FIR系统网络结构
iir和fir基本结构

x[k]
b0
w[k]
y[k ]
z 1
b1
a1
z 1
z 1
b2
z 1
a2
z 1
a N 1 z 1
z 1
bN
aN z 1
直接 II 型结构
x[k]
x[k]
a1
a1
z 1
z 1
aa2 2
z 1
z 1
aaNN1z1z1 1
aaNN zz1 1
b0
z 1
b1b0
b1
z 1 b2b2 z1
k 0
z 1
z 1
z 1
1
1
1
z 1
z 1
1 z 1
z 1 1
h[0]
h[1]
h[2]
y[k]
h[ M 3] h[ M 1]
2
2
相同系数的共用乘法器,只需(M+1) /2个乘法器
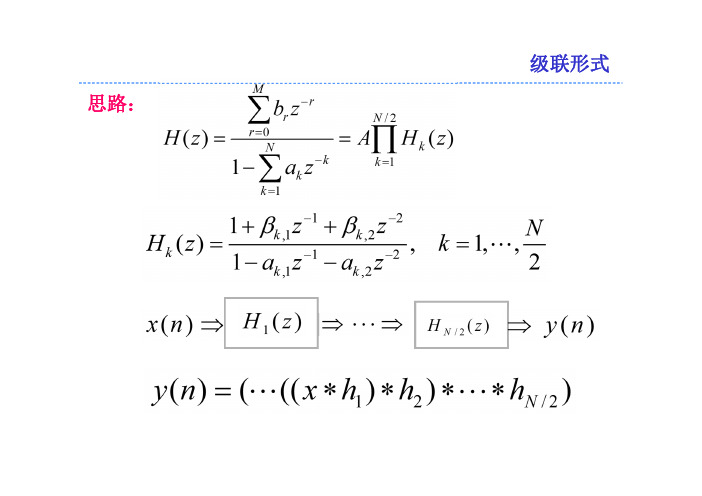
三、 FIR 数字滤波器的级联型结构
将H(z)分解为若干个实系数一阶二阶因子相
乘
L
H (z) h[0] (1 1,k z 1 2,k z 2 )
j 1
w[k] b0 x[k] b1x[k 1] bN x[k M ]
y[k] w[k] a1x[k 1] a2 x[k 2] aN x[k N ]
直接 I 型结构
设M=N w[k] b0 x[k] b1x[k 1] bN x[k N ] y[k] w[k] a1x[k 1] a2 x[k 2] aN x[k N ]
第5章 数字滤波器的基本结构
IIR数字滤波器的基本结构 FIR数字滤波器的基本结构 格型结构
IIR数字滤波器的基本结构
第五章 时域离散系统的基本网络结构
本章的主要内容就是描述数字滤波器的基 本网络结构。(IIR、FIR)
引言
时域离散系统或网络可以用差分方程、单 位脉冲响应以及系统函数进行描述。
M
N
y(n) bi x(n i) ai y(n i)
i0
i 1
系统函数H(z)为
M
H (z)
(2) 流图环路中必须存在延时支路;
(3) 节点和支路的数目是有限的。
信号流图表达的系统含义
每个节点连接的有输入支路和输出支路,节点变 量等于所有输入支路的输出之和.
根据信号流图可以求出系统函数(节点法、梅逊 公式法)。
1(n) 2 (n 1) 2 (n) 2 (n 1) 2 (n) x(n) a12 (n) a21n y(n) b21(n) b12 (n) b02(n)
画出H(z)的直接型结构和级联型结构。
级联型
解: 将H(z)进行因式分解,得到: H(z)=(0.6+0.5z-1)(1.6+2z-1+3z-2)
其直接型结构和级联型结构如图所示。
x(n)
0.6
z- 1 0.5
1.6 z- 1
2 z- 1
3
y(n) x(n)
z- 1
z- 1
z- 1
0.96 2
2.8 1.5 y(n)
0 j
y(n)
1 j
z- 1 1j
1 j
z- 11 j
(a)
2 j
z-
1
2
j
(b)
一阶和二阶直接型网络结构 (a)直接型一阶网络结构;(b)直接型二阶网络结构
IIR的级联型例题
第9章 系统的信号流图

x ( n)
w(n)
b0 b1
y ( n)
z 1
b1
a1 a2
z 1 z 1
z 1 z 1
z 1
通过加入变量w(n),计算该系统的系统函数,可以得出与原系统相同的结 果 由以上例题可见,一个系统可以由不同的网络结构实现,在选择不同的 网络结构时,我们需要权衡考虑诸多方面的因素,最主要的就是数字计算的 复杂程度和硬件实现的花销。一般最希望网络中乘法器和延时支路尽可能少 ,这是因为乘法运算花费的时间较长,减少乘法器意味着提高运算速度,而 一个延时单元就相当于采用一个寄存器,减少延时单元就意味着减少存储电 路。另一方面,在用硬件实现数字滤波器时,有限寄存器长度(有限计算精 度)和滤波器结构关系密切,所以有时候希望选用对有限字长效应的影响敏 感度较低的网络结构,而宁愿舍弃乘法器和延时单元少的结构。下面我们将 介绍一些常用的网络形式,对IIR系统和FIR系统分开讨论。
H ( z ) n 0 h( n) z n
N 1
如果FIR的冲激响应长度为N,那么H(Z)就是Z-1的N-1次多项式,在z=0处有一 个N-1阶的极点,并有N-1个零点。FIR的实现结构也有多种形式,下面介绍其最 重要的几种网络结构
1、直接形式 N 1 n 若FIR的系统函数为 ,则相应的差分方程为 , H ( z) h ( n ) z n 0 该式我们通常称为卷积和公式,由此,我们可得如下直接形式的网络结构。 N 1
b 1 az 1
则其信号流图如下
x ( n)
将其转置后有
y ( n) y ( n)
b
再按输入在左输出在右的习 惯可以画成
x ( n)
b
x ( n)
第五章_数字滤波器结构-3
N 2
1
对其反变换:
y( n)
h( i )[ x( n i ) x( n N 1 i )]
i 0
N 1 2
x(n)
z-1
z-1
z-1
各有N/2-1 个延迟
-1 z-1 h(0) h(1)
-1
z-1
-1
-1
z-1
-1
z-1
h(2)
2
h(N/2-1)
y(n)
y ( n) h(i )[ x ( n i ) x ( n 6 1 i )]
的线性组合,在
时,
易取得最大
值,因此这一类滤波器易体现低通特性,且是 偶函数。通过频率移位,又可体现高通、带通、 带阻特性。所以,经典的低通、高通、带通和 带阻滤波器的 都是偶对称的。
第二类 FIR 系统是 (h(n)奇对称) 的线性组合,在 时, 的值为零,且
是奇函数。这一类滤波器都是作为特殊形式的 滤波器,如 Hilbert变换器、差分器等。
线性相位FIR系统的网络结构 线性相位定义:
幅频响应 相频响应 如果: 或
则称系统具有线性相位特性
只对具有线性相位的FIR系统有此结构!!!
为什么使用线性相位系统? 假定: 对输入 ,有
所以: 输出是输入的简单移位,移位的大小正比于k因此不会发 生失真。 在通带内的信号通过数字滤波器之后,除了相频特性的斜率 决定的延迟外,可以不失真地保留通带内的信号。
例:令 具有线性相位
则:
没有发生相位失真
例:令
若:
则:
发生了相位失真
如果系统的相频响应不是线性的,那么系统的输出将不 再是输入信号作线性移位后的组合,因此,输出将发生失真。
数字信号处理期末汇总
1.简述冲激响应不变法和双线性设计IIR 数字滤波器的优缺点。
冲激响应不变法的优点:1)h (n )完全模仿模拟滤波器的单位抽样响应,时域逼近良好;2)数字滤波器指标和模拟滤波器指标保持线性关系。
冲激响应不变法的缺点:具有频率的混叠效应,所设计的滤波器应该需充分限带,所以高通和带阻滤波器不宜采用冲击不变法。
双线性变换法的优点:S 平面与z 平面为单值变换,避免了频率响应的混跌现象。
双线性变换法的缺点:除了零频附近,模拟指标和数字指标之间存在严重的非线性,必须进行指标的预畸变。
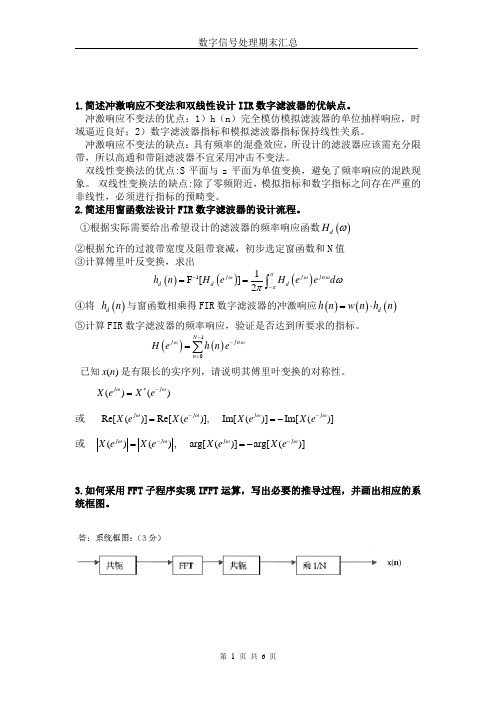
2.简述用窗函数法设计FIR 数字滤波器的设计流程。
①根据实际需要给出希望设计的滤波器的频率响应函数()d H ω②根据允许的过渡带宽度及阻带衰减,初步选定窗函数和N 值③计算傅里叶反变换,求出()()()11F []2j j j n d d d h n H e H e e d πωωωπωπ--==⎰ ④将 ()d h n 与窗函数相乘得FIR 数字滤波器的冲激响应()()()d h n w n h n =⋅ ⑤计算FIR 数字滤波器的频率响应,验证是否达到所要求的指标。
()()10N j j n n H e h n eωω--==∑已知()x n 是有限长的实序列,请说明其傅里叶变换的对称性。
()()j j X e X e ωω*-=或 Re[()]Re[()], Im[()]Im[()]j j j j X e X e X e X e ωωωω--==-或 ()(), arg[()]arg[()]j j j j X e X e X e X e ωωωω--==-3.如何采用FFT 子程序实现IFFT 运算,写出必要的推导过程,并画出相应的系统框图。
4.简述IIR 数字滤波器的设计步骤。
1)确定数字低通滤波器的技术指标:通带边界频率p ω,通带最大衰减p α,阻带截止频率s ω,阻带最小衰减s α。
2)将数字低通滤波器的技术指标转换成相应的模拟低通滤波器的技术指标。
5 第五章_数字滤波器结构-2
8 16 20 z 1 H ( z ) 16 1 1 0.5z 1 z 1 0.5z 2
将上式中的每一部分画成直接型结构,再进行并联,最 后得到IIR并联型结构如图所示。
8 16 20 z 1 H ( z ) 16 1 1 0.5z 1 z 1 0.5z 2
1 1 1 1将上式写成来自面形式:式中1 0.3z 1 1 0.4 z 1 H ( z) H1 ( z ) H 2 ( z ) 1 1 1 0.6 z 1 0.5z
1 0.3z 1 1 0.4 z 1 H1 ( z ) , H 2 ( z) 1 1 0.6 z 1 0.5z 1
这里H1(z)和H2(z)分别是IIR一阶网络,将它们进行级 联, 得到级联型网络结构。
1 0.3z 1 1 0.4 z 1 H ( z) H1 ( z ) H 2 ( z ) 1 1 1 0.6 z 1 0.5z
x (n ) z- 1 0.6 x (n ) z- 1 0.6 0.4 (b ) z- 1 0.3 (a ) y (n ) z- 1 y (n )
[例] 设IIR数字滤波器差分方程为
y ( n) 8 x ( n) 4 x ( n 1) 11x ( n 2) 2 x ( n 3) 5 3 1 y (n 1) y (n 2) y (n 3) 4 4 8
试用四种基本结构实现此差分方程。 解 对差分方程两边取z变换,得系统函数
1
1
2
• 上式中的第一部分是IIR一阶网络,它的系数决定一对 零极点; 第二部分是 IIR 二阶网络,它决定一对零点 和一对极点。这两部分相互级联起来,构成IIR级联型 网络结构。
数字滤波器网络结构分类

数字滤波器网络结构分类对于一般的数字滤波器,是按照以下两个观点进行分类的: (一)根据冲激响应函数的时间特性分为二类 1.FIR (Finite Impulse Response )数字滤波器网络()()()∑=⎩⎨⎧≤≤=⇔-=Mi n i nM n b n h i n x b n y 0,00, 其它 特点:不存在反馈支路,其单位冲激响应为有限长。
2.IIR (Infinite Impulse Response )数字滤波器网络()()()∑∑==---=M i Ni iii n y a i n x b n y 01特点:存在反馈支路,即信号流图中存在环路,其单位冲激响应为无限长。
(二)根据数字滤波器的实现方法和型式分为三类 1.递归型数字滤波器利用递归法实现的输出序列决定于现时的输入序列和过去任意数目的输入与输出的序列值.从下式可以清楚地看出这种数字滤波器的输出序列与下述序列与输出序列的函数关系()()()∑∑==---=M i Ni iii n y a i n x b n y 012.非递归型数字滤波器应用非递归或直接卷积的实现方法是:现在的输出序列仅是现在和过去的输入序列的函数,也就是下式中()()()∑∑==---=M i Ni iii n y a i n x b n y 010=i a 的情况,因此()()∑=-=Mi ii n x b n y 03.快速傅立叶变换(FFT )实现数字滤波对于差分方程()()∑∑==-=-N k Mk kkk n x b k n y a 0对上式取z 变换,()()⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡-∑∑==N k k N k k k n x b Z k n y a Z 00或者写成()[]()[]r n x Z b k n y Z a Nk kN k k-=-∑∑==0根据z 变换的延迟性,可以得到()[]()z Y zk n y Z k-=-()[]()z X zk n x Z k-=-于是经过z 变换,将解差分方程问题简化成代数方程:()()∑∑==--=Nk Mk kk kk zz X b zz Y a 0解出()z Y()()()()()z X z A z B z X zazb z Y Nk kkMk kk ==∑∑=-=-0因为()()()z X z H z Y =传输函数()NN N N Nk kkMk kk za za za a zb z b z b b zazb z H ------=-=-+⋯++++⋯+++==∑∑22110221100由此可以看出,系统函数的分子和分母多项式的系数分别相当于描述系统的差分方程两边的系数。
第四章-数字滤波器的基本结构
将(4-7)式关系代入上式,得
H ( z)
N 11 2
h(n)
[zn
z(N 1n) ]
h(
N
1)
N 1
z2
(4-9)
n0
2
(4-8)(4-9)式中+号代表偶对称,-号代表奇对称。
当h(n)奇对称时,由于
h(n)
h(
N
1
n), 故h(
N 1) 2
0
下面的图19、图20分别画出N为偶数和N为奇数时 的线性相位FIR滤波器的结构。
W k N
WN( N k )
各并联支路的极点为
r
j 2 k
e N
,k
0,1, 2,
, N 1
为使系数为实数,可将共轭根合并,在z平面上 这些共轭根在半径为r的圆周上以实轴为轴成对 称分布,即 zN k zk
也就是 W (N k )
j 2 ( N k )
e N
(e
j
2 k N
)
WNk
27
4.3 有限长单位冲激响应(FIR)滤波器 的基本结构
级联型的每级对应一组由 (0i , 1i , 2i ) 参数决定的零点
6
4.3 有限长单位冲激响应(FIR)滤波器 的基本结构
三、线性相位的FIR滤波器结构: 在许多实际应用,如图像处理中,要求数字滤波器具
有线性相位 具有线性相位特性的滤波器传输函数H(ej)为
H(e j ) H() e j ()
则(4-12)式可写成:
1
N 1
H (z)
N
HC (z)
k 0
HK (z)
(4-13)
N 1
上式表明H(z)可看成是由 HC (z)和 HK (z) 两部分级 k 0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
x(n)
z 1
z 1
z 1
z 1
z 1
z 1
h(0) h(1)
h(2)
h(3)
y(n)
(a) N=7
Digital Signal Processing
FIR系统网络结构
N为奇数时
线性相位结构
Digital Signal Processing
FIR系统网络结构
线性相位结构
N=6
h(n)
23
01
45
N 1
Hc (z) Hk (z)
k0
Hc (z) 1 zN ____FIR梳状滤波器
零点:
zk
j 2 k
e N
W
N
k
,
k 0,1, , N 1
Hk (z)
H (k )
1
W
N
k
z
1
____IIR谐振网络
极点:
zk
j 2 k
e N
W
N
k
,
k 0,1, , N 1
Digital Signal Processing
FIR系统网络结构
x(n)
zN
频率采样结构
H(0)
y(n)
WN0
z 1
1 N
H(1)
WN1
z 1
Digital Signal Processing
WN N 1
H(N-1)
z 1
FIR系统网络结构
修正的频率采样结构
H (z)
(1 r N z N )
1 N
N 1 Hr (k )
k
0
1
rW
N
解:
Digital Signal Processing
FIR系统网络结构
级联型结构
例6.5 设FIR网络系统函数 H (z) 如下式: H (z) 0.96 2z1 2.8z2 1.5z3 画出 H (z) 的直接型结构和级联型结构。
解:
H (z) (0.6 0.5z1)(1.6 2z1 3z2 )
Digital Signal Processing
FIR系统网络结构
线性相位结构
N=7
h(n)
12
56
0
34
n
对称中心
y(n) h(0)[ x(n) x(n 6)] h(1)[ x(n 1) x(n 5)] h(2)[ x(n 2) x(n 4)] h(3)[ x(n 3)]
1
2r
0k 1k z1 cos( 2 k )z1
N
r
2 z 2
N
k k
1, 1,
2, 2,
..., ...,
N 2
N 2
1 1
, ,
第6章 时域离散系统的基本网络结构
无限冲激响应 基本网络结构
直接型
有限冲激响应 基本网络结构
级联型 线性相位结构
频率采样结构
Digital Signal Processing
6.2有限冲激响应基本网络结构
主要内容
一. 直接型结构 二. 级联型结构 三. 线性相位结构 四. 频率采样结构
Digital Signal Processing
x(n)
x(n-1) x(n-2)
x(n-3)
z 1
z 1
z 1z1Fra bibliotekz1z 1
z 1
h(0) h(1)
h(2)
h(3)
y(n)
(b) N=8
Digital Signal Processing
FIR系统网络结构
N为偶数时
线性相位结构
Digital Signal Processing
FIR系统网络结构
N=5
x(n)
直接型结构
N 1
H (z) h(n)zn n0
N 1
y(n) h(m)x(n m) m0
z1 x(n1) z1 x(n2) z1x(n3) z1x(n4)
h(0)
h(1)
h(2) h(3)
h(4) y(n)
Digital Signal Processing
FIR系统网络结构
级联型结构
x(n)
01
z 1
11
z 1
21
02
z 1 12
z 1 22
03
z 1 13
z 1 23
y(n)
N=6时FIR系统级联型结构
Digital Signal Processing
FIR系统网络结构
级联型结构
例6.5 设FIR网络系统函数 H (z) 如下式: H (z) 0.96 2z1 2.8z2 1.5z3 画出 H (z) 的直接型结构和级联型结构。
频率采样结构 设: h(n) 0 n M 1
H(k) H(z) , j2 k k 0,1, , N 1 ze N
H (z) (1
zN )
1 N
N 1 H (k)
k0
1
W
N
k
z 1
Digital Signal Processing
FIR系统网络结构
频率采样结构
H (z)
1 N
Digital Signal Processing
FIR系统网络结构
线性相位结构
y(n) h(0)[ x(n) x(n 6)] h(1)[ x(n 1) x(n 5)] h(2)[ x(n 2) x(n 4)] h(3)[ x(n 3)]
x(n-1) x(n-2) x(n-3)
n
对称中心
y(n) h(0)[x(n) x(n 5)] h(1)[x(n 1) x(n 4)] h(2)[x(n 2) x(n 3)]
Digital Signal Processing
FIR系统网络结构
线性相位结构
y(n) h(0)[ x(n) x(n 7)] h(1)[ x(n 1) x(n 6)] h(2)[ x(n 2) x(n 5)] h(3)[ x(n 3) x(n 4)]
k
z
1
Hr (k)
H(z)
z
rW
N
k
H(z)
zWNk H (k )
H (z)
(1 r N z N )
1 N
N 1 H (k)
k0
1
rW
N
k
z 1
零极点:
re j(2 k N ) , k 0,1, 2 , N 1
Digital Signal Processing
FIR系统网络结构
修正的频率采样结构
Digital Signal Processing
FIR系统网络结构
线性相位结构
FIR滤波器单位抽样响应h(n)为实数,0 n N 1 且满足:
偶对称: h(n) h(N 1 n) 或奇对称: h(n) h(N 1 n) 即对称中心在 (N-1)/2处 则这种FIR滤波器具有严格线性相位。
对实序列h(n)
H (k )
H*(N
k)
k k
1, 2, ..., 1, 2, ...,
N 2
N 2
1 1
, ,
N 为奇数 N 为偶数
H(k)
H(N k)
H(k)
H (k )
Hk (z) 1 rWNk z1 1 rWN( N k)z1 1 rWNk z1 1 r(WNk ) z1