360度全景泊车影像系统介绍ppt课件
360度全景泊车,普捷利绝密曝光
丰田
凯美瑞 锐志 霸道(普拉多)
雷克萨斯
ES240 ES350
日产
天籁
23
二、普捷利全景泊车影像系统之③产品优势
全景保真: 360度全景,大视野, 高保真 实时流畅: 30帧/秒输出,更流畅 自动调试:专业智能调试,3秒钟 完成 专车专用:完美匹配,前装享受
24
二、普捷利全景泊车影像系统之④普捷利发展与未来
16
二、普捷利全景泊车影像系统之①产品介绍
产品功能
旧版
个性设置
17
二、普捷利全景泊车影像系统之①产品介绍
主机性能参数:
项目
技术参数
性能指标
项目
技术参数
性能指标
系统
操作界面
图像化操作界面
主机尺寸
133mm×124mm×26mm
视频输入
4路NTSC/PAL格式视频输入 1路NTSC/PAL格式视频输出 -30℃~85℃ -40℃~105℃ 30%~85% 工业设计
7
6.四分屏全景泊车系统
6
4.可视倒车雷达系统 2,语音提示 “请注意,倒车”
7.有缝拼接全景泊车系统
5
5.倒车影像系统
4
3 1
1
1,后视镜
2
3.倒车雷达系统
4
②行车安全现存问题
路况一:停车入库,必须要高超技术才能完成么?
5
②行车安全现存问题
路况二:侧方位停车,车周障碍不直观、有盲点,没办法停了么?
2009年 2010年
THANKS!
怕驾驶盲区,用普捷利全景泊车
2009年:宝马
宝马5系GT 2010款 550i xDrive 宝马7系 价格:
【安至尊】解密汽车360度全景影像系统的前世和今生——第一讲:发展史
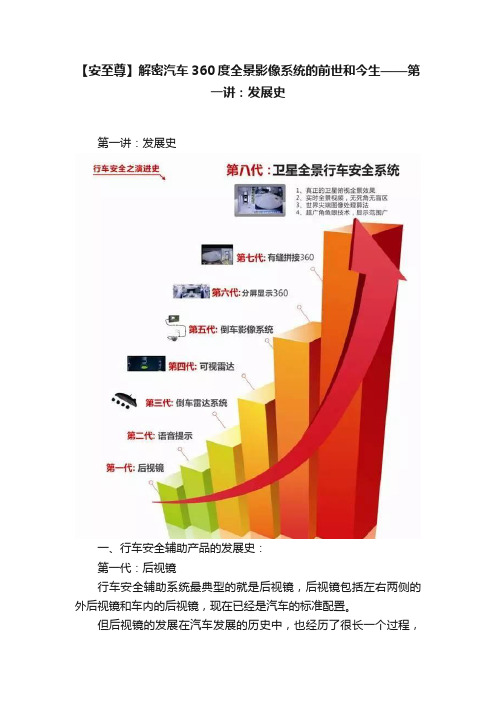
【安至尊】解密汽车360度全景影像系统的前世和今生——第一讲:发展史第一讲:发展史一、行车安全辅助产品的发展史:第一代:后视镜行车安全辅助系统最典型的就是后视镜,后视镜包括左右两侧的外后视镜和车内的后视镜,现在已经是汽车的标准配置。
但后视镜的发展在汽车发展的历史中,也经历了很长一个过程,才有了现在常见的状态。
我们大家都熟知的雷锋,当年就是吃了后视镜的亏,在那个一切往前看的年代,连开车最基本的后视镜都被摘除,雷锋的悲剧就是这样发生的。
后视镜的发展也提升了很多代,根据汽车档次不一,现在配置也有区别:从最原始的普通镜片后视镜,到普通防眩光镜片、电子防眩光镜片,主要用来防晚上后车远光灯造成的炫目;电加热镜片主要防雨雪雾天外后视镜积雾积水;电动后视镜便于灵活调整位置,倒车自动下滑后视镜,便于倒车时看到左右侧后方的盲区。
内后视镜还有加长、加大球面处理的,以便看到车内外更大的范围,尤其能帮助看到右后方B柱和C柱间外侧的盲区。
无论是行车还是倒车都要看后视镜,可以说没有后视镜,水平再高的司机都没法开车。
但同时后视镜也有非常大的盲区,安全行车还是有非常多的隐患。
第二代:单纯的语音提示第二代产品40岁以上人大多有印象,以前大型车辆倒车的时候,我们会听到连续的“倒车!请注意!”,这种电子蜂鸣器算是第二代产品,只能起到一定的警示效果。
第三代:倒车语音雷达第三代是倒车语音雷达,还分两种,一种是纯粹的蜂鸣器,随着距离越来越近,尖叫声越来越高;第二种还结合了显示和报读数据,例如“二米、一米、危险”等等。
现在10万以上的国际品牌车型基本都配了倒车雷达,5万以上的自主品牌车型也大部分配上了。
第四代:倒车可视雷达第四代是倒车可视雷达,随着高端车、原车显示屏越来越普及,可视雷达成为可能,典型的像宝马的73系列。
同时,大部分倒车可视雷达比单纯的倒车雷达多了一套前视雷达,装在车前保险杠上。
倒车雷达根据车辆离障碍物的远近分为绿色、黄色、红色雷达波,从而区分障碍物的远近,比单纯的倒车雷达感觉要好些,但不能区分障碍物大小,对低矮的障碍物判断有一定的误差。
360全景车影像系统 技术原理
360全景车影像系统是一种新型的车载影像系统,它可以通过多个摄像头将车辆周围的景象拍摄下来,并将这些影像拼接在一起,呈现给驾驶员。
这种系统可以提供更全面的视野,帮助驾驶员更好地掌握周围的交通情况,提高驾驶安全性。
1. 技术原理360全景车影像系统的核心技术是多摄像头拼接和变形校正技术。
2. 多摄像头拼接技术360全景车影像系统采用多个摄像头,分布在车辆的不同位置,例如前、后、左、右和顶部。
这些摄像头可以全方位地拍摄车辆周围的景象,包括车辆前方、后方、左右侧和顶部。
拍摄得到的影像需要经过图像融合和拼接处理,将各个摄像头拍摄到的影像拼接在一起。
这个过程需要考虑到不同摄像头的位置、视角和透视畸变,通过图像处理算法将这些影像拼接在一起,保证拼接后的影像平滑连贯,没有明显的拼接痕迹。
3. 变形校正技术由于摄像头的位置和角度的不同,拍摄得到的影像可能存在透视畸变和透视畸变,需要进行变形校正。
变形校正技术可以对拍摄得到的影像进行透视变形和畸变矫正,保证汽车周围景象的真实性和准确性。
4. 视觉效果处理360全景车影像系统的另一个关键技术是视觉效果处理,包括色彩校正和图像增强等技术。
通过对拍摄得到的影像进行色彩校正和图像增强,可以提高影像的清晰度和真实性,使驾驶员能够更清晰地看到车辆周围的景象,提高驾驶安全性。
5. 使用场景360全景车影像系统可以广泛应用于各种汽车类型,包括轿车、SUV、卡车和客车等。
这种系统可以为驾驶员提供更全面、更清晰的视野,帮助他们更好地掌握车辆周围的交通情况,减少盲区,提高驾驶安全性。
在城市道路、高速公路和郊外道路等不同路况下都能发挥重要作用。
6. 总结360全景车影像系统借助多摄像头拼接和变形校正技术,可以为驾驶员提供更全面、更清晰的视野,帮助他们更好地掌握车辆周围的交通情况,提高驾驶安全性。
这种系统的出现对提升汽车安全性有着积极的作用,有望在未来得到更广泛的应用。
7. 智能辅助驾驶随着汽车科技的不断进步,智能辅助驾驶成为了汽车行业的热点之一。
360全景产品介绍及概要性定义
项目 电源 GND 启动ACC 前视视频输入 左视视频输入 左LED灯 右视视频输入 右LED灯 后视视频输入
序 号 15 16 17 18 19 20 21 22 23
项目 远光灯信号 左转向信号 右转向信号 倒车信号 TF卡接口 USB接口 USB接口2 外壳地线 3PIN串口
视频输出
倒车输出 IR接收 外部传感器输 入 重力/振动感应 器
24
25 26
预留接口
电源指示灯 无线按键
13
14
27
28
HDMI
GPSபைடு நூலகம்
功 能 对 比
功能树
功 能 对 比
功 能 对 比
功能树
功能树
功 能 对 比
14
图像位置调节
调整视频输出位置偏移
功 能
序号 15 16 17
项目 输出图像调节 静态车模效果 动态车模效果
说明 调整对比/色彩/饱和度 车模的颜色可调/10样式可选择 车模轮子转动、转向灯闪烁
18
19
开/关全景输出
导出/入标定数 据 车模 车型选择 光学镜头选择 感光芯片选择 摄像头镜像选 择 自动校正 标定步骤提示 动态倒车轨迹 智能互联控制 车道偏离
6
7 8 8 9 10 11 12 13
远程监控
录像播放功能 格式化存储设备 低电压保护功能 显示模式选择 视频输出格式 视频输入格式 拍照功能 显示范围调节
定位,监控,锁定等
本机播放录制的录像 格式化连接主机的存储设备 保证车辆能够正常点火 切换显示2D/3D 输出P/N制式 视频输入支持P/N制 拍照锁定 图像显示范围多级可调
常 规 参 数 对 比
序 号 1 2
东莞市索恒电子科技有限公司360度全景泊车系统培训手册

网址:
关于一些客户的问题解答:
问:你们的360°全景安全系统太贵了,我了解的才几百块。 答:首先我要肯定的是,您所了解的360°全景系统和我们 的是完全不一样的。目前市场上的一些360°全景系统,多 是使用简单的切割器切割画面进行拼接,做不到完完全全的 全景,仍然存在死角,所谓的360°全景只是炒作的一个概 念。而我公司是通过无缝拼接完成的全景影象,不存在任何 死角, 全车周围360°的景象均能一目了然,类似于卫星图 像一样。且我们安装的360产品均是原厂品质,带有四方位 行车记录仪功能,有效实时记录行车情况,便于物殊情况下 的便于取证。360度安全系统除了一些高端车型原厂自带以 外,同级别车型还没有这个系统,您装上这套系统,可以显 出车子的高配风采;让客户更有面子。所以,从实用性、质 量以及客户需求方面,价格定位是非常合理的。
网址:
贴心提示:
高速行驶时不建议使用全景影像,以免因注意力分散造成 事故,但在低速行驶,停车泊车、塞车等情况下,可使用 该产品,能有效避免刮蹭、碰撞等问题发生。 外露摄像头切勿刮擦,以免损伤镜头造成成像模糊。 遥控器和U盘不使用的情况下尽量放在储物箱,避免丢失。 产品镜头有防水功能,雨天出行及洗车养护不用担心。镜 头表面有水时可使用柔软棉布或棉柔纸巾轻轻擦拭。
网址:
3பைடு நூலகம்0度全景安全系统工作原理
网址:
360度全景安全系统产品外观效果
左视
右视
前视
网址:
360度全景安全系统产品外观效果
前视
后视
左视
网址:
网址:
360度全景安全系统操作指南
触发设置:产品安装好后,启动电源,双按双闪灯触发 360度全景影像,亦可通过打左右转向灯操控杆触发到 360度全景影像界面。挂倒档时自动切换到该界面,导 航画面显示后面影像和全景影像。 行车记录功能:产品配备4G内存,可同时记录四路行车 状况一个半小时左右,存储满盘时后面录制的画面会自 动覆盖前面的影像。通过遥控设置,可记录单路的行车 状况,亦可选择四路的行车影像记录。具体设置方式, 参照安装说明。 夜视功能:左右两侧后视镜底壳上装有LED灯,360度 安全系统启动时,LED灯会自动开启,夜间使用效果明 显提升。
汽车360度影像的操作方法-概述说明以及解释
汽车360度影像的操作方法-概述说明以及解释1.引言1.1 概述概述汽车360度影像是一种新兴的技术,在汽车行业中得到了广泛的应用。
它通过多个摄像头捕捉到车辆周围的实时影像,并通过图像处理技术将这些影像融合在一起,形成一个全景视角。
这种技术能够提供给驾驶员全方位的视觉信息,使其在驾驶过程中更加安全、便捷。
随着汽车行业的迅猛发展,驾驶安全和舒适性成为了消费者选购汽车的重要考虑因素。
汽车360度影像技术的出现正是为了满足这一需求。
通过将多个摄像头安装在车辆不同位置,包括前后、左右、上下等方向,可以实时监控车辆周围的情况。
驾驶员可以通过车内显示屏观看到清晰、全面的画面,无论是行驶中的盲区检测还是泊车辅助,这项技术都能够提供准确可靠的影像信息。
在汽车360度影像的操作方法方面,驾驶员可以通过操纵中控系统来控制显示屏上的影像。
一般情况下,系统会自动切换到最适合当前驾驶状态的视角,如前后视角、鸟瞰视角等。
同时,驾驶员也可以手动选择不同的视角,以满足个人的需求。
在这篇文章中,我们将详细介绍汽车360度影像的应用场景和操作方法。
同时,我们还将总结目前该技术的优势和不足,并探讨其未来的发展前景。
通过本文的阅读,读者将对汽车360度影像有更深入的了解,并进一步认识到它在提升驾驶体验和行车安全方面的重要性。
1.2 文章结构文章结构部分的内容:文章结构是指整篇文章的组织方式和章节安排。
对于本篇文章《汽车360度影像的操作方法》,其结构主要分为引言、正文和结论三个部分。
引言部分用于引入文章的主题和背景,包括概述、文章结构和目的等内容。
在概述中,可以简要介绍汽车360度影像的概念和应用,以引起读者的兴趣。
文章结构部分则是对整篇文章的章节安排进行说明,有助于读者更好地理解文章的布局和内容分配。
而目的部分则明确了本篇文章的写作目标和意义,可以通过指出本文将介绍汽车360度影像的操作方法来进行说明。
正文部分是论述文章主题的核心部分,本文主要关注汽车360度影像的操作方法。
360度无缝全景说明书

360°全景无缝行车记录仪产品说明书使用产品前请仔细阅读本说明书目录1) 使用入门 (3)简介 (3)主要组件 (3)面板接口 (4)2) 快速使用 (4)系统安装、调试 (4)调试工具的布置 (4)注意事项 (5)铺布 (5)调试 (6)更换摄像头 (11)异常情况打开画面关闭画面查看行车记录 (14)3) 基本操作 (14)了解系统交互组件 (14)遥控器 (14)用户操作界面指南 (16)遥控界面操作 (16)显示界面操作 (16)明亮度 (17)个性化 (18)行车记录 (19)常见个性化设置示例 (23)4) 帮助和支持 (24)5) 产品和安全信息 (24)6) 维修与维护 (25)常见故障及解决办法 (25)1) 使用入门了解系统的基本组成,以便开始使用。
产品简介360°全景行车记录仪系统,通过安装在车身前后左右的4个超广角摄像头,同时采集车辆四周的影像,经过专有的“实时图像畸变还原对接技术”对图像进行畸变还原->视角转化->图像拼接->图像增强等处理,最终形成一幅无缝的全景鸟瞰图。
该系统不但可以显示全景图,还可同时显示任一方向的单视图。
通过配合标尺线,驾驶员能够准确读出障碍物的位置和距离。
本产品内嵌了行车记录,能实时记录车辆行驶途中的影像,可为处理交通事故提供证据。
主要特点:1. 360度鸟瞰视图,无缝拼接 2. 行车安全与泊车辅助 3. 前后左右高清摄像头行车记录 4. 完善的工程模式设置和独有的画面自动校准功能;5.停车监控(可选)主要组件组成部件如图所示面板接口1、TF卡插槽2、主信号接口3、电源接口4、系统运行状态灯(正常时有规律的闪烁 )5、电源指示灯(正常使用时常亮)6、2位拨码★说明:2位拨码的配置通常在上电之前起作用。
左侧拨码在PAL档时视频输出PAL制式,在NTSC档时视频输出NTSC制式;右侧拨码在N档时为正常启动模式,在C档时为升级模式。
360度全景泊车辅助系统解析

实用标准文案360度全景泊车辅助系统—使用说明书360度全景泊车辅助系统使用说明书欢迎使用360全可视泊车辅助系统。
本使用说明书讲解了正确使用360全可视泊车辅助系统的必要事项。
在使用前,请务必仔细阅读。
本说明书中的插图仅为示意图,实际使用请以实物为准。
精彩文档产品概述360全可视泊车辅助系统通过安装在车身前后左右的4个广角摄像头,同时采集车辆四周的影像,经过图像处理单元矫正和拼接后,形成一幅车辆四周的360度全景俯视图,实时传送到中控台的显示设备上。
通过360全可视泊车辅助系统,驾驶员坐在车中即可直观地看到车辆所处的位置以及车辆周围的障碍物,从容操控车辆泊车入位或通过复杂路面,有效减少刮蹭、碰撞、陷落等事故的发生。
产品组成360全可视泊车辅助系统主要包括一个图像处理单元和四个广角摄像头,如图1、2所示。
通常,左、右摄像头分别安装在左、右后视镜下方,前、后摄像头分别安装在前、后保险杠上方。
根据车型不同,摄像头的外观和具体的安装位置有所差异。
图1 图像处理单元精彩文档图2 摄像头精彩文档显示界面360全可视泊车辅助系统的视频可输出至单独的液晶屏,也可以通过原车安装的DVD进行显示输出。
360全可视泊车辅助系统的输出画面具有三种模式,分别适用于不同的场景:1、全景视图模式。
系统开机时,默认处于此显示输出模式。
全景视图模式由鸟瞰图显示区和前、后影像显示区组成。
鸟瞰图显示区车身前、后、左、右的显示范围分别在2米、3米、2.5米、2.5米左右。
由于镜头角度、畸变等原因以及安全考虑,画面显示的车身并非完全同实际车身位置和大小一致,请注意留足安全距离。
前、后影像显示区显示前或后摄像头采集的影像。
精彩文档图4 全景视图模式右下方的标志指示当前显示的是哪个摄像头显示的影像,如图5所示。
前后图5 前后标志2、后台视图模式汽车启动后,当无任何操作的时候,系统自动进入后台四分立界面进行录象模式,如图6所示。
图6 前视图模式精彩文档3、左右视图模式A、在视频画面显示的画面下,当打左转向或右转向时,显示车轮附近的影像。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
13
工作原理
原始图像
畸变校正和图像拼接
图像融合
14
工作原理
全景处理单元
四个180度超广角摄像头
➢ 左右摄像头安装在后视镜下方,前摄像头安装在车标或中网位 置,后摄像头安装在牌照灯位置,均采用专车专用设计。
15
功能说明
全景 前后左右 (固定) (可切换显示)
产品介绍
1、左边的全景图的拍摄范围为10.5m×7m。即车前2m,车后3.5m,车左右各2.5m。 2、带ESP 的车型,倒车时显示倒车轨迹引导线。 3、前、后、左、右视图都带精确的标尺线。 4、倒车时自动输出视频,视频的右侧图自动切换到后视。取消倒车时右侧图自动切换到 前视,15 秒后自动关闭视频。 5、非倒车时,可用薄膜按键切换出视频,短按按键切换不用视图,长按按键关闭视频。
16
全景泊车影像系统 功能特点
17
产品优势
18
产品优势
一、无缝拼接
道可视(DOWCAUSE)
英菲尼迪FX35原厂
文本内容
19
产品优势
二、内置倒车轨迹
道可视(DOWCAU省加装轨迹费用 ➢节省安装时间
20
产品优势
三、高清图像
道可视(DOWCAUSE)
其他公司产品
;.
5
产品介绍 某品牌 (不拼接)
英菲尼迪原厂(有缝拼接)
奥德赛原厂(有缝拼接)
道可视(DOWCAUSE)(无缝拼接)
6
产品介绍
轨迹功能仅适合配有汽车电子稳定系统的车型。将车钥匙转至ON档位时,汽车仪表显 示区如果有ESP、VSC、VSA、DSC等信息显示(约3秒钟),然后自动熄灭,证明该车 型配备有汽车电子稳定系统。
4
产品介绍 普通后视
倒车轨迹(皇冠原厂)
全景影像(英菲尼迪原厂)
➢只能看到车后的障碍物
➢只能知道如何倒车
➢四周情况一览无余
传统的倒车可视系统是由一个摄像头和一个显示器构成。当系统工作的时候,屏幕上 会显示2条不会变化的标尺线,倒车的时候驾驶人员不能判断方向盘打多少度才不会碰到 车后的物品。智能轨迹倒车系统分别由是专车专用摄像头,显示屏(DVD主机的显示屏) ,图像处理器组成。当驾驶人员操作汽车倒车的时候,显示屏上会动态的显示2条倒车引 导线,代表后车轮的运行轨迹。随着方向盘转动,倒车引导线就随即转动。这样驾驶人员 仅仅能判断如果按照这个角度倒车下去,车是否会撞到车后的物品。
文本内容
最少4倍
21
产品优势
四、超大广角
道可视(DOWCAUSE)
文本内容
其他公司产品
22
产品优势
五、调试简单
道可视(DOWCAUSE)
文本内容
其他公司产品
15分钟
>2小时
23
THANKS
24
7
产品介绍
8
产品介绍
9
产品介绍
10
全景泊车影像系统 工作原理
11
原理实现
产品介绍
全景泊车影像系统通过安装在车身前后左右的4个超广角摄像头,同 时采集车辆四周的影像,经过图像处理单元矫正和拼接后,形成一幅车辆 四周的全景俯视图,实时传送到中控台的显示设备上。驾驶员坐在车中即 可直观地看到车辆所处的位置以及车辆周围的障碍物,从容操控车辆泊车 入位或通过复杂路面,有效减少刮蹭、碰撞、陷落等事故的发生。
全景泊车影像系统 产品介绍
1
目录
产品介绍 01
工作原理 02
功能特点 03
安装调试
2
全景泊车影像系统 产品介绍
3
随着图像和计算机视觉技术的快速发展,越来越多的技术被应用到汽车电子领域,传 统的基于图像的倒车影像系统只在车尾安装摄像头,只能覆盖车尾周围有限的区域,而车 辆周围和车头的盲区无疑增加了安全驾驶的隐患,在狭隘拥堵的市区和停车场容易出现碰 撞和刮蹭事件。为扩大驾驶员视野,就必须能感知360°全方位的环境,这就需要多个视 觉传感器的相互协同配合作用然后通过视频合成处理,形成全车周围的一整套的视频图像 ,就是有这类需求,全景视觉泊车辅助系统应运而生。