UVW自动对位平台即视觉对位平台
MMT XXY-对位平台
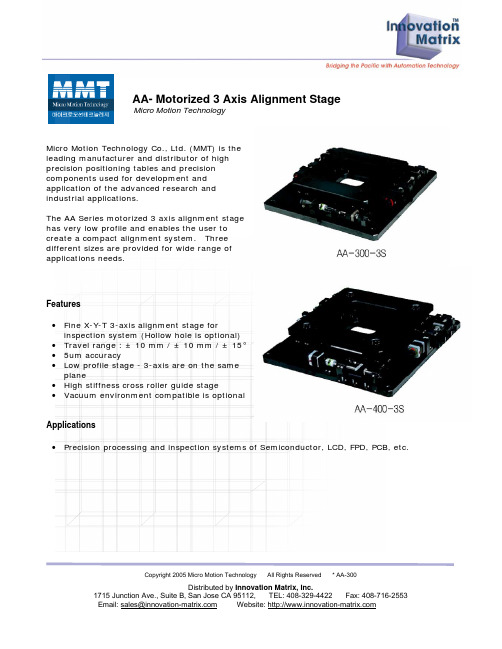
Copyright 2005 Micro Motion Technology All Rights Reserved * AA-300Distributed by Innovation Matrix, Inc.1715 Junction Ave., Suite B, San Jose CA 95112, TEL: 408-329-4422 Fax: 408-716-2553 Email: sales@ Website:AA- Motorized 3 Axis Alignment StageMicro Motion TechnologyMicro Motion Technology Co., Ltd. (MMT) is the leading manufacturer and distributor of highprecision positioning tables and precision components used for development andapplication of the advanced research and industrial applications.The AA Series motorized 3 axis alignment stagehas very low profile and enables the user tocreate a compact alignment system. Three different sizes are provided for wide range ofapplications needs.Features• Fine X-Y-T 3-axis alignment stage for inspection system (Hollow hole is optional)• Travel range : ± 10 mm / ± 10 mm / ± 15°• 5um accuracy• Low profile stage - 3-axis are on the same plane• High stiffness cross roller guide stage• Vacuum environment compatible is optionalApplications• Precision processing and inspection systems of Semiconductor, LCD, FPD, PCB, etc.Copyright 2005 Micro Motion Technology All Rights Reserved * AA-300Distributed by Innovation Matrix, Inc.1715 Junction Ave., Suite B, San Jose CA 95112, TEL: 408-329-4422 Fax: 408-716-2553Copyright 2005 Micro Motion Technology All Rights Reserved * AA-300Distributed by Innovation Matrix, Inc.1715 Junction Ave., Suite B, San Jose CA 95112TEL: 408-329-4422 Fax: 408-716-2553Copyright 2005 Micro Motion Technology All Rights Reserved * AA-300Distributed by Innovation Matrix, Inc.1715 Junction Ave., Suite B, San Jose CA 95112, TEL: 408-329-4422 Fax: 408-716-2553。
uvw平台对位原理
对位平台,顾名思义是对位用的。
任意两个工件需要组装到一起,都可以用到对位平台。
但是不是所有的工件组装都需要对位平台,因为不需要那么高的精度。
对位平台的精度可以去到1个微米,芯片的印刷就用到这个精度。
往低去了,像是手机屏幕的贴合,用到的精度也就3个微米以内。
常用的对位平台有三种,xyθ结构,5M结构,UVW结构。
它们的结构不一样,但是核心功能都是对位,通过X轴移动,Y轴移动,θ轴旋转,实现对位功能。
UVW对位平台是日本人发明的,它由上板,下板和四个单体组组成。
UVW对应的是三个动力轴,X轴方向两个马达(VW轴),Y轴方向一个马达(U),X轴两个马达同动实现X轴移动,Y轴一个马达控制Y轴移动,X轴两个不同步的时候实现θ轴转动。
这样,通过控制三个马达实现了X,Y的的移动,θ轴旋转实现对位。
PV200说明书
4.6 错误代码一览 ..................................................... 114
5 对位功能设定 ......................................115
2 基本操作 .................................................. 8
2.1 关于画面 ..................................................................9 2.1.1 运转画面和设定画面 ......................................9 2.1.2 预设菜单 ...................................................... 10 2.1.3 关于品种 No.0 以外、切换语言时预设 菜单的使用 ................................................... 12 2.1.4 选择菜单 ...................................................... 14
6.4 检查>对位>自学习 .......................................... 124 6.4.1 命令 ............................................................ 124 6.4.2 检查设定 ..................................................... 124 6.4.3 详细显示(自学习数据) ........................... 126 6.4.4 手动登录(自学习数据) ........................... 127 6.4.5 旋转中心补正(自学习数据) ................... 128
PLC対位制御Obata20070618-CN
详细指令 ●AAE指令(自动对位位置控制开始(带OFFSET))
&AAEP1P2P3P4<CR> &AAER1<CR>
PLS输出(V轴) PLS输出(W轴) PLS输出(U轴)
由PLC发出的执行自动对位的要求。
例)OFFSET为0时。
&AAE+00000000000+00000000000+0000000000000<CR> 执行自动对位的要求指令如上。 自动对位结束后、 &AAE00<CR> 为A210发出的执行正常的回答。
计算用存储器地址
●IPD→换算成当前值数据用的操作区
DT1310 DT1311 DT1312 DT1313 DT1314 DT1315 DT1316 DT1317 DT1318
DT1358 DT1359 DT1360 DT1361 DT1362 DT1363 DT1370 DT1371 DT1372 DT1373 DT1374 DT1375
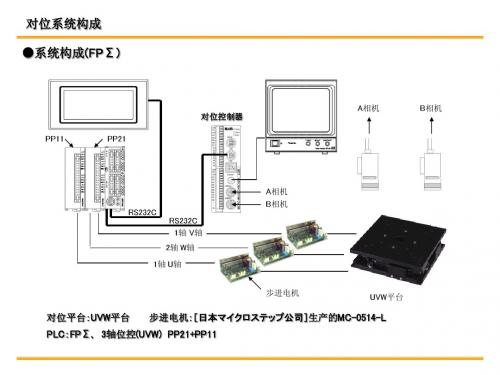
步进电机[日本マイクロステップ公司]生产的MC-0514-L
PLC:FPΣ、 3轴位控(UVW) PP21+PP11
对位系统构成 ●系统构成详解(FP2)
PP41 3轴 U轴 步进电机
1轴 V轴 步进电机
2轴 W轴 步进电机
PLC-UVW 平台 接线方法
●与PP*1(U轴) 的接线方法 PP*1 A1 B1 A2 B2 A3 B3 B4 A6 B6 A20 B20 24V 0V MC-0514-L CW+ CWCCW+ CCWRP13A-12RA-20PC(HRS)
W轴目的位置位置控制数据(mm)(二进制)(带符号)
计算用存储器地址
松下电工(中国)有限公司对位系统
滑座
轴承
UVW平台的组成[2]
※中央平台被一个倒 T型的支架固定。
UVW平台的组成[3]
据U轴的指令,向X方向移动。
据向V、W轴的同一指令,向Y方向移动。
据向U、V、W轴的同一指令,同时 向X、Y方向移动。
θ 方向 X方向
U、V、W轴的移动量相同,据改变移动方向 U、V、W轴各自移动量不同,据向不同 的指令,以平台中心为旋转中心向θ 方向移动。 方向移动的指令,以任意点为旋转中心 向θ 方向移动。
判定是否低于阀值 No 移动x、y、θ平台 对位结束
Yes
P.17
☆自动对位・・・实际动作
【 对位操作 】
※使对位mark与画面中央十字线的中心部相吻合。 ◆以上演示,对位动作需执行到达到下述二值化极限值。 ΔX →1μm以下、ΔY →1μm以下、Δθ →0.002°以下
◆摄像头 视野=约为2mm□,分辨率=约为0.004mm/像素
摄像头的设置向上向下都 没有关系。
摄像头的设置稍微倾斜也 没有关系。
方向不一様 比較小
垂直设置的摄像头左右 扭转也没有关系。
比較大
各摄像头视野的大小(据 高度方向的摄像头设置位 置和镜头倍率的差异)稍 有不同也没有关系。
視野不一様
P.14
自动对位系统概要
◆对位系统包的基本概念(2)
自学习(Caribration)
对位mark
十字mark
平台示例
P.18
关于mark对位
① 1个 mark 对位
缺角
基准边
摄像头视野
玻璃板
边缘对位有两个功用 有时候是针脚对位(针脚吻合) ◆将基板mark嵌入mark对位摄像头的视 野,进行初对位 ◆为做成玻璃板加工初期的对位mark而 进行的外形基准对位(缺角的两个边 的基准)
视觉自动对位系统讲义
视觉自动对位系统讲义工程部:郑茂强2010/01讲义要点一.视觉自动对位系统构成二.视觉自动对位系统选型三.视觉自动对位系统应用视觉自动对位通过CCD将图像采集到图像对位处理系统,再通过图像对位处理软件,算出偏移位置和角度,再传送给外部运动制器,进行位置纠正.对位前对位后视觉自动对位流程:运动平台已经能正常运行,CCD安装并正常成像根本平台类型(XYQ,UVW…),设置平台参数,做模板,对位精度等自学习(Calibration),算出平台与CCD之间的关系.拍目标拍对像对位,自动算出偏移距离和角度(脉冲数)根据对位得出的偏移脉冲值控制平台运动相机与镜头FV -aligne r XPe/P 3-800UNT(显示器)(PLC)(FV-Aligner ENG)(对位主机)运动控制器(运动控制平台)滚动球/鼠标/键盘(触摸屏人机界面)光源,棱镜(FV-Aligner UNT 直接控制驱动器)对位主机:目前公司代理的对位系统有:松下:A210(手动对位)PV310(自动对位)(详细资料见:松下选型手册P26-P27)FAST:带轴卡-FV2300-ENG 不带轴卡-FV2300-UNT (旧型为FV1100)FV-AlignerII(对位软件)FV1100FV2300PV310A210松下对位系统:摄像机A摄像机B操作手柄PV310算出两台摄像机所拍摄的对位标记的补正量使用UVW方式/XYθ方式的平台,进行对位位置控制精度在1μm以上(需要高精度移动平台)松下对位软件:使用高精度平台,位置控制PLC进行全自动对位.适应在线生产或生产线自动化程度比较高的场合. [操作说明]松下对位软件:[松下对位介绍.ppt]FAST对位系统:FV-1100FV-2300FV-aligner系列是一款多功能,高精度的定位型图像处理装置。
进行定位时,在相机读取的图像信息的基础上,自动计算出定位所需的XYθ移动量,然后通过控制一个三轴平台(或者四轴平台)的移动,实现对工件进行XYθ校正,从而达到精确对位的目的。
FPC曝光机设计技术手记(6) 曝光平台与对位精度

高亮度大视场照明系统
高解析度快速对焦CCD系统
高效可靠的 自动对位系统
Байду номын сангаас
高效率的对位算法与运算速度 高精度高灵敏高稳定性的对位调整平台 高度精准、可靠、可控、可视化的对位调节、检测、验证机构
高稳定的系统驱动电源
合理的对位基准选择(MASK对位之Mark设计规范)
FPC曝光机对位系统的视场与照明体系
对位靶标视场照明应优先选用黄色背 光源照明,以提高靶标识别对比度。
结构问题
边缘弱气流区域 边缘泄压区域
FPC曝光平台设计
作业问题 对策
物料的边缘平整度 物料在作业过程中的
平整性不良 曝光平台有效区裕度
对位靶标设置裕度
平台内部抽气气流不会直角流 动,因而存在周边死角区;
开放的物料边沿造成气压减 弱
物料边沿在吸附时存在荷叶边 区域
物料在作业过程中会出现翘曲 和褶皱
曝光平台周边有效区域裕度不 小于20mm
FPC 曝光机对位系统稳定性的扰动与规避
1、FPC 曝光机的对位系统主要有四个组成部分:曝光平台、光罩、光源和CCD对 位摄像头组成,
2、遵循“对位系统稳定性扰动最小化原则”,由于随着生产产品的变化,光罩 系统必须改变,因此应该以曝光平台为基准,实现相对曝光平台基准的、光罩平 行定位、光源光路和CCD摄像头光轴的准直性高度稳定;为此,曝光机的定位调 整应该以曝光光罩的对位调整方案为好。
图像识别 迭代运算
图像识别与靶标图像和数量相匹配 迭代算法与运算精度和运算速度相匹配
FPC曝光机对位系统对位靶标识别的看得清
视场
视场占空比 视场对比度
靶标在光标中的占空比过大容易造成误 判和难以对位
视觉自动对位系统的讲义.
02 13VBiblioteka P CUW
B
2.1 曝光機
紫外线灯
相 机
模板
平台
-流 程-
1.移动玻璃面板至平台
2.检出模板上的标志 3.自动定位 4.确认最终精度
5.用紫外线灯进行露光
6.排出玻璃面板
2.2 玻璃贴合机
玻璃面板Ⅱ
平台 相机
-流 程-
控制头
1.将玻璃面板Ⅱ上的标志移动到相 机视野内
2.检出并登录目标位置
二.视觉自动对位系统选型
对位用CCD相机 ① COG对位系统中因拍照视野范围约为3mm,所以用普通的30万像素
相机即可。 ② 相机拍照IC及玻璃进属于静止状态下拍照,通常用普通隔行扫描相
机即可。如: 松下:ANM832(包含相机电缆线)
Sentech:STC-E43A或STC-E42A (没有包含相机电缆线12W02)
二.视觉自动对位系统选型
目前常见对位平台:
XYθ平台 Xθ+Y平台
UVW平台
X
Y
1
2
Y 1
X 2
4軸平台
二.视觉自动对位系统选型
COG对位光学系统标准配置(参考表) 注:实际情况会有变化
名称
型号
1 远心镜头
MM6-ST65D
2 左侧视棱镜
MML-PSV16L
3 右侧视棱镜
MML-PSV16R
4 高亮度点光源
MLEK-A080W1LR MLEK-A080W2LR MLEK-A230W1LR MLEK-A230W2LR
MLEP-A035W1LR MLEP-A035W1LRD MLEP-A035W3LR MLEP-A035W3LRD
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
产品详情
“UVW自动对位平台视觉对位平台机器视觉台 GMT同款 XYY-150/XYY-200”参数说明
产品特性:
1. 侧面锁紧方式特殊设计,增强台面的锁紧稳定性
2. 铝合金材质精密加工,黑色阳极氧化表面处理
3.采用进口交叉滚柱导轨,精度高,承载较大,寿命长
4. 基座跟台面的精度,保证了平台的直线度,偏摆,平行度
5. 调整平移台采用测微头驱动
6. 微分头在平移台中心放置,操作方便;若放在侧向的话,结构更加紧凑
7. 采用弹簧复位,清除轴向间隙
8. 台面和底座分布标准孔距的安装孔,方便安装和组合
9. 可与其它系列位移台组合成多维的组合平台
产品图片:。