电动助力转向系统的控制系统设计
电动助力转向系统参数研究及优化设计
控制参数和转 向性能指标之间 的关系 曲线 . 以转 向路感 和转 向灵 敏度有效频域 能量均 值为优 化 目标 , 转 向稳定 性为约束条件 , 建立 了 E P S系统多 目标优 化设计模 型 , 并利 用 MA T L A B遗传算法 ( G e n e t i c A l g o r i t h m, G A ) 工具
稳定 性为约束 条件 , 以转 向路感 、 转 向灵 敏度 有效 频 域 能量 均 值 为 目标 函数 的 优 化 设 计 模 型 , 并 利 用 MA T L A B遗传算 法 ( G e n e t i c A l g o r i t h m, G A ) 工具 箱 对 E P S系统 的参数进 行 了优 化设 计 . 最后 , 对 优 化前 后 的结果进行 了对 比分析 , 验证 了优化设 计 的有效 性 .
基金项 目: 福建省 自然科学基金资助项 目( 2 O l i J O 1 2 9 8 ) 作 者 简 介 :王 伟 ( 1 9 7 0一) , 男, 教授 . E - ma i l : mk wa n g @f z u . e d u . c n
第 1期
王
伟, 等: 电动助力转 向系统参数研究及优化设计
Par a me t r i c s t ud y and o pt i ma l de s i g n o n
e l e c t r i c po we r s t e e r i ng s ys t e ms
1 N G We i .Y 0
( Co l l e g e o f Me c h a n i c a l En g i n e e r i n g a n d Au t o ma t i o n, F u z ho u Un i v e r s i t y, Fu z h o u 35 0 0 0 8, Ch i n a )
基于RH850P1x的电动助力转向系统设计
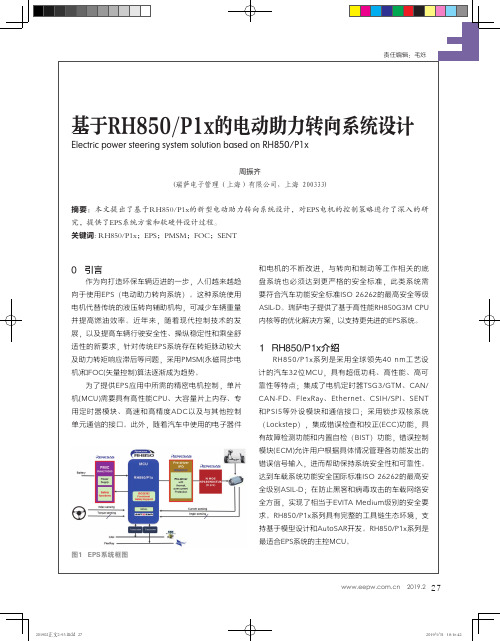
图1 EPS系统框图
2 系统设计
EPS系统如图1所示,包含以下。
A、电源管理部分:提供EPS系统所需要的各种电压,并能实现自我诊断和保护,提供对MCU的外部看门狗监控、SPI通信等;
B、传感器部分:采集电机的位置和电流等信号,电池电压等;
C、通信部分:包括CAN、SENT、SPI等,获取方向盘扭矩、车速等信息;
D、MCU控制部分:根据扭矩信号和车辆的状态,控制EPS助力策略;的PWM输出信号;
D、ENCA编码器:ENCA
信号,获得电机的位置;
E、TPBA定时器模式缓冲器
器的激励信号。
关于电机位置/转速信号的获取
多种方式:如果使用旋变编码器来检测电机位置以使用TPBA产生旋变编码器的激励信号
样返回的Sin和Cos信号,
信息;如果使用增量式编码器时
图2 EPS电机控制框图
图3 EPS软件控制框图
ELECTRONIC ENGINEERING & PRODUCT WORLD2019.2
严刚(1984-),男,嵌入式研发工程师,主要研究方向:智能家用电器基础技术研究及产品应用。
51
2019.2。
电动助力转向课程设计

电动助力转向课程设计一、教学目标本课程旨在让学生了解和掌握电动助力转向系统的基本原理、结构和应用,培养学生分析和解决实际问题的能力,提高学生的实践技能和科学素养。
具体目标如下:1.知识目标:学生能够描述电动助力转向系统的工作原理、主要组成部分和性能特点;了解电动助力转向系统在现代汽车中的重要作用。
2.技能目标:学生能够运用所学知识分析电动助力转向系统的性能,进行简单的故障诊断和维修;能够设计并实施一个小型的电动助力转向系统实验。
3.情感态度价值观目标:培养学生对汽车行业的兴趣和热情,增强学生对科技创新的认识,培养学生的团队协作能力和责任感。
二、教学内容本课程的教学内容主要包括以下几个部分:1.电动助力转向系统的原理:介绍电动助力转向系统的工作原理,包括电动机、转向机、控制器等主要部件的作用和相互关系。
2.电动助力转向系统的结构:讲解电动助力转向系统的结构组成,包括电动机、转向机、控制器、电源、传感器等部件的布局和连接方式。
3.电动助力转向系统的性能:分析电动助力转向系统的性能特点,如助力效果、响应速度、能耗等,并与传统机械转向系统进行比较。
4.电动助力转向系统的应用:介绍电动助力转向系统在现代汽车中的应用情况,以及未来发展趋势。
5.故障诊断与维修:讲解电动助力转向系统的故障诊断方法,如症状分析、故障码读取、实际操作等;介绍常见的故障维修方法和安全注意事项。
三、教学方法为了提高教学效果,本课程将采用多种教学方法相结合的方式进行授课:1.讲授法:通过讲解电动助力转向系统的原理、结构和应用,使学生掌握基本知识。
2.讨论法:学生针对实际案例进行分析讨论,提高学生分析问题和解决问题的能力。
3.案例分析法:通过分析典型故障案例,使学生了解电动助力转向系统的故障诊断和维修方法。
4.实验法:安排实验室实践环节,让学生亲自动手进行实验,增强学生的实践技能。
四、教学资源为了支持本课程的教学,我们将准备以下教学资源:1.教材:选择权威、实用的教材,为学生提供系统、全面的学习资料。
电动助力转向系统回正控制策略研究

蓑銎
表 2 优化前 、 后前 轮 定 位 参 数变 化 值 与 设计 值 对 比 优化 后
著
() 。
号, 由此计 算 出输 出电压 , 制 电动机 的运 行 。 回正 控
前 轮定 位 参 数
变 化 范 围 变 化 量 变 化 范 围 变 化量
设 计 初 始值 - . — .9 03 1 7 0 - .1 0 1 07 — . 2 22 ~ . . 37 4 5 9 1 l.3 .一 1 9 4 16 . 4 09 . 2 11 . 5 12 . 5 — .3 1 8 01— . 1 -.—. 05 02 2 0 21~ .2 . 3 5 4 1.8 l. 03 - 1 8 2 11 . 3 02 . 7 17 . 2 00 . 9 01 —. 5 — ~. 105 25 38 . . - 95 1. . 21 ~
e t t na r t r o to tae h td n’ n e t e n n l s n o e eo e . h u h rh s b i e E S mo e si i , eu n c nr l rt g t a o t e d se r ga ge e s ri d v lp d T e a t o a u l t P d l ma o s y i s d h
i r v eu a i t f te i g w e l n k o d fu d t n frt e b n h ts. mp o er t r b l y o e rn h e , d ma e a g o o n ai o e c e t n i s a o h
【 btatI hsp pre r oe o l tclpw rs e n ytm i aaye, d acnrl lo tm i A s c] ti ae, t n m dl fe c ia o e t r g ss s nl d n ot gr s r n ru er ei e z a oa i h
【03】4-2-1电动助力转向系统的控制策略
电动汽车在不同车速下转向时,EPS的控制部件能够通过对助力电机 电流的控制,提供合适的转向助力,这样既减轻了驾驶员的操纵负
担,又能保持一定的路感,同时还可以兼顾车辆低速时的操纵轻便 性和高速时的操纵稳定性,也即是在转向轻便性和路感之间找到1个 合适的平衡点。EPS系统的控制策略和控制算法是EPS系统控制性能 的关键,根据汽车不同转向行驶的状态,助力转回正控制。在车辆原地转向和低速
行驶时,以助力控制为主;车辆中低速行驶时以助力和回正控制为 主;
在车辆高速行驶时,以阻尼控制为主,防止车辆转向过快导致侧滑 和翻车现象的发生。按不同的控制方式,中央处理单元ECU作为EPS 系统的核心部件,将所有的控制策略和算法以软件与数据的形式存 储在微处理器的存储器中。
某款纯电动汽车电动助力转向系统设计开发

汽车设计培训--某款纯电动汽车电动助力转向系统设计开发
15
汽车设计培训-
汽车设计培训--某款纯电动汽车电动助力转向系统设计开发
16
汽车设计培训-
为了改善驻车及低速行驶时人手操纵力重的问题,增加了驻车状态和低 速曲线的斜率,增大了电机助力;为了改善中高速转向时人手操纵力轻的问 题,减小了中高速曲线的斜率,减少电机助力,增大车辆高速行驶时人手操 纵力;为了增加转向响应的灵敏度,调整了曲线横坐标起始点,增强中心感; 为了增加转向线性感,对不同车速曲线的间隔进行调整,使全车速的驾驶力 均匀增加。优化后曲线如图1(b)所示。
汽车设计培训--某款纯电动汽车电动助力转向系统设计开发
19
汽车设计培训-
5总结 介绍了某款汽油车改制为纯电动车过程中,转向系统由液压助力改为电 动助力的设计开发方案。 1)技术方案研讨。在选择电动助力方案时,需要综合考虑功能实现、 成本优化、批量生产等因素,为实现成本最低、开发周期最短、可靠性强, 最终选择借用公司现有车型的助力模块,采用管柱式电动助力方案。 2)结构设计及安装方案。考虑到使整车布置的变化量最小,则在硬点 不变的原则下进行转向系统的结构设计。转向管柱增加助力模块,体积和重 量相应增加,需要变更安装方式。同时转向传动轴的直径增大,实现传递更 大扭矩。转向器由液压式变为机械式,为提高转向响应,增大齿轮齿条的传 动比。
原地转向阻力矩,根据半经验公式(2)得到
汽车设计培训--某款纯电动汽车电动助力转向系统设计开发
9
汽车设计培训-
式中:f 为轮胎和路面的滑动摩擦系数,取值0.7;G1 为满载前轴载荷, kg;P 为轮胎气压,MPa。
回正力矩为
式中:R 为轮胎静半径,mm;σ为主销内倾角,°;rs 为主销偏移距, mm;δ为轮胎内转角,°。
电动助力转向系统的PID控制及仿真研究
0 引 言
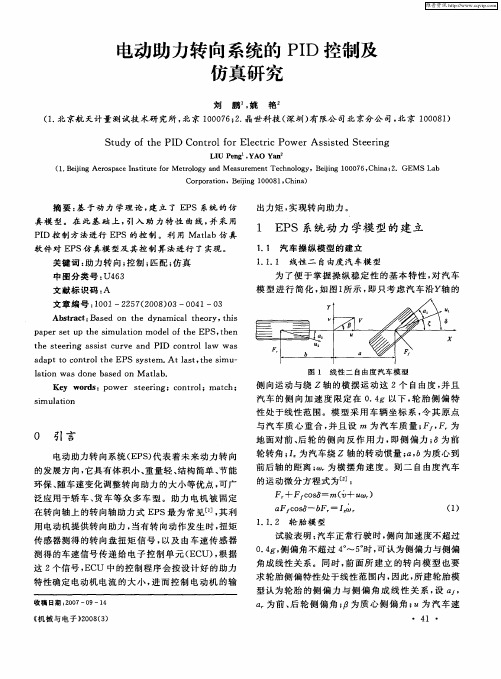
电动助力 转 向系统 ( P ) 表 着未 来动 力转 向 E S代
地 面对 前 、 轮 的侧 向反 作 用 力 , 后 即侧 偏力 ; 为 前 轮转角 ; I 为汽 车绕 Z轴 的转 动惯 量 ; , 为质 心 到 口b 前 后 轴 的距 离 ;, 横摆 角 速 度 。则二 自由度 汽 车 t为 o 的运 动微分 方程 式为 [ : 2 ]
Fr Ffo d r ( + uo) + cs= n v  ̄
的发展 方 向 , 它具有 体积 小 、 量轻 、 重 结构 简单 、 节能
环保、 随车速 变化调 整转 向助力 的大小等 优点 , 可广
泛 应 用于轿 车 、 车 等众 多 车型 。助力 电机 被 固定 货
在转 向轴上 的转 向轴助 力式 E S最为 常 见[ , 利 P 】其 ] 用 电动机提供 转 向助力 , 当有 转 向动作 发生 时 , 扭矩
出力矩 , 现转 向助力 。 实
1 E S系统动 力 学模 型 的 建 立 P
1 1 汽 车 操 纵 模 型 的 建 立 .
软件 对 E S仿 真模 型及其控 制 算法进 行 了实现 。 P
关键词 : 助力转 向; 控制 ; 配 ; 匹 仿真 中 图分 类号 : 6 U4 3
文献标 识码 : A 文 章 编 号 : 0 1—2 5 ( O 8 O 10 2 7 2 O ) 3—0 4 0 1一O 3
sm l a i n i 】 to 】
图 1 线 性 二 自 由 度 汽 车 模 型
侧 向运动 与绕 Z轴 的横摆 运 动这 2个 自由度 , 且 并 汽 车 的侧 向加 速 度 限定 在 0 4 以下 , 胎 侧 偏 特 .g 轮
性 处 于线 性范 围。模 型 采用 车 辆 坐标 系 , 其 原 点 令 与汽 车 质 心 重 合 , 且 设 m 为 汽 车质 量 ; , , 并 F, F 为
电动助力转向系统控制策略的研究
smp iid ln h y t m mo e r a p i d t n n ie r EPS mo e . Th smu ai n e u t h w h t h o to i lfe i e r s se d l a e p le o o ln a d1 e i lto r s ls s o t a te c n r l sr tg e r e sb e. ta e is a e f a il Ke wor y ds:EPS,Co r lsr t g nt o t a e y,Cu r nts t p i l ort r e e — o nta g ihm ,No i ar sm u a i nl ne i l ton
型的控制没计结果应用 于电动助力转 向系统的非线性仿 真模 型之 中 , 仿真结果证 叫了这样 的控制设计有 效 , 在这 种 简单的控制结构下 , 系统的控制性能也能达 到要求 。
关键 词 : 电动 助 力转 向 系统 , 制策 略 , 控 电流 给 定算法 , 线性 仿真 非 A td n t e Co to tae y o e ti o rS e rn y tm S u y o h n rlS rt g fElcrc P we t ei g S se
sg s o u r n l s d lo I c n r l ra d c re ts tp i ta g rt m . Th e in p r m ee s o an d b s d o in fc re tc o e -o p P o to l n u n e - o n lo h e i e d sg a a t r bti e a e n
Wu F n , n hj ,Y oD n w i W a gYu e g Ya gZ ia a o g e, i n n& HuS u e h g n
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2020/3/22
《电动助力转向系统的控制系统设计》 毛建伟 杨建中 蔡志标 陈仁史
目录
1、引言 2、电动助力转向系统数学模型的建立 3、EPS控制系统设计及仿真研究 4、台架试验及结果分析 5、结论
式中 Ie ——减速机构的转动惯量, Kg m2 ; Be ——减速机构的阻尼系数, N m /(rad / s) ; n1 ——蜗轮-蜗杆减速机构的减速比; Tw ——作用在输出轴上的反作用转矩, N m 。
2020/3/22
《电动助力转向系统的控制系统设计》 毛建伟 杨建中 蔡志标 陈仁史
式中
I m ——电动机和离合器的转动惯量,Kg m2 ; Bm ——电动机粘性阻尼系数, N m /(rad / s) ;
电动机等效电路图
m ——电动机的转角, rad ;
Tm ——电动机电磁转矩,这里即是电动机的控制输入, N m ;
Ta ——电动机负载,这里即为电动机输出助力转矩, N m 。
首先,需要建立研究对象的数学模型,本文建立了线性 三自由度汽车模型与EPS系统的集成数学模型 。
2. 1 线性三自由度汽车模型
在侧倾转向效应较大时,线性二自由度的汽车模型就不 够精确了,这时就必须计入侧倾自由度对角输入操纵运动 的影响。
列出三自由度车辆运动微分方程并整理得到:
I zr I xz p N rr N N N
《电动助力转向系统的控制系统设计》 毛建伟 杨建中 蔡志标 陈仁史
电动机模型
EPS 系统的电动机一般采用直流电动机: U LI RI kbm
电动机产生的电磁转矩为:
Tm Ka I
式中 Ka ——电动机的转矩系数: N m A1 。
电动机的机械特性模型为:
I mm Bm设计》 毛建伟 杨建中 蔡志标 陈仁史
1、引言
1.1 汽车转向系统发展历程
机械式转向系统
动力转向系统
液压助力 转向系统
电液助力 转向系统
电动助力 转向系统
线控 转向系统
2020/3/22
《电动助力转向系统的控制系统设计》 毛建伟 杨建中 蔡志标 陈仁史
电动助力转向系统的控制系统设计
Design of Control System for Electric Power Steering System
毛建伟 杨建中 蔡志标 陈仁史
Mao Jianwei, Yang Jianzhong, Cai Zhibiao, Chen Renshi
(上海海马汽车研发有限公司 上海龙东大道 6111号 201201)
1.2 电动助力转向系统的简介
EPS系统主要由机械 转向装置、转矩传感器、 车速传感器、助力电机、 减速机构、电子控制单 元(ECU)组成,如右 图所示。
电动助力转向系统 由于具有节能,安全, 环保,转向性能好而受 到业内人士的青睐。代 表了汽车转向技术的发 展方向,具有广阔的产 业化前景。
2020/3/22
转向轴助力式电动助力转向系统
毛建伟 杨建中 蔡志标 陈仁史
《电动助力转向系统的控制系统设计》 毛建伟 杨建中 蔡志标 陈仁史
1.3 研究的目的和意义
汽车转向系一直存在着“轻”与“灵”的矛盾,而且转 向力与路感也相互制约。EPS由电机提供助力,助力大小由 电控单元(ECU) 实时调节与控制,可以较好地解决上述矛盾。 EPS控制策略的设计是EPS系统的关键技术之一,如何得到 任意车速下的助力曲线是研究EPS技术的重点与难点。
在实际的控制系统中,电动机助力转矩Ta 可以表示为:
Ta 式中
K
mK(mm— —n1电1 )动机和减20速20机/3/2构2 的刚性系数,
N
m
/
rad
。
输出轴子模型
《电动助力转向系统的控制系统设计》 毛建伟 杨建中 蔡志标 陈仁史
对转向柱输出轴及电机输出轴进行动力学分析,得到下面的运动学方程: I e1 Be1 Tsen n1Ta Tw
MV(r ) M shp Yrr Y Y Y
I x p M shV(r ) I xzr Lp p L
2020/3/22
《电动助力转向系统的控制系统设计》 毛建伟 杨建中 蔡志标 陈仁史
图1 转向俯视图
图2 转向后视图
以前轮转角(转向盘转角)作输入时,整个汽车的运动状态可以用三个广义坐标来
转向盘和转向轴子模型
对转向盘和转向轴受力分析,这里考虑了转向盘的转动惯量,并且把转向轴的粘性阻尼
考虑在内,可以得到如下运动方程
式中
I hh B h h Th Tsen I h ——转向盘、转向轴的转动惯量, Kg m2 ;
Bh ——转向轴的粘性阻尼系数, N m /(rad / s) ;
h ——转向轴的旋转角, rad ;
表示(如图 1 和 2 所示):航向角 、质心侧偏角 和车身侧倾角 。
2020/3/22
《电动助力转向系统的控制系统设计》 毛建伟 杨建中 蔡志标 陈仁史
2. 2 EPS系统动力学模型
转向盘和转向柱输入轴子模型 电动机模型 输出轴子模型 齿条子模型
2020/3/22
EPS动态模型
《电动助力转向系统的控制系统设计》 毛建伟 杨建中 蔡志标 陈仁史
Th ——作用在转向盘上的转向转矩, N m ;
Tsen ——扭杆的反作用转矩, N m 。
由于转矩传感器是依靠扭杆的相对转动产生扭转变形,扭杆受到的转矩与扭杆的扭转角
度成正比,即有
式中
Tsen ks ( h 1 ) ks ——扭杆的刚性系数, N m / rad ;
1 ——输出轴的旋转角, rad 。 2020/3/22
国内电动助力转向研究领域,对EPS控制策略的研究主 要集中在常规助力控制,对以提高汽车高速行驶稳定性为目 标的阻尼控制研究较少,因此有必要开展该方面的研究,使 设计的EPS性能更适合汽车实际行驶需要。
2020/3/22
《电动助力转向系统的控制系统设计》 毛建伟 杨建中 蔡志标 陈仁史
2 电动助力转向系统数学模型