机器人的位姿运动学2017 (1)
第一章机器人运动学(1)解析

点的齐次坐标(补充)
一般来说,n维空间的齐次坐标表示是一个(n+1)维空间 实体。有一个特定的投影附加于n维空间,也可以把它看作 一个附加于每个矢量的特定坐标—比例系数。
v
ai
bj
ck
式中i, j, k为x, y, z 轴上的单位矢量,
列矩阵 x
a= x
, b= y
规定,一般情况:41列阵[a b c w]T 中 w 为 零,且满足 a2 + b2 + c2 = 1,则[a b c 0]T 中 的 a、 图1.2 坐标轴的方向表示 b、c 表示某轴的方向; w不为零,则[a b c w]T 表 示空间某点的位置。
图示的矢量 u 的方向用可表达为: u = [a b c 0]T
B A
R
A B
R
1
A B
R
T
坐标变换
2)平ቤተ መጻሕፍቲ ባይዱ坐标变换 坐标系{A}和{B}
具有相同的方位,但 原点不重合.则点P在 两个坐标系中的位置 矢量满足下式:
A P B P A PB0
Robotics 数学基础
坐标变换
3).复合变换 一般情况原点既
不重和,方位也不同. 这时有:
A
P
A B
RB
矩阵描述.
二、齐次坐标表示
将一个 n 维空间的点用 n+1 维坐标表示,则该 n+1 维坐标即为 n 维坐标的齐次坐标。记为:
P = [a b c w]T
w 称为该齐次坐标中的比例因子,当取w=1 时, 其表示方法称为齐次坐标的规格化形式,即:
P = [PX PY PZ 1]T
当 w 不为1时,则相当于将该列阵中各元素同时 乘以一个非零的比例因子w,仍表示同一点P,即: a = wPX;b = wPY;c = wPZ。
机器人的位姿描述与坐标变换

0
1
0
⎥ ⎥
⎢⎣− sinθ 0 cosθ ⎥⎦
Zi Zj
θ
θ Xi
Xj
Yi Y j
⎡cosθ − sinθ 0⎤
j i
R(Zi
,θ
)
=
⎢⎢sinθ
cosθ
0⎥⎥
⎢⎣ 0
0 1⎥⎦
Zi Zj
θ
Xi Xj
Yj
θ
Yi
⎡1 0
0⎤
j i
R(
X
i
,θ
)
=
⎢⎢0
cosθ
−
sinθ
⎥ ⎥
⎢⎣0 sinθ cosθ ⎥⎦
¥ ¥假设机器人的连杆和关节都是刚体¥ ¥
位置矢量
⎡x0 ⎤
P o '
o
=
⎢ ⎢
y0
⎥ ⎥
⎢⎣ z0 ⎥⎦
Z b Z'
O' Y' t n X' O
X Y
姿态矢量
O' O
R
=
[
O' O
X
OO'Y
⎡cos(∠X ' X )
O' O
Z
]3×3
=
⎢ ⎢
cos(∠X
'Y
)
⎢⎣cos(∠X ' Z )
单位主矢量
cos(∠Y ' X ) cos(∠Y 'Y ) cos(∠Z ' Z )
cos(∠Z ' X )⎤
cos(∠Z
'Y
)
⎥ ⎥
cos(∠Z ' Z ) ⎥⎦
姿态矩阵R的特点:
机器人运动学

机器人运动学(培训教材)(总49页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--第2章机器人位置运动学引言本章将研究机器人正逆运动学。
当已知所有的关节变量时,可用正运动学来确定机器人末端手的位姿。
如果要使机器人末端手放在特定的点上并且具有特定的姿态,可用逆运动学来计算出每一关节变量的值。
首先利用矩阵建立物体、位置、姿态以及运动的表示方法,然后研究直角坐标型、圆柱坐标型以及球坐标型等不同构型机器人的正逆运动学,最后利用Denavit-Hartenberg(D-H)表示法来推导机器人所有可能构型的正逆运动学方程。
实际上,机器手型的机器人没有末端执行器,多数情况下,机器人上附有一个抓持器。
根据实际应用,用户可为机器人附加不同的末端执行器。
显然,末端执行器的大小和长度决定了机器人的末端位置,即如果末端执行器的长短不同,那么机器人的末端位置也不同。
在这一章中,假设机器人的末端是一个平板面,如有必要可在其上附加末端执行器,以后便称该平板面为机器人的“手”或“端面”。
如有必要,还可以将末端执行器的长度加到机器人的末端来确定末端执行器的位姿。
机器人机构机器手型的机器人具有多个自由度(DOF),并有三维开环链式机构。
在具有单自由度的系统中,当变量设定为特定值时,机器人机构就完全确定了,所有其他变量也就随之而定。
如图所示的四杆机构,当曲柄转角设定为120°时,则连杆与摇杆的角度也就确定了。
然而在一个多自由度机构中,必须独立设定所有的输入变量才能知道其余的参数。
机器人就是这样的多自由度机构,必须知道每一关节变量才能知道机器人的手处在什么位置。
图 具有单自由度闭环的四杆机构如果机器人要在空间运动,那么机器人就需要具有三维的结构。
虽然也可能有二维多自由度的机器人,但它们并不常见。
机器人是开环机构,它与闭环机构不同(例如四杆机构),即使设定所有的关节变量,也不能确保机器人的手准确地处于给定的位置。
机器人运动学坐标变换

xi cos x j sin y j 0 z j yi sin x j cos y j 0 z j zi 0 x j 0 y j 1 z j
2017年2月19日星期日
工 业 机 器 人
第3章
3.2.1 直角坐标变换
工 业 机 器 人
第3章
3.1.1 机器人位姿的表示
姿态可h o p(x,y,z) h
o yh y
3.1 机器人的位姿描述
z
余弦值组成3×3的姿态
矩阵来描述。
cos(x , x h ) cos(x , yh ) cos(x , z h ) R cos(y , x h ) cos(y , yh ) cos(y , z h ) cos(z , x h ) cos(z , yh ) cos(z , z h )
2017年2月19日星期日
工 业 机 器 人
R
x , ij
第3章
3.2.1 直角坐标变换
2、旋转变换
②绕x轴旋转α角的 旋转变换矩阵为:
机器人运动学
zi
3.2 齐次变换及运算
zj
α
0 0 1 0 cos sin 0 sin cos
xj
yj oi oj
xi x j cos y j sin yi x j sin y j cos zi z j
xi
yi
xj
2017年2月19日星期日
工 业 机 器 人
第3章
3.2.1 直角坐标变换
2、旋转变换
机器人运动学
3.2 齐次变换及运算
① 绕z轴旋转θ角 若补齐所缺的有些项,再作适当变形,则有:
第3章 机器人位姿的数学描述与坐标变换

x=a(1-cos) , y=a(1-sinθ)
第3章 机器人位姿的数学描述与坐标变换
3.1 机器人位姿的数学描述
#假设机器人的连杆和关节都是刚体 (1)首先,建立一个参考坐标系; (2)然后,在刚体上任意建立一个刚体坐标系。
Z Z'
O' Y'
O
X'
X Y
第3章 机器人位姿的数学描述与坐标变换
刚体位置:
,
)
=
?
j i
R(,q
,
)
=
R(Z
,
)
R(Y
,q
)R(Z
,
)
绕动坐标轴依次转动时,每 个旋转矩阵要从左往右乘。
Z2
Zj
Zi (Z1)
q
q
Yj
(Y2 )
q Y1
Yi
Xi
X1 X2 X j
第3章 机器人位姿的数学描述与坐标变换
cos − sin 0 cosq 0 sinq cos − sin 0
R(Z
i
,q
)
=
s
inq
cosq
0
0
0 1
Zi Zj
q Xi
Xj
Yj q
Yi
第3章 机器人位姿的数学描述与坐标变换
1 0
0
j i
R(
X
i
,q
)
=
0
cosq
−
s in q
0 sinq cosq
cosq 0 sinq
j i
R(Yi
,q
)
=
0
1
0
− sinq 0 cosq
机器人的位姿运动学
PAB (Bx Ax )i ( By Ay ) j ( Bz Az )k
ax P b y cz
x
P
cz by ax
y
【空间向量的表示】
Application of a scale factor
Makes the matrix 4 by 1 Allows for introducing directional vectors
S 1 0 0 C 0
Representation of Combined Transformations
【复合变换的表示】
1. 2.
Example:
Rotation of degrees about the x-axis, Followed by a translation of [l1,l2,l3] (relative to the x-, y-, and z-axes respectively), Followed by a rotation of degrees about the y-axis.
nx n F y nz 0
ox oy oz 0
ax ay az 0
px py pz 1
【齐次变换矩阵】
3. 变换的表示 Representation of Transformations
当空间的坐标系(向量、物体或运动坐标系)相对于固定的参考坐 标系运动时,这一运动可以用类似于表示坐标系的方式来表示。
z
Axis
px pn p y l1 l2 po cos pa sin pz l3 l4 po sin pa cos
1机器人运动学
2) 棱柱联轴器(平动关节)的D-H坐标系
对于棱柱联轴器,距离di成为联轴器(关节)变量,而联轴器的方向即 为此联轴器移动的方向。该轴方向是规定的,但不同于转动关节的情况是 该轴空间位置没有规定。对于联轴器来说,其长度ai没有意义,令其为零。 联轴器的坐标系原点与下一个规定的连杆原点重合。棱柱联轴器的Z轴在 关节i+1的轴线上。Xi轴平行或反向平行于棱柱联轴器矢量与Zi矢量的交积。 当di= 0时,定义该联轴器的位置为零。
二、点在空间直角坐标系中绕过原点任意轴的一 般旋转变换 点A绕任意过原点的单位矢量k旋转角。kX、 kY、kZ分别为k矢量在固定参考系坐标轴X、Y、Z上 的三个分量,且
图1.7 一般旋转变换
可以证得,绕任意过原点的单位矢量k转角的旋转算子为
式中:
上式称为一般旋转齐次变换通式,它概括了绕X轴、Y轴及Z轴进行 旋转齐次变换的各种特殊情况。
手部的坐标系{B}的位姿来表示。 坐标系{B} 确定:取手部的中心点为原点
OB;关节轴为ZB轴,ZB轴的单位方向矢量a称为
接近矢量,指向朝外;两手指的连线为YB轴,YB 轴的单位方向矢量o称为姿态矢量,指向可任意
图1.4 手部的位姿表示
选定;XB轴与YB轴及ZB轴垂直,XB轴的单位方向
矢量n称为法向矢量,且n = o a,指向符合 右手法则。
图1.12 棱柱联轴器连杆D-H坐标系示意图
1.3.2
连杆坐标系间的变换矩阵
一、连杆坐标系间的齐次变换矩阵的表示方法 用 表示机器人连杆n坐标系的坐标变换成连杆n–1坐标系的
坐标的齐次坐标变换矩阵,通常写成An。对于n个关节的机器人,前 一个关节向后一个关节的坐标齐次变换矩阵分别为
A
也就是
《机器人》第2章-机器人位置运动学
和
3 P 5
单位向量
P
0.487 0.811
4
2
0.324
2
0
0
§2.3.3 坐标系在固定参考坐标系原点的表示
我们知道,每一个向量都可由它们所在参考坐标系中的 三个不相关的分量表示,通常用三个相互垂直的单位向量来 表示一个中心位于参考坐标系原点的坐标系,分别为n,o,a, 依 次 表 示 法 [线 (normal) , 指 向 (oritentati] on) , 和 接 近 (approach)。这样,坐标系就可以由三个向量以矩阵的形式 表示为
1 纯平移 2 绕一个轴的纯旋转 3 平移与旋转的结合 为了解它们的表示方法,我们将逐一进行探讨。
§2.5.1 纯平移变换的表示
如右图所示,如果一坐标系(它
也可能表示一个物体)在空间以不变 的姿态运动,那么该变换就是纯平移。 在这种情况下,它的方向单位向量保 持同一个方向不变。所有的改变只是 坐标系原点相对于参考坐标系的变换。
2.2 机器人机构
机械手型机器人特征: 1、具有多个自由度 2、三维开环链式机构
对单自由度系统:当变量设定 为特定值时,其机构就完全确定了, 所有其他变量也就随之确定。
如右图所示,当曲柄转角设定 为120°时,连杆与摇杆的角度也就 确定了。这是典型的单自由度闭环 结构。
多自由度系统:必须独立设定所有的(自由度个数)输 入变量才能知道其余的变量
变换矩阵应写成方型形式 。理由:
1、计算方型矩阵的逆要比计算长方形矩阵的逆容易的多
2、为使两矩阵相乘,它们的维数必须匹配,即第一矩阵
的列数要等于第二矩阵的行数。同时,由于机器人运动学计
算要以不同顺序将许多矩阵乘在一起来得到机器人运动方程,
机器人技术 数学基础-位姿描述与齐次变换
nx ox ax Px
Fobject
ny
nz 0
oy oz 0
ay az 0
Py
Pz 1
二、刚体位姿的数学描述
2. 约束变量
由刚体(坐标系)在参考坐标系的齐次矩阵表达可知, 该矩阵有12个变量,但描述刚体位姿只需要6个变量(自由 度)就足够了,因此,齐次矩阵中12个变量之间并不是相互 独立的,而是有约束的,约束条件为:
(O')
y
Pxyz Px ix Py jy Pz kz Puvw Pxyz u
x
三、刚体位姿的坐标变换
② 当动坐标系ΣO´uvw绕O点回转时,求P点在固定坐标系Σoxyz 中的位置
Puvw Pu iu Pv jv Pw kw
已知:
z w
P点在ΣO´uvw中是不变的仍然成
a= x , b= y , c= z ,w为比例系数 w ww
显然,齐次坐标表达并不是唯一的,随
x
V
y z
x
y
z
w值的不同而不同。在计算机图学中,w
wT 作为通用比例因子,它可取任意正值,但
w
在机器人的运动分析中,总是取w=1 。
一、点、向量和坐标系的齐次表示
因此,习惯上用W=1表示向量的长度,用W=0表示向量的 方向,而且方向向量一般表示成单位向量的形式。形式如下:
机器人位姿描述基本术语
4) 手腕(Wrist):位于执行器与手臂之间,具 有支撑和调整末端执行器姿态功能的机构。 操作臂的组成部分之一。
手Z 腕
X
5)手臂(Arm):位于基座和手腕之间,由操作
第2章 机器人位姿方程
说明:
(1)基系:基座坐标系0系是固定不动的。Z0轴取关节1的 轴线,O0的设置任意,也可与O1重合。 (2)末杆(工具)n:由于末杆只有一个关节,约定n坐标 系与n-1坐标系平行。
手腕坐标系:参照前述 (3)当关节i轴线和关节i+1轴线相交时:
坐标原点Oi取关节i轴线和关节i+1轴线交点,x轴的方 向为zn-1与zn构成的面的法线。 (4)当关节i轴线和关节i+1轴线平行时:
z4h
200
800
x4h
z0 x0
ci sici sisi aici
Ai
si
0
cici si
cisi
aisi
ci
di
0
0
0
1
400
c4 s4 0 0
A4
s4
0
c4
0
0
0
1 200
0
0
0
1
800
300 z1
x1
z2 x2
200
z3 x3
z4h x4h
z0 x0
2.机器人运动学方程
坐标原点可取为关节i+1轴线与关节i+2轴线的公垂线 与关节i+1轴线的交点。
2.2 连杆坐标系的变换矩阵
A矩阵:描述相邻两连杆齐次变换矩阵。A矩阵将上(小) 编号连杆坐标系向下(大)编号连杆坐标系变换。 A1描述第一个连杆对于机身的位姿,A2描述第二个连杆 坐标系相对于第一个连杆坐标系的位姿。 A1 A2描述第二个连杆坐标系相对于机身的位姿。 T矩阵:连续变换的若干A矩阵的积称为T矩阵。 对于一个六连杆(六自由度)机械手,末端执行器相对 于机身坐标系的齐次变换矩阵为
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Z Z’
z
a o
p
Fobject
n
y
L a n o O Y’ Y X’
连杆的位姿可用以下齐次矩阵表示:
T n o a
nx n P y nz 0
ox oy oz 0
ax ay az 0
px py pz 1
X
P(O’)
【刚体的表示】
Frame representation Requirements
pn p sin o cos pa 0
l1
py
pxyz Rot ( x, ) pnoa
0 1 Rot (x, ) 0 cos 0 sin
sin cos 0
【绕轴纯旋转变换的表示】
n o 0 n a 0 ao 0
(the dot-product of n and o vectors must be zero)
n 1
(the magnitude of the length of the vector must be 1) and
o 1
a 1
The same can be achieved by:
A transformation may be in one of the following forms: A pure translation A pure rotation about an axis A combination of translations and/or rotations
z
z
o
a n o x World Reference Frame y x Joint Reference Frame y
x Tool Reference Frame
y
【机器人的参考坐标系】
a
n
1. 机器人运动学的矩阵表示
Representation of a Point in Space
A point P in space can be represented by its three coordinates relative to a reference frame as:
the three unit vectors n, o, a are mutually perpendicular each unit vector’s length, represented by its directional cosines, must be equal to 1
These constraints translate into the following six constraint equations:
no a
上式包含了正确的右手法则关系,所以一般使用这个等式判断3个向量之间的关系。
2. 齐次(变换)矩阵
Homogeneous Transformation Matrices
4 by 4 matrices:
Can be pre- or post-multiplied Easy to find inverse of the matrix Represents both orientation and position information, including directional vectors
相对于固定的参考坐标系的每次变换,变换矩阵都是左乘的。
Transformations Relative to the Rotating
(current) Frame
当进行相对于运动坐标系或当前坐标系的轴的变换时: 为计算当前坐标系中点的坐标相当于参考坐标系的变化,这时 需要右乘变换矩阵而不是左乘。
Representation of a Pure Translation
1 0 T 0 0 0 1 0 0
z
a
d
0 dx 0 dy 1 dz 0 1
a o n n o
p
x
y
【纯平移变换的表示】
Representation of a Pure Translation
所谓逆变换就是将被变换的坐标系返回到原来的坐标系。
z
PAB (Bx Ax )i ( By Ay ) j ( Bz Az )k
ax P b y cz
P
----【矩阵】
cz by ax
x
y
【空间向量的表示】
Application of a scale factor
Makes the matrix 4 by 1 Allows for introducing directional vectors
nx n F y nz 0
ox oy oz 0
ax ay az 0
px py pz 1
【齐次变换矩阵】
3. 变换的表示 Representation of Transformations
当空间的坐标系(向量、物体或运动坐标系)相对于固定的参考坐 标系运动时,这一运动可以用类似于表示坐标系的方式来表示。
nx n F y nz 0
ox oy oz 0
ax ay az 0
px py pz 1
x
z
a
运动坐标系 Fn,o,a
o
p
n
y
全局参考坐标系
Fx, y , z
【坐标系在参考坐标系的表示】
Representation of a Rigid Body
nx n y nz 0 ox oy oz 0 ax ay az 0 px py pz 1
Fnew = Trans (dx ,dy ,dz )
1 0 0 0 0 1 0 0 0 d x nx n 0 dy y 1 d z nz 0 1 0 ox oy o z 0
F
ax ay az 0
old
Fnew
p x nx n py y p z nz 1 0
C Rot ( y, ) 0 S
C Rot ( z , ) S 0
S 1 0 0 C 0
S C 0 0 0 1
Representation of Combined Transformations
【相对于旋转坐标系(当前坐标系/运动坐标系)的变换】
4. 变换矩阵的逆
Inverse of Matrices
The following steps must be taken to calculate the inverse of a matrix:
Calculate the determinant of the matrix. Transpose the matrix. Replace each element of the transposed matrix by its own minor (adjoint matrix). Divide the converted matrix by the determinant.
o
z
n ao
方向余弦?
x
y
全局参考坐标系 Fx , y , z
nx F n y nz
a
n
ox oy oz
ax ay az
【坐标系在参考坐标系原点的表示】
Representation of a Frame Relative to a Fixed Reference Frame
【复合变换的表示】
1. 2.
Example:
Rotation of degrees about the x-axis, Followed by a translation of [l1,l2,l3] (relative to the x-, y-, and z-axes respectively), Followed by a rotation of degrees about the y-axis.
z
Axis
px pn p y l1 l2 po cos pa sin pz l3 l4 po sin pa cos
l3
pz
a
p
po pa po
pa
o
l4
y
l2
0 px 1 p 0 cos y pz 0 sin
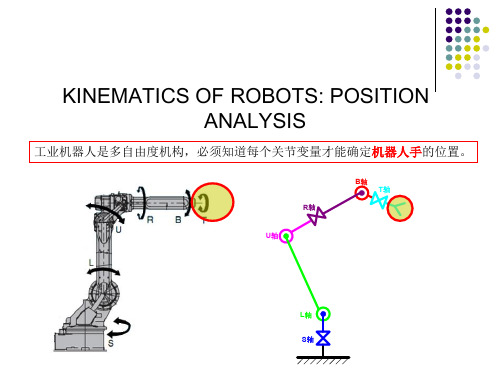
KINEMATICS OF ROBOTS: POSITION ANALYSIS
工业机器人是多自由度机构,必须知道每个关节变量才能确定机器人手的位置。
B轴 R轴 T轴
U轴
L轴 S轴
Robot Reference Frames
z
World Reference Frame Joint Reference Frame Tool Reference Frame
z
P axi by j czk
P
cz byxຫໍສະໝຸດ axy【空间点的表示】
Representation of a Vector in Space
A vector can be represented by three coordinates of its tail and its head. If the vector starts at point A and ends at point B, then it can be represented by: