履带式机器人讲解ppt课件
合集下载
机器人的组成结构(PPT52页)
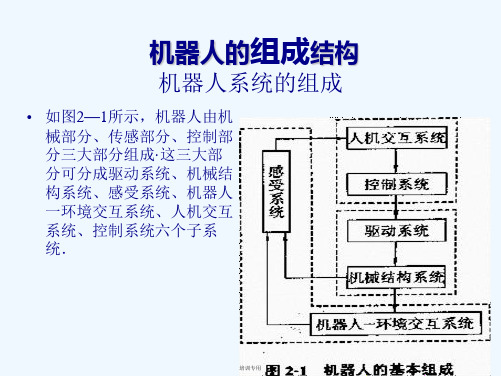
• 感受系统 它由内部传感器模块和外部传感器模块组成,获 取内部和外部环境状态中有意义的信息.智能传感器的使 用提高了机器人的机动性、适应性和智能化的水准.人类 的感受系统对感知外部世界信息是极其灵巧的,然而,对 于一些特殊的信息,传感器比人类的感受系统更有效.
• 机器人一环境交互系统 机器人一环境交互系统是实现机器人与外部环境中的设备相 互联系和协调的系统.机器人与外部设备集成为一个功能单 元,如加工制造单元、焊接单元、装配单元等
度,即重复度。
培训专用
工作空间(Working space):机器人手腕 参考点或末端操作器安装点(不包括末端 操作器)所能到达的所有空间区域,一般 不包括末端操作器本身所能到达的区域。
培训专用
工业机器人的机械结构
工业机器人的机械本体类似于具备上肢机能的机械手 ,由 手部、腕部、臂、机身(有的包括行走机构)组成。
培训专用
• 正弦波电动机(交流无刷伺 服电动机):顾名思义,它 是由正弦波电流驱动的。对 三相情况,电流相位差 120。,而且这三相电流是 随转子位置不同而不同的, 也就是说,转子的位置检测 需更精确,驱动电路也比梯 形波电动机的更复杂,但却 代表着无刷电动机最高水平, 因为它能保持恒定转矩输出
培训专用
加入速度反馈。一般直流电动机和位置反馈、速度反馈形成 一个整体,即通常所说的直流伺服电机。由于采用闭环伺 服控制,所以能实现平滑的控制和产生大的力矩
• 当今大部分机器人都采用直流伺服电机驱动机器人的各个关节, 但它们也有一些缺点,如转速不能太高
• 近年来,新发展起来的无刷直(交)流伺服电动机克服了 上述缺点,并保留了直流伺服电动机的优点,因此无刷电 动机逐渐取代了直流伺服电动机
培训专用
相关术语及性能指标
• 机器人一环境交互系统 机器人一环境交互系统是实现机器人与外部环境中的设备相 互联系和协调的系统.机器人与外部设备集成为一个功能单 元,如加工制造单元、焊接单元、装配单元等
度,即重复度。
培训专用
工作空间(Working space):机器人手腕 参考点或末端操作器安装点(不包括末端 操作器)所能到达的所有空间区域,一般 不包括末端操作器本身所能到达的区域。
培训专用
工业机器人的机械结构
工业机器人的机械本体类似于具备上肢机能的机械手 ,由 手部、腕部、臂、机身(有的包括行走机构)组成。
培训专用
• 正弦波电动机(交流无刷伺 服电动机):顾名思义,它 是由正弦波电流驱动的。对 三相情况,电流相位差 120。,而且这三相电流是 随转子位置不同而不同的, 也就是说,转子的位置检测 需更精确,驱动电路也比梯 形波电动机的更复杂,但却 代表着无刷电动机最高水平, 因为它能保持恒定转矩输出
培训专用
加入速度反馈。一般直流电动机和位置反馈、速度反馈形成 一个整体,即通常所说的直流伺服电机。由于采用闭环伺 服控制,所以能实现平滑的控制和产生大的力矩
• 当今大部分机器人都采用直流伺服电机驱动机器人的各个关节, 但它们也有一些缺点,如转速不能太高
• 近年来,新发展起来的无刷直(交)流伺服电动机克服了 上述缺点,并保留了直流伺服电动机的优点,因此无刷电 动机逐渐取代了直流伺服电动机
培训专用
相关术语及性能指标
特种机器人介绍ppt课件

• 林木球果采集机器人由机械手、行走机构、 液压驱动系统和单片机控制系统组成。
• 试验表明,这种球果采集机器人每台能采集 落叶松果500公斤,是人工上树采摘的30-35 倍。这种机器人采摘林木球果时,对母树破 坏较小,采净率高,对森林生态环境的保护 及林业的可持续发展有益。
林木球果采集机 器人Biblioteka .四、特种机器人实例
特种机器人介绍
.
内容简介
• 特种机器人分类与应用 • 特种机器人结构特点 • 特种机器人工作环境的多样性和复杂性 • 特种机器人实例
.
一、特种机器人分类与应用
• 特种机器人由于具有灵活性、机动性,可代替人完成 重复、繁琐或危险的劳动,已广泛应用于服务、医疗 卫生、海洋探索等领域。随着机器人技术的突飞猛进, 特种机器人将呈现出更加广阔的应用前景。
底及海洋中,蕴藏着极其丰富的生物资源及6000亿亿吨的矿产 资源。海洋还是一个无比巨大的能源库,全世界海洋中储存着 2800亿吨石油,近140亿立方米的天然气。因此,洋底的探测和 太空探测类似,同样具有极强的吸引力、挑战性。
• 众所周知,海底世界不仅压力非常大,而且伸手不见五指,环 境非常恶劣。不论是沉船打捞、海上救生、光缆铺设,还是资 源勘探和开采,一般的设备很难完成。于是人们将目光集中到 了机器人身上,希望通过机器人来解开大海之迷,为人类开拓 更广阔的生存空间。
• 随着机器人技术的不断进步和机器人制造和使用成本的 不断降低,可以预见在不久的将来特种机器人将会应用 到更多的领域,呈现出更好的使用前景。
.
四、特种机器人实例
• 1.服务机器人 • 2.医疗机器人 • 3.水下机器人 • 4.农林业机器人 • 5.娱乐机器人
.
四、特种机器人实例
• 试验表明,这种球果采集机器人每台能采集 落叶松果500公斤,是人工上树采摘的30-35 倍。这种机器人采摘林木球果时,对母树破 坏较小,采净率高,对森林生态环境的保护 及林业的可持续发展有益。
林木球果采集机 器人Biblioteka .四、特种机器人实例
特种机器人介绍
.
内容简介
• 特种机器人分类与应用 • 特种机器人结构特点 • 特种机器人工作环境的多样性和复杂性 • 特种机器人实例
.
一、特种机器人分类与应用
• 特种机器人由于具有灵活性、机动性,可代替人完成 重复、繁琐或危险的劳动,已广泛应用于服务、医疗 卫生、海洋探索等领域。随着机器人技术的突飞猛进, 特种机器人将呈现出更加广阔的应用前景。
底及海洋中,蕴藏着极其丰富的生物资源及6000亿亿吨的矿产 资源。海洋还是一个无比巨大的能源库,全世界海洋中储存着 2800亿吨石油,近140亿立方米的天然气。因此,洋底的探测和 太空探测类似,同样具有极强的吸引力、挑战性。
• 众所周知,海底世界不仅压力非常大,而且伸手不见五指,环 境非常恶劣。不论是沉船打捞、海上救生、光缆铺设,还是资 源勘探和开采,一般的设备很难完成。于是人们将目光集中到 了机器人身上,希望通过机器人来解开大海之迷,为人类开拓 更广阔的生存空间。
• 随着机器人技术的不断进步和机器人制造和使用成本的 不断降低,可以预见在不久的将来特种机器人将会应用 到更多的领域,呈现出更好的使用前景。
.
四、特种机器人实例
• 1.服务机器人 • 2.医疗机器人 • 3.水下机器人 • 4.农林业机器人 • 5.娱乐机器人
.
四、特种机器人实例
履带机器人的参数

单击此处添加大标题
履带机器人采用了无线遥控履带式升降平台、移动平台, 操作简单、自动行走、升降平稳、外形美观、安全可靠、 体积小、重量轻、实用性强的优良特性,是智能高科技的 机械产品,是登高作业、移动作业的好帮手。
履带机器人参数:
天然橡胶履带无线遥控升降机设备长1350㎜,设备宽 1100㎜,设备高1770㎜,设备自重500KG,载重 125KG,时速5KG/h, 升降高度从6米-12米不等规格。
履带机器人
履带机器人应用范围:
履带机器履带机器人应用范围:人应履带 履带机器人机用是器 范用人 围途应 :广用 履的范 带高空围 机作: 器业用人用范应设围用备:范。履围它采带:用机铝器合人金应机械结构,使升降台起升有较高的稳 定性,宽大的作业平台和较高的承载能力,使高空作业范围大、并适合多人同时作业。升降 动力分为220V或48V电源电瓶动力源,其他环境也可采用防爆泵站及防爆电器。台面使用防 滑绝缘扣板,具有防滑,绝缘、安全,请放心使用。使高空作业效率高,安全保障。
THANKS
山东卡特智能机器人有限Hale Waihona Puke 司2020履带机器人
kate08
目录
CONTENTS
01
履带机器人概述
02
履带机器人参数
履带机器人概述:
履带移动机器人具有牵引力大、不易打滑、越野 性能好等优点,可以搭载 、探测器等设备代替人
履带机器类人从事采一用些了危无险线工遥作控(履如排带爆式、升化降学平探台测、等移),动平台,操作简单、自动行走、升降平稳、外形美观、安全可靠、 体减积少小不、必重要量的轻人员、伤实亡用。性强的优良特性,是智能高科技的机械产品,是登高作业、移动作业的好帮手。
履带式机器人讲解
2.1性能参数 行驶速度 爬坡能力 接地比压 最大牵引力 2.2结构参数
履带链轨节距t,履带板宽度,驱动轮节圆直径, 导向轮工作面直径,托链轮踏面直径,支重轮踏面 直径,支重轮个数
自动化工程学院 School of Mechanical Engineering
履带式机器人车体特性
• 轮式机器人: 优点:速度快、效率高、运动噪声低、 缺点:越障能力、地形适应能力差、转弯效率低,或转外 半径大。 适合:野外、城市环境都可以,但是地形不能太复杂,如 上楼梯难以实现
履带式机器人: 优点:越障能力、地形适应、抓地能力强,可原地转弯 缺点:速度相对较低、效率低、运动噪声较大 适合:野外、城市环境都可以,尤其在爬楼梯、越障等方 面优于轮式机器人
管道清理机器人
管道勘察机器人
履带式防爆机器人
搜救机器人
侦查型
侦查型机器人
履带式机器人的机构特点
• 形状可变履带机器人 • 所谓形状可变履带机器人,是指该机器人所用履
形状可变履带机器人外形结构示 意图
博学笃行 盛德日新
履带式机器人
自动化工程学院
1916年9月,英法联军与德 军在法国索姆河畔展开激战。 英军突然出动了49辆黑黝黝的 钢铁怪物,以每小时6千米的速 度在松软的土地上隆隆地冲向 德军阵地。打得德军人仰马翻。 这就是最早的实战坦克。坦克 为什么能在松软和泥泞的土地 上快速行驶呢?这与它那双 “铁脚板底盘设计
自动化工程学院
导向轮(引导轮):
履带式底盘设计
自动化工程学院
驱动轮:
履带式底盘设计
自动化工程学院
履带:
履带式底盘设计
自动化工程学院
履带架:
履带式底盘设计
自动化工程学院 School of Mechanical Engineering
履带链轨节距t,履带板宽度,驱动轮节圆直径, 导向轮工作面直径,托链轮踏面直径,支重轮踏面 直径,支重轮个数
自动化工程学院 School of Mechanical Engineering
履带式机器人车体特性
• 轮式机器人: 优点:速度快、效率高、运动噪声低、 缺点:越障能力、地形适应能力差、转弯效率低,或转外 半径大。 适合:野外、城市环境都可以,但是地形不能太复杂,如 上楼梯难以实现
履带式机器人: 优点:越障能力、地形适应、抓地能力强,可原地转弯 缺点:速度相对较低、效率低、运动噪声较大 适合:野外、城市环境都可以,尤其在爬楼梯、越障等方 面优于轮式机器人
管道清理机器人
管道勘察机器人
履带式防爆机器人
搜救机器人
侦查型
侦查型机器人
履带式机器人的机构特点
• 形状可变履带机器人 • 所谓形状可变履带机器人,是指该机器人所用履
形状可变履带机器人外形结构示 意图
博学笃行 盛德日新
履带式机器人
自动化工程学院
1916年9月,英法联军与德 军在法国索姆河畔展开激战。 英军突然出动了49辆黑黝黝的 钢铁怪物,以每小时6千米的速 度在松软的土地上隆隆地冲向 德军阵地。打得德军人仰马翻。 这就是最早的实战坦克。坦克 为什么能在松软和泥泞的土地 上快速行驶呢?这与它那双 “铁脚板底盘设计
自动化工程学院
导向轮(引导轮):
履带式底盘设计
自动化工程学院
驱动轮:
履带式底盘设计
自动化工程学院
履带:
履带式底盘设计
自动化工程学院
履带架:
履带式底盘设计
自动化工程学院 School of Mechanical Engineering
履带式机器人讲解

2.1性能参数 行驶速度 爬坡能力 接地比压 最大牵引力 2.2结构参数 履带链轨节距t,履带板宽度,驱动轮节圆直径, 导向轮工作面直径,托链轮踏面直径,支重轮踏面 直径,支重轮个数
自动化工程学院 School of Mechanical Engineering
履带式机器人车体特性
• 轮式机器人: 优点:速度快、效率高、运动噪声低、 缺点:越障能力、地形适应能力差、转弯效率低,或转外 半径大。 适合:野外、城市环境都可以,但是地形不能太复杂,如 上楼梯难以实现 履带式机器人: 优点:越障能力、地形适应、抓地能力强,可原地转弯 缺点:速度相对较低、效率低、运动噪声较大 适合:野外、城市环境都可以,尤其在爬楼梯、越障等方 面优于轮式机器人
管道清理机器人
管道勘察机器人
履带式防爆机器人
搜救机器人
侦查型
侦查型机器人
履带式机器人的机构特点
• 形状可变履带机器人 • 所谓形状可变履带机器人,是指该机器人所用履 带的构形可以根据地形条件和作业要求进行适当 变化。该机器人的主体部分是两条形状可变的履 带,分别由两个主电动机驱动。当两条履带的速 度相同时,机器人实现前进或后退移动;当两条 履带的速度不同时,机器人实现转向运动。当主 臂杆绕履带架上的轴旋转时,带动行星轮转动, 从而实现履带的不同构形,以适应不同的运动和 作业环境
形状可变履带机器人外形结构示 意图
博学笃行 盛德日新
履带式机器人
自动化工程学院
1916年9月,英法联军与德 军在法国索姆河畔展开激战。 英军突然出动了49辆黑黝黝的 钢铁怪物,以每小时6千米的速 度在松软的土地上隆隆地冲向 德军阵地。打得德军人仰马翻。 这就是最早的实战坦克。坦克 为什么能在松软和泥泞的土地 上快速行驶呢?这与它那双 “铁脚板”----履带是不开的。
自动化工程学院 School of Mechanical Engineering
履带式机器人车体特性
• 轮式机器人: 优点:速度快、效率高、运动噪声低、 缺点:越障能力、地形适应能力差、转弯效率低,或转外 半径大。 适合:野外、城市环境都可以,但是地形不能太复杂,如 上楼梯难以实现 履带式机器人: 优点:越障能力、地形适应、抓地能力强,可原地转弯 缺点:速度相对较低、效率低、运动噪声较大 适合:野外、城市环境都可以,尤其在爬楼梯、越障等方 面优于轮式机器人
管道清理机器人
管道勘察机器人
履带式防爆机器人
搜救机器人
侦查型
侦查型机器人
履带式机器人的机构特点
• 形状可变履带机器人 • 所谓形状可变履带机器人,是指该机器人所用履 带的构形可以根据地形条件和作业要求进行适当 变化。该机器人的主体部分是两条形状可变的履 带,分别由两个主电动机驱动。当两条履带的速 度相同时,机器人实现前进或后退移动;当两条 履带的速度不同时,机器人实现转向运动。当主 臂杆绕履带架上的轴旋转时,带动行星轮转动, 从而实现履带的不同构形,以适应不同的运动和 作业环境
形状可变履带机器人外形结构示 意图
博学笃行 盛德日新
履带式机器人
自动化工程学院
1916年9月,英法联军与德 军在法国索姆河畔展开激战。 英军突然出动了49辆黑黝黝的 钢铁怪物,以每小时6千米的速 度在松软的土地上隆隆地冲向 德军阵地。打得德军人仰马翻。 这就是最早的实战坦克。坦克 为什么能在松软和泥泞的土地 上快速行驶呢?这与它那双 “铁脚板”----履带是不开的。
第六讲履带式机器人

大家一起来
• 今天我们学到了什么?
开始
机器人前进
否 遇到障碍
是
后退
结束
程序图
知识拓展
• 坦克上履带的作用: 1.减小车轮对地面的压强,利于增加防护性 2.适用地形广,便于野外机动 3.保持车体平稳来自提高射击精度思考与总结
• 通过本次课的学习我们知道了机器人不会 撞到障碍物,懂得保护自己,那如果把蜗 牛放在悬崖上会掉下去么? • 如果不用触感蜗牛还能识别障碍物么?
问题思考
• 我们大家都在电视上看到过坦克有些人的玩 具里就有吧?你能根据你的观察和了解说出 坦克是什么样子的?他是怎么样行走了?他 和汽车有什么区别么?
七嘴八舌
• • • • • 提出自己的想法。 听取他人意见。 改进方案。 思考如何使用履带 如何搭建触动传感器
搭建过程
• 车子搭好了该怎么样编写程序呢?
第六讲 履带式机器人
学习目标 知识与技能 一)要求机器人以减速传动的方式运动。 二)掌握履带几辆车带轮的安装方法与传动方式。 三)能够使用触动传感器,使机器人能够在遇到障碍 时停止或者倒退。 四)将履带式与轮式进行比较,了解它们的区别,并 掌握履带式机器人的运动特点。
基本要求
1.使用履带 2.机器人减速运行 3.使用触动传感器控制机器人前进后退
履带式管道机器人方案课件

研究目标
本项目的目标是研制出一款具有自主知识产权的履带式管道 机器人,实现管道内部的自动化检测和维护,提高管道使用 的安全性和效率。同时,通过本项目的实施,推动我国履带 式管道机器人领域的发展和应用。
02
机器人方案
总体设计
机器人尺寸
根据管道直径和长度,确 定机器人的总体尺寸。
移动方式
采用履带式移动方式,能 够在管道内自由行动。
履带式管道机器人能够在 管道内部进行巡检,发现 并记录问题,提高管道维 护的效率和准确性。
降低安全风险
通过履带式管道机器人检 测,可以减少人工进入管 道的风险,降低安全事故 发生的可能性。
国内外研究现状
国外研究现状
履带式管道机器人在国外已经得到了广泛的研究和应用,许多国家和企业都在 投入大量的人力和物力进行相关研究和生产。
中国专利: 申请号202010012349.X, 发明人: 张三, 李四, 王五
感您 看
THANKS
05
景与析
应用领域与场景介绍
01
02
03
04
城市管网检测与维护
石油、天然气等管道的检测和 维护
电力、水务等管道的检测和维 护
工业制造中的物料运输和加工
与其他类型机器人的比较优势分析
适应性强
履带式结构可以适应各种复杂 地形和管道,如弯曲、倾斜、 垂直等。
负载能力强
履带式结构可以承受较大的负 载,能够搭载更多的检测和维 护设备。
履带设计
根据管道直径和复杂程度,设计履 带的长度、宽度和材质,确保稳定 行走和适应不同环境。
移动速度
根据实际需求,可调节移动速度, 实现快速、精准的移动。
管道内导航技术
导航系统
本项目的目标是研制出一款具有自主知识产权的履带式管道 机器人,实现管道内部的自动化检测和维护,提高管道使用 的安全性和效率。同时,通过本项目的实施,推动我国履带 式管道机器人领域的发展和应用。
02
机器人方案
总体设计
机器人尺寸
根据管道直径和长度,确 定机器人的总体尺寸。
移动方式
采用履带式移动方式,能 够在管道内自由行动。
履带式管道机器人能够在 管道内部进行巡检,发现 并记录问题,提高管道维 护的效率和准确性。
降低安全风险
通过履带式管道机器人检 测,可以减少人工进入管 道的风险,降低安全事故 发生的可能性。
国内外研究现状
国外研究现状
履带式管道机器人在国外已经得到了广泛的研究和应用,许多国家和企业都在 投入大量的人力和物力进行相关研究和生产。
中国专利: 申请号202010012349.X, 发明人: 张三, 李四, 王五
感您 看
THANKS
05
景与析
应用领域与场景介绍
01
02
03
04
城市管网检测与维护
石油、天然气等管道的检测和 维护
电力、水务等管道的检测和维 护
工业制造中的物料运输和加工
与其他类型机器人的比较优势分析
适应性强
履带式结构可以适应各种复杂 地形和管道,如弯曲、倾斜、 垂直等。
负载能力强
履带式结构可以承受较大的负 载,能够搭载更多的检测和维 护设备。
履带设计
根据管道直径和复杂程度,设计履 带的长度、宽度和材质,确保稳定 行走和适应不同环境。
移动速度
根据实际需求,可调节移动速度, 实现快速、精准的移动。
管道内导航技术
导航系统
《机器人课程介绍》PPT课件
务。
机器人应用领域
医疗服务
手术协助、康复训 练、护理等。
家庭服务
清洁、陪伴、教育 等。
工业制造
自动化生产线、焊 接、装配等。
军事应用
侦察、排雷、作战 等。
其他领域
农业、航空航天、 水下探测等。
03
核心技术与应用实例
传感器技术及应用
03
传感器类型
传感器原理
应用实例
介绍常见的机器人传感器,如红外传感器 、超声波传感器、陀螺仪等。
及时记录
详细记录实验过程和结果,便于分 析和总结
基础实验项目举例
实验目的
掌握机器人基本运动控制方法
实验内容
编写程序实现机器人前进、后退、转弯等基本动作
基础实验项目举例
实验目的
了解并掌握机器人常用传感器的使用 方法
实验内容
利用传感器采集环境信息,如温度、 湿度、距离等
基础实验项目举例
实验目的
实现机器人自主定位和导航功能
控机等),并考虑其处理速度、存储容量、通信接口等性能指标。
02 03
驱动器选型
根据执行机构的类型和需求,选择合适的驱动器类型(如伺服驱动器、 步进驱动器、直流驱动器等),并考虑其驱动能力、控制精度、调速范 围等性能指标。
传感器选型
根据机器人需要感知的环境信息类型,选择合适的传感器类型(如红外 传感器、超声波传感器、摄像头等),并考虑其测量范围、精度、稳定 性等性能指标。
系统架构设计
设计机器人的整体架构,包括硬件组成、软件框架和通 信协议等
项目总结与展望
对项目成果进行总结评价,提出改进意见和未来发展方 向
07
课程总结与展望
回顾本次课程重点内容
机器人应用领域
医疗服务
手术协助、康复训 练、护理等。
家庭服务
清洁、陪伴、教育 等。
工业制造
自动化生产线、焊 接、装配等。
军事应用
侦察、排雷、作战 等。
其他领域
农业、航空航天、 水下探测等。
03
核心技术与应用实例
传感器技术及应用
03
传感器类型
传感器原理
应用实例
介绍常见的机器人传感器,如红外传感器 、超声波传感器、陀螺仪等。
及时记录
详细记录实验过程和结果,便于分 析和总结
基础实验项目举例
实验目的
掌握机器人基本运动控制方法
实验内容
编写程序实现机器人前进、后退、转弯等基本动作
基础实验项目举例
实验目的
了解并掌握机器人常用传感器的使用 方法
实验内容
利用传感器采集环境信息,如温度、 湿度、距离等
基础实验项目举例
实验目的
实现机器人自主定位和导航功能
控机等),并考虑其处理速度、存储容量、通信接口等性能指标。
02 03
驱动器选型
根据执行机构的类型和需求,选择合适的驱动器类型(如伺服驱动器、 步进驱动器、直流驱动器等),并考虑其驱动能力、控制精度、调速范 围等性能指标。
传感器选型
根据机器人需要感知的环境信息类型,选择合适的传感器类型(如红外 传感器、超声波传感器、摄像头等),并考虑其测量范围、精度、稳定 性等性能指标。
系统架构设计
设计机器人的整体架构,包括硬件组成、软件框架和通 信协议等
项目总结与展望
对项目成果进行总结评价,提出改进意见和未来发展方 向
07
课程总结与展望
回顾本次课程重点内容
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
20
形状可变履带机器人外形结构示 意图
21
22
23
2
主要内容:
一、履带式底盘结构 二、面临的问题和需要做的工作
自动化工程学院 3
一、履带式底盘结构
履带式底盘设计
• 结构组成:支重轮,拖链轮,导向轮(引导轮), 驱动轮,履带,履带架,履带行走架
其它结构:张紧装置,行走液压马达和减速机
自动化工程学院 4
履带式底盘设计
自动化工程学院 5
支重轮:
履带式底盘设计
13
管道清理机器人
14
管道勘察机器人
15
履带式防爆机器人
16
搜救机器人
17
侦查型
18
侦查型机器人
19
履带式机器人的机构特点
• 形状可变履带机器人 • 所谓形状可变履带机器人,是指该机器人所用履
带的构形可以根据地形条件和作业要求进行适当 变化。该机器人的主体部分是两条形状可变的履 带,分别由两个主电动机驱动。当两条履带的速 度相同时,机器人实现前进或后退移动;当两条 履带的速度不同时,机器人实现转向运动。当主 臂杆绕履带架上的轴旋转时,带动行星轮转动, 从而实现履带的不同构形,以适应不同的运动和 作业环境
履带式机器人车体特性
• 轮式机器人: 优点:速度快、效率高、运动噪声低、 缺点:越障能力、地形适应能力差、转弯效率低,或转外 半径大。 适合:野外、城市环境都可以,但是地形不能太复杂,如 上楼梯难以实现
履带式机器人: 优点:越障能力、地形适应、抓地能力强,可原地转弯 缺点:速度相对较低、效率低、运动噪声较大 适合:野外、城市环境都可以,尤其在爬楼梯、越障等方 面优于轮式机器人
博学笃行 盛德日新
履带式机器人
自动化工程学院
1
1916年9月,英法联军与德 军在法国索姆河畔展开激战。 英军突然出动了49辆黑黝黝的 钢铁怪物,以每小时6千米的速 度在松软的土地上隆隆地冲向 德军阵地。打得德军人仰马翻。 这就是最早的实战坦克。坦克 为什么能在松软和泥泞的土地 上快速行驶呢?这与它那双 “铁脚板院 6
拖链轮:
履带式底盘设计
自动化工程学院 7
导向轮(引导轮):
履带式底盘设计
自动化工程学院 8
驱动轮:
履带式底盘设计
自动化工程学院 9
履带:
履带式底盘设计
自动化工程学院 10
履带架:
履带式底盘设计
自动化工程学院 11 School of Mechanical Engineering
履带式底盘设计
二、履带式底盘设计参数的选定
2.1性能参数 行驶速度 爬坡能力 接地比压 最大牵引力 2.2结构参数
履带链轨节距t,履带板宽度,驱动轮节圆直径, 导向轮工作面直径,托链轮踏面直径,支重轮踏面 直径,支重轮个数
自动化工程学院 12 School of Mechanical Engineering
形状可变履带机器人外形结构示 意图
21
22
23
2
主要内容:
一、履带式底盘结构 二、面临的问题和需要做的工作
自动化工程学院 3
一、履带式底盘结构
履带式底盘设计
• 结构组成:支重轮,拖链轮,导向轮(引导轮), 驱动轮,履带,履带架,履带行走架
其它结构:张紧装置,行走液压马达和减速机
自动化工程学院 4
履带式底盘设计
自动化工程学院 5
支重轮:
履带式底盘设计
13
管道清理机器人
14
管道勘察机器人
15
履带式防爆机器人
16
搜救机器人
17
侦查型
18
侦查型机器人
19
履带式机器人的机构特点
• 形状可变履带机器人 • 所谓形状可变履带机器人,是指该机器人所用履
带的构形可以根据地形条件和作业要求进行适当 变化。该机器人的主体部分是两条形状可变的履 带,分别由两个主电动机驱动。当两条履带的速 度相同时,机器人实现前进或后退移动;当两条 履带的速度不同时,机器人实现转向运动。当主 臂杆绕履带架上的轴旋转时,带动行星轮转动, 从而实现履带的不同构形,以适应不同的运动和 作业环境
履带式机器人车体特性
• 轮式机器人: 优点:速度快、效率高、运动噪声低、 缺点:越障能力、地形适应能力差、转弯效率低,或转外 半径大。 适合:野外、城市环境都可以,但是地形不能太复杂,如 上楼梯难以实现
履带式机器人: 优点:越障能力、地形适应、抓地能力强,可原地转弯 缺点:速度相对较低、效率低、运动噪声较大 适合:野外、城市环境都可以,尤其在爬楼梯、越障等方 面优于轮式机器人
博学笃行 盛德日新
履带式机器人
自动化工程学院
1
1916年9月,英法联军与德 军在法国索姆河畔展开激战。 英军突然出动了49辆黑黝黝的 钢铁怪物,以每小时6千米的速 度在松软的土地上隆隆地冲向 德军阵地。打得德军人仰马翻。 这就是最早的实战坦克。坦克 为什么能在松软和泥泞的土地 上快速行驶呢?这与它那双 “铁脚板院 6
拖链轮:
履带式底盘设计
自动化工程学院 7
导向轮(引导轮):
履带式底盘设计
自动化工程学院 8
驱动轮:
履带式底盘设计
自动化工程学院 9
履带:
履带式底盘设计
自动化工程学院 10
履带架:
履带式底盘设计
自动化工程学院 11 School of Mechanical Engineering
履带式底盘设计
二、履带式底盘设计参数的选定
2.1性能参数 行驶速度 爬坡能力 接地比压 最大牵引力 2.2结构参数
履带链轨节距t,履带板宽度,驱动轮节圆直径, 导向轮工作面直径,托链轮踏面直径,支重轮踏面 直径,支重轮个数
自动化工程学院 12 School of Mechanical Engineering