MicroDistPro视觉对位系统算法
无源毫米波成像改进POCS超分辨率算法

取 有 效 后 处理 措 施 增 强 分 辨 率 。提 出 了一 种 改进 的 P C O S超 分 辨 率 算 法 , 算 法结 合 了 Wi e 滤 波 器 复 原 该 e r n 算 法和 凸 集投 影 ( OC ) 法 的优 点 , 用 W i e 滤 波 复 原 算 法 恢 复 图像 通 带 内的 低 频 分 量 , 用 P C P S算 使 e r n 运 O S算
A b t a t The sr c : pr e oblm of oo r s l in a q r d m a i t pa sv m ilm e e w a e m a ng p r e o uto of c uie i ge n he s ie li t r v i gi
( c o l f Elcr ncE g n e ig, n v r i f E eto i S in ea d S h o e to i n i ern U i e s y o lcr nc ce c n o t
T c n l g f C ia,C e g u 6 1 3 ,C ia eh o o yo h n hn d 1 7 1 hn )
g rt m m p o e h o v r e tr t n s c mp t t n l c r fii n h n P oi h i r v st ec n eg n aea d i o u a i a l mu h mo ee fce tt a OCS ag r h o y l o i m.Th t e ag rt m se sl mp e n e n r a i o a sv li t rwa e i g n . lo i h i a i i l me t d i e lt y me f rp s ie mi me e v ma i g l Ke r s p s i e mi i t r wa e i g n ; s p r r s l t n;POCS ag rt m ; i g e t r to y wo d : a sv l me e v ma i g l u e—eo ui o lo i h ma e r so a i n;
视觉对位贴合算法
视觉对位贴合算法一、概述视觉对位贴合算法是一种利用计算机视觉技术实现图像对齐的方法。
它主要应用于图像匹配、图像拼接、图像纠正等领域。
该算法通过对两幅或多幅图像进行特征点提取和匹配,最终实现图像的准确对齐。
二、基本原理1. 特征点提取特征点是指在一幅图像中比较明显的、不易变化的位置。
常见的特征点包括角点、边缘点和斑点等。
特征点提取是视觉对位贴合算法的第一步,其目的是从两幅或多幅图像中提取出相同或相似的特征点。
2. 特征点匹配特征点匹配是将两幅或多幅图像中的相同或相似特征点进行匹配,以确定它们之间的关系。
常见的特征点匹配算法包括暴力匹配算法和基于描述子的匹配算法。
3. 变换模型估计变换模型估计是通过已经匹配好的特征点,来确定两幅或多幅图像之间的变换关系。
常见的变换模型包括仿射变换、透视变换等。
4. 图像对齐图像对齐是将两幅或多幅图像进行准确的重合,使它们在相同的坐标系下,以便进行后续的处理。
常见的图像对齐算法包括基于特征点匹配的方法和基于全局优化的方法。
三、应用领域1. 图像匹配图像匹配是指在两幅或多幅图像中寻找相同或相似的目标。
视觉对位贴合算法可以通过特征点提取和匹配来实现图像匹配。
2. 图像拼接图像拼接是将多幅图像拼接成一幅完整的大型图像。
视觉对位贴合算法可以通过估计变换模型和进行全局优化来实现图像拼接。
3. 图像纠正图像纠正是指将倾斜、扭曲等形变后的图像恢复到原始状态。
视觉对位贴合算法可以通过估计仿射变换或透视变换来实现图像纠正。
四、发展趋势随着计算机硬件性能和计算机视觉技术的不断提升,视觉对位贴合算法也在不断发展。
未来的发展趋势包括:1. 深度学习技术的应用深度学习技术可以自动提取图像中的特征,并进行特征匹配和变换模型估计,从而实现更加精确的图像对齐。
2. 实时性的提高随着计算机硬件性能的不断提升,视觉对位贴合算法将可以在更短的时间内完成图像对齐任务。
3. 应用领域的拓展视觉对位贴合算法将会应用到更多领域,如三维重建、虚拟现实等。
机器视觉软件VisionPro使用入门技巧

机器视觉软件VisionPro使用入门技巧导语:机器视觉是人工智能正在快速发展的一个分支。
简单说来,机器视觉就是用机器代替人眼来做测量和判断。
机器视觉系统是通过机器视觉产品将被摄取目标转换成图像信号,传送给专用的图像处理系统,得到被摄目标的形态信息,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。
机器视觉是人工智能正在快速发展的一个分支。
简单说来,机器视觉就是用机器代替人眼来做测量和判断。
机器视觉系统是通过机器视觉产品将被摄取目标转换成图像信号,传送给专用的图像处理系统,得到被摄目标的形态信息,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。
那么,从上面关于机器视觉的表述来看,图像处理分析软件的作用就很重要了。
目前在工业领域,常用的机器视觉软件有Halcon、VisionPro、LabView、EVision、HexSight、SherLock等等。
这些软件各自有各自的特点,我们今天要给大家介绍的是由行业巨头企业康耐视公司推出的VisionPro软件。
软件简介康耐视公司(Cognex®)推出的VisionPro®系统组合了世界一流的机器视觉技术,具有快速而强大的应用系统开发能力。
VisionProQuickStart™利用拖放工具,以加速应用原型的开发。
这一成果在应用开发的整个周期内都可应用。
通过使用基于COM/ActiveX 的VisionPro机器视觉工具和VisualBasic®、VisualC++®等图形化编程环境,开发应用系统。
与MVS-8100™系列图像采集卡相配合,VisionPro使得制造商、系统集成商、工程师可以快速开发和配置出强大的机器视觉应用系统。
目前VisionPro最新版本已更新至9.2CR1版本,不过这些版本在使用时必须使用硬件加密狗才能正常使用。
解读无人机视觉计算技术
解读无人机视觉计算技术上周国外一个叫Percepto的无人机计算机视觉初创公司获得了百万美元的种子轮投资,投资方还非常有名,包括时代华纳的前CEORichardParsons,著名创投家、达拉斯小牛队老板MarkCuban,以及中国著名天使投资人等。
这家公司在3月份未获得投资前就已经在indiegogo上众筹,获得了Wired这种国外知名媒体的报道,赞美其为无人机赋予视觉自动跟踪拍摄,看到这样字眼记者马上想到了更早一些的Lily无人机,之前它的宣传片大伙的时候,有一幕镜头是它跟着滑雪的人追踪拍摄,所以说无人机视觉计算这个早就在国外有些苗头了,而且这些看似不经意不伟大的创新恰恰是中国创业者苦苦追求而缺失的东西。
但是真相往往来得很简单,单从无人机这个行当来说,外国棒子这么会创新,就是因为外国棒子天生比我们会玩,玩得时候稍不留神就出现惊天地泣鬼神的idea了,混迹科技行业多年的记者马上觉悟到,无人机计算视觉很有可能成为继无人机整机之后的下一波产业机会,就找到了国内的无人机视觉计算一枚创业者了解现在我们应该了解的信息。
怎么看无人机的视觉计算技术?简单地说,可以理解成用摄像头和传感器结合计算机模拟类似人眼和大脑的作用,来得到三维空间的距离,进而识别物体、判断物体的运动状态以及其它。
对于目前的无人机要做的来说,现在主要是距离感知,因为激光扫描仪的设备太贵太重,小型化、低成本的距离测量涉及到硬件传感器和软件算法的还好;另一类是目标检测的,包括检测、跟踪识别、导航和其它。
大部分都是基于这两类的整合扩展。
国内无人机计算视觉到什么阶段了?据我所知的,国内无人机计算视觉这块,能够演示出很酷炫的技术效果能传播的很快,但总的来说还在一个从实验室到市场转化的阶段,大家都在找结合点,除了用图像结合机器学习这个稳定性相对比较高,其它蛮多方法在实际运用的时候还是存在局限性,比如光照、遮挡。
视觉自动对位系统讲义
视觉自动对位系统讲义工程部:郑茂强2010/01讲义要点一.视觉自动对位系统构成二.视觉自动对位系统选型三.视觉自动对位系统应用视觉自动对位通过CCD将图像采集到图像对位处理系统,再通过图像对位处理软件,算出偏移位置和角度,再传送给外部运动制器,进行位置纠正.对位前对位后视觉自动对位流程:运动平台已经能正常运行,CCD安装并正常成像根本平台类型(XYQ,UVW…),设置平台参数,做模板,对位精度等自学习(Calibration),算出平台与CCD之间的关系.拍目标拍对像对位,自动算出偏移距离和角度(脉冲数)根据对位得出的偏移脉冲值控制平台运动相机与镜头FV -aligne r XPe/P 3-800UNT(显示器)(PLC)(FV-Aligner ENG)(对位主机)运动控制器(运动控制平台)滚动球/鼠标/键盘(触摸屏人机界面)光源,棱镜(FV-Aligner UNT 直接控制驱动器)对位主机:目前公司代理的对位系统有:松下:A210(手动对位)PV310(自动对位)(详细资料见:松下选型手册P26-P27)FAST:带轴卡-FV2300-ENG 不带轴卡-FV2300-UNT (旧型为FV1100)FV-AlignerII(对位软件)FV1100FV2300PV310A210松下对位系统:摄像机A摄像机B操作手柄PV310算出两台摄像机所拍摄的对位标记的补正量使用UVW方式/XYθ方式的平台,进行对位位置控制精度在1μm以上(需要高精度移动平台)松下对位软件:使用高精度平台,位置控制PLC进行全自动对位.适应在线生产或生产线自动化程度比较高的场合. [操作说明]松下对位软件:[松下对位介绍.ppt]FAST对位系统:FV-1100FV-2300FV-aligner系列是一款多功能,高精度的定位型图像处理装置。
进行定位时,在相机读取的图像信息的基础上,自动计算出定位所需的XYθ移动量,然后通过控制一个三轴平台(或者四轴平台)的移动,实现对工件进行XYθ校正,从而达到精确对位的目的。
康耐视标定原理范文

康耐视标定原理范文首先,卷积是康耐视标定的核心操作。
卷积操作通过将输入图像与一个可学习的滤波器进行卷积运算来提取图像的局部特征。
滤波器的参数称为权重,它们通过反向传播算法进行优化。
通过卷积操作,康耐视标定可以有效地提取图像的边缘、纹理和颜色等特征。
在康耐视标定中,卷积操作是通过滑动一个固定大小的窗口在输入图像上进行的。
窗口每次向右或向下移动一个固定的距离,这个距离称为步长。
每个窗口下的图像块与滤波器进行卷积运算,并生成一个特征图。
这个过程可以通过下面的公式来表示:输出特征图=滤波器*输入图像块其中,*表示卷积运算。
为了保持特征图的大小与输入图像相同,康耐视标定通常会使用填充操作。
填充操作在输入图像的边界周围添加额外的像素,使得每个像素都有足够的周围像素可供卷积操作使用。
其次,池化是康耐视标定的另一个重要操作。
池化操作通过对特征图的特征进行降维和抽象来减少计算量,并提高模型的平移不变性。
常见的池化操作包括平均池化和最大池化。
平均池化将每个窗口下的特征图块的平均值作为输出特征,而最大池化则选择每个窗口下的特征图块的最大值作为输出特征。
池化操作通常是在卷积操作之后进行的。
输出特征=池化函数(输入特征)其中,池化函数可以是平均池化或最大池化。
除了卷积和池化操作,康耐视标定还包括其他一些重要的组件,如激活函数、批归一化和全连接层等。
激活函数用于引入非线性因素,批归一化可以提高模型的训练稳定性和泛化能力,全连接层用于将特征图转换为最终的分类结果。
总之,康耐视标定的原理是通过卷积和池化等操作来提取图像的特征,并通过学习一组参数来对图像进行分类。
它充分利用了卷积神经网络的局部感知性和共享权重的特点,能够对图像进行高效而准确的分类。
康耐视标定在计算机视觉领域具有广泛的应用,如图像识别、目标检测和语义分割等。
VisionPRO关于边缘计分原则
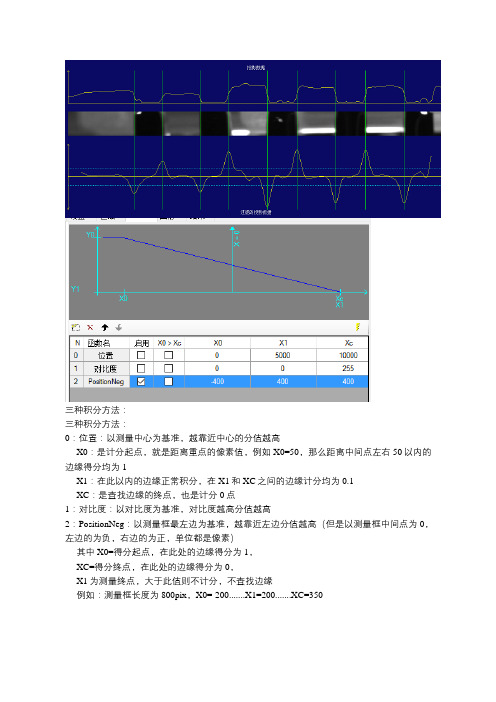
三种积分方法:
三种积分方法:
0:位置:以测量中心为基准,越靠近中心的分值越高
X0:是计分起点,就是距离重点的像素值,例如X0=50,那么距离中间点左右50以内的边缘得分均为1
X1:在此以内的边缘正常积分,在X1和XC之间的边缘计分均为0.1
XC:是查找边缘的终点,也是计分0点
1:对比度:以对比度为基准,对比度越高分值越高
2:PositionNeg:以测量框最左边为基准,越靠近左边分值越高(但是以测量框中间点为0,左边的为负,右边的为正,单位都是像素)
其中X0=得分起点,在此处的边缘得分为1,
XC=得分终点,在此处的边缘得分为0,
X1为测量终点,大于此值则不计分,不查找边缘
例如:测量框长度为800pix,X0=-200.......X1=200.......XC=350
那么:以测量框中点400的位置往左200(就是X0)开始计分,此处的边缘和此处左的边缘分值均为1,从此处到X1之间的边缘分值按照位置降低,但是当X1≠XC时,X1处的分值不为0,
但是X1以后,XC之前的边缘不计分并忽略边缘;。
深度解析:移动机器人的几种视觉算法
深度解析:移动机器人的几种视觉算法谈到移动机器人,大家第一印象可能是服务机器人,实际上无人驾驶汽车、可自主飞行的无人机等等都属于移动机器人范畴。
它们能和人一样能够在特定的环境下自由行走/飞行,都依赖于各自的定位导航、路径规划以及避障等功能,而视觉算法则是实现这些功能关键技术。
如果对移动机器人视觉算法进行拆解,你就会发现获取物体深度信息、定位导航以及壁障等都是基于不同的视觉算法,本文就带大家聊一聊几种不同但又必不可少的视觉算法组成。
本文作者陈子冲,系Segway Robot架构师和算法负责人。
移动机器人的视觉算法种类Q:实现定位导航、路径规划以及避障,那么这些过程中需要哪些算法的支持?谈起移动机器人,很多人想到的需求可能是这样的:“嘿,你能不能去那边帮我拿一杯热拿铁过来。
”这个听上去对普通人很简单的任务,在机器人的世界里,却充满了各种挑战。
为了完成这个任务,机器人首先需要载入周围环境的地图,精确定位自己在地图中的位置,然后根据地图进行路径规划控制自己完成移动。
而在移动的过程中,机器人还需要根据现场环境的三维深度信息,实时的躲避障碍物直至到达最终目标点。
在这一连串机器人的思考过程中,可以分解为如下几部分的视觉算法:1.深度信息提取2.视觉导航3.视觉避障后面我们会详细说这些算法,而这些算法的基础,是机器人脑袋上的视觉传感器。
视觉算法的基础:传感器Q:智能手机上的摄像头可以作为机器人的眼睛吗?所有视觉算法的基础说到底来自于机器人脑袋上的视觉传感器,就好比人的眼睛和夜间视力非常好的动物相比,表现出来的感知能力是完全不同的。
同样的,一个眼睛的动物对世界的感知能力也要差于两个眼睛的动物。
每个人手中的智能手机摄像头其实就可以作为机器人的眼睛,当下非常流行的Pokeman Go游戏就使用了计算机视觉技术来达成AR 的效果。
像上图画的那样,一个智能手机中摄像头模组,其内部包含如下几个重要的组件:镜头,IR filter,CMOS sensor。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
系统共两颗相机;左边相机从下往上拍整个手表盖板,搜索圆心为中心,圆上一点为角度;右边相机从上往下拍整个手表液晶模组,同样搜索圆心为中心,圆上一点为角度;计算目标与对象的偏差,执行对位
10. 单目双Mark映射对位应用
系统共两颗相机;左边相机从上往下拍翻转平台整个产品,搜索整个产品外轮廓定出产品中心XY和角度;右边相机从上往下拍对位平台整个产品,搜索整个产品外轮廓定出产品中心XY和角度;计算目标与对象的偏差,执行对位
4.三Mark自对位
系统共三颗相机; 三相机小视野抓取产品上三个Mark , 计算与设定标准位置的偏差,执行对位
5.四Mark自对位
系统共四颗相机;四 相机小视野抓取产品上四个Mark , 计算与设定标准位置的偏差,执行对位
6.四Mark转换对位
系统共四颗相机;左边2颗相机从上往下拍上料平台上产品2个角点, 定出产品中心XY和角度;右边2颗相机从上往下拍对位平台上产品2个角点,定出产品中心XY和角度;计算目标与对象的偏差, 执行对位
MicroDistPro应用领域
印刷机(丝网印刷、钢板印刷等)
钻孔机(PCB等)
切割机(晶片、陶瓷、玻璃等)
曝光机( LCD、PCB等 )
贴合机( TAB、ACF、FPC、LCD、COG等)
点胶机
机械手智能装配
1.单目双/三/四Mark自对位
系统共一颗相机;相机从上往下拍对位平台上整个产品,通过抓取双/三/四Mark; 计算与设定标准位置的偏差,执行对位
MicroDistPro对位系统构成
MicroDistPro视觉对位系统由视觉控制器 、图像采集系统、数字光源控制模块、MicroDistPro系统软件等构成。
支持多种机器人及运动平台
MicroDistPro支持各种主流运动平台 ,快速搭建你的对位系统。
Delta机械手4轴SCARA6轴SCARA
XYθ平台UVW平台
11. 单相机对位(相机移动拍照)
相机安装在一个X方向的轴上,产品在平台上不移动,相机移动拍照产品的两个Mark 点,由于只能做一次对位, 主要用于产品的上下料及预对位。
标准附件-视觉控制器
控制器型号
处理速度
尺寸
相机分辨率
相机数量
中
130万~500万
8
中
130万-500万
2-5
中
130万-1200万
Micro
MicroDistPro视觉对位系统是双翌光电科技专门针对高精度对位需求而自主研发的产品,MicroDistPro视觉对位系统助您快速构建机械手智能装配、机城手上下料、全贴合、偏光片贴合、丝网印刷、CO G 、F O G 、组装、玻璃切割等行业应用。系统操作简单易用、应用广泛、以及强大的兼容性, 是您理想的选择。
2.单目四/六/八Mark映射对位
系统共两颗相机;左边相机从上往下拍上料平台上整个产品,通过抓取二/三/四个Mark计算产品中心XY和角度;右边相机从上往下拍对位平台上整个产品, 通过抓取二/三/四个Mark计算产品中心XY和角度; 计算目标与对象的偏差, 执行对位
3.双Mark自对位
系统共两颗相机;两相机小视野抓取产品上两个Mark , 计算与设定标准位置的偏差,执行对位
2-3
订购信息
应用案例
7.六Mark转换对位
系统共六颗相机;左边3颗相机从上往下拍对位平台上产品3个角点,定出产品中心XY角度;右边3颗相机从上往下拍翻转平台上产品3个角点,定出产品中心XY和角度;计算目标与对象的偏差,执行对位
8.八Mark转换对位
系统共八颗相机;左边4颗相机从上往下拍上料平台上产品4个角点,定出产品中心XY和角度;右边4颗相机从上往下拍对位平台上产品4个角点,定出产品中心XY和角度;计算目标与对象的偏差,执行对位