掘锚机产品规格及大部件
350_掘锚联合机组整体方案设计(附全套图纸)
高强度锚杆支护与传统的支 护方式相比,它有几大优点: 1)减少长壁工作面端头支护耽搁的时间,工作面回采速度加快;
掘进配套的单体支腿式液压锚杆钻机。澳大利亚气动支腿式锚杆钻机主要有柱塞马达与 齿轮马达式两种(早期叶片式气动马达已淘汰),采用玻璃钢碳素纤维支腿。澳大利亚液 压锚杆钻机可以以矿物油和难燃液为工作液,回转机构由摆线液压马达驱动,有的产品 采用玻璃钢碳素纤维支腿使机重减轻。
1.3.2 国内现状
国内锚杆钻机的研制经历了 30 多年的历程,曾先后研制机械支腿式电动锚杆钻机、 钻车式锚杆钻机、支腿与导轨式液压锚杆钻机、支腿式气动锚杆钻机、非机械传动支腿 式电动锚杆钻机、机载式锚杆钻机和双级气腿凿岩机等。从实际情况看,MQT-50C 系列支 腿式气动锚杆钻机、MZ-Ⅲ型导轨式液压锚杆钻机、ZYX100 型(改进成 MYT-115 型)支腿式 液压锚杆钻机以及 ZY24M、7665M 气动双级气腿凿岩机在国内有一定市场。其中,MQT-50C 系列产品近年已能代替同类(气腿齿轮马达式)进口产品。
煤矿锚杆钻机多为回转式,为配合推广小直径树脂锚杆,钻头采用 27~29 mm 的回 转钻头,其结构类型多为两翼对称、两翼不对称和两翼连筋式,可供钻进不同性质岩石 时选用。钻杆由 B19 或 B22(少数)六角中空钢加工。经多年联合攻关,锚杆钻头和钻杆已 能初步满足一定条件下锚杆支护的需要。
但是,由于锚杆孔钻进设备的开发、研究和生产与锚杆支护技术的迅速发展不相适 应,煤矿锚杆支护施工中大量使用的还是传统气动凿岩机与煤电钻。专用锚杆孔钻进设 备中,使用国外进口设备较多,但因进口设备价格高和备件供应不及时,煤矿用户希望 采用国产的锚杆孔钻进设备。近来,石家庄煤矿机械厂生产的 MQT-50C 系列气动锚杆钻 机已能逐步代替国外进口的齿轮马达式锚杆钻机;正定煤矿机械厂的 ZYX 系列液压锚杆 钻机在与 S100 掘进机配套使用中,取得可喜进展;国产柱塞气动马达式锚杆钻机逐步投 入市场;澳大利亚 CRAM 气动锚杆钻机在中国已建立专业维修公司,并在元件的中国国产 化方面取得一些进步。这都有宜于使锚杆钻机进一步满足锚杆支护发展的需要。然而, 可靠性高、性能优异的国产化锚杆钻机还为数不多,与锚杆钻机配套的钻具规格不全、 质量不稳定和适应岩石条件有限。
掘锚机产品规格及大部件
1 技术说明1.1 简介山特维克矿山工程机械有限公司的MB 670掘锚机是为了适应长壁开采工艺的需要,加快巷道掘进速度而设计的锚掘一体化快速掘进机。
它具有连续采煤机的宽截割滚筒,并且具有其独特的截割和装载设计性能。
锚杆机是掘锚机的重要组成部分。
MB 670掘锚机配装四台顶板锚杆机和两台侧帮锚杆机。
所有顶板锚杆机和侧帮锚杆机都布置在靠近截割滚筒后面。
这种设计使得掘锚机能够同时进行掘进和锚护作业。
为了最大程度改善操作人员的工作环境,MB 670掘锚机装备了防尘帘和吸尘除尘通道。
该机器集成熟的技术为一体,掘进速度快。
山特维克矿山工程机械有限公司集多年之经验,领业内之先驱,开理念之先河。
山特维克矿山工程机械有限公司MB 670掘锚机的设计采用了山特维克矿山工程机械有限公司掘进机同样的原理,所造出的设备开机率高,性能好。
山特维克矿山工程机械有限公司MB 670掘锚机与其他设备不同的特点:∙掘进与打锚杆同时作业;∙截割滚筒安装高压水冲刷系统;∙大功率低转速的截割滚筒,使截割过程中产生的粉尘降至最低;∙机载顶板、侧邦锚杆机;∙装载和输送装置能相对于截割装置独立运动,以取得最好的装运效果;∙锚杆机工作平台完全处于液压顶篷安全保护之下;∙截割头掏槽和截割作业都由电子控制,使截割电机工作负载及切割程序最优化;∙除了锚杆机之外,掘锚机为无线遥控;∙履带对地比压低;∙利用液压缸推力掏槽,履带原地不动,既使软底板,也不会遭到破坏;∙在截割滚筒之后液压支撑架对顶板及时支护,保护操作人员;∙全自动油脂润滑系统,减小维修工作量。
1.2 截割断面截割高度取决于打锚杆高度。
截割高度不能大于打锚杆高度。
a bdec截割断面矩形宽度[mm] a 5200铲板收缩后[mm] b 4700切割滚筒收缩后[mm] c 4700切割/支护高度[mm] d 2260到 3450降下顶梁[mm] e 20002 掘锚机原理-主要部件山特维克矿山工程机械有限公司MB 670掘锚机是为了适应长壁开采工艺的需要,加快巷道掘进速度,截割煤层巷道,高度在 2260 [mm] 到 3450 [mm] 之间, 而1 截割大臂 + 电动机2 截割滚筒 + 减速箱3 滑动机架4 铲板5 主机架6 刮板运输机7 履带8 后液压稳定架(橡胶防撞装置)9 液压支撑架10 邦锚杆机11 除尘通道12 电控箱13 液压设备14 供水装置15 顶板锚杆机16 集中润滑装置17 支撑架液压缸18 支撑架稳定梁2.1 截割装置截割装置由截割臂、切割电机、切割齿轮箱和截割滚筒组成。
各型号掘进机参数(全)

长:9.1m卧底深度:290mm行走速度:0~9m/min 液压泵排量:145+145ml/r截割头伸缩量:500mm截割电机功率:132/75kW总功率:214.5kW整机重量:41.5t(含二运)高:1.55m(机身)/1.9m(截割头)宽:2.6m(铲板)/2.23m(履带)截割头转速:47/23.5rpmEBZ160参数行走速度:0~7m/min 液压泵排量:145+145ml/r长:10.1m卧底深度:200mm截割头伸缩量:550mm截割电机功率:160/100kW总功率:261kW整机重量:48t(含二运)高:1.6m(机身)/1.9m(截割头)宽:3.0m(铲板)/2.4m(履带)截割头转速:46/23rpmEBZ160截割范围:EBZ160H参数行走速度:0~8m/min 液压泵排量:145+145ml/r卧底深度:160mm截割电机功率:160/100kW长:10.4m总功率:309kW整机重量:52t(含二运,除尘)高:1.6m(机身)/2.2m(截割头)宽:2.6m(铲板)/2.4m(履带)截割头转速:46/23rpmEBZ200参数液压泵排量:145+145ml/r行走速度:0~8m/min卧底深度:400mm截割电机功率:200/110kW长:10.6m总功率:321kW整机重量:59t(含二运)高:1.8m(机身)/2.3m(截割头)宽:3.6m(铲板)/2.6m(履带)截割头转速:46/23rpmEBZ200截割范围:高:5.5m宽:6.5m面积:33平米EBZ200H参数整机特点:大截割面:30m3一次成型宽:3.6m(铲板)/2.7m(履带)液压泵排量:190+145+100ml/r截割头转速:46/23r/min行走速度:0~6.5m/min卧底深度:200mm截割电机功率:200/150kW长:11.5m总功率:384kW整机重量:86t (含二运、除尘装置)高:2.0m(机身)/2.43m(截割头)液压泵排量:190+145ml/r宽:3.6m(铲板)/2.7m(履带)截割头转速:46/23rpm行走速度:0~7m/min卧底深度:420mm截割电机功率:230/135kW长:11.1m总功率:377kW整机重量:69t(含二运)高:1.8m(机身)/2.3m(截割头)截割伸缩行程:550mmEBZ230H参数液压泵排量:190+145ml/r宽:3.6m(铲板)/2.6m(履带)截割头转速:37rpm行走速度:0~6.5m/min卧底深度:190mm截割电机功率:230kW长:11.4m总功率:414kW整机重量:77t (含二运、除尘装置)高:1.7m(机身)/2.22m(截割头)EBZ260A参数行走速度:0~6.5m/min 宽:3.6m(铲板)/2.62m(履带)卧底深度:200mm长:12.4m截割头转速:55/27rpm液压泵排量:190+145+145ml/r截割电机功率:260/200kW总功率:472kW整机重量:100t(含二运、除尘系统)高:1.8m(机身)/2.45m(截割头)EBZ260D参数行走速度:0~6.5m/min 截割头转速:55/27rpm截割电机功率:260/200kW宽:3.6m(铲板)/2.77m(履带)卧底深度:384mm 长:12m液压泵排量:190+145+145ml/r总功率:472kW整机重量:91t (含二运、除尘装置)高:2.03m(机身)/2.55m(截割头)EBZ260H截割头转速:37rpm行走速度:0~6.5m/min液压泵排量:190+190+16ml/r宽:3.6m(铲板)/2.62m(履带)卧底深度:185mm截割电机功率:260kW长:11.88m总功率:444kW整机重量:90t(含二运、除尘系统)高:1.72m(机身)/2.26m(截割头)EBZ318H参数行走速度:0~5.5/8.5m/min高:2.22m(机身)/2.7m(截割头)整机重量:125t(含二运、除尘装置)总功率:570kW液压泵排量:260+190+145ml/r长:13.1m卧底深度:220mm宽:3.8m(铲板)/2.93m(履带)截割电机功率:318kW截割头转速:31.8rpm。
掘锚一体机
180°
锚杆机前后伸缩行程mm
1000
m200马达额定转速rmin360钎尾六方尺寸mms2219锚杆机自身旋转角度180锚杆机前后伸缩行程mm1000
产品类别:
掘进机系列
产品型号:
掘锚一体机
适应条件:
巷道掘进
点击次数:
5858
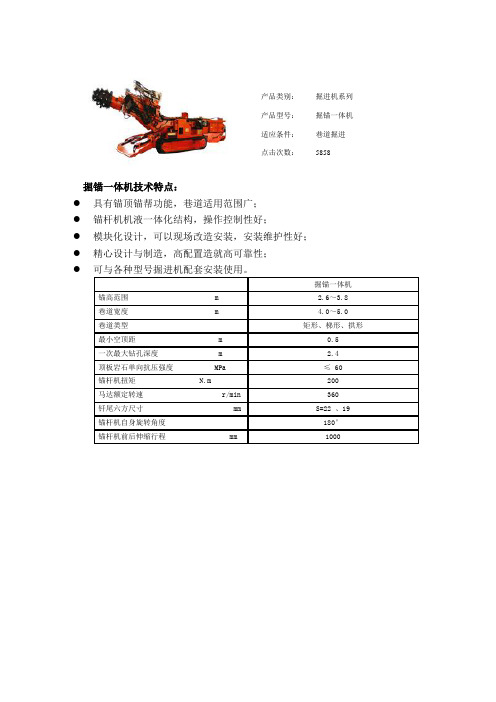
掘锚一体机技术特点:
具有锚顶锚帮功能,巷道以现场改造安装,安装维护性好;
精心设计与制造,高配置造就高可靠性;
可与各种型号掘进机配套安装使用。
掘锚一体机
锚高范围m
2.6~3.8
巷道宽度m
4.0~5.0
巷道类型
矩形、梯形、拱形
最小空顶距m
0.5
一次最大钻孔深度m
2.4
顶板岩石单向抗压强度MPa
≤60
锚杆机扭矩N.m
200
马达额定转速r/min
360
钎尾六方尺寸mm
S=22、19
ABM20 掘锚机(标准型)
BERGTECHNIK VOEST-ALPINEVOEST-ALPINE Bergtechnik P.O. Box 2, Alpinestrasse 1 A-8740, Zeltweg, AUSTRIA Phone : (+ 43 ) 3577 755 – Ext. Fax : (+ 43 ) 3577 756 – 334奥钢联公司北京办事处中国北京市朝阳区光华路7号 汉威大厦西区18层 邮编:100004电话:86 10 6561 0136 传真:86 10 6561 39461 技术说明***1.1 简介奥钢联ABM20掘锚机是为了适应长壁开采工艺的需要,加快巷道掘进速度而设计的锚掘一体化快速掘进机。
它的外形看似传统的煤层连续采煤机,但具有其独特设计和优点。
锚杆机是掘锚机的重要组成部分。
ABM20掘锚机可以配装2~4台顶板锚杆机和台侧帮锚杆机。
所有顶板锚杆机和两台侧帮锚杆机都布置在靠近截割滚筒后面。
另外两台侧帮锚杆机布置在掘锚机的后部。
这种设计使得掘锚机能同时进行掘进和打锚杆工作。
为了最大程度改善操作人员的工作环境,ABM20掘锚机装备了吸尘和除尘通道。
奥钢联公司将它丰富的掘进机实践经验和成熟的技术,汇集到这种高效采掘设备上。
ABM20掘进机与众的特点:掘进与打锚杆同时平行作业 高压水/气喷雾系统。
大功率低转速的截割滚筒,使截割过程中产生的粉尘降至最低机载顶板、侧邦锚杆机装载和输送装置能相对于截割装置独立运动,以取得最好的装运效果锚杆机工作平台处于液压顶篷安全保护之下截割头掏槽和截割都由微机控制,使截割循环以及电机工作负载最优化除了锚杆机之外,掘锚机为无线遥控对地比压低掏槽时履带原地不动,因此不破坏软底板在截割滚筒之后液压支护顶篷对顶板及时支护,保护操作人员全自动油脂润滑系统,减小维修工作量***奥钢联保留对技术参数变更的权利。
1.2 技术参数11.2.1 总体总长 [mm] 10750总宽(运输) [mm] 4400总高(运输) [mm] 2500总重 [t] 约85总装机功率 (1140 [V], 50 [Hz]) [kW] 510总宽(工作) [mm] 4900~52000总高(工作) [mm] 2800最大截割高度 [mm] 36004000或4100 最小截割高度 [mm] 2800运输高度 [mm] 2500履带两侧宽 [mm] 2896对地比压 [N/cm] 20卧底量 [mm] 270 1.2.2 截割系统截割巷道断面 矩形截齿型式 长柄圆形降尘 截割滚筒支架喷水/气截割高度 [mm] 2800 to 3600截割宽度 [mm] 4900截割滚筒收缩量(液压) [mm] 2 x 250截割滚筒直径 [mm] 1150截割滚筒速度 [rpm] 25 (1.5 [m/sec])掏槽速度(可变) [mm/sec] 20 - 50截齿间距 [mm] 90最大垂直截割力 [kN] 300功率 [kW] 270掏槽方式 水平液压缸/滑道减速机支架最大宽度 [mm] 801.2.3 锚杆机系统支护顶蓬距工作面 [mm] 约1000顶板锚杆机(中间)距工作面 [mm] 约1870中间两根锚杆相距 [mm] >860顶板锚杆数 2 - 4锚杆长(单根) [mm] 2100 or 2400侧邦锚杆机 2~4;左、右两侧锚杆类型 树脂锚杆钻孔方式 旋转钻孔直径 [mm] 20 - 50紧锚杆扭矩 [Nm] 270 - 380钻机推力 [kN] 15 - 23 1.2.4 支护系统对顶板总支承力 [kN] 2 x 200 1.2.5 装载系统装载装置 星形集装臂装载能力 [t/min]25装载宽度 [mm]4270 - 4900电机功率 [kW] 2 x 36装载宽度可调量 [mm] 2 x 315 1.2.6 输送系统输送机宽度 [mm] 760输送机链速 [m/sec] 2.1输送机能力 [t/min] 25输送机尾部悬空距 [mm] 2730输送机尾部悬空距(掏槽时) [mm] 1730输送系统能力 [t/min]25输送机电机功率 [kW] 1 x 361.2.7 行走系统行走速度 [m/min] 5.5 / 11.0机身距地面净空高 [mm] 270对地比压 [N/cm²] 20履带牵引力Track pulling force [kN] 2 x 300履带两侧宽 [mm] 2896履带与地面接触面长度 [mm] 34001.2.8 抑尘系统ABM20掘锚机装有水气混合喷雾降尘系统。
掘锚机(奥钢联)图册
1 TECHNICAL DESCRIPTION1.1 GeneralThe ALPINE BOLTER MINER ABM20 was designed for rapid entry roadway development. It is basically a widehead Continuos Miner incorporating special design features with re-gards to coal cutting and loading.Bolting rigs are an integrated part of this machine. The layout of the ABM20allows space for 4 roof bolters and 2 rib bolters. All drill rigs as well as the rib bolters are placed immediately behind the cutter-drum.This design enables a simultaneous cutting- and bolting operation.In order to optimize the conditions for operators and face crew the machine is fitted with dust curtain and an onboard dust collecting channel.The emphasis is an integration of well proven technology into one machine which gives better advance rates. All of the VOEST-ALPINE's experience as a leading mining ma-chine manufacturer, has been put into this innovative concept.The ALPINE BOLTER MINER ABM20 was designed on the same principles as VA-Road-headers resulting in a machine with greater availability thus giving higher perfor-mance rates.ALPINE BOLTER MINER ABM20 features which are not available on other rapid en-try machines:•Simultaneous cutting and bolting op-eration.•Integrated high pressure water flush-ing system for cutting drum.•Low rotation speed of the cutter-drum and high installed power, to reduce dust development to a minimum.•Onboard rib bolting rigs.•The loading- and conveying unit moves independently from the cutting device in order to achieve best loading efficiency.•Fully shielded bolting platforms.•Electronic controlled sump- and shear-movement to optimize the cutting se-quence as well as the work of the cut-ter motor.•Radio remote control system for all functions - except drilling operation.•Low ground pressure of crawler tracks.•No movements of crawler tracks dur-ing sumping action (therefore no de-struction of floor in soft conditions).•Fully supported roof for operators due do support-canopy behind the cutter drum.•Fully automated greasing system for low service requirements.1.2 DimensionsALPINE BOLTER MINER ABM201656.56900.673 Ashowing a machine with operating height of 3.0 to 4.0 m (other operating heights like 2.8 to 3.8 m are also available)1 All dimensions and technical data are theoretical figures. The values are within the usual tolerances.1.3 Technical dataSerial No.:1.3.1 Generaloperation tramming Total length (without additional conveyor)[mm] approx. 10750Total width [mm] 5000 4600Total height, min. [mm] 2800 2600Total weight [t] approx. 94Max. ground pressure [N/mm²] approx. 22Ground clearance [mm] 2701.3.2 Cutting system - widehead drum MinerMax. vertical cutting (shearing) force [kN] 300 Sumping aid longitudinal hydraulic slide Installed power [kW] 2701.3.3 Bolting systemDistance roof support to face [mm] approx. 1500/1800 Distance roof - rib [mm] approx. 1200 Distance between center bolts [mm] > 860 No. of bolts / W. strap 2 - 8 Bolt length (single pass) [mm] 2000 or 2400 Rib bolting left and right Bolt type Chemical Drilling Rotating Drill diameter [mm] 20 -50 Tightening torque [Nm] 270 - 380 Drilling thrust [kN] 15 - 231.3.4 Support canopyTotal force supplied to the roof [kN] 2 x 2001.3.5 Loading systemLoading device Conventional spinners Loading capacity [t/min] 25 Loading width [mm] 4400 - 5000 Installed power [kW] 2 x 361.3.6 Conveying systemConveyor width [mm] 760Conveyor chain speed [m/sec] 2.1Conveyor capacity [t/min] 25Conveyor overhang [mm] 2660 - when cutter boom is sumped in [mm] 2130 Installed power [kW] 2 x 361.3.7 TrammingTramming speed, variable [m/min] 3.5 / 7.0 / 15.0Track overall width – outside of the tracks [mm] approx. 29001.3.8 Dust suppression (optional)High pressure water system on the cutter boom for dust suppression in the immediate cutting area and for methane dilution.Ventilation duct for dust collection integrated in cutter boom.1.3.9 HydraulicsTank capacity [l] approx. 400Total oil quantity [l] approx. 6001.4 Cutter head profileThe cutting height is always depending on the bolting height, you can never cut higher than you can install roofbolts.a bdecShape for profile RectangularWidth [mm] a 5000Apron retracted [mm] b 4400Cutter drum retracted [mm] c 4600Cutting/Bolting height [mm] d 2800 to 3800Canopy lowered [mm] e 26002 MACHINE CONCEPT - MAJOR COMPONENTSThe ALPINE BOLTER MINER ABM20 is designed for rapid roadway development in lower seams reaching from 2800 [mm] up to 3800 [mm] seam high, allowing high ad-vance rates while remaining at face for efficient long-wall development drivage. The1 Cutter boom with E-Motor2 Cutter drum with gear box3 Slide frame4 Loader apron with drives5 Frame6 Chain conveyor7 Track8 Stab jacks (rubber bumper)9 Canopy 10 Rib bolter11 Dust collector12 Electric equipment13 Hydraulic equipment14 Water supply15 Roof bolter16 Multi line lubrication unit17 Canopy jacks18 WishboneDate: March 20062.1 Cutter moduleThe cutter assembly comprises the cutter boom, the cutter motor, the cutter gear and the cutter drum.The cutter boom is a single piece solid steel structure.The gear box is a spur-bevel-planetary drive arrangement.1 Cutter boom2 Bearing, lifting cylinder3 Bearing, cutter boom4 Lifting cylinder, cutter boom5 Motor cover, E-Motor6 Gear box7 Inner cutter drum8 Outer cutter drum9 Drum extension flaps, right / left689725314Date: March 20062.1.1 Cutter drumCutter Drum Type(see your parts list)ABM20 – 5.0 m76 mm (3”) – spacingpart number 656.59520.xxxoptimum application conditions Material with 50 MPa maximum compressive strength.tipped with 2 x 45 pick boxes suitable for 30mm shank-diameter picks.used with cutter gear boxtypeABM20diameter 1150 mm (451/4“)width 5000 mm (16’-47/8“)width retracted 4600 mm (15’-11/8“)max. cutting speed 1.54 m/s at 50 Hz1.85 m/s at 60 Hzoptimum sump-in andshear-down speed0.04 m/s at 50 Hz0.05 m/s at 60 Hzspraying system(see your parts list)None or externalCopyright © VAB - R&D Cutting Technology 2006. All rights reserved.Date of issue: February 20062.1.2 Gear boxThe gear consists of one spur wheel step, one bevel gear step with intermediate wheels and each two planet gear steps on drive side.Nominal power [kW] 270Input speed [U/min] 1475(bei 50 Hz)Input torque [Nm] 1749Output speed [U/min] 25.62Ratio, i [rpm] 25All mating surfaces are sealed by O-rings or suitable sealing compounds against oil pene-tration. The driving shaft bearing is provided with shaft gaskets, the driven shaft bearingsare sealed with a rotating mechanical seal.2.2 Sledge(Sliding part of the main frame)The sledge allows sumping of the cutting unit while the remaining parts of the machine keep stationary. This is why you can cut and bolt simultaneously!The sledge is fitted with Brass bushes to slide on the guiding rods.and thewhich isfor theconveyor allows the movementload-con-1 Sledge2 Bearing, cutter boom3 Bearing, sumping jacks4 Bearing, shearing jacks5 Sliding stone, conveyor6 Slide bearing for guiding rods7 Ledge of grease points8 Guiding rods2.3 Loading equipmentThe loading assembly comprises the apron, two spinner and conveyor transmissions and two spinners for gathering the material.The conveyor and the spinners are driven by two electric motors via bevel-spur gear transmissions.The loading assembly moves forward when the cutter drum is sumped in, this guarantees best loading efficiency.1 Extension2 Roller (conveyor chain)3 Spinners4 Extension jacks5 Electric motors6 Lifting jacks7 Spinner and conveyor gear boxes2.3.1 Spinner and conveyor gear boxThe loading drive is a combination of a spur gear and a bevel gear. Each gear-side is driven by one electric motor.The electric motor on the right must turn counter-clockwise, that on the left must turn clockwise!Technical DataNominal input power [kW] 36Nominal input torque [Nm] 239Output revolutions [rpm] 48,5Nominal output torque [Nm] 7088Ratio, i 29,72.4 Chain conveyorThe conveyor is rear driven by one 36 [kw] electric motor with the gear box positioned on the rear end of the conveyor.The vertical slewing movements are performed by hydraulic cylinders.The chain is a standard 3 pitch x 29.0 [in] wide continuous Miner flight chain.1 Front part2 Rear part3 Bolt connection4 Tensioning device5 Driving station6 Lifting cylinder7 Slidestone conveyor 8Chain2.5 Track EquipmentThe crawler track assembly is of rugged design to suit toughest mining conditions and is totally enclosed to keep out dirt. Each of the track assemblies consists of take-up pulley, take-up sprockets, drive sprocket, drive unit and crawler. The center part of the track as-sembly moves on wear-resistant slides.The crawler system is driven by two hydraulic motors with multiple disk brake which is hydraulically released. In case of a hydraulic pressure drop the brakes immediately re-spond and prevents further movement of the MINER.The track chains are tensioned via cylinders.1 Gear boxes with brakes2 Drive sprockets3 Track frames4 Hydraulic motors5 Track chains6Deflection rollersDate: March 20062.5.1 Track gear boxThe hydraulic motor is directly flanged to the gear box.Technical DataMax. input power [kW] 75Nominal input revolutions [rpm] 2000Max. input torque [Nm] 715Max. output torque [Nm] 686432.6 Main FrameThe main frame is a rigid single piece structure (a four-piece steel structure as shown in the outline drawing is quoted as optional item). It carries all other assembly groups.A four-piece steel structure main frame as shown in the outline drawing is quoted as op-tional item. This is dismountable to suite transportation requirements. The four compo-nents are flanged together using bolts, key and shear pins.Two hydraulically operated stabilizers are fitted at the rear end and serve as an additional support during sumping and cutting.1 Inner frame, sump jack inside2 Track frame on the right3 Track frame on the left4 Rear stabilizers, jacks inside5 Guide bars6 Connecting bolts2.6.1 Rear stabilizerThe rear stabilizers are integrated in the main frame. They stabilize the machine during cutting. The jack may be individually lifted and lowered on both sides.The stroke of the jack is 530 mm. Maximum reach belowfloor is about 300 mm.The purpose of the stab shoe is to transfer machine weight tothe front of the machine to assist in shearing down into theface. In addition, it provides solid support for the rear of the machine which will attempt to lower during the shear down cycle.The stab jack can also be used as a service jack to raise the machine for maintenance.1 Jack2 Skid1 22.7 Electrics•The electrical equipment is designed to FLP standard.The electric equipment of the ALPINE BOLTER MINER ABM20, is designed to work on 1140 V / 50 Hz.The electric equipment is based on the application of the protective conductor system. All parts of the electric system which have body contact are connected with a protective con-ductor.The control system permanently is monitored on earth fault. In case of an earth fault the control circuit is disconnected.All switch gear are placed in a flameproof (FLP) enclosure (machine distributor) to where motors, head lights, solenoids, transducer, warning horn and trailing cable are connected to.The electrical equipment incorporates latest technology with respect to:•health monitoring,•sumping speed control depending on current draw of cutter and loaderdrives, •radio remote control system, •Display in Chinese• methane monitoring.2.7.1 Electric DrivesAll drive motors are of 3 phase squirrel cage type and direct on line started, which requires stable power supply.2.7.2 Control SystemThe control system comprises two units:•the receiver/monitoring unit and•the radio remote control transmitter.Coded radio signals from a portable transmitter are processed and converted into appro-priate solenoid and interposing relay selections, which in turn control the various func-tions of the ALPINE BOLTER MINER.The system monitors the fault- and position sensors located around the ALPINE BOLTER MINER and provides the operator with a detailed machine status on a built-in liquid crys-tal display (LCD).Receiver/Monitoring UnitThe unit is located on the ABM20 and performs the following functions:•The Receiver/Monitoring Unit con-tains the input/output section.•The solenoids and the interposing re-lay drivers are monitored by the unit to ensure correct operation.•The LCD status screen informs the operator of the current boom positionand any operational warnings or faults detected on the machine.•The unit decodes the digital infor-mation from the radio transmitter into signals that drive the solenoids and in-terposing relays which, in turn, drive the contactors on the ALPINE BOLTER MINER ABM20.Date: March 2006Radio Remote Control TransmitterThe transmitter provides the operational interface to the machine. The unit provides the following features:•It contains 12 switches which are con-tinuously scanned by a microprocessor, encoded into a digital bit stream and then transmitted via radio signals to the Receiver/Monitoring Unit.•The unit is housed in a heavy duty PVC case with stainless steel face plate and is carried in a leather case by means of shoulder straps for operators comfort.•The transmitter incorporates a time out function which turns the unit off nom-inally 2 minutes after the last key se-lection (programmable delay).•If the radio signal between the opera-tor and the ALPINE BOLTER MINER is lost or jammed the machine is switched off.•Power for the transmitter is supplied by a built-in 7.2 [V]/1.2 [Ah] battery pack which provides for up to 16 hours of operation.2.8 HydraulicsThe hydraulic unit of the ALPINE BOLTER MINER comprises of the unpressurized hydraulic tank, the piston-pump group, the control system, the accessories as well as the pipe lines.The hydraulic system operates with open circuits. The standard hydraulic components are designed for hydraulic oil. The hydraulic power pack is driven by one electric motor.1 Hydraulic tank2 Pump combination3 E-Motor4 Coupling5 Heat exchanger6 Solenoids7 Level indicator8 Air filter9 Air filter indication10 Pressure filter11 Pressure filter indica-tion2.9 Cooling and Spraying System2.9.1 Dust suppression• A ventilation duct for dust collection is integrated in the machine.•For dust suppression and for dilution of methane, the machine is equipped with a water spraying system.2.9.2 Water spraying systemThis spraying system is using specific ITP-spray nozzles (I NCENTIVE T EMPERATURE P OTENTIAL). These nozzles provide the danger area with water and air. The additional airflow is caused by the exceptional characteristics of the ITP-spray nozzles.The system consists of several spray bars. Usually two behind the cutter drum and two at the loading table (apron).2.10 Bolting SystemThe bolting system comprises 4 roof bolting rigs and two rib-bolters in front of the ALPINE BOLTER MINER. This configuration allows rapid advance with simultaneous cutting and roof bolting and rib-bolting. The roof bolters are mounted on joints providing a wide range of bolt placements across the roadway width.For conventional continuous miners it is difficult to sump in with crawler tracks if the coal is hard. Therefore the ABM20 uses the support canopy to hold the machine in posi-tion while sumping the drum into the face per controlled cylinder force. The canopy also increases safety for operators.The bolting equipment comprises:1 Roof-bolter (4x)2 Rib-bolter (2x)3 Stabilizing systemwith two canopyjacks4 Support canopy5 Floor pad (2x)6 Working platform (2x)7 Control panelfor roof bolting(4x)8 Control panelfor rib bolting (2x)•The roof bolting rigs can be tilted left, right, forward and backward .•The rib-bolters are located at the working platforms in the back of the operator.•The rib-bolters can be tilted up and down to put in the bolts in various heights.•The rib-bolters can be lifted up- and downwards in a range of 400 mm to achieve max.flexibility for the bolting pattern.。
掘锚一体机暨前配套操作规程
掘锚一体机暨前配套操作规程掘锚一体机暨前配套操作规程掘锚一体掘进设备的使用在一定程度上可以提高掘进工作面的机械化强度,减轻工人的劳动强度。
我矿引进芬雷公司的掘锚一体前支护配套主要由延伸油缸、龙门机架、临时护顶、钻臂系统等组成,掘进机通过液压系统为配套设备提供动力。
一、机构组成1、龙门机架2、TRS临时支护系统3、S4200钻臂4、延伸机构二、操作顺序1、断面切割成形后,将工作面浮煤清空,掘进机炮头着地,铲板着地;2、掘进机司机到达机载前配套操作台,切换操作手柄至“锚杆”模式;3、操作机架前倾手柄,前倾龙门机架,越过铲板及炮头;4、操作机架伸缩手柄,启动前配套延伸油缸,将TRS前支撑系统送至窝头适当位置;5、操作机架前倾手柄,垂直龙门机架,打开钻臂控制阀TRS手柄启动TRS支撑系统,直至四个前支撑盘分别顶紧巷道顶、底板;6、展开锚钻工作台,两名操作人员从掘进机侧面登上工作台,将临时支护网片一边与永久支护网局部联网,左、中、右各联一处,每处3扣以上。
后面两人将临时支护网用钢筋梯子梁推起,将钢筋梯子梁放置标定位置,工作台上两人通过操作钻臂横向移动手柄将钻臂横向移至顶锚杆标定位置,操作临时撑柱手柄,升起钻臂临时撑柱顶紧钢筋梯子梁,然后将临时支护网与永久支护网孔孔相联。
7、由钻臂工作台上人员操作双重支护手柄使机架顶紧临时撑柱上顶板后,操作锚钻进给手柄,使锚钻上升至打顶位置。
8、打顶眼:操作人员将1.2米钻杆夹入钻机孔,开钻并给锚杆钻机加压,同时水路供水,钻孔到位后,下缩钻机到下极限位置后,停钻换2.4米长钻杆,重复上述动作完成打眼。
(顶锚杆孔深为2300mm);9、安装顶锚杆:先把锚垫、半球垫、快速安装器套在锚杆上,再把树脂药卷依次装入钻孔并用锚杆将药卷送到孔底,并将专用搅拌器插入钻机夹盘内,然后边搅拌边推进,直到将锚杆送入孔底;10、紧固锚杆:等待1分钟,开动钻机旋转螺母,缩回持续进给油缸至下极限位置;11、联帮网:先用洋镐敲掉两帮活煤矸,搭好工作台,铺网并将帮网与顶网及上一排帮网孔孔相联。
EBM340掘锚机组PPT-taiyuan
IMM JMJ │16 July 2013 │EBZ260F掘进机介绍
小结
EBM340 掘锚机组
试验验证的破记录的掘锚机组
Vorgashorvskaya煤矿 俄罗斯 – 2009年8月进尺1005m – 2010年3月进尺1200m 锚杆到工作面距离最小可达2m 高的可靠性&逐步改进的液压、水系统 升级的运输部及后支撑靴
煤矿: Vorgashorskaya 地点:俄罗斯 北乌拉尔 纬度67度 起始日期:2009年2月 早期进尺:750m 2009年5月 最好进尺:1005m 2009年8月
• 爆炸性新闻:2010年3月进尺1200m
• • 领导视察祝贺这一重要事件 • 机器到达煤矿 祝贺这一成绩的采矿海报
4个顶锚杆(倾斜/旋转)+ 2个帮锚杆(升高/倾斜) 电机: 截割 : 2 x 170kW 泵站 : 2 x 45kW 运输机 : 1 x 37kW 行走部 : 2 x 60kW (AC 变频驱动 ) 除尘风机: 1 x 26kW 共计 : 613kW
IMM JMJ │16 July 2013 │EBZ260F掘进机介绍
Test #
压力
Press kPa
流量
Flow m3/s
3.5 3
2 3 4 5 6
0.505 0.78 1.22 1.94 2.41
6.431 6.061 5.769 5.234 4.505
Pressure [kPa]
2.5 2 1.5 1 0.5 0 0 1 2 3 4 5 6 7
Flow [m^3/s] 系列 1 多项式 (系列 1)
• 吸入口
• 管道
• Demister unit • 湿除尘器 • Fan & motor • 风扇&电机
掘锚机文档
掘锚机掘锚机是一种用于地下工程中的机械设备,主要用于在地下隧道或矿山中进行锚杆的安装和锚杆孔的钻探。
1. 概述掘锚机是一种重型设备,通常由发动机、钻杠、转台、推杆和钻探部分等组成。
它的主要功能是在地下工程中进行锚杆的安装,以加固和稳定岩体,并确保隧道或矿山的安全性。
2. 原理掘锚机的工作原理是通过转动钻杠使其在地下地层钻孔,然后安装锚杆,并用力将锚杆推入地层。
在这个过程中,机器还会通过推杆向前推进,以便进行下一个钻孔。
3. 组成部分掘锚机通常由以下几个主要部分组成:•发动机:提供动力以使机器能够进行钻杠转动和推进。
•钻杠:负责钻探孔洞,并安装锚杆。
•转台:支持钻杠转动并可以调整钻孔方向。
•推杆:用于推进机器前进。
•钻探部分:包括钻头和钻杠等,用于完成钻孔任务。
4. 使用场景掘锚机主要在地下工程中使用,如隧道施工、矿山开采等。
它可以钻探孔洞并安装锚杆,起到加固和稳定地层的作用,从而确保地下工程的安全进行。
5. 控制方式掘锚机通常通过操纵台上的控制杆或按钮来进行操作。
这些控制方式可以控制机器的钻杠转动速度、推杆的推进速度以及转台的角度调整。
此外,掘锚机还可以配备遥控器,使操作人员可以在安全位置远程控制机器的操作。
6. 优点与限制掘锚机的优点包括:•提高工作效率:掘锚机能够自动进行钻探和锚杆安装任务,大大提高了工作效率。
•加固地层:锚杆的安装可以加固地层,提高地下工程的稳定性。
•提供安全防护:掘锚机的操作人员可以通过遥控器控制机器进行钻探,从而减少了对操作人员的安全风险。
掘锚机的限制包括:•依赖外部能源:掘锚机通常通过发动机提供动力,需要外部能源支持才能进行工作。
•仅适用于特定工程:掘锚机主要用于地下工程中,对于其他场景可能不适用。
7. 维护与保养为了确保掘锚机的正常运行,需要定期进行维护与保养。
以下是保持掘锚机良好状态的一些建议:•定期更换机油和滤芯,保持发动机的良好润滑。
•清洁钻杠和钻探部分,防止堵塞或损坏。
掘锚机产品规格及大部件
1 技术说明1.1 简介山特维克矿山工程机械有限公司的MB 670掘锚机是为了适应长壁开采工艺的需要,加快巷道掘进速度而设计的锚掘一体化快速掘进机。
它具有连续采煤机的宽截割滚筒,并且具有其独特的截割和装载设计性能。
锚杆机是掘锚机的重要组成部分。
MB 670掘锚机配装四台顶板锚杆机和两台侧帮锚杆机。
所有顶板锚杆机和侧帮锚杆机都布置在靠近截割滚筒后面。
这种设计使得掘锚机能够同时进行掘进和锚护作业。
为了最大程度改善操作人员的工作环境,MB 670掘锚机装备了防尘帘和吸尘除尘通道。
该机器集成熟的技术为一体,掘进速度快。
山特维克矿山工程机械有限公司集多年之经验,领业内之先驱,开理念之先河。
山特维克矿山工程机械有限公司MB 670掘锚机的设计采用了山特维克矿山工程机械有限公司掘进机同样的原理,所造出的设备开机率高,性能好。
山特维克矿山工程机械有限公司MB 670掘锚机与其他设备不同的特点:•掘进与打锚杆同时作业;•截割滚筒安装高压水冲刷系统;•大功率低转速的截割滚筒,使截割过程中产生的粉尘降至最低;•机载顶板、侧邦锚杆机;•装载和输送装置能相对于截割装置独立运动,以取得最好的装运效果;•锚杆机工作平台完全处于液压顶篷安全保护之下;•截割头掏槽和截割作业都由电子控制,使截割电机工作负载及切割程序最优化;•除了锚杆机之外,掘锚机为无线遥控;•履带对地比压低;•利用液压缸推力掏槽,履带原地不动,既使软底板,也不会遭到破坏;•在截割滚筒之后液压支撑架对顶板及时支护,保护操作人员;•全自动油脂润滑系统,减小维修工作量。
1.2 截割断面截割高度取决于打锚杆高度。
截割高度不能大于打锚杆高度。
a bdec截割断面矩形宽度[mm] a 5200铲板收缩后[mm] b 4700切割滚筒收缩后[mm] c 4700切割/支护高度[mm] d 2260到 3450降下顶梁[mm] e 20002 掘锚机原理-主要部件山特维克矿山工程机械有限公司MB 670掘锚机是为了适应长壁开采工艺的需要,加快巷道掘进速度,截割煤层巷道,高度在 2260 [mm] 到 3450 [mm] 之间, 而1 截割大臂 + 电动机2 截割滚筒 + 减速箱3 滑动机架4 铲板5 主机架6 刮板运输机7 履带8 后液压稳定架(橡胶防撞装置)9 液压支撑架10 邦锚杆机11 除尘通道12 电控箱13 液压设备14 供水装置15 顶板锚杆机16 集中润滑装置17 支撑架液压缸18 支撑架稳定梁截割装置由截割臂、切割电机、切割齿轮箱和截割滚筒组成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 技术说明1.1 简介山特维克矿山工程机械有限公司的MB 670掘锚机是为了适应长壁开采工艺的需要,加快巷道掘进速度而设计的锚掘一体化快速掘进机。
它具有连续采煤机的宽截割滚筒,并且具有其独特的截割和装载设计性能。
锚杆机是掘锚机的重要组成部分。
MB 670掘锚机配装四台顶板锚杆机和两台侧帮锚杆机。
所有顶板锚杆机和侧帮锚杆机都布置在靠近截割滚筒后面。
这种设计使得掘锚机能够同时进行掘进和锚护作业。
为了最大程度改善操作人员的工作环境,MB 670掘锚机装备了防尘帘和吸尘除尘通道。
该机器集成熟的技术为一体,掘进速度快。
山特维克矿山工程机械有限公司集多年之经验,领业内之先驱,开理念之先河。
山特维克矿山工程机械有限公司MB 670掘锚机的设计采用了山特维克矿山工程机械有限公司掘进机同样的原理,所造出的设备开机率高,性能好。
山特维克矿山工程机械有限公司MB 670掘锚机与其他设备不同的特点:•掘进与打锚杆同时作业;•截割滚筒安装高压水冲刷系统;•大功率低转速的截割滚筒,使截割过程中产生的粉尘降至最低;•机载顶板、侧邦锚杆机;•装载和输送装置能相对于截割装置独立运动,以取得最好的装运效果;•锚杆机工作平台完全处于液压顶篷安全保护之下;•截割头掏槽和截割作业都由电子控制,使截割电机工作负载及切割程序最优化;•除了锚杆机之外,掘锚机为无线遥控;•履带对地比压低;•利用液压缸推力掏槽,履带原地不动,既使软底板,也不会遭到破坏;•在截割滚筒之后液压支撑架对顶板及时支护,保护操作人员;•全自动油脂润滑系统,减小维修工作量。
1.2 截割断面截割高度取决于打锚杆高度。
截割高度不能大于打锚杆高度。
a bdec截割断面矩形宽度[mm] a 5200铲板收缩后[mm] b 4700切割滚筒收缩后[mm] c 4700切割/支护高度[mm] d 2260到 3450降下顶梁[mm] e 20002 掘锚机原理-主要部件山特维克矿山工程机械有限公司MB 670掘锚机是为了适应长壁开采工艺的需要,加快巷道掘进速度,截割煤层巷道,高度在 2260 [mm] 到 3450 [mm] 之间, 而快速掘进机。
MB670掘锚机使用电源为动力。
工作区域采用液压支撑架支护顶板,为操作人员提供舒适,安全的工作环境。
1 截割大臂 + 电动机2 截割滚筒 + 减速箱3 滑动机架4 铲板5 主机架6 刮板运输机7 履带8 后液压稳定架(橡胶防撞装置)9 液压支撑架10 邦锚杆机11 除尘通道12 电控箱13 液压设备14 供水装置15 顶板锚杆机16 集中润滑装置17 支撑架液压缸18 支撑架稳定梁65429161011121415311317187 82.1 截割装置截割装置由截割臂、切割电机、切割齿轮箱和截割滚筒组成。
截割臂是整体钢结构件。
减速箱是直齿轮-斜齿轮-行星齿轮布置。
1 截割大臂2 提升油缸轴承3 截割大臂轴承4 截割大臂调高油缸5 电机盖6 齿轮箱7 内截割滚筒8 外未截割滚筒9 左右滚筒伸缩端6897 253142.1.1 截割滚筒MB 670 – 5.2 m 截割滚筒型号(see your parts list)76 mm (3”) –节距件号656.59520.xxx使用条件截割最大抗压强度为 50 MPa 的材料装有 2 x 45 齿座,适用于齿根为30毫米的截齿截割齿轮箱型号MB 670直径1150 mm (451/4“)宽度5200 mm (16’-47/8“)收缩回的宽度4700 mm (15’-11/8“)最大截割速度 1.54 m/s at 50 Hz1.85 m/s at 60 Hz掏槽及下截速度0.04 m/s at 50 Hz0.05 m/s at 60 Hz水喷雾系统不带或带外喷雾版权:山特维克矿山工程机械有限公司-2006年研究与开发的切割技术。
版权所有。
签发日:2006年2月2.1.2 齿轮箱齿轮箱由一级直齿轮,一级伞齿轮,加中间轮组成。
两个行星轮位于每个驱动端。
技术参数 功率 [kW] 270输入速度[U/min] 1475 (bei 50 Hz)输入扭矩 [Nm] 1749 输出速度[U/min]25.62转速[rpm]25为防止漏油,所有结合面都用O 形圈或胶合剂密封。
驱动轴轴承带有防护圈。
从动轴轴承采用旋转机械密封。
轴垫Transport-abdeckung轴承旋转机械密封运输护盖2.2 滑架(主机架滑动部分)水平滑动机架使得截割装置与运输机向前移动进行掏槽,而其他部件原地不动保持机身稳定。
这就是为什么掘锚机可以同时进行掘进与支护! 滑动机架滑槽内衬有铜套,用螺栓固定在主机架上的滑道内侧。
滑动机架支撑:1. 截割臂和滑动推力液压缸;2. 刮板输送机与铲板相连。
滑动机架仅允许输送机和前铲板有0.55m 的滑动范围。
滑动机架靠液压缸推动。
1 滑动机架2 截割大臂轴承3 掏槽油缸轴承 4截割油缸轴承5 运输机滑动槽6 导杆滑动轴承7 润滑点 8导杆7665 138242.3 装载机构装载机构包括前铲板、两台减速机和两个星形集装臂。
装载机构由两台36千瓦的电机,通过直齿轮-伞齿轮减速箱进行驱动。
当截割滚筒前移掏槽时,装载机构随之前移,保证装载工作的有效进行。
1 伸缩部2 滚轮 (运输机链)3 星形集装臂4 伸缩油缸5 电机6 调高油缸7 齿轮箱1237 5642.3.1 齿轮箱齿轮箱是一级直齿和一级伞齿轮。
每侧一台齿轮箱,各由一台电机驱动。
右侧电机转向必须是逆时针,而左侧电机转向必须是顺时针!技术参数输入功率[kW] 36输入扭矩[Nm] 239输出转速[rpm] 48,5输出扭矩[Nm] 7088传动比29,72.4 链式运输机输送机36千瓦的电机驱动。
电机和减速机安装在输送机尾部。
输送机采用液压油缸进行上下左右移动。
输送机刮板链条是连续采煤机标准链条(3x29[in])。
1 前部2 后部3 螺拴连接4 链张紧装置5 驱动装置6 升降油缸7 运输机滑槽8 链条8745 6 2132.5 履带行走机构高强度、全封闭的履带行走机构,以适应采矿的恶劣条件。
每个履带机构包括张紧轮、张紧链轮、驱动链轮、驱动装置和履带板。
履带机构中部为耐磨滑板。
履带行走机构由两台液压马达和液压盘式制动器组成。
在失去液压压力时,液压制动器将立刻动作避免掘锚机移动。
.履带靠油缸张紧。
1 带制动的齿轮箱2 驱动链轮3 履带架4 液压马达5 履带板6 偏转轮1345622.5.1 行走齿轮箱液压马达与齿轮箱直接靠法兰连接。
T技术参数最大输入功率[kW] 75 输入转速[rpm] 2000 最大输入扭矩[Nm] 715 最大输出扭矩[Nm] 686432.6 主机架主机架为整体钢结构件,主机架承载所有其他装置。
主机架尾部装有两台液压稳定支撑架。
当掘锚机掏槽和截割时候,支撑架用来稳定机身。
1 掏槽油缸内侧的内架2 右履带架3 左履带架4 后稳定装置5 导杆6 连接螺栓13245 62.6.1 后稳定装置主机架尾部装有两台稳定支撑架。
当掘锚机掏槽和截割时候,支撑架稳定住机身。
两侧油缸可独立升降。
油缸行程530[mm]。
低于地面最大300[mm]。
液压稳定支撑架的用途是将机器重心前移,增大截割头下切力。
另外,截割时稳定住机身。
1当维修履带时,液压稳定支撑架还可以抬起机身。
1 油缸2 底座22.7 电气➢电气设备设计符合防爆标准。
山特维克矿山工程机械有限公司MB 670掘锚机采用1140 V / 50 Hz 工作电源。
所有电气设备都采用漏电保护系统。
电气系统中所有与人接触的部件都与漏电保护系统相接。
控制系统始终处于被监视状态,以防漏电。
一旦漏电,将断开控制回路。
所有开关都安置在防爆电控箱内。
电机、前照明灯、电磁阀、传感器、报警器和拖曳电缆都在电控箱内连接。
2.7.1 电机驱动电机为三相鼠笼式电机。
需要直接接线供电。
电机驱动机构冷却系统功率kW]截割电机水冷270泵电机水冷132铲板电机水冷 2 x 36运输机电机水冷 362.7.2控制系统控制系统包括两部分:•信号接收/监测装置;•无线遥控器。
手持遥控器发出的无线编码信号经掘锚机上的微机处理,转变成合适的电磁信号,随后控制掘锚机的各个功能。
控制系统监控安装在掘锚机各处的故障和位置传感器。
操作人员通过液晶显示屏可以知道机器所处的状态和位置。
信号接收/监测装置安装在掘锚机上,具有以下功能:•接收器和监视器带有进/出接口•信号接收/监测装置监视电磁线圈和继电器,以保证正确地工作•液晶显示屏向操作人员提示截割臂当前的位置、操作警告或机器所监测出的故障•信号接收/监测装置解析遥控器发出的无线编码信号,并将其转变成掘锚机上接触器的控制信号2.8 液压系统掘锚机液压系统包括:液压油箱、柱塞泵组、控制系统、管路和附件。
液压系统工作采用开路。
液压系统设计采用标准的液压部件。
液压泵站用一台电机进行驱动。
1 液压油箱2 组合泵3 电机4 联轴节5 热能交换器6 电磁阀7 油位指示器8 空气过滤器9 空气过滤器指示10 压力过滤器11 压力过滤器指示12378654 109 112.9 冷却与喷雾系统2.9.1 降尘•机载有除尘通道和除尘风机•机器装有水喷雾系统,进行降尘及稀释瓦斯2.9.2 水喷雾系统水喷雾系统采用特定的ITP喷嘴(降温抑制火花)。
这种喷嘴给有瓦斯的区域提供水气。
这种辅助气流是由特殊的ITP喷嘴产生的。
该系统有几个喷雾条组成。
通常切割滚筒后装两个喷雾条,铲板上装两个喷雾条。
2.10 锚杆系统山特维克矿山工程机械有限公司掘锚机的锚杆系统包括四台顶板锚杆机和两台侧邦锚杆机。
顶锚杆机可前后左右倾斜操作。
这样的结构布置使得截割、打顶锚杆和打侧邦锚杆能同时进行,加快掘进速度。
顶锚杆机被铰接在底座上,使锚杆机能在更大的范围内打顶板锚杆。
传统的连续采煤机靠行走履带的推力进行掏槽。
当遇到硬煤时,掏槽很困难。
然而,MB 670掘锚机是利用自身液压支撑架稳定住机身,靠液压缸的推力进行掏槽。
液压支撑架同时保证操作人员更安全。
锚杆系统包括:1 顶锚杆机 (4x)2 帮锚杆机 (2x) 3稳定系统,带两个顶梁油缸 4 支撑顶梁 5 底座 (2x) 6 工作平台 (2x) 7 顶锚杆机的控制台 (4x)8帮锚杆机的控制台(2x)• 顶锚杆机可前后左右进行摆动• 帮锚杆机位于工作平台上• 帮锚杆机可上下倾斜,打不同的高度• 帮锚杆机上下升降范围在400毫米,这样,锚杆布局就有了极大的灵活性4135572861。