matlab仿真脉冲多卜勒雷达的信号处理分析
matlab仿真脉冲多卜勒雷达信号处理

matlab仿真脉冲多卜勒雷达的信号处理目录目录-------------------------------------------------------- 1 第一章绪论-------------------------------------------------- 31.1 雷达起源 ---------------------------------------------- 31.2 雷达的发展历程 --------------------------------------- 4 第二章原理分析----------------------------------------------- 62.1 匹配滤波器原理 --------------------------------------- 62.2 线性调频信号(LFM) ---------------------------------- 82.3 LFM信号的脉冲压缩----------------------------------- 10 第三章多目标线性调频信号的脉冲压缩------------------------- 14 第四章仿真结果分析------------------------------------------ 164.1 时域图分析 ------------------------------------------ 164.2 回波信号频域图分析 ---------------------------------- 174.3 压缩信号图分析 -------------------------------------- 194.4 多目标压缩信号图分析 -------------------------------- 21 第五章问题回答--------------------------------------------- 23 第六章致谢与总结------------------------------------------- 24 附录(Matlab程序)------------------------------------------ 25第一章绪论1.1 雷达起源雷达的出现,是由于二战期间当时英国和德国交战时,英国急需一种能探测空中金属物体的雷达(技术)能在反空袭战中帮助搜寻德国飞机。
Matlab在雷达信号处理和雷达成像中的应用

Matlab在雷达信号处理和雷达成像中的应用随着科技的不断发展,雷达技术在军事、航空、天文等领域扮演着非常重要的角色。
而在雷达的研究和应用中,数据的处理和成像是至关重要的环节。
Matlab作为一款强大的数学软件,被广泛应用于雷达信号处理和雷达成像的领域。
本文将探讨Matlab在雷达信号处理和雷达成像中的具体应用。
一、雷达信号处理1. 信号预处理雷达接收到的信号常常受到多种干扰,例如噪声、杂波等。
Matlab提供了丰富的信号预处理函数和工具箱,可以对雷达信号进行滤波、降噪、去除杂波等操作。
其中,滤波操作可以通过FIR、IIR滤波器实现,而降噪操作可以通过小波分析等方法实现。
Matlab的强大计算能力和可视化功能使得信号预处理更加高效准确。
2. 目标检测雷达信号中的目标通常表现为一些特征突出的信号,例如脉冲幅度、脉冲宽度等。
通过对这些特征进行分析和处理,可以实现雷达信号中目标的检测和定位。
Matlab提供了一系列的目标检测算法和函数,如常用的卡尔曼滤波、最小二乘法等。
通过对雷达信号进行预处理和目标检测,可以提高雷达系统的性能和准确度。
3. 距离测量雷达系统通过测量目标与雷达之间的回波时间来实现距离的测量。
Matlab提供了丰富的信号处理函数和工具,可以实现对回波信号的采样、分析和测量。
通过对回波信号进行FFT、相关分析等处理,可以精确地测量目标与雷达之间的距离。
二、雷达成像1. 合成孔径雷达成像合成孔径雷达(SAR)是一种基于合成孔径技术的雷达成像方法,可以利用雷达的运动和信号处理来实现高分辨率的雷达图像。
Matlab提供了完善的SAR成像算法和工具箱,可以实现SAR数据的处理、成像和评估。
通过对SAR数据进行范围压缩、方位压缩和图像重建,可以获得高质量的SAR图像。
2. 多普勒处理雷达在接收回波信号时,目标的运动会引起回波频率的改变,这被称为多普勒效应。
多普勒处理是雷达成像的重要环节之一。
Matlab提供了多普勒处理的算法和函数,例如多普勒频谱分析和多普勒滤波等。
脉冲多普勒雷达matlab
脉冲多普勒雷达matlab脉冲多普勒雷达是一种广泛应用于军事、民用和科学研究领域的雷达系统。
它可以通过测量目标的速度和距离来实现目标检测和跟踪。
而matlab作为一种强大的数学计算软件,可以帮助我们更加高效地进行雷达信号处理和分析。
一、脉冲多普勒雷达的原理脉冲多普勒雷达的工作原理是通过发射一系列短脉冲信号,然后接收反射回来的信号,并通过信号处理来提取目标的速度和距离信息。
其中,多普勒效应是实现速度测量的关键。
当目标相对于雷达运动时,反射回来的信号会发生多普勒频移,通过测量这个频移可以得到目标的速度信息。
二、matlab在脉冲多普勒雷达中的应用matlab作为一种强大的数学计算软件,可以帮助我们更加高效地进行雷达信号处理和分析。
在脉冲多普勒雷达中,matlab可以用于以下方面:1. 信号处理脉冲多普勒雷达接收到的信号通常包含噪声和杂波,需要进行信号处理来提取目标信息。
matlab提供了丰富的信号处理工具箱,可以帮助我们进行滤波、去噪、谱分析等操作,从而提高信号的质量和可靠性。
2. 目标检测和跟踪脉冲多普勒雷达需要对接收到的信号进行目标检测和跟踪。
matlab提供了多种目标检测和跟踪算法,如CFAR、MTI、MUSIC等,可以帮助我们实现自动化目标检测和跟踪。
3. 数据可视化matlab可以帮助我们将雷达接收到的信号进行可视化,以便更好地理解和分析数据。
通过matlab的绘图工具,我们可以绘制出目标的距离-速度图、功率谱密度图等,从而更加直观地了解目标的特征和运动状态。
三、结语脉冲多普勒雷达是一种重要的雷达系统,它在军事、民用和科学研究领域都有广泛的应用。
而matlab作为一种强大的数学计算软件,可以帮助我们更加高效地进行雷达信号处理和分析。
通过matlab的信号处理工具、目标检测和跟踪算法以及数据可视化功能,我们可以更加准确地提取目标信息,从而实现更加精确的目标检测和跟踪。
matlab 脉冲积累多普勒速度
matlab 脉冲积累多普勒速度脉冲积累多普勒速度(MATLAB)脉冲积累多普勒速度是一种用于雷达信号处理的技术,可以有效地提取目标的速度信息。
MATLAB作为一种强大的数学计算软件,被广泛应用于雷达信号处理和多普勒速度估计方面。
本文将介绍如何使用MATLAB实现脉冲积累多普勒速度算法,并结合实例进行详细讲解。
一、脉冲积累多普勒速度算法简介脉冲积累多普勒速度算法是一种基于脉冲多普勒雷达测速原理的信号处理方法。
它通过对多个脉冲信号进行累积平均,以提高测量目标速度的精度和信噪比。
该算法主要包括以下几个步骤:1. 数据采集和预处理:使用雷达设备采集原始信号,并进行滤波和去噪处理,以提高信号质量和减小背景噪声。
2. 多普勒频移计算:利用FFT算法对经过预处理的信号进行频域分析,得到多普勒频移信息,即目标物体相对于雷达的速度信息。
3. 脉冲积累:将多次脉冲信号进行累积平均,以提高信噪比和测速精度。
4. 速度估计:根据脉冲积累后得到的多普勒频移信息,计算目标的速度。
二、MATLAB实现脉冲积累多普勒速度算法下面我们将以一个简单的示例来演示如何使用MATLAB实现脉冲积累多普勒速度算法。
假设我们已经完成了数据采集和预处理的操作,得到了经过滤波和去噪后的雷达信号。
首先,我们需要进行频域分析,计算出信号的多普勒频移信息。
在MATLAB中,可以使用fft函数来进行频域分析。
假设待分析信号为x,采样频率为Fs,我们可以使用以下代码进行频域分析:```matlabX = fft(x);f = (-Fs/2):(Fs/length(x)):(Fs/2)*(1-1/length(x)); % 构造频率坐标轴```接下来,我们需要进行脉冲积累操作。
假设我们积累N次脉冲信号,可以使用以下代码进行脉冲积累:```matlabN = 10; % 脉冲积累次数X_acc = zeros(size(X)); % 初始化累加变量for i = 1:NX_acc = X_acc + X; % 累加每次脉冲的频域信息endX_avg = X_acc / N; % 计算平均频域信息```最后,我们可以根据平均频域信息计算目标的速度。
基于MATLAB的雷达数字信号处理

完成相参积累后,形成“距离-多普勒”二维分布图。对该二维分布图取模值处理后, 形成 CFAR(恒虚警)平面,若回波中存在目标信号,则二维分布图上会出现目标尖峰,
频率不同而以,因此,MATLAB 仿真时,只需考虑 S(t)。以下 MATLAB 程序产生 1.4
式的 chirp 信号,并作出其时域波形和幅频特性,如图 2 所示。
2
线性调频信号
0.5
0
-0.5
-1
-5 -4 -3 -2 -1
0
1
2
3
4
5
Time in u sec
线性调频信号的幅频特性
40
30
20
5. 目标信息提取处理
本文介绍的雷达系统采用单脉冲体制,具备精密跟踪的能力。每发射一个脉冲, 天线能同时形成若干个波束,将各波束回波信号的振幅和相位进行比较,当目标位于 天线轴线上时,各波束回波信号的振幅和相位相等,信号差为零;当目标不在天线轴 线上时,各波束回波信号的振幅和相位不等,产生信号差,驱动天线转向目标直至天 线轴线对准目标,这样可测出目标的方位角与俯仰角。从各波束接收的信号之和,可 测出目标的距离,从而实现对目标的测量和跟踪功能。单脉冲雷达已经广泛应用,在 军事上主要用于目标识别、靶场精密跟踪测量、导弹预警和跟踪、导弹再入弹道测量、 火箭和卫星跟踪、武器火力控制、炮位侦查、地形跟随、导航、地图测绘等,在民用 上主要用于交通管制。
sin K (T t)t e j2 fct Kt
合并 2.4 和 2.5 两式:
雷达信号处理的MATLAB仿真

11目录1. 设计的基本骤 (1)1.1 雷达信号的产生 (1)1.2 噪声和杂波的产生 (1)2. 信号处理系统的仿真 (1)2.1 正交解调模块 (2)2.2 脉冲压缩模块.................................................2.3 回波积累模块.................................................2.4 恒虚警处理(CFAR)模块 (4)结论 (11)1 设计的基本骤雷达是通过发射电磁信号,再从接收信号中检测目标回波来探测目标的。
再接收信号中,不但有目标回波,也会有噪声(天地噪声,接收机噪声);地面、海面和气象环境(如云雨)等散射产生的杂波信号;以及各种干扰信号(如工业干扰,广播电磁干扰和人为干扰)等。
所以,雷达探测目标是在十分复杂的信号背景下进行的,雷达需要通过信号处理来检测目标,并提取目标的各种信息,如距离、角度、运动速度、目标形状和性质等。
图3-6 设计原理图2 信号处理系统的仿真雷达信号处理的目的是消除不需要的信号(如杂波)及干扰,提取或加强由目标所产生的回波信号。
雷达信号处理的功能有很多,不同的雷达采用的功能也有所不同,本文是对某脉冲压缩雷达的信号处理部分进行仿真。
一个典型的脉冲压缩雷达的信号处理部分主要由A/D 采样、正交解调、脉冲压缩、视频积累、恒虚警处理等功能组成。
因此,脉冲压缩雷达信号处理的仿真模型.2.1 正交解调模块雷达中频信号在进行脉冲压缩之前,需要先转换成零中频的I、Q 两路正交信号。
中频信号可表示为:0()()cos(2())IF f t A t f t t πϕ=+ (3.2)式(3.2)中, f 0 为载波频率。
令:00()()cos 2()sin 2IF f t I t f t Q t f t ππ=- (3.3)则00()()cos 2()sin 2IF f t I t f t Q t f t ππ=- (3.4)在仿真中,所有信号都是用离散时间序列表示的,设采样周期为T ,则中频信号为f IF (rT ) ,同样,复本振信号采样后的信号为f local =exp(?j ω 0rT ) (3.5)则数字化后的中频信号和复本振信号相乘解调后,通过低通滤波器后得到的基带信号f BB (r ) 为:11000{()cos()}(){()sin()}()N N BB IF IF n nf f r n r n T h n j f r n r n T h n ωω--==-----∑∑ (3.6)式(3.6)中, h (n ) 是积累长度为N 的低通滤波器的脉冲响应。
雷达信号matlab仿真剖析
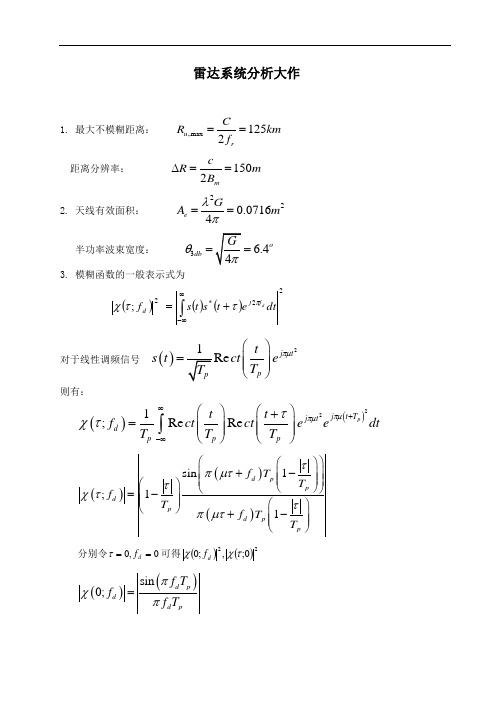
雷达系统分析大作1. 最大不模糊距离: ,max 1252u rC R km f == 距离分辨率: 1502mcR m B ∆== 2. 天线有效面积: 220.07164e GA m λπ==半功率波束宽度:3 6.4o dbθ==3. 模糊函数的一般表示式为()()()22*2;⎰∞∞-+=dt e t s t s f d f j d πττχ 对于线性调频信号 ()21Re j t p t s t ct e T πμ⎛⎫= ⎪ ⎪⎝⎭则有:()()221;Re Re p j t T j t d ppp t t f ct ct e e dt T T T πμπμτχτ∞+-∞⎛⎫⎛⎫+=⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭⎰ ()()()sin 1;11d p p d p d p p f T T f T f T T τπμττχττπμτ⎛⎫⎛⎫+- ⎪⎪ ⎪ ⎪⎛⎫⎝⎭⎝⎭=- ⎪ ⎪⎛⎫⎝⎭+-⎪ ⎪⎝⎭分别令0,0==d f τ可得()()220;,;0τχχd f()()sin 0;d p d d pf T f f T πχπ=()sin 1;011p p p p p T T T T T τπμττχττπμτ⎛⎫⎛⎫-⎪ ⎪ ⎪ ⎪⎛⎫⎝⎭⎝⎭=- ⎪ ⎪⎛⎫⎝⎭- ⎪ ⎪⎝⎭程序代码见附录1的T_3.m, 仿真结果如下:4. 程序代码见附录1的T_4.m, 仿真结果如下:通过比较得知,加窗后的主副瓣比变大,副瓣降低到40db以下,但主瓣的宽度却增加了,约为未加窗时的1.5倍,主瓣也有一定的损失。
5.由雷达方程22134(4)tPG TeSNRKT LFRλσπ=计算可得1196.5540logSNR R=- db作图输出结果如下,程序代码见附录1的T_5.m在R=70km 时,计算得单个脉冲的SNR 1=2.7497 db,要达到要求的检测性能则需要12.5dB 的最小检测输入信噪比,而M 个相参脉冲积累可以将信噪比提高M 倍, 故10)1(SNR D M ==9.4413因此要达到要求就需要10个以上的相参脉冲进行积累。
脉冲多普勒雷达matlab
脉冲多普勒雷达matlab脉冲多普勒雷达是一种广泛应用于军事、天文、大气科学、气象等领域的电磁波测量技术。
它通过发送一定频率的脉冲信号,并对返回信号进行处理,可以获取目标的信息,如位置、速度、加速度等。
本文将介绍脉冲多普勒雷达的原理和在MATLAB中的实现。
一、脉冲多普勒雷达的原理脉冲多普勒雷达是一种主动雷达,它通过发送脉冲信号,利用目标回波信号的时间差和频率差来测量目标的距离、速度和加速度等信息。
其信号处理过程主要包括以下几个步骤:1. 发送脉冲信号脉冲多普勒雷达发送的脉冲信号通常是一段短时间内的高功率信号,一般情况下可以用正弦函数表示,即:s(t) = A·sin(2πfct)其中,A表示信号的幅度,fc为信号的载频,t为时间。
2. 接收回波信号经过一段时间后,脉冲信号会被目标反射,形成回波信号并被多普勒雷达接收。
多普勒雷达接收到的回波信号会包含有目标的信息,但由于信号在传输过程中会受到一些干扰和衰减,因此需要对信号进行处理,以得到目标信息。
首先,通过信号处理技术可以提取出回波信号中的目标信号,即目标的距离信息。
然后,可以利用多普勒效应来提取目标的速度信息。
多普勒效应是指当观察者和目标相对运动时,目标回波信号的频率会发生变化。
具体来说,当目标朝着多普勒雷达运动时,回波信号的频率高于原始信号的频率;而当目标远离多普勒雷达时,回波信号的频率低于原始信号的频率。
因此,在脉冲多普勒雷达中,可以通过测量回波信号的频率差来计算目标的速度。
对于进行速度测量,一般会采用FFT变换的方法进行频域处理,即把回波信号转换到频域,然后通过计算频率谱来得到目标的速度信息。
频率谱可以使用MATLAB中的fft函数快速计算得到。
4. 计算目标加速度除了可以得到目标的距离和速度信息外,通过对速度信号再次求导,可以得到目标的加速度信息。
因此,可以通过进一步处理速度信号来计算目标的加速度。
在MATLAB中,可以使用diff函数对速度信号进行差分计算,得到相邻速度值之间的差异,再次差分求得目标的加速度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
matlab仿真脉冲多卜勒雷达的信号处理目录目录-------------------------------------------------------- 1 第一章绪论-------------------------------------------------- 31.1 雷达起源 ---------------------------------------------- 31.2 雷达的发展历程 --------------------------------------- 4 第二章原理分析----------------------------------------------- 62.1 匹配滤波器原理 --------------------------------------- 62.2 线性调频信号(LFM) ---------------------------------- 82.3 LFM信号的脉冲压缩----------------------------------- 10 第三章多目标线性调频信号的脉冲压缩------------------------- 14 第四章仿真结果分析------------------------------------------ 164.1 时域图分析 ------------------------------------------ 164.2 回波信号频域图分析 ---------------------------------- 174.3 压缩信号图分析 -------------------------------------- 194.4 多目标压缩信号图分析 -------------------------------- 21 第五章问题回答--------------------------------------------- 23 第六章致谢与总结------------------------------------------- 24 附录(Matlab程序)------------------------------------------ 25第一章绪论1.1 雷达起源雷达的出现,是由于二战期间当时英国和德国交战时,英国急需一种能探测空中金属物体的雷达(技术)能在反空袭战中帮助搜寻德国飞机。
二战期间,雷达就已经出现了地对空、空对地(搜索)轰炸、空对空(截击)火控、敌我识别功能的雷达技术。
二战以后,雷达发展了单脉冲角度跟踪、脉冲多普勒信号处理、合成孔径和脉冲压缩的高分辨率、结合敌我识别的组合系统、结合计算机的自动火控系统、地形回避和地形跟随、无源或有源的相位阵列、频率捷变、多目标探测与跟踪等新的雷达体制。
后来随着微电子等各个领域科学进步,雷达技术的不断发展,其内涵和研究内容都在不断地拓展。
目前,雷达的探测手段已经由从前的只有雷达一种探测器发展到了雷达、红外光、紫外光、激光以及其他光学探测手段融合协作。
当代雷达的同时多功能的能力使得战场指挥员在各种不同的搜索/跟踪模式下对目标进行扫描,并对干扰误差进行自动修正,而且大多数的控制功能是在系统内部完成的。
自动目标识别则可使武器系统最大限度地发挥作用,空中预警机和JSTARS这样的具有战场敌我识别能力的综合雷达系统实际上已经成为了未来战场上的信息指挥中心。
雷达(Radar)是英文“Radio Detection and Ranging”缩写的译音,意思是无线电检测和定位。
近年来更广义的Radar的定义为:利用电磁波对目标检测/定位/跟踪/成像/识别。
雷达是战争中关键的侦察系统之一,它提供的信息是决策的主要基础。
雷达可用于战区侦察,也可用于战场侦察。
装有雷达导引头的导弹、灵巧炸弹能精确地、有效地杀伤目标。
在反洲际弹道导弹系统,反战术弹道导弹系统中,雷达是主要的探测器。
雷达技术在导航、海洋、气象、环境、农业、森林、资源勘测、走私检查等方面都起到了重要作用。
1.2 雷达的发展历程雷达技术首先在美国应用成功。
美国在1922年利用连续波干涉雷达检测到木船,1933年6月利用连续波干涉雷达首次检测到飞机。
该种雷达不能测距。
1934年美国海军开始发展脉冲雷达。
英国于1935年开始研究脉冲雷达,1937年4月成功验证了CH(Chain Home)雷达站,1938年大量的CH雷达站投入运行。
英国于1939年发展飞机截击雷达。
1940年由英国设计的10cm波长的磁控管由美国生产。
磁控管的发展是实现微波雷达的最重要的贡献。
1940年11月,美国开发微波雷达,在二次世界大战末期生产出了10cm的SCR-584炮瞄雷达,使高射炮命中率提高了十倍。
二战中,俄、法、德、意、日等国都独立发展了雷达技术。
但除美国、英国外,雷达频率都不超过600MHz。
二战中,由于雷达的很大作用,产生了对雷达的电子对抗。
研制了大量的对雷达的电子侦察与干扰设备,并成立了反雷达特种部队。
二战后,特别是五、六十年代,由于航空航天技术的飞速发展,用雷达探测飞机、导弹、卫星、以及反洲际弹道导弹的需要,对雷达提出了远距离、高精度、高分辨率及多目标测量的要求,雷达进入蓬勃发展阶段,解决了一系列关键性问题:脉冲压缩技术、单脉冲雷达技术、微波高功率管、脉冲多卜勒雷达、微波接收机低噪声放大器(低噪声行波管、量子、参量、隧首二极管放大器等)、相控阵雷达。
七十至九十年代,由于发展反弹道导弹、空间卫星探测与监视、军用对地侦察、民用环境和资源勘测等的需要,推动了雷达的发展。
出现了合成孔径雷达(SAR),高频超视距雷达(OTHR),双/多基地雷达,超宽带(UWB)雷达,逆合成孔径雷达(ISAR),干涉仪合成孔径雷达(InSAR),综合脉冲与孔径雷达等新技术新体制。
早期的雷达天线是固定的、无方向的阵列,只有距离信息。
天线在一定的时间间隔内发射射频脉冲,将接收到的回波放大,并在示波器的CRT 上显示(即常称的A显示),产生一个与目标位置对应的水平线,供雷达操作员识别目标的大致距离。
但由于当时所用的射频电波频率较低,为了有效地发射和接收射频信号,雷达系统需要一个很大的天线,这种天线不能迁移或者改变方向,而且只能探测到大目标,且距离信息的精度也很低。
到二战结束时,雷达系统中那些现在熟悉的特征—微波频率、抛物面天线和PPI显示,已建立起来。
第二章 原理分析2.1 匹配滤波器原理在输入为确知加白噪声的情况下,所得输出信噪比最大的线性滤波器就是匹配滤波器,设一线性滤波器的输入信号为)(t x :)()()(t n t s t x +=其中:)(t s 为确知信号,)(t n 为均值为零的平稳白噪声,其功率谱密度为2/No 。
设线性滤波器系统的冲击响应为)(t h ,其频率响应为)(ωH ,其输出响应:)()()(t n t s t y o o +=输入信号能量:∞<=⎰∞∞-dt t s s E )()(2 输入、输出信号频谱函数:dt e t s S t j ⎰∞∞--=ωω)()( )()()(ωωωS H S o =ωωωπωωd e S H t s t j o ⎰∞-=)()(21)(输出噪声的平均功率:ωωωπωωπd P H d P t n E n n o o ⎰⎰∞∞-∞∞-==)()(21)(21)]([22)()()(21)()(2122ωωωπωωπωωd P H d e S H SNR n t j o o ⎰⎰∞∞-∞∞-=利用Schwarz 不等式得:ωωωπd P S SNR n o ⎰∞∞-≤)()(212上式取等号时,滤波器输出功率信噪比o SNR 最大取等号条件:ot j n e P S H ωωωαω-=)()()(* 当滤波器输入功率谱密度是2/)(o n N P =ω的白噪声时,MF 的系统函数为:,)()(*o t j e kS H ωωω-=oN k α2= k 为常数1,)(*ωS 为输入函数频谱的复共轭,)()(*ωω-=S S ,也是滤波器的传输函数 )(ωH 。
os o N E SNR 2= Es 为输入信号)(t s 的能量,白噪声)(t n 的功率谱为2/o N o SNR 只输入信号)(t s 的能量Es 和白噪声功率谱密度有关。
白噪声条件下,匹配滤波器的脉冲响应:)()(*t t ks t h o -=如果输入信号为实函数,则与)(t s 匹配的匹配滤波器的脉冲响应为: )()(t t ks t h o -=k 为滤波器的相对放大量,一般1=k 。
匹配滤波器的输出信号:)()(*)()(o o o t t kR t h t s t s -==匹配滤波器的输出波形是输入信号的自相关函数的k 倍,因此匹配滤波器可以看成是一个计算输入信号自相关函数的相关器,通常k =1。
2.2 线性调频信号(LFM )LFM 信号(也称Chirp 信号)的数学表达式为:)2(22)()(t kt f j c e T t rectt s +=π (2.1)式中c f 为载波频率,()t rect T为矩形信号,11()0,t t rect T T elsewise ⎧ , ≤⎪=⎨⎪ ⎩ B K T=,是调频斜率,于是,信号的瞬时频率为()22c T T f Kt t + -≤≤,如图1图1 典型的chirp 信号(a )up-chirp(K>0)(b )down-chirp(K<0)将2.1式中的up-chirp 信号重写为:2()()c j f t s t S t eπ= (2.2)当TB>1时,LFM 信号特征表达式如下: )(2)(Bf f rect k S c f LFM -= 4)()(πμπφ+-=c f LFM f f 2()()j Kt t S t rect e T π= (2.3)对于一个理想的脉冲压缩系统,要求发射信号具有非线性的相位谱,并使其包络接近矩形;其中)(t S 就是信号s(t)的复包络。
由傅立叶变换性质,S(t)与s(t)具有相同的幅频特性,只是中心频率不同而已。
因此,Matlab 仿真时,只需考虑S(t)。
以下Matlab 程序产生2.3式的chirp 信号,并作出其时域波形和幅频特性,如图:图2:LFM 信号的时域波形和幅频特性2.3 LFM 信号的脉冲压缩窄脉冲具有宽频谱带宽,如果对宽脉冲进行频率、相位调制,它就可以具有和窄脉冲相同的带宽,假设LFM 信号的脉冲宽度为T ,由匹配滤波器的压缩后,带宽就变为τ,且1≥=D T τ,这个过程就是脉冲压缩。
信号)(t s 的匹配滤波器的时域脉冲响应为:)()(*t t s t h o -= (3.1)0t 是使滤波器物理可实现所附加的时延。