欧姆龙视觉对位技术应用
2024 欧姆龙机器视觉与基恩士机器视觉
2024 欧姆龙机器视觉与基恩士机器视觉2024年的欧姆龙机器视觉和基恩士机器视觉在技术和应用方面呈现出许多不同点。
首先,欧姆龙机器视觉在图像处理和分析方面具有较强的能力。
其使用先进的算法和模型,能够高效地对图像进行分割、识别和测量。
这使得欧姆龙机器视觉在工业自动化和质量控制等领域中得到广泛应用。
与之相比,基恩士机器视觉则更注重于高精度的图像捕捉和处理。
它采用了先进的相机和光学系统,能够获得清晰、准确的图像。
其主要应用于医疗影像诊断和科学研究等领域,对图像的细节和精度要求较高。
其次,欧姆龙机器视觉在工业自动化中的应用更为广泛。
它可以用于产品检测、物体识别、轨道导航等多个环节,能够提高生产效率和准确性。
基恩士机器视觉相对而言更多应用于科学研究和医疗领域,例如进行细胞分析、病理学研究等。
最后,欧姆龙机器视觉和基恩士机器视觉在价格上也存在一定的差异。
由于欧姆龙机器视觉应用于工业领域较为广泛,其价格相对较低。
而基恩士机器视觉则通常更加昂贵,因为其在高精度图像捕捉和处理方面的先进技术和设备成本较高。
总体而言,2024年的欧姆龙机器视觉和基恩士机器视觉在技术能力、应用领域和价格方面存在一些差异。
这些差异使得它们分别适用于不同的行业和领域,满足了不同用户的需求。
此外,欧姆龙机器视觉和基恩士机器视觉在软件系统方面也有所不同。
欧姆龙机器视觉通过自主研发的图像处理软件,提供了强大的图像分析和算法开发功能。
这使得用户能够根据自己的需求定制图像处理流程,实现更精确的图像识别和测量。
同时,欧姆龙还提供了简单易用的用户界面和便捷的编程接口,方便用户进行系统配置和集成。
相比之下,基恩士机器视觉则着重于提供全面的图像采集和处理解决方案。
它配备了专门设计的图像处理软件,能够进行高速的图像捕捉和实时处理。
该软件还支持多种通信接口和协议,使得用户可以方便地与其他设备和系统进行数据交互和控制。
此外,欧姆龙机器视觉和基恩士机器视觉在技术支持和售后服务方面也有一定差异。
欧姆龙视觉传感器的技术特点

欧姆龙视觉传感器的产品特点以及技术特点一.产品特点在生产现场,通过采用视觉传感器检测零部件,可避免次品外流。
视觉传感器主要由捕捉检查对象物体(拍摄)用的摄像头以及处理图像的控制器组成。
通过摄像头捕捉图像信息,检测拍摄对象的数量、位置关系、形状等特点,用于判断产品是否合格或将检验数据传送给机器人等其它生产设备。
例如,在检查电视或手机用微小电子零部件的电极污迹方面,每分钟可检测数以千计的零部件。
还可用于检测手机操作部分的伤痕、污迹以及印刷效果等。
2006年1月欧姆龙独立开发的视觉传感器FZ3,凝聚了"逼真色彩合成技术",是世界首台可实现1,677万色的彩色图像处理产品。
与过去采用单色处理方式的图像处理相比,识别能力提高了约65,000倍。
可识别单色方式无法辨别的微妙色彩差异,从而能更高精度地检测缺陷及对象物体。
同时,应用"高动态范围图像处理技术",首次实现了检测装置商品化。
即使对于汽车发动机的结构件或者锂电池的外观等视觉传感器最棘手的光泽金属表面的零部件,它也能以鲜明的画面进行精确检测并判断优劣。
二.技术特点1、逼真色彩合成技术。
凭借逼真色彩合成技术,识别能力比单色方式提高了大约65,000倍。
生产现场视觉传感器的检测目标,是通过画面来检测零部件的外观尺寸及其质量,与使用普通数码摄像头相比,要求更精确、更高速的图像处理。
为此,在生产现场较为普遍的是采用信息量较少的单色方式处理图像。
即使是在彩色摄像头得到普及之后,仍然将捕捉到的彩色画面通过控制器转换成单色信号,再进行图像处理。
但这种方式只能用单色的256级灰度层次体现对象物体。
例如,在蓝色的检查对象物体上粘有深蓝色的污迹或伤痕时,虽然人眼能够分辨优劣,但由于单色图像处理的深浅度(对比度)等级层次少,导致无法区分产品的优劣。
领悟到这种单色图像处理局限及问题的欧姆龙,全新开发了能实现彩色图像处理的运算法则,这就是逼真色彩合成技术。
欧姆龙相对定位和绝对定位指令
欧姆龙相对定位和绝对定位指令【原创版】目录1.欧姆龙相对定位和绝对定位指令的概述2.相对定位指令的工作原理3.绝对定位指令的工作原理4.相对定位和绝对定位指令的优缺点5.欧姆龙相对定位和绝对定位指令的应用实例正文一、欧姆龙相对定位和绝对定位指令的概述欧姆龙作为一家全球知名的自动化技术企业,其生产的 PLC(可编程逻辑控制器)广泛应用于各种自动化控制系统中。
在欧姆龙的 PLC 控制系统中,相对定位和绝对定位指令是两种常见的控制指令,分别用于实现设备的相对位置控制和绝对位置控制。
二、相对定位指令的工作原理相对定位指令是一种基于相对坐标系的控制指令,其主要作用是根据设定的相对坐标值,控制执行器(如伺服电机、步进电机等)按照设定的速度和加速度运动到指定位置。
相对定位指令的特点是容易实现,且在运动过程中不受外界干扰,但需要额外的位置检测设备(如编码器)来检测执行器的实际位置。
三、绝对定位指令的工作原理绝对定位指令是一种基于绝对坐标系的控制指令,其主要作用是根据设定的绝对坐标值,控制执行器按照设定的速度和加速度运动到指定位置。
与相对定位指令不同,绝对定位指令不需要额外的位置检测设备,因为绝对定位指令直接使用 PLC 内部的位置数据。
但是,绝对定位指令在运动过程中可能会受到外界干扰,导致执行器无法精确地到达指定位置。
四、相对定位和绝对定位指令的优缺点相对定位指令的优点是实现简单、成本较低,缺点是需要额外的位置检测设备,且无法精确控制执行器的位置。
绝对定位指令的优点是不需要额外的位置检测设备,且可以精确控制执行器的位置,缺点是实现相对复杂,成本较高。
五、欧姆龙相对定位和绝对定位指令的应用实例在实际应用中,欧姆龙的相对定位和绝对定位指令可以广泛应用于各种自动化控制系统,如机器人控制、数控机床控制、输送线控制等。
第1页共1页。
欧姆龙对射光电l,d旋钮的作用

欧姆龙对射光电l,d旋钮的作用
光电l,d旋钮是欧姆龙公司生产的一种传感器,其主要功能是检测物体的存在与否。
通过发射红外光束并接收反射光束,该传感器可以准确地判断物体是否在其检测范围内。
在工业自动化领域,光电l,d 旋钮被广泛应用于物体检测、位置控制和物流系统等方面。
一、物体检测
光电l,d旋钮能够可靠地检测物体的存在与否。
当物体进入光电l,d 旋钮的检测范围内时,光束被物体遮挡,传感器会发出信号,告知系统物体已经被检测到。
这种物体检测功能在自动化生产线上非常重要,可以用于物体分拣、装配过程中的定位和检测等环节。
二、位置控制
光电l,d旋钮能够精确地检测物体的位置,通过与其他传感器和控制器的联动,可以实现物体在特定位置的控制。
例如,在自动化仓储系统中,光电l,d旋钮可以用于检测货物在传送带上的位置,从而控制其进一步的运输和分拣。
三、物流系统
光电l,d旋钮在物流系统中也扮演着重要的角色。
通过安装在货物运输设备上,光电l,d旋钮可以实时监测货物的位置和状态,确保货物的安全和准确运输。
此外,光电l,d旋钮还可以被应用于货物的计数、分拣和定位等环节,提高物流系统的效率和准确性。
总结:
欧姆龙的光电l,d旋钮在物体检测、位置控制和物流系统等领域都具有重要的作用。
其可靠的检测功能和精确的位置控制能力,为自动化生产线和物流系统的运行提供了重要支持。
通过光电l,d旋钮的应用,可以实现自动化、高效和准确的物体检测、位置控制和物流管理,提升生产效率和质量。
欧姆龙光电l,d旋钮的技术优势和广泛应用,使其成为工业自动化领域中不可或缺的重要组成部分。
欧姆龙相对定位和绝对定位指令
欧姆龙相对定位和绝对定位指令欧姆龙相对定位和绝对定位指令欧姆龙相对定位和绝对定位指令是工业自动化中常用的两种定位控制方式。
相对定位是相对于当前位置移动的定位方式,而绝对定位是按照绝对坐标移动的定位方式。
在工业自动化控制系统中,掌握这两种定位方式对于提高生产效率和精度非常重要。
本文将深入探讨欧姆龙相对定位和绝对定位指令的原理、应用和优缺点,帮助读者全面理解和掌握这两种定位方式。
1. 欧姆龙相对定位指令欧姆龙PLC控制系统中的相对定位指令通常采用“MOV”命令进行控制。
在PLC编程中,通过设定相对移动的距离和速度参数,可以实现相对定位的控制。
相对定位的优点是操作简单,适用于多次进行相同相对移动的应用场景。
但缺点是对于需要精确到达目标位置的应用场合,由于相对定位是基于当前位置移动的,可能存在积累误差导致定位不准确的情况。
2. 欧姆龙绝对定位指令欧姆龙PLC控制系统中的绝对定位指令通常采用“MOVABS”命令进行控制。
在PLC编程中,通过设定目标位置的绝对坐标,可以实现按照绝对坐标移动的定位控制。
绝对定位的优点是能够精确到达目标位置,适用于对定位精度要求较高的应用场景。
但缺点是操作相对复杂,不适用于需要频繁改变目标位置的应用场合。
3. 应用和优缺点比较在实际工业自动化应用中,相对定位和绝对定位各有其适用的场景。
相对定位适用于需要多次进行相同相对移动的应用场合,操作简单,但精度有限;绝对定位适用于对定位精度要求较高的应用场合,能够实现精确到达目标位置,但操作相对复杂。
合理选择相对定位和绝对定位方式,可以根据具体应用场景来决定,以达到最佳的控制效果。
4. 个人观点和总结对于欧姆龙相对定位和绝对定位指令,我认为在实际应用中需要根据具体情况来选择合适的定位方式。
相对定位适用于操作简单的场景,而绝对定位适用于对定位精度要求较高的场景。
在实际应用中,可以根据控制要求来灵活选择相对定位和绝对定位方式,以实现最佳的控制效果。
欧姆龙 ZFX系列 视觉传感器 说明书

㾚㾝Ӵ⎆ ⲥ㾚 ϔԧ ӴZFX㋏⫼ѻ Ⳃ 㓪 SCHE-C-738C㿔䇶 ℸ 䌁 ZFX ㋏ ѻ DŽЁ䆄䕑њ ZFX ㋏ ѻ Փ⫼Ϟ 䳔ⱘ 㛑ǃ 㛑ǃՓ⫼ ⊩ㄝ DŽՓ⫼ZFX ㋏ ѻ ˈ䇋 䙉 ҹϟџ乍DŽ• ZFX ㋏ ѻ 乏⬅ ⬉⇨ⶹ䆚ⱘϧϮҎ DŽ• Փ⫼ZFX ㋏ ѻ ˈ 乏Ҩ㒚䯙䇏 ˈ⹂ ℷ⹂Փ⫼DŽ • 䇋 ㅵˈҹ 䱣 䯙DŽ˘ ⱘ ˚⫼ ˄ к˅Ў⹂ ℷ⹂ Փ⫼ZFX ㋏ ѻ ˈ Ё Ң 㺙ǃ䖲 ㄝ ⾡䆒 ǃ㾘Ḑㄝ 䖯㸠њ䇈 DŽІ㸠䗮 Ҹ 㗗䇈 њ䗮䖛І㸠 Ϣ䅵ㅫ ҹ PLC ㄝ 䆒 䖯㸠䗮 ⱘ DŽѻ Ⳃ 㓪 SCHE-C-738C11234567用户手册订购、使用时须知(请务必阅读)基础知识基本操作测量条件的设定运用中使用的功能附加功能并行接口附录视觉传感器液晶监视器一体式传感器ZFX 系列至欧姆龙产品的用户订购、使用时须知订购本公司工控设备产品时,在估价单、合同书、规格书中没有特别规定的情况下,适用以下的保证内容、责任的限制、适宜用途的条件等。
请在确认并接受以下内容的基础上订购和使用。
1.保证内容(1)保证期限本产品的保证期限为购入后或运抵指定场所后1年内。
(2)保证范围上述保证期限内,因本公司责任而导致本产品发生故障时,本公司将无偿提供替代品或对故障产品进行修理。
但是,下列原因导致的故障,不属于保证对象范围。
a) 在产品目录或操作说明书等所记载以外的条件、环境下使用而造成的故障b) 由本产品以外的原因而造成的故障c) 由本公司以外的人员进行的改造或修理所导致的故障d) 由于本产品本来的使用范围而造成的故障e) 本公司交换当时的科学、技术水平所无法预见的故障f) 其他由于天灾等灾害造成的非本公司责任的故障此处所说的保证,仅针对本产品,由于本产品故障所导致的损害不属于保证对象范围。
2.责任的限制(1)对于本产品引起的特别损害、间接损害以及消极损害,本公司概不承担任何责任。
(2)本产品可以编程,由本公司以外的人员所进行的编程,以及因此而产生的结果,本公司概不承担任何责任。
欧姆龙视觉标定方法_解释说明以及概述

欧姆龙视觉标定方法解释说明以及概述1. 引言1.1 概述在工业自动化领域,视觉标定是一个关键的技术,它能够通过对相机内外参数进行校准,实现对图像数据的精确处理和分析。
欧姆龙作为一家全球领先的自动化解决方案提供商,提供了一种高效可靠的视觉标定方法。
本文将详细介绍欧姆龙视觉标定方法的原理、步骤以及应用场景。
1.2 文章结构本文主要分为五个部分来阐述欧姆龙视觉标定方法。
首先,在引言部分中,我们将概述本文的目的和结构。
接下来,在第二部分中,我们将详细解释什么是视觉标定以及欧姆龙视觉标定方法的原理和步骤。
第三部分将概述欧姆龙视觉标定方法的优点和应用领域。
然后,在第四部分中,我们将通过一个实例演示欧姆龙视觉标定方法的具体步骤,并对其效果进行评价和可能出现的问题进行分析。
最后,在第五部分中,我们会总结文章并展望未来发展方向。
1.3 目的本文旨在全面介绍欧姆龙视觉标定方法,帮助读者深入了解视觉标定的概念和原理,并且提供实例演示来展示欧姆龙视觉标定方法的步骤和效果评价。
通过阅读本文,读者将能够了解欧姆龙视觉标定方法在工业自动化中的重要性和应用价值,以及未来发展方向。
2. 欧姆龙视觉标定方法解释说明:2.1 视觉标定的概念视觉标定是指通过计算机视觉技术对相机进行校准和参数调整的过程。
相机标定的目的是确定相机在3D空间中的位置和姿态,以及相关参数(如焦距、畸变等),以便实现准确的图像测量和分析。
2.2 欧姆龙视觉标定方法的原理欧姆龙视觉标定方法基于棋盘格图案和相机成像原理。
棋盘格图案作为一种常见的校准工具,由黑白方格交替组成,并精确了解其尺寸。
在这个方法中,棋盘格被放置在拍摄场景中,并且相机将多个角度拍摄到这些棋盘格。
通过分析图像上方格之间的变形,可以计算出相机内外参数。
2.3 欧姆龙视觉标定方法的步骤欧姆龙视觉标定方法包含以下步骤:第一步:准备工作在进行标定之前,需要准备一张高质量、清晰度较高的棋盘格图案。
该图案大小应该适用于拍摄场景,并包含足够数量的方格。
OMRON视觉系统的位置修正应用
0 引言眼睛是人的重要器官,因为有眼睛我们可以感受光明,可以看见身边的所有美好事物;因为有眼睛我们可以控制我们的人场行为动作;因为有眼睛我们可以判断距离的远景;因为有眼睛我们的手可以作出拿食物等许许多多的复杂动作。
如果给自动化设备安上“眼睛”,这样我们的自动化设备也能够完成许多任务。
图像传感器,其利用光电器件,将感光材料的光信号转化为与光信号成比例关系的电信号。
通过特定的电路将电信号进行抽取转化成为可用于分析计算的数据。
从而自动化设备可以通过相机捕捉图像,实现对目标对象的外观、文字、位置、瑕疵等特征检测。
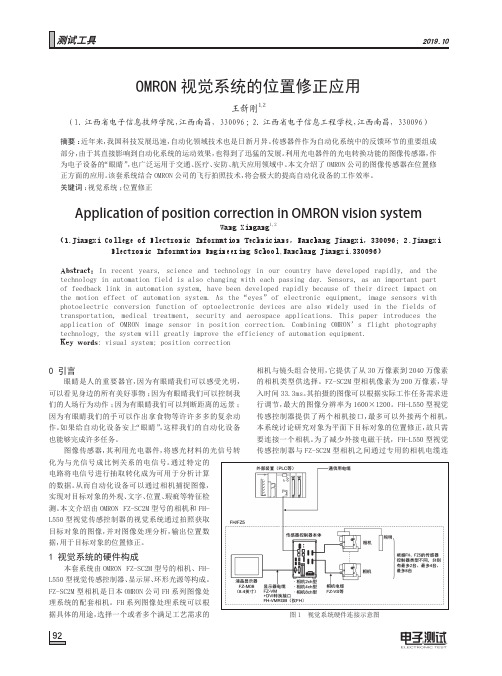
本文介绍由OMRON FZ-SC2M 型号的相机和FH-L550型视觉传感控制器的视觉系统通过拍照获取目标对象的图像,并对图像处理分析,输出位置数据,用于目标对象的位置修正。
1 视觉系统的硬件构成本套系统由OMRON FZ-SC2M 型号的相机、FH-L550型视觉传感控制器、显示屏、环形光源等构成。
FZ-SC2M 型相机是日本OMRON 公司FH 系列图像处理系统的配套相机。
FH 系列图像处理系统可以根据具体的用途,选择一个或者多个满足工艺需求的相机与镜头组合使用,它提供了从30万像素到2040万像素的相机类型供选择。
FZ-SC2M 型相机像素为200万像素,导入时间33.3ms。
其拍摄的图像可以根据实际工作任务需求进行调节,最大的图像分辨率为1600×1200。
FH-L550型视觉传感控制器提供了两个相机接口,最多可以外接两个相机,本系统讨论研究对象为平面下目标对象的位置修正,故只需要连接一个相机。
为了减少外接电磁干扰,FH-L550型视觉传感控制器与FZ-SC2M 型相机之间通过专用的相机电缆连photoelectric conversion function of optoelectronic devices are also widely used in the fields of transportation, medical treatment, security and aerospace applications. This paper introduces the application of OMRON image sensorinposition correction. Combining OMRON’s flight photography technology, the system will greatly improve the efficiency of automation equipment.Key words : visual system; position correction图1 视觉系统硬件连接示意图度无死角照射目标对象,排除阴影干扰,有效祛除表面的眩光,字符也可以清晰可见。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CONFIDENTIAL B
© OMRON Corporation
2
核心配置/关键技术
CONFIDENTIAL B
© OMRON Corporation
3
CONFIDENTIAL B
4
© OMRON Corporation
4
如何确保操作人员的安全
CONFIDENTIAL B
© OMRON Corporation
缸体型号识别和定位引导提案
制作人:大官人
Confidential B
© OMRON Corporation
0
工艺简介---×××流程图或简单的模型均可以
简单描述:识别缸体型号,缸体型号一共六种,识别后引导机器 人定位抓起缸体,计算X\Y\角度差,准确防止到流水线上。
Confidential B
© OMRON Corporation
5
如何确保操作人员的安全
CONFIDENTIAL B
© OMRON Corporation
6
如何确保操作人员的安全
检测说明: 不同种类的情况,种类表示会发生变化。
CONFIDENTIAL B
© OMRON Corporation
7
为客户提供的价值
关键课题 • 提高生产效率 原方案 员工识别缸体型号后手动上下料 80S/件 OC方案 通过视觉识别缸体型号,区别种类,引导机 器人抓起零件,实现自动上下料。 /件 实现自动化后,单班省人3人,两班6人,每 年预计降低人员成本40万。
1
2 1 1
2m I/O输入输出(可选)
1通道光源电源(可选) 开孔背光源(可选) 根据距离选择镜头
8
CONFIDENTIAL B
1
工艺/设备课题及解决方案(1)
课题及解决方案简述 课题1:缸体(2个工位)产品16种,工件长度、宽度不超 过400mm,生产过程中,机器手抓件到相机下拍照区分产 品种类。看局部300mm即可区分产品种类。 解决方案:1、根据预录入产品种类区分种类以及定位,2、 自动识别产品种类并按照预设发送给机器人或/PLC,3、 自动计算每种产品相对标准位置的X ,Y, Angel的偏移 (精度±1mm以内),4、自动传输位置数据给机器人引导 机器人准确抓取。 课题2:缸体(1个工位)产品共6种,工件长度、宽度不 超过400mm,产线宽度不超过500mm,工件到相机距离变化 不超过10mm,生产过程中,工件摆放会出现偏移,现需视 觉相机识别及定位,将工件坐标发送给机器人。 解决方案:1、根据预录入产品种类区分种类以及定位,2、 自动识别产品种类并按照预设发送给机器人或/PLC,3、 自动计算每种产品相对标准位置的X ,Y, Angel的偏移 (精度±1mm以内),4、自动传输位置数据给机器人引导 机器人准确抓取。
•
降低生产成本
原产线上料员工单班3人。
型号 FH-1050
品牌 欧姆龙 欧姆龙
数量 1 1
备注 2通道相机视觉控制器 200万黑白相机
如何确保操作人员的安全
FZ-VS3 10m
XW2Z-S013-2 JL-BRD2400X300W HF-12.5HA-1B
FZ-S2M
欧姆龙
欧姆龙 欧姆龙 欧姆龙
© OMRON Corporation