运动,因此利用并联机构的运动位置反解方程来规划上平台所期望的复杂的运动位姿是可行的。
六自由度运动平台设计方案
六自由度运动平台设计方案1概述YYPT原理样机用原库房留存的345厂的直流电机作为动力源,直流驱动器及工控机作为控制系统元件,采用VB软件进行控制软件的编制,因设计及器件选型的原因,导致YYPT原理样机,在速度、精度、运动规律上等几个技术指标无法满足原规定的指标要求,现在此基础上进行优化方案的设计。
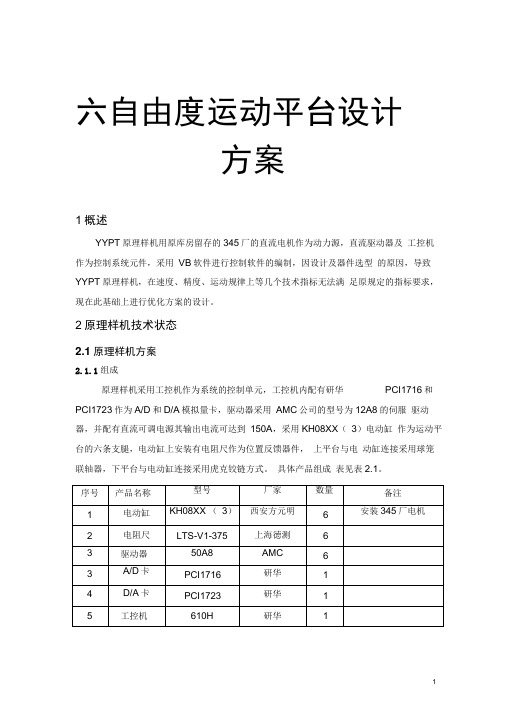
2原理样机技术状态2.1原理样机方案2.1.1组成原理样机采用工控机作为系统的控制单元,工控机内配有研华PCI1716和PCI1723作为A/D和D/A模拟量卡,驱动器采用AMC公司的型号为12A8的伺服驱动器,并配有直流可调电源其输出电流可达到150A,采用KH08XX(3)电动缸作为运动平台的六条支腿,电动缸上安装有电阻尺作为位置反馈器件,上平台与电动缸连接采用球笼联轴器,下平台与电动缸连接采用虎克铰链方式。
具体产品组成表见表2.1。
2.1.2结构方案六自由度运动平台是由六条电动缸通过虎克铰链和球笼万向节联轴器将上、下两个平台连接而成,下平台固定在基础上,借助六条电动缸的伸缩运动,完成上平台在三维空间六个自由度(X,丫,Z,a,B, 丫)的运动,从而可以模拟出各种空间运动姿态。
图1六自由度平台外形图a)球笼联轴器(如图2所示)采用球笼铰链与上平面连接。
球笼铰链结构简单、体积小、运转灵活、易于维护。
初选球笼铰链型号BJB (JB/T6139-1992),公称转矩Tn=2000N/m,工作角度40度,外径D=68mm,轴孔选用圆柱孔d=24mm,总长度L1=148mm ,转动惯量为0.00008kg.m2,重量5kg。
图2球笼联轴器b)虎克铰链(如图3所示)采用虎克铰链与下平面连接。
万向节铰链传动效率高,允许两轴间的角位移大,适用于有大角位移的两轴之间的连接,一般两轴的轴间角最大可达35o~45o,噪音小,对润滑要求不高,传递转矩大,而且使用可靠,因此获得广泛的应用。
图3虎克铰链F固定板的连接(如图4所示)F 固定板与电动缸用法兰连接初选深沟球轴承型号61808 (GB/T276-1994),额定载荷 Cr=5.1kN ,外径D=52mm ,轴承孔选用 d=40mm ,宽 B=7mm ,重量 0.26kg 。
六自由度并联机构设计说明书
(需微要信 swan165本科毕业设计说明书学校代码: 10128 企鹅号: 1663714557 题 目:六自由度伸缩式并联机床结构设计 学生姓名: 学 院:机械学院 系 别:机械系 专 业:机械电子工程 班 级:机电10-4班 指导教师:讲师摘红字要并联系联机微床信,也可叫获取做整套并联结构机床(Parallel Structured Machine Tools)、虚拟轴机床(Virtual Axis Machine Tools),曾经被称为六条腿机床、六足虫(Hexapods)。
并联机床是近年来国内外机床研究的方向,它具有多自由度、刚度高、精度高、传动链短、制造成本低等优点。
但其也不足之处,其中位置正解复杂就是关键的一条。
6-THRT伸缩式并联机床是Stewart 机床的一种变形结构形式,它主要构成是运动和静止的两个平台上的6个关节点分别分布在同一个平面上,且构成的形状相似。
并联机床是一种气动机械,集气(液),在一个典型的机电一体化设备的控制技术,它是很容易实现“六轴联动”,在第二十一世纪将成为主要的高速数控加工设备。
本次毕业设计题目结合本院实验室现有的六自由度并联机床机构进行设计,使其能根据工艺要求进行加工。
提高学生的工程素质、创新能力、综合实践及应用能力。
此次毕业设计的主要内容是对并联机床结构设计,其内容主要包括机器人结构设计总体方案的确定,机器人机构设计的相关计算,以及滚珠丝杠螺母副、步进电机、滚动轴承、联轴器等主要零部件的计算选用,并利用CAXA软件绘制各相关零部件的零件图和总装配图,以期达到能直观看出并联机床实体机构的效果。
关键词:并联机床;步进电动机;空间变换矩阵;滚珠丝杠螺母副AbstractPMT (Parallel Machine Tools), also known as the parallel structure machine (Parallel Structured Machine Tools), Virtual Axis Machine Tool, has also been known as the six-legged machine, six-legged insects (Hexapods).Parallel machine is in recent years the domestic machine tool research hot spot, it has multiple degrees of freedom, high rigidity, high precision, short transmission chain, with low manufacturing cost.But its shortcomings, in which the forward solution of position of a complex is the key. 6-THRT telescopic type parallel machine tool is Stewart machine tools, a deformable structure form, it is the main characteristics of dynamic, static platform on the 6joints are respectively distributed on the same plane, and form the shape similarity.Parallel machine is a mechanical, pneumatic (hydraulic), control technology in one of the typical electrical and mechanical integration equipment. Parallel machine is easy to achieve "six-axis", is expected to become the 21st century, the main high-speed light CNC machining equipment. The combination of hospital laboratory construction project, located six-DOF parallel machine tool sector, so that it can be processed according to process requirements. Improve their engineering quality, innovation, comprehensive practice and application of skills.The main topics for the design of parallel machine tool design, its content includes the determination of robot design, robot design and calculation, and the ball screw pair, stepping motor, bearings, couplings, limit switch, spindle ,and other major components using CAXA software to draw the relevant parts of the parts drawings, and assembly drawings to achieve the parallel machine tool can directly see the effect of physical bodies.Keywords: parallel machine;Six axis linkage;space transformation matrix;ball screw pair目录第一章绪论 (1)1.1 课题的研究背景 (1)1.2 课题研究的意义 (2)1.3 课题的研究内容步骤 (2)1.3.1并联机构介绍 (3)1.3.2并联机床设计类型的选定 (3)1.3.3 并联机床结构设计的相关计算 (4)1.3.4 各零部件与装配图的设计出图 (4)第二章并联机床部件设计与计算 (6)2.1 6-THRT 伸缩式并联机床位置逆解计算与分析 (6)2.1.1 6-THRT并联机器人机械结构简介 (7)2.1.2坐标系的建立 (7)2.1.3 初始条件的确立 (8)2.1.4 空间变换矩阵的求解 (9)2.1.5 新坐标及各轴滑块移动量的计算 (10)2.2 滚珠丝杠螺母副的计算与选型 (12)2.2.1 最大工作载荷的计算 (12)2.2.2 最大动载荷的计算 (13)2.2.3 规格型号的初选 (13)2.2.4 传动效率的计算 (13)2.2.5 刚度的验算 (14)2.2.6 稳定性的校验 (15)2.3 滚动轴承的选用 (15)2.3.1 基本额定载荷 (15)2.3.2 滚动轴承的选择 (16)2.3.3 轴承的校核 (16)2.4 步进电动机的计算与选型 (17)2.4.1 步进电机转轴上总转动惯量的计算 (17)2.4.2 步进电机转轴上等效负载转矩的计算 (18)2.4.3 步进电动机尺寸 (21)2.5 联轴器的选用 (21)第三章并联机床的结构设计 (23)3.1 机床中的并联机构 (23)3.1.1概念设计 (23)3.1.2运动学设计 (23)3.2杆件的配置 (23)3.2.1 杆件设计 (24)3.2.2 伸缩套筒 (25)3.3铰链的设计(虎克铰) (25)3.4机床框架和床身的设计 (26)第四章并联机床的装配出图 (28)4.1 Pro/E软件的概述 (28)4.2 Pro/E的功能 (28)4.3 CAXA电子图版简介 (28)4.4 二维图的绘制处理 (29)第五章并联机床面临的主要技术问题及前景 (30)5.1 引言 (30)5.2机床的关节运动精度问题 (30)5.3 并联机床的未来展望 (31)结论 (32)参考文献 (33)谢辞 (34)第一章绪论1.1 课题的研究背景为了改善生产环境的适应性,满足快速变化的市场需求,近年来制造设备和系统,全球机床制造业正在积极探索和开发新的功能,其中在机床结构技术上的突破性进展当属90年代中期问世的并联机床(Parallel Machine Tools),又称虚(拟)轴机床(Virtual Axis Machine Tool)或并联运动学机器(Parallel Kinematics Machine)[12]。
六自由度平台
六自由度平台简介六自由度平台是一种具有六个自由度的机械装置,用于模拟某种特定的运动或操作。
它由一个固定的基座和一个可运动的平台组成,平台可以在六个方向上进行运动。
这些方向分别是平移运动的x、y和z轴以及旋转运动的绕x、y和z轴。
工作原理六自由度平台的工作原理基于平台上的六个自由度。
通过控制这些自由度的运动,可以实现平台的任意姿态和位置。
六自由度平台通常由六个执行机构组成,每个执行机构负责控制平台上的一个自由度。
这些执行机构可以是液压马达、电动推杆或转动电机等。
通过改变这些执行机构的运动方式和速度,可以控制平台的姿态和位置。
在六自由度平台上,平台和基座之间通常有一个连接机构。
这个连接机构被设计为可以使平台相对于基座在六个方向上运动,并且能够支持所需的载荷。
常见的连接机构包括球接头、万向节等。
六自由度平台在许多领域都有重要的应用。
以下是一些典型的应用领域:航天航空领域在航天航空领域,六自由度平台可以用于模拟和测试航天器和飞行器的运动和操纵。
通过控制平台的自由度,可以模拟各种姿态和操纵条件,以帮助设计和验证飞行器的控制系统。
机器人领域在机器人领域,六自由度平台可以用于模拟和测试机器人的运动和操作。
通过控制平台的自由度,可以模拟各种机器人的运动和操作场景,以帮助设计和验证机器人的运动控制算法。
模拟训练领域在模拟训练领域,六自由度平台可以用于模拟各种训练场景,如飞行模拟器、驾驶模拟器等。
通过控制平台的自由度,可以模拟各种实际场景下的运动和操作,以帮助训练人员提高技能和应对各种情况。
在医疗领域,六自由度平台可以用于模拟和测试医疗设备的运动和操作。
通过控制平台的自由度,可以模拟各种医疗设备的运动和操作,以帮助医生和护士熟悉设备的使用和操作步骤。
总结六自由度平台是一种具有六个自由度的机械装置,通过控制平台的自由度,可以实现平台的任意姿态和位置。
它在航天航空领域、机器人领域、模拟训练领域和医疗领域等许多领域都有广泛的应用。
六自由度并联机器人简介

六自由度并联简介六自由度并联简介1. 引言本文旨在介绍六自由度并联的基本概念、结构设计、运动学和动力学分析等内容。
六自由度并联是一种能够实现六个自由度运动的系统,具有广泛的应用领域,包括工业制造、医疗手术、半导体加工等。
2. 结构设计2.1 结构概述六自由度并联由基座、运动平台和连杆组成。
基座固定在地面上,运动平台通过多个连杆与基座相连,形成六个自由度。
运动平台上还装配有执行器和传感器等设备,用于控制和监测的运动状态。
2.2 连杆设计连杆是连接基座和运动平台的关键部件,其长度和形状对的运动性能有重要影响。
连杆的设计需要考虑运动范围、负载能力和结构强度等因素。
2.3执行器和传感器执行器用于驱动的运动,常见的执行器包括电机和液压缸等。
传感器用于监测的位置、力量和反馈信息,以实现自适应控制和安全保护。
3. 运动学分析3.1 坐标系建立建立的基座坐标系和运动平台坐标系,用于描述的位置和姿态。
3.2 正运动学通过正运动学方程,计算出给定关节变量下的末端位置和姿态。
正运动学方程是解决逆运动学问题的基础。
3.3 逆运动学逆运动学问题是指已知的末端位置和姿态,求解对应的关节变量。
采用数值方法或解析法求解逆运动学问题,以实现精确控制。
4. 动力学分析4.1 质心和惯性参数确定各部件的质量分布和惯性参数,建立动力学模型。
4.2 动力学方程建立的动力学方程,描述在给定控制力和力矩下的运动规律。
动力学方程求解可以实现的动态控制和冲击响应分析。
5. 应用领域6自由度并联在工业制造、医疗手术、半导体加工等领域具有广泛的应用。
通过灵活的运动和高精度的控制,该能够完成复杂的工作任务,并提高生产效率和产品质量。
6. 结束语本文对六自由度并联的结构设计、运动学和动力学分析进行了详细介绍。
希望通过本文的阅读,读者能够对该系统有更深入的了解。
1.本文档涉及附件:本文档附有六自由度并联的结构图、运动学和动力学分析的数学模型和各部件的技术参数表格等。
六自由度运动平台设计方案
六自由度运动平台设计方案1概述YYPT原理样机用原库房留存的345厂的直流电机作为动力源,直流驱动器及工控机作为控制系统元件,采用VB软件进行控制软件的编制,因设计及器件选型的原因,导致YYPT原理样机,在速度、精度、运动规律上等几个技术指标无法满足原规定的指标要求,现在此基础上进行优化方案的设计。
2原理样机技术状态2.1原理样机方案2.1.1组成原理样机采用工控机作为系统的控制单元,工控机内配有研华PCI1716和PCI1723作为A/D和D/A模拟量卡,驱动器采用AMC公司的型号为12A8的伺服驱动器,并配有直流可调电源其输出电流可达到150A,采用KH08XX(3)电动缸作为运动平台的六条支腿,电动缸上安装有电阻尺作为位置反馈器件,上平台与电动缸连接采用球笼联轴器,下平台与电动缸连接采用虎克铰链方式。
具体产品组成表见表2.1。
2.1.2结构方案六自由度运动平台是由六条电动缸通过虎克铰链和球笼万向节联轴器将上、下两个平台连接而成,下平台固定在基础上,借助六条电动缸的伸缩运动,完成上平台在三维空间六个自由度(X,丫,Z,a,B, 丫)的运动,从而可以模拟出各种空间运动姿态。
图1六自由度平台外形图a)球笼联轴器(如图2所示)采用球笼铰链与上平面连接。
球笼铰链结构简单、体积小、运转灵活、易于维护。
初选球笼铰链型号BJB (JB/T6139-1992),公称转矩Tn=2000N/m,工作角度40度,外径D=68mm,轴孔选用圆柱孔d=24mm,总长度L1=148mm ,转动惯量为0.00008kg.m2,重量5kg。
图2球笼联轴器b)虎克铰链(如图3所示)采用虎克铰链与下平面连接。
万向节铰链传动效率高,允许两轴间的角位移大,适用于有大角位移的两轴之间的连接,一般两轴的轴间角最大可达35o~45o,噪音小,对润滑要求不高,传递转矩大,而且使用可靠,因此获得广泛的应用。
图3虎克铰链F固定板的连接(如图4所示)F 固定板与电动缸用法兰连接初选深沟球轴承型号61808 (GB/T276-1994),额定载荷 Cr=5.1kN ,外径D=52mm ,轴承孔选用 d=40mm ,宽 B=7mm ,重量 0.26kg 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
并联六自由度运动平台
1.概述
并联六自由度运动平台通过六个驱动缸(伺服缸或电动缸)的协调伸缩来实现平台在空间六个自由度的运动,即平台沿x、y、z向的平移和绕x、y、z轴的旋转运动(包括垂直、水平、横向、俯仰、侧倾和旋转六个自由度的运动),以及这些自由度的复合运动。
并联六自由度运动平台可用于机器人、飞行模拟器、车辆驾驶模拟器、新型加工机床、及卫星、导弹等飞行器、娱乐业的运动模拟(动感电影摇摆台)、多自由度振动摇摆台的精确运动仿真等。
图0-1:六自由度及其坐标系定义图
我公司通过自行设计、安装调试,并开发控制软件,同时采用进口关键件对并联六自由度运动平台进行研究开发,目前已完成多套六自由度运动平台应用,典型应用有列车风档液压仿真试验台、F1国际赛车运动仿真台、汽车驾驶模拟器、飞机和飞碟运动模拟器、振动谱试验、海浪模拟试验等。
六自由度运动平台的研制,涉及机械、液压、电气、控制、计算机、传感器,空间运动数学模型、实时信号传输处理、图形显示、动态仿真等一系列高科技领域,是液压及控制技术领域的顶级产品。
2.系统组成
2.1液压伺服类
典型的液压式并联六自由度运动平台主要由机械系统、液压系统、控制系统硬件和控制系统软件四部分组成。
机械系统主要包括:承载平台、上下连接铰链、固定座。
液压系统主要包括:泵站系统、伺服阀、驱动器、伺服油缸和阀块管路。
控制系统硬件主要包括:实时处理器、伺服控制单元、信号调理单元、监控单元和泵站控制单元。
控制系统软件包括:实时信号处理单元、实时运算单元、伺服控制和特殊要求处理单元。
2.2 电动伺服类
电动式并联六自由度运动平台则将伺服油缸用电动缸代替,而伺服阀、泵站系统及阀块管路等则相应取消,增
加运动控制单元。
具有系统简洁、响应速度快等优点,是多自由度平台今后重点发展的方向。
3.主要技术参数
以下参数为液压类平台典型值,具体可按用户要求设计制造。
3.1平台主要参数
平台最大负载:静态≥2000KG,动态≥3000KG。
上平台球铰分布园直径1400mm,相邻球心距离157mm;
下平台球铰分布园直径1600mm,相邻球心距离167mm;
伺服缸最小球铰球心距离800mm,最大长度1200mm;(采用Φ63/45~400缸体)。
平台初始高度约700mm。
3.2 泵站技术指标
额定流量:90L/min
最大系统压力:12Mpa;
泵站电机功率:22KW;
空间尺寸:1400×1200×1320
3.3 运动参数
伺服缸运动速度≥200mm/S;有效行程≥400mm。
主要运动参数如下表:
3.4 电动伺服平台
电动伺服平台省去了泵站系统及伺服阀、伺服油缸,而直接用电动缸、伺服电机和相应的伺服放大器代替。
电动缸:电动缸可根据用户要求选用进口(Exlar系列)或国产产品(由本公司自行研发生产,采用进口滚珠丝杠成套)。
伺服电机:伺服电机可选用三菱、安川、松下、台达等产品。
伺服放大器:采用与伺服电机品牌对应的伺服放大器。
4.平台控制系统
4.1 伺服运动控制器
平台控制系统由伺服运动控制器、控制计算机、其配电操作柜等组成。
伺服运动控制器安装在配电操作柜内部,操作柜另配置触屏便于一些基本参数的设置和显示。
伺服运动控制器是六自由度平台控制系统的核心,它是一种高性能闭环实时控制器,集成了高速模拟量采集、高速浮点处理器、高速DA端口,是针对Stewart平台应用的专用控制器。
伺服运动控制器包括相对独立的六组控制回路,对于每组回路由位置控制环组成,它和线性位移传感器、伺服比例阀和伺服缸构成快速高精度数字闭环控制系统,从而使单伺服缸控制稳态误差小于0.1毫米。
4.2 控制系统主要功能:
1) 操作监控计算机,可以进行运动函数编程,与运动控制器接口,完成各种命令和参数设定。
2) 所有输入输出均具有硬件保护电路,具有故障定位和冻结能力。
3)控制器在即使在复杂控制条件下,仍能保证闭环控制周期小于10ms。
4)控制器具有保护算法,当超出模拟台运动范围的指令给出时会发出报警信号并进行运动限制。
5)控制器能自动判断识别非法命令,避免设备误动作。
6)实现泵站的基本起停控制,状态监视。
4.3 数据接口:
伺服运动控制器可以通过Modbus TCP协议与用户控制操作计算机连接,控制器提供上位机应用函数接口,便于第三方应用软件连接。
伺服运动控制器可以通过RS232/485与具有串行通讯能力的设备进行通讯,通讯协议为Modbus RTU 或自行定义的自由协议。
5.主要应用示例
5.1 列车风档液压仿真试验台
列车运动仿真测试系统实现对列车各种工况下的运动轨迹进行计算仿真、模拟运动,同时对列车产品如折棚式风档等进行产品性能测试。
图0-2列车风档液压仿真试验台现场实景图
并联六自由度运动平台
系统能够根据给定的列车轨迹参数,计算出列车运动轨迹及其他相关参数。
列车轨迹计算主要参数如下:
a) S曲线半径R
b) S曲线直线段长度W
c) 平台正三角形边长A
d) 列车长度L
e) 列车轮距N
f) 连杆长度P
g) 连杆绞点至轮轴距M
h) 列车速度v
图0-3列车风档液压仿真试验台HMI界面
试验台能够仿真如下运动轨迹:
a)含直线段S曲线水平运动
b)园曲线水平运动
c)切园曲线水平运动
d)含直线段S曲线垂直运动
e)园曲线垂直运动
f)切园曲线垂直运动
g)翻转运动
h)混合运动
5.2 F1赛车运动仿真台
F1赛车运动仿真台用于上海F1国际赛车场,操作者可以坐到仿真平台上,平台前方放置一液晶显示屏,显示赛车动画场景,操作者可以通过操纵杆进行起动、加速、左右拐、侧滑、刹车、颠簸行使等动作,同时仿真台根据这些动作进行动态模拟,让操作者亲身体验赛车动感。
图0-4 F1赛车运动仿真台现场实景图
F1赛车运动仿真台为六自由度运动平台的开发应用,主要由计算机操作动画系统、六
缸液压伺服运动系统和实时控制系统组成。
计算机操作动画系统采用高性能服务器主机与34”液晶显示屏,动态模拟赛车场景。
六缸液压伺服运动系统采用进口比例伺服阀控制,频响时间小于20ms,液压缸内置高精度位移传感器。
另单独配有提供动力的泵站单元。
实时控制系统根据计算机系统的动作指令信号动态运算并调节控制液压缸动作,实现与动画场景动作同步。
5.3 特种机车驾驶模拟器
特种机车驾驶模拟器主要由六自由度平台、实物驾驶室、模型小车、地貌沙盘、视景影像系统等组成。
实现了特种机车驾驶视觉、听觉、操纵、环境、不同路况、不同气候等的综合模拟。
实物驾驶室内主要部件如档位、方向盘、仪表板、座椅等均采用实车部件。
方向盘力矩按实车模拟,力求在操纵上有实车感觉。
图0-5特种机车驾驶模拟器现场实景图
模型小车按照实物驾驶室内发出的各种指令(加减速、左右转向、刹车、颠簸等),在地貌沙盘上行驶,同时将地貌状况传输给影像虚拟场景系统,模型小车实际空间坐标参数(中心点空间位置X,Y,Z及欧拉夹角α,β,γ)反馈给六自由度控制器,控制系统计算并仿真出模型小车实际动感状态。
5.4 海浪模拟器
六自由度平台可以模拟海浪动作,以验证舰艇、船舶等在实际航行时的各项参数指标。
图0-6海浪模拟器现场实景图
5.5 飞机和飞碟模拟器
飞机和飞碟模拟器主要应用于娱乐行业,如科技馆、游乐场等。
可以模拟飞行器的空中各种飞行姿态,辅以空间魔幻场景,给人一种身临其境的美感。
图0-7飞机模拟现场实景图
图0-8飞碟模拟现场实景图。