绝对式光电编码器的接口装置设计与应用
光电编码器原理及应用电路
光电编码器原理及应用电路————————————————————————————————作者:————————————————————————————————日期:光电编码器原理及应用电路1.光电编码器原理光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。
这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。
光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。
由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,其原理示意图如图1所示;通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。
此外,为判断旋转方向,码盘还可提供相位相差90度的脉冲信号。
图1 光电编码器原理示意图根据检测原理,编码器可分为光学式、磁式、感应式和电容式。
根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。
1.1增量式编码器增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90度的脉冲信号,Z相为每转一个脉冲,用于基准点定位。
它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。
其缺点是无法输出轴转动的绝对位置信息。
1.2绝对式编码器绝对编码器是直接输出数字量的传感器,在它的圆形码盘上沿径向有若干同心码道,每条道上由透光和不透光的扇形区相间组成,相邻码道的扇区数目是双倍关系,码盘上的码道数就是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。
这种编码器的特点是不要计数器,在转轴的任意位置都可读出一个固定的与位置相对应的数字码。
显然,码道越多,分辨率就越高,对于一个具有N位二进制分辨率的编码器,其码盘必须有N条码道。
绝对式光电编码器基本构造及特点
绝对式光电编码器基本构造及特点绝对式光电编码器基本构造及特点绝对式光电编码器基本构造及特点用增量式光电编码器有可能于外界的干扰产生计数错误,并且在停电或故障停车后无法找到事故前执行部件的正确位置。
采用绝对式光电编码器可以避免上述缺点。
绝对式光电编码器的基本原理及组成部件与增量式光电编码器基本相同,也是光源、码盘、检测光栅、光电检测器件和转换电路组成。
与增量式光电编码器不同的是,绝对式光电编码器用不同的数码来分别指示每个不同的增量位置,它是一种直接输出数字量的传感器。
在它的圆形码盘上沿径向有若干同心码道,每条上透光和不透光的扇形区相间组成,相邻码道的扇区数目是双倍关系,码盘上的码道数就是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。
这种编码器的特点是不要计数器,在转轴的任意位置都可读出一个固定的与位置相对应的数字码。
显然,码道越多,分辨率就越高,对于一个具有N 位二进制分辨率的编码器,其码盘必须有N 条码道。
绝对式光电编码器原理如图1-8 所示。
绝对式光电编码器是利用自然二进制、循环二进制、二-十进制等方式进行光电转换的。
绝对式光电编码器与增量式光电编码器不同之处在于圆盘上透光、不透光的线条图形,绝对光电编码器可有若干编码,根据读出码盘上的编码,检测绝对位置。
它的特点是:可以直接读出角度坐标的绝对值;没有累积误差;电源切除后位置信息不会丢失;编码器的精度取决于位数;最高运转速度比增量式光电编码器高。
绝对式光电编码器是利用自然二进制、循环二进制、二-十进制等方式进行光电转换的。
绝对式光电编码器与增量式光电编码器不同之处在于圆盘上透光、不透光的线条图形,绝对光电编码器可有若干编码,根据读出码盘上的编码,检测绝对位置。
它的特点是:可以直接读出角度坐标的绝对值;没有累积误差;电源切除后位置信息不会丢失;编码器的精度取决于位数;最高运转速度比增量式光电编码器高。
绝对值编码器的工作原理

绝对值编码器的工作原理绝对值编码器是一种用于测量旋转或线性运动的装置,它可以提供准确的位置和方向信息。
它在许多领域中被广泛应用,比如机械工程、自动化控制、仪器仪表等。
绝对值编码器的工作原理基于光电效应和编码原理。
它通常由一个光电传感器和一个光栅盘组成。
光栅盘是一个圆盘状的透明介质,上面刻有很多等距的透明条纹,每个条纹被称为一个栅格。
光电传感器是一个能够检测光栅盘上栅格的变化的装置。
当绝对值编码器与运动物体相连时,光栅盘会随着物体的运动而旋转或移动。
光电传感器通过发射光束并接收反射的光束来检测光栅盘上栅格的变化。
当光栅盘旋转时,光电传感器会感知到光束的变化,从而产生电信号。
为了准确测量位置和方向,光栅盘上的栅格被设计成具有独特的编码方式。
常见的编码方式有二进制编码和格雷码编码。
二进制编码使用0和1两个数字来表示栅格的变化,每个栅格的变化都对应着一个特定的二进制码。
格雷码编码则是一种特殊的二进制编码,相邻的码之间只有一位不同,可以减少误差的传递。
光电传感器将检测到的光栅盘上栅格的变化转换为电信号后,会将信号传输给解码器。
解码器会根据编码方式将电信号转换为对应的位置和方向信息。
这些信息可以以数字或模拟形式输出给用户或其他控制系统。
绝对值编码器的工作原理使其具有准确测量位置和方向的能力。
相比于增量式编码器,绝对值编码器不需要参考点来确定位置,即使在断电后也能保持位置信息。
这使得绝对值编码器非常适用于需要高精度和稳定性的应用。
绝对值编码器的应用非常广泛。
在机械工程领域,它可以用于测量机械臂、机床、汽车发动机等的位置和方向。
在自动化控制系统中,它可以用于位置控制、速度控制和角度控制。
在仪器仪表领域,它可以用于测量仪器的位置和方向,如显微镜、望远镜等。
总结起来,绝对值编码器是一种基于光电效应和编码原理的装置,用于测量旋转或线性运动的位置和方向。
它通过光栅盘和光电传感器的配合工作,将光栅盘上栅格的变化转换为电信号,并通过解码器将信号转换为位置和方向信息。
绝对式光电轴角编码器CAN总线接口

收 缓 冲 器 , 支 持 先 进 先 出 ( FIFO) 原 则 , 支 持 11 位 和 29 位 标 识
码, 通信位速率可达 1Mbps, 可以工作在 BasicCAN 模式和 Peli-
CAN 模式。
CAN 总 线 驱 动 器 选 择 Philips 的 TJA1050, 它 是 高 速 CAN
3 编 码 器 CAN 总 线 接 口 在 光 电 跟 踪 系统中的应用
3.1 编码器用于光电跟踪系统位置检测
邮局订阅号: 82-946 360 元 / 年 - 69 -
嵌入式网络技术应用
中 文 核 心 期 刊《 微 计 算 机 信 息 》( 嵌 入 式 与 S OC )2007 年 第 23 卷 第 1-2 期
您的论文得到两院院士关注 文章编号:1008- 0570(2007)01- 2- 0069- 02
嵌入式网络技术应用
绝对式光电轴角编码器 CAN 总线接口
CAN Bu s In te rfa ce fo r th e Ab s o lu te Op to e le ctro n ic En co d e r
通 过 CAN 总 线 接 口 实 现 在 带 有 多 传 感 器 、多 分 系 统 的 控 制 系 统 中 数 据 传 输 , 本 文 论 述 了 它 在 大 型 光 电 跟 踪 系 统 中 的 应 用 。
关键词:绝对式光电轴角编码器,CAN 总线,SJ A1000,光电跟踪系统
中 图 分 类 号 : T P 393
更适合复杂的实时控制场合, 它同时负责对编码器的数据处理
和对 CAN 总线节点的初始化。CAN 控制器选择 Philips 半导体
公 司 的 SJA1000, 实 现 总 线 与 主 控 机 ( 控 制 计 算 机 ) 之 间 数 据 通
高精度光电编码器的设计与应用研究

高精度光电编码器的设计与应用研究光电编码器作为一种测量位置和角度的重要设备,在现代工业中得到了广泛的应用。
其主要原理是通过光电效应将物理量转化为电信号,再通过信号处理得到准确的位置或角度信息。
本文将探索高精度光电编码器的设计与应用,并研究该技术在工业领域的发展潜力。
第一节: 光电编码器的原理与分类光电编码器的原理基于光电效应,即光线照射到光电传感器上,产生电子与空穴对后,通过电路的处理,转化为电信号。
根据测量方式和应用需求的不同,光电编码器可以分为增量型和绝对型两种。
增量型光电编码器通过光电转换和信号处理,测量出物体运动的相对位移。
它适用于需要实时监测运动状态的场景,但无法恢复出绝对位置信息。
绝对型光电编码器能够准确确定物体的绝对位置或角度,无需初始化过程,并具有良好的抗干扰性。
它适用于需要准确定位和高精度控制的工业领域。
第二节: 高精度光电编码器的设计要点高精度光电编码器的设计要点关键在于提高信号的稳定性和精度。
以下是一些设计要点的概述:1. 光源和光电传感器的选择合适的光源和光电传感器选择对信号的稳定性至关重要。
光源应具有稳定的光强度和狭窄的光束角度,而光电传感器应具有高灵敏度和低噪声,以确保高质量的信号输出。
2. 信号的处理和解码算法设计高精度的光电编码器需要优化信号处理和解码算法。
有效的滤波和噪声抑制算法可以减小外界干扰对测量结果的影响,并提高信号的准确性和稳定性。
3. 机械结构的优化光电编码器的机械结构对其测量性能有重要影响。
减小机械误差和抗震动设计可以提高编码器的精度和稳定性。
此外,合适的安装方式和机械连接方式也对测量结果的准确性有重要影响。
第三节: 高精度光电编码器在工业领域的应用高精度光电编码器在工业领域有着广泛的应用。
以下是几个典型的应用案例:1. 机器人控制在工业机器人控制中,光电编码器用于测量机器人关节的角度和位置,实现对机器人运动的精确控制。
高精度的光电编码器可以提高机器人的定位精度和工作效率。
光电编码器的工作原理和应用电路
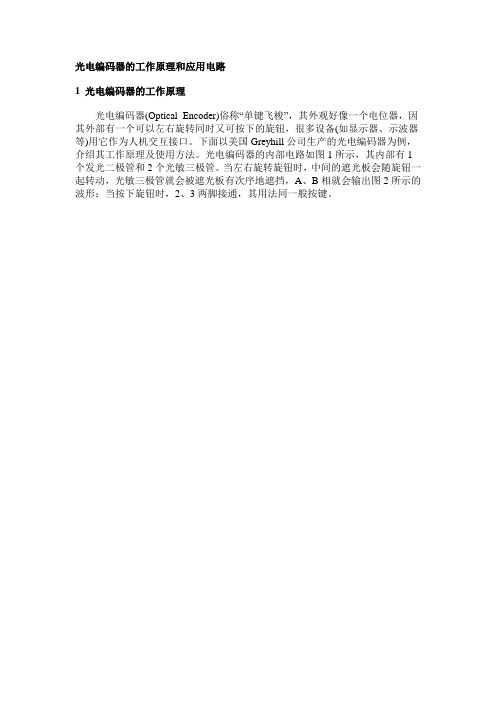
光电编码器的工作原理和应用电路1 光电编码器的工作原理光电编码器(Optical Encoder)俗称“单键飞梭”,其外观好像一个电位器,因其外部有一个可以左右旋转同时又可按下的旋钮,很多设备(如显示器、示波器等)用它作为人机交互接口。
下面以美国Greyhill公司生产的光电编码器为例,介绍其工作原理及使用方法。
光电编码器的内部电路如图1所示,其内部有1个发光二极管和2个光敏三极管。
当左右旋转旋钮时,中间的遮光板会随旋钮一起转动,光敏三极管就会被遮光板有次序地遮挡,A、B相就会输出图2所示的波形;当按下旋钮时,2、3两脚接通,其用法同一般按键。
当顺时针旋转时,光电编码器的A相相位会比B相超前半个周期;反之,A相会比B相滞后半个周期。
通过检测A、B两相的相位就可以判断旋钮是顺时针还是逆时针旋转,通过记录A或B相变化的次数,就可以得出旋钮旋转的次数,通过检测2、3脚是否接通就可以判断旋钮是否按下。
其具体的鉴相规则如下:1.A为上升沿,B=0时,旋钮右旋;2.B为上升沿,A=l时,旋钮右旋;3.A为下降沿,B=1时,旋钮右旋;4.B为下降沿,A=O时,旋钮右旋;5.B为上升沿,A=0时,旋钮左旋;6.A为上升沿,B=1时,旋钮左旋;7.B为下降沿,A=l时,旋钮左旋;8.A为下降沿,B=0时,旋钮左旋。
通过上述方法,可以很简单地判断旋钮的旋转方向。
在判断时添加适当的延时程序,以消除抖动干扰。
2 WinCE提供的驱动模型WinCE操作系统支持两种类型的驱动程序。
一种为本地驱动程序,是把设备驱动程序作为独立的任务实现的,直接在顶层任务中实现硬件操作,因此都有明确和专一的目的。
本地设备驱动程序适合于那些集成到Windows CE平台的设备,诸如键盘、触摸屏、音频等设备。
另一种是具有定制接口的流接口驱动程序。
它是一般类型的设备驱动程序。
流接口驱动程序的形式为用户一级的动态链接库(DLL)文件,用来实现一组固定的函数称为“流接口函数”,这些流接口函数使得应用程序可以通过文件系统访问这些驱动程序。
编码器的设计与应用研究

编码器的设计与应用研究编码器是一种将机械位置转换为串行数字信号的设备,常用于测量和控制旋转角度或线性运动距离。
在工业自动化、机械加工等领域被广泛使用。
编码器主要分为旋转编码器和线性编码器。
旋转编码器常用于测量物体旋转的角度。
线性编码器则用于测量物体线性运动的距离。
本文将重点介绍编码器的设计与应用研究。
一、编码器的设计原理编码器大致分为两类——光学编码器和磁性编码器,其中磁性编码器又可分为霍尔编码器和电感编码器。
这些编码器都有各自的特点和优势,选用时应根据实际需要来选择。
1.光学编码器光学编码器是利用光电二极管检测刻有光栅标记的旋转盘或平移标尺的运动来测量移动的位移,并将其转化为数字信号。
应用于数控机床、机器人、医疗器械、高速包装机等领域。
光电二极管是光电阻结的一种,其特点是在光照下会产生电流。
光电二极管将光学传感器的信号转换为电信号,通过后续的逻辑电路,识别出输入信号的大小和方向,输出对应的数字信号。
2.磁性编码器磁性编码器是利用霍尔传感器或电感传感器检测磁性材料上磁场变化的方式,将动态变化的磁信号转化为数字信号。
应用于飞机、自动化机械、船舶、石油、化工等行业中。
霍尔传感器是一种基于霍尔效应的传感器,将磁信号转化为电信号,通过后续的逻辑电路,识别出输入信号的大小和方向,输出对应的数字信号。
电感传感器是通过变换电磁感应作用的信号,将磁信号转换为电信号,通过后续的逻辑电路,识别出输入信号的大小和方向,输出对应的数字信号。
这种方式可实现极高的精度。
二、编码器的应用研究编码器的应用范围非常广泛,具有重要的研究价值和实用意义。
以下列举一些常见的应用领域。
1.机器人领域机器人领域是光电编码器的主要应用领域,主要用于机器人手臂的电机控制。
编码器通过回传实时的位置数据,确保机器人系统的高精准位置控制。
在实现机器人“眼观六路,手臂旋转”的综合控制中,编码器的测量能力尤其重要。
2.医疗器械医疗器械中的编码器广泛应用于X射线机、CT扫描仪、磁共振成像仪、治疗设备等。
绝对式光电编码器的结构和主要技术指标

绝对式光电编码器的结构和主要技术指标肯定式光电编码器的编码盘由透亮及不透亮区组成,这些透亮及不透亮区按肯定编码构成,编码盘上码道的条数就是数码的位数。
图1(a)所示为一个4位自然二进制编码器的编码盘,若涂黑部分为不透亮区,输出为“1”,则空白部分为透亮区,输出为“0”,它有4条码道,对应每一条码道有一个光电元件来接受透过编码盘的光线。
当编码盘与被测物转轴一起转动时,若采纳n位编码盘,则能辨别的角度为图1 肯定式光电编码器的结构示意图1-光源2-透镜3-编码盘4-狭缝5-光电元件自然二进制码虽然简洁,但存在着使用上的问题,这是由于图案转换点处位置不分明而引起的粗大误差。
例如,在由7转换到8的位置时间束要通过编码盘0111和1000的交界处(或称渡越区)。
由于编码盘的制造工艺和光电元件安装的误差,有可能使读数头的最内圈(高位)定位位置上的光电元件比其余的超前或落后一点,这将导致可能消失两种极端的读数值,即1111和0000,从而引起读数的粗大误差,这种误差是肯定不能允许的。
为了避开这种误差,可采纳格雷码(Gray code)图案的编码盘,表1给出了格雷码和自然二进制码的比较。
由此表可以看出,格雷码具有代码从任何值转换到相邻值时字节各位数中仅有一位发生状态变化的特点。
而自然二进制码则不同,代码常常有2-3位甚至4位数值同时变化的状况。
这样,采纳格雷码的方法即使发生前述的错移,由于它在进位时相邻界面图案的转换仅仅发生一个最小量化单位(最小辨别率)的转变,因而不会产生粗大误差。
这种编码方法称作单位距离性码,是有用中常采纳的方法。
表1 自然二进制码和格雷码的比较肯定式光电编码器对应每一条码道有一个光电元件,当码道处于不同角度时,经光电转换的输出就呈现出不同的数码。
它的优点是没有触点磨损,因而允许转速高,最外层缝隙宽度可做得更小,所以精度也很高,其缺点是结构简单,价格高,光源寿命短。
国内已有14位编码器的定型产品。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
绝对式光电编码器的接口装置设计与应用
蒋利勇, 李伟光 ( 华南理工大学机械工程学院, 广东 广州 510640)
摘要: 介绍了一种基于码器的数据采集、转换、显示及输出。
功能。
收稿日期: 2007-03-26 作者简介: 蒋利勇( 1978—) , 男, 湖南耒阳人, 华南理工大学机械工程学院硕士研究生, 研究方向: 制造系统的计算机控制; 李伟光( 1958—) 男, 江 西永丰, 华南理工大学机械工程学院, 教授, 研究方向: 制造自动化与机电一体化。
62
2.2 数据采集模块 由 于 编 码 器 R O Q 425 的 输 出 信 号 是 符 合 R S-485 协 议 的
《装备制造技术》2007 年第 5 期
系 统 人 机 交 互 界 面 采 用 通 用 液 晶 模 块 12232 系 列 的 12232F 图形点阵液晶显示器与 4 键独立式键盘。12232F 液晶 显 示 器 内 置 8192 个 16 ×16 点 汉 字 库 和 128 个 16 ×8 点 A SC II 字 符 集 , 主 要 由 行 驱 动 器 、列 驱 动 器 及 128×32 全 点 阵 液晶显示屏组成, 可显示图形及汉字, 实现系统参数与当前测 量值的显示。4 键独立式键盘用于实现系统的参数设定及功能 切换。 2.5 数字量输出
关键词: 绝对式光电编码器; 同步串行接口; 接口装置
中图分类号: TP 21
文献标识码: A
文章编号: 1672-545X (2007)05-0062-03
光电编码器又称轴编码器, 它以高精度计量圆光栅为检测 元件, 通过光电转换将输入轴的角位移信息转换为相应数字代 码。因其结构简单、计量精度高、寿命长等优点, 近年来在数控 机 床 的 精 密 定 位 方 面 使 用 较 多 。绝 对 式 编 码 器 因 在 分 辨 力 区 间 输出与其码盘机械位置相对应惟一的数字编码而得名, 其信号 输 出 形 式 有 并 行 和 串 行 输 出 两 种 , 其 中 串 行 输 出 以 SSI 接 口 ( 同步串行接口) 数据连线少、可靠度高的性能优势而得到较多 应 用 。 笔 者 以 A T89C 52 单 片 机 为 核 心 , 针 对 海 德 汉 公 司 的 R O Q 425(SSI)绝 对 式 光 电 编 码 器 进 行 接 口 装 置 的 设 计 , 以 实 现 对 传 感 器 数 据 的 采 集 、显 示 及 传 输 。
光敏元件 光栅付 光源
码盘 轴
图 1 绝对式编码器结构与原理图
D ata D n D n-1 D n-2 D n-3 D 1 D 2 M SB
Ta
S LS B
图 2 编码器读数时序图
2 系统硬件结构
系统的硬件结构框图如图 3 所示:
数据采集模块
数字量输出
按键电路
CPU
看门狗与 EEPRO M
液晶显示
主 控 程 序 主 要 对 系 统 进 行 初 始 化 、设 置 参 数 读 入 及 根 据 用 户需要调用相关功能模块。主控程序流程图如图 6 所示:
开始
系统初始化
数据采集
数据处理
Y 按键?
N 数据输出
按键处理程序
图 6 主控程序流程图 3 .2 数据采集
由编码器 R O Q 425 读数时序图可以看出, 编码器的绝对位 置值由时钟信号触发, 从最高位( M SB) 开始输出与时钟信号同 步的串行信号, SSI 标准的信号为 25 位( 12 位圈数 +13 位单圈 位置值) 串行。当不传送信号时, 时钟和数据位均为高电平, 在 时钟信号第一个下降沿, 当前值开始储存, 从时钟信号上升沿 开始传送数据信号。部分采集程序如下:
SJC J:SE TB P1.4 SE TB P1.5 C PL P1.4 NOP ; 第一个下降沿开始存储数据 NOP SE TB P1.4 NOP ; 第一个上升沿开始发送数据最高位 M O V C ,P1.5 C PL P1.4 M O V 2FH .0,C ; 将最高位存入 2FH 单元第 0 位 NOP
P 1.4
H IIL2
R3
R4
0.5K
0.5K
V cc 图 4 数据采集电路图
2.3 看门狗与 E E P R O M 系统在工业环境下运行时, 抗干扰能力是评价其性能的一
个重要指标。看门狗电路是自行监测系统运行的重要保证, 我 们采用 X icor 公司的 X 25045 芯片将 E E PR O M 、看门狗定时器、
学 出 版 社 ,991. [2] 杨金岩, 郑应强.8051 单片机数据传输接口扩展技术与应用实例
[M ].北京: 人民邮电出版社, 2005. [3] 窦振中.单片机外围器件实用手册[M ].北京:北京航空航天大学出
版 社,1998.
D esign and A pplication ofInterface D evice for A bsolute O pticalE ncoder
接 口 装 置 的 数 字 量 输 出 模 块 通 过 采 用 M A X 202 与 M A X 483 芯片实现 R S-232、R S-422 与 R S-485 输出, 以便实现 上位机及其他外部设备同 SSI 接口绝对式编码器的数据通信。
3 系统软件结构
接口装置在系统软件的控制下, 实现对 SSI 接口光电编码 器 的 数 据 采 集 、数 据 处 理 、显 示 及 输 出 等 操 作 。系 统 软 件 设 计 过 程中充分利用模块化设计思想, 以实现程序结构优化, 减少主 程序运行时间, 保证一定的采样频率。 3 .1 主控程序
63
Equipment Manufactring Technology NO.5, 2007
··· SE TB P1.4 N O P ; 第 25 个上升沿开始发送最数据低位 M O V C ,P1.5 C PL P1.4 M O V 2C H .0,C ; 将最低位存入 2C H 单元第 0 位 NOP SE TB P1.4 RET 3 .3 数据处理与按键处理模块 该模块将采集到的格雷码数据进行编码转换, 将转换后得 到的 B C D 码传送至 12232F 的显示缓存, 以显示当前编码器检 测到的绝对位置值, 并通过按键判断后将数据保存至 EEP- ROM 或通过数字量输出单元传送给上位机及其他外部设备。
V cc
D A TA +
D A TA - C LO C K + C LO C K -
14 V cc
13 N .C . A
12 11 B 10 Z 9Y 8 N .C .
N .C .
RO 1
RE 2 DE 3
4 D1 5
GND 6
GND 7
M A X 491
R1
R1
0.5K
0.5K
P 1.5 H IIL1
JIA N G Li-yong, LIW ei-guang (SchoolofM echanicalE ngineering,South C hina U niversity ofTechnology,G uangzhou 510640,C hina)
A bstract:In som e m easuring and controlling system s,m any outputinterfaces ofabsolute opticalencoder thatused in detecting is based on SSIinterface.The interface device based on A T89C 52 singlechip is introduced in the paper.Itcan realize data acquisition and transition,dis- play and output.The design ofhardw are and softw are are also given in the paper. K ey w ords:A bsolute opticalencoder; SSIinterface; Interface device
绝对式光电编码器又可分为单转型与多转型, 单转型绝对 编码器将码盘的一周分成若干个测量步, 对应每一步都有惟一 确定的码值, 由于这些码值在每一转都会重复, 因而单转型绝 对编码器多用于旋转轴旋转量不超过一转的角度测量; 多转型 绝对编码器不仅能够对一转内每一个确定的角位置进行编码, 还能够对转数进行编码, 因而适用于旋转轴的多转角度测量。 R O Q 425 绝对式光电编码器是多转型绝对式编码器, 共有 4096 ( 12 位) 圈, 每圈有 8192( 13 位) 个位置值, 其电器参数为, 工 作 电压: 10V ~30V ; 输出码: 格雷码; 信号 输 入 : TTL 时 钟 信 号 ; 信 号输出: 同步串行信号( SSI) 。其读数时序如图 2 所示。
3 WP
SCK 7
4 V ss
8 SI
X 25045
图 5 芯片 X 25045 与单片机硬件连接图 单片机的复位信号共有 3 个: 上电复位(C 1、R 2), 人工复位 (S、R 1、R 2)) 和看门狗复位(C 2、R 3)。X 25045 内看门狗电路的定 时时间可由具体应用程序的循环周期决定, 通常比系统正常工 作时最大循环周期的时间略长即可。编程时, 在软件的合适地 方加一条喂狗指令, 使看门狗的定时时间永远达不到预置时 间, 系统就不会复位而正常工作。当系统跑飞, 用软件陷阱等别 的方法无法捕捉回程序时, 则看门狗定时时间很快增长到预置 时间, 迫使系统复位。X 25045 内 512 字 节 的 串 行 E E PR O M 可 为用户的特殊应用提供便利, 如保存用户的设定值。 2.4 液晶显示与按键电路