通信原理第9章同步原理
网同步 通信原理

网同步通信原理网同步通信原理是指在传输数据时,发送端和接收端由一个共享的时钟信号驱动,以保持数据传输的同步性。
在网同步通信中,同步信号由发送端产生,并通过通信链路传输到接收端,接收端根据同步信号来恢复发送端的时钟信号,以确保数据传输的正确性。
为了更好地理解网同步通信原理,我们可以从发送端和接收端的角度来分析。
在发送端,首先将待发送的数据按照一定的编码方式进行编码。
编码的目的是将原始数据转换为可以在物理链路上传输的电子信号。
常见的编码方式有非归零编码(NRZ)、曼彻斯特编码、差分曼彻斯特编码等。
接下来,发送端根据时钟信号将编码后的数据进行调制。
调制的目的是将数字信号转换为模拟信号,以便在物理链路上传输。
调制常用的方式有频移键控(FSK)、相移键控(PSK)、振幅键控(ASK)等。
经过调制后的信号被发送到物理链路上,通过传输介质传输到接收端。
在接收端,接收到发送端发送的调制信号后,需要进行解调和解码操作,以恢复原始数据。
首先,接收端对接收到的调制信号进行解调。
解调的目的是将模拟信号转换回数字信号。
解调采用与发送端相对应的调制方式,将模拟信号转换为数字信号。
接下来,接收端根据发送端的时钟信号,将解调后的数字信号进行解码。
解码的目的是将接收到的数字信号转换为原始数据。
解码使用与发送端相对应的解码方式,将数字信号转换为原始数据。
为了保证数据传输的同步性,发送端需要周期性地发送同步信号。
同步信号的作用是告诉接收端数据的开始和结束位置,以及数据的传输速度。
接收端根据同步信号来恢复发送端的时钟信号,使得数据能够按照正确的速度被接收和处理。
在网同步通信中,同步信号通常以比特流的形式传输。
同步信号可以是时钟信号本身,也可以是辅助的同步信号,例如同步码、同步字等。
接收端根据同步信号的边沿来恢复发送端的时钟信号。
需要注意的是,网同步通信要求发送端和接收端的时钟信号保持一致。
如果时钟信号不一致,就会导致数据传输中的位偏移和位错,从而引起数据传输错误。
通信原理简答题及答案

通信原理简答题及答案第一章绪论1-2 何谓数字信号?何谓模拟信号?两者的根本区别是什么?答:数字信号:电信号的参量值仅可能取有限个值。
模拟信号:电信号的参量取值连续。
两者的根本区别是携带信号的参量是连续取值还是离散取值。
1-3何谓数字通信?数字通信偶哪些优缺点?答:利用数字信号来传输信息的通信系统为数字通信系统。
优点:抗干扰能力强,无噪声积累传输差错可控;便于现代数字信号处理技术对数字信息进行处理、变换、储存;易于集成,使通信设备微型化,重量轻;易于加密处理,且保密性好。
缺点:一般需要较大的传输带宽;系统设备较复杂。
1-4 数字通信系统的一般模型中各组成部分的主要功能是什么?答:信源编码:提高信息传输的有效性(通过数字压缩技术降低码速率),完成A/D转换。
信道编码/译码:增强数字信号的抗干扰能力。
加密与解密:认为扰乱数字序列,加上密码。
数字调制与解调:把数字基带信号的频谱搬移到高频处,形成适合在信道中传输的带通信号。
同步:使收发两端的信号在时间上保持步调一致。
1-5 按调制方式,通信系统如何分类?答:基带传输系统和带通传输系统。
1-6 按传输信号的特征,通信系统如何分类?答:模拟通信系统和数字通信系统。
1-7 按传输信号的复用方式,通信系统如何分类?答:FDM,TDM,CDM。
1-8 单工、半双工及全双工通信方式是按什么标准分类的?解释他们的工作方式。
答:按照消息传递的方向与时间关系分类。
单工通信:消息只能单向传输。
半双工:通信双方都能收发消息,但不能同时进行收和发的工作方式。
全双工通信:通信双方可以同时收发消息。
1-9 按数字信号码元的排列顺序可分为哪两种通信方式?他们的适用场合及特点?答:分为并行传输和串行传输方式。
并行传输一般用于设备之间的近距离通信,如计算机和打印机之间的数据传输。
串行传输使用与远距离数据的传输。
1-10 通信系统的主要性能指标是什么?答:有效性和可靠性。
1-11 衡量数字通信系统有效性和可靠性的性能指标有哪些?答:有效性:传输速率,频带利用率。
码元同步《通信原理》
码元同步1.外同步法(1)外同步法的概念外同步法是指在发送码元序列中附加码元同步用的辅助信息,在信号中加入导频或数据序列,以达到提取码元同步信息的目的的技术,又称辅助信息同步法。
(2)外同步法的原理在发送信号中插入频率为码元速率(1/T)或码元速率的倍数的同步信号;在接收端利用窄带滤波器将其分离出来,并形成码元定时脉冲。
(3)外同步法的特点优点:设备较简单。
缺点:需要占用一定的频带宽带和发送功率。
2.自同步法自同步法不需要辅助同步信息,而是从接收的码元序列中经过某种变换提取出定时信息的方法。
(1)开环码元同步法①开环码元同步法的概念开环码元同步法是指将解调后的基带接收码元先通过某种非线性变换,再送入一个窄带滤波电路,从而滤出码元速率的离散频率分量的同步方法,又称非线性变换同步法。
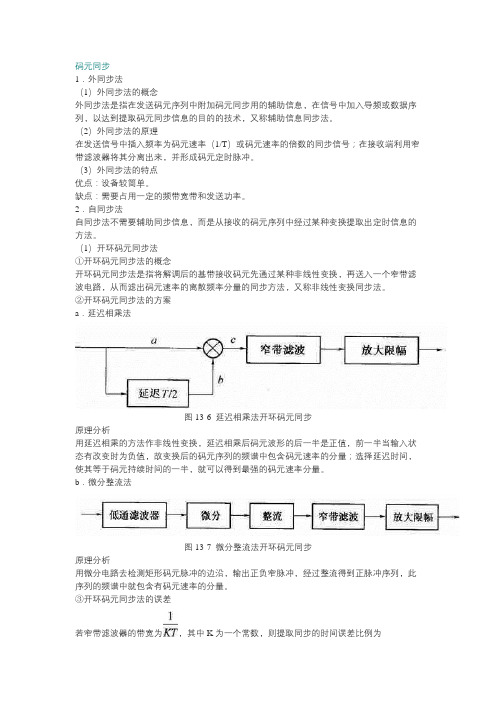
②开环码元同步法的方案a.延迟相乘法图13-6 延迟相乘法开环码元同步原理分析用延迟相乘的方法作非线性变换,延迟相乘后码元波形的后一半是正值,前一半当输入状态有改变时为负值,故变换后的码元序列的频谱中包含码元速率的分量;选择延迟时间,使其等于码元持续时间的一半,就可以得到最强的码元速率分量。
b.微分整流法图13-7 微分整流法开环码元同步原理分析用微分电路去检测矩形码元脉冲的边沿,输出正负窄脉冲,经过整流得到正脉冲序列,此序列的频谱中就包含有码元速率的分量。
③开环码元同步法的误差若窄带滤波器的带宽为,其中K为一个常数,则提取同步的时间误差比例为式中,为同步误差时间的均值;T为码元持续时间;E b为码元能量;n0为单边噪声功率谱密度。
(2)闭环码元同步法①闭环码元同步法的概念闭环码元同步是指将接收信号和本地产生的码元定时信号相比较,使本地产生的定时信号和接收码元波形的转变点保持同步的方法。
②闭环码元同步法的实现a.原理框图图13-8 超前/滞后门同步原理方框图图中有两个支路,每个支路都有一个与输入基带信号m(t)相乘的门信号,分别称为超前门和滞后门。
载波同步《通信原理》

载波同步1.有辅助导频时的载频提取(1)锁相环的应用为了用相干接收法接收不包含载频分量的信号,在发送信号中加入一个或几个导频信号。
在接收端用锁相环将其从接收信号中滤出,用以辅助产生相干载频。
(2)锁相环的原理框图图13-1 锁相环原理方框图2.无辅助导频时的载波提取采用非线性变换的方法从信号中获取载频。
(1)平方环①原理框图图13-2 平方环原理方框图②原理分析(以2PSK信号模型为例)a.输入信号s(t)(13-1-1)式中:m(t)=±1。
b.将式(13-1-1)平方,得s2(t)(13-1-2)c.由式(13-1-2)可知,接收信号中包含2倍载频的频率分量,将此2倍频分量用窄带滤波器滤出后再作二分频,即可得出所需载频。
③存在问题a.相位含糊产生原因:二分频器的输出电压有相差180°的两种可能相位,即其输出电压的相位决定于分频器的随机初始状态。
解决方法:发送端采用2DPSK体制。
b.错误锁定产生原因:平方后的接收电压中有可能存在其他的离散频率分量,致使锁相环锁定在错误的频率上。
解决方法:降低环路滤波器的带宽。
(2)科斯塔斯环(同相正交环法)①原理框图图13-3 科斯塔斯环法原理方框图②原理分析a.接收信号s(t)(式(13-1-1))送入二路相乘器,两相乘器输入的a点和b点的压控振荡电压分别为b.v a和v b分别和接收信号电压相乘,得到c点和d点的电压,经过低通滤波器,再通过相乘器,得g点的窄带滤波器输入电压,在(φ-θ)很小时,代入m(t)=±1化简v g,得c.电压υg通过环路窄带低通滤波器,控制压控振荡器的振荡频率,这个电压控制压控振荡器的输出电压相位,使(φ-θ)尽可能地小,当φ=0时,υg=0。
压控振荡器的输出电压υa就是科斯塔斯环提取出的本地载波。
③特点a.同时兼有提取相干载波和相干解调的功能;b.两路低通滤波器的性能完全相同;c.科斯塔斯环法提取出的载频存在相位含糊性。
天津大学现代通信原理课后习题答案(5-9章)
解;
(1)∵“0”和“1”分别由g(t)和-g(t)组成 而其对应的频谱分别为G(f)和-G(f)故其双边功率谱为
其功率为
(2)因为矩形脉冲的频谱为
∵τ=TS故ωTs/2=Kπ时为零点
即f=Kfs时均为零点,故该序列不存在离散分量fs。
(3)∵τ=TS/2 故 ωTs/4=Kπ时为零点
即f=2Kfs时为零点,而fS的奇数倍时存在离散分量Fs。
(2) 若保持误码率Pe不变,改用非相干解调需要接收信号幅度A是多少?
解:
B=2RB=2×104HZ
Pe=2.055×10-5
(1)在相干解调时 ASK
(2)在非相干解调时
6-7 传码率为200波特的八进制ASK系统的带宽和信息速率。如果采用二进制ASK系统,其带宽和信息速率又为多少?
解:
(1) N=8时 B=2RB=2×200=400HZ
第六章 数字信号的频带传输
6-1 设数字信息码流为10110111001,画出以下情况的2ASK、2FSK和2PSK的 波形。
(1) 码元宽度与载波周期相同。
(2) 码元宽度是载波周期的两倍。
解:
(1)
(2)
6-2 已知数字信号{an}=1011010,分别以下列两种情况画出2PSK,2DPSK及相对码{bn}的波形(假定起始参考码元为1)。
(2)求匹配传递函数与冲激响应及t0;
(3)该信道噪声谱为n0=10-10W/Hz,信号幅度A=1V,持续时间T=1s,求输出最大信噪比;
(4)求输出信号表达式并画出其波形。
(1)解:
(2)解:
(3)
(4)
6-14若某二进制先验等概率FSK信号的最佳接收机,其输入信号能量与噪声功率密度之比为14分贝,试算其误码率。
数字通信原理冯穗力等编著教辅材料.pdf

《数字通信原理》(冯穗力等编著)教辅材料习题汇编(修订稿)冯穗力余翔宇刘梦华周珮诗等编2014-7-1《数字通信原理》习题解答修订说明本习题是为配合《数字通信原理》第二版的修订稿,在修订稿中去除了第一版习题中有欠缺的内容,补充了部分更有针对性习题,使其能够更好的与教材的内容相适配。
欢迎各位使用本教材的老师提出进一步的修改意见。
冯穗力2014-7-1目录第一章绪论 (4)第二章信号分析基础 (5)第三章模拟信号的数字编码 (9)第四章信息论基础 (12)第五章数字基带传输系统 (17)第六章数字载波调制传输系统 (22)第七章传输信道 (27)第八章差错控制编码 (31)第九章同步原理与技术 (36)第十章扩展频谱通信技术 (40)第十一章信道复用与多址技术 (42)第一章绪论1.1数字通信系统有哪些主要的功能模块,这些功能模块各起什么作用?1.2对于已调的数字信号,呈现为连续的信号波形,如何理解它传输的是一个数字信号?1.3已知一个数字传输系统的比特速率为64kbps,如果采用一个十六进制的系统传输这些数据,其符号速率是多少?该系统的频带利用率为多少?1.4试述数字通信的优点有哪些?为什么?1.5已知二进制信号在3min内共传送了72000个码元,(1)问其码元速率和信息速率分别是多少?(2)如果码元脉冲宽度保持不变,但改为八进制数字信号,则其码元速率和信息速率又为多少?1.6已知某八进制数字传输系统的信息速率为3600 bit/s,接收端在1h内共收到216个错误码元,求系统的误码率。
1.7已经A、B两个八进制数字传输系统,他们的码元传输速率相同,在接收端相同时间Tm 个错误比特,试比较两个系统那个性分钟内,A共接收到m个错误码元,B共接收到3能比较好?为什么?第二章 信号分析基础2.1 若确知信号为()()t u e t f at -=,试求其能量谱密度、能量和自相关函数。
2.2 (a )试证明题图2.2所示的三个函数在区间(-2,2)上两两正交。
usart同步通信原理
usart同步通信原理USART(Universal Synchronous/Asynchronous Receiver Transmitter)是一种通用的同步/异步收发器,常用于计算机与外设之间的串行通信。
与其他通信接口相比,USART具有使用简便、传输速率高、可靠性强等优点,广泛应用于工业自动化、通信设备、嵌入式系统等领域。
本文将详细介绍USART 同步通信的原理。
一、USART概述USART是一种支持同步和异步通信的串行通信接口。
它包含了发送和接收两个单独的模块,可以独立进行串行数据的发送和接收。
USART的工作模式可以是同步模式,也可以是异步模式。
同步模式下,由外设设备提供时钟信号,数据通过USART与时钟信号同步传输。
异步模式下,USART通过内部时钟信号进行数据传输。
二、USART同步通信原理USART同步通信是指数据传输的时钟信号由外部设备提供的通信方式。
在同步模式下,数据包含位同步的时钟信号,可以实现更稳定可靠的数据传输。
USART同步通信的原理如下:1. 产生时钟信号:在USART同步模式下,时钟信号由外设设备提供。
外设设备通常会产生一个固定频率的时钟信号,用于同步数据传输。
时钟信号可以是周期性的矩形波形。
2. 数据传输:数据传输分为发送和接收两个过程。
发送过程:当发送数据时,USART根据时钟信号的上升沿或下降沿来判断数据位的变化。
一般情况下,数据传输的时刻是在每个时钟信号的下降沿或上升沿进行的。
每个数据位都映射到一个时钟信号的周期。
发送方按照时钟信号的节拍,将数据按位发送。
接收过程:当接收数据时,接收方根据时钟信号的上升沿或下降沿来采样传输的数据。
接收方在每个时钟信号的节拍来临时,采样接收到的数据位。
发送和接收过程通常以字节为单位进行,即发送或接收一个字节的数据。
USART通信支持多种数据位宽,如8位、9位等。
一个字节的数据包括起始位、数据位、校验位和停止位。
3. 通信协议:USART同步通信需要一种规定的通信协议,以确保发送方和接收方之间的数据传输正确可靠。
同步通信原理
同步通信原理同步通信原理是指在通信过程中,发送方和接收方通过协调和配合的方式进行交互,以确保信息的准确和完整传输。
在同步通信中,发送方在发送数据之前必须等待接收方发送确认信号,确认接收方已经准备好接收数据,并且在接收数据之后发送确认信号给发送方,表示数据已经成功接收。
同步通信原理的基本步骤如下:1. 发送方发起数据传输请求:发送方向接收方发送数据传输请求信号,告知接收方即将开始数据传输。
2. 接收方确认准备就绪:接收方接收到数据传输请求后,发送确认信号给发送方,表示已经准备好接收数据。
3. 发送方发送数据:接收到接收方的确认信号后,发送方开始发送数据。
4. 接收方确认接收:接收方在接收完数据后,发送确认信号给发送方,表示数据已经成功接收。
同步通信原理的优点包括:1. 数据可靠性高:通过等待接收方的确认信号,可以确保数据在传输过程中不会丢失或损坏。
2. 同步性强:发送方和接收方通过协调和配合的方式进行交互,使得数据的传输速度更加稳定和可控。
3. 适用于实时性要求高的应用:同步通信原理可以在通信过程中实时地确认数据传输的状态,使得在实时性要求高的应用中得到更好的表现。
然而,同步通信原理也存在一些缺点:1. 通信效率相对较低:由于发送方需要等待接收方发送确认信号,因此在数据传输过程中会产生一定的延迟,导致通信效率相对较低。
2. 对于网络传输不稳定:如果网络传输不稳定或延迟较大,同步通信原理可能导致传输失败或延迟过高。
3. 对硬件资源要求较高:同步通信原理需要发送方和接收方通过协调和配合的方式进行交互,因此需要较高的硬件资源支持。
总之,同步通信原理通过发送方和接收方的协调和配合,实现了数据的准确和完整传输。
在实际应用中,我们需要根据具体的通信需求和网络环境选择合适的通信原理。
通信原理_(完整)
第2章 信道
消 息
信号
信 源
发 送 设 备
信 道
噪声
接 收 设 备
信 宿
发送端
接收端
通信系统模型
信道
信道:信号传输的通道(媒介)。Βιβλιοθήκη 信道狭义信道 广义信道
狭义信道:传输媒介 广义信道:传输媒介及有关的设备
狭义信道
架空明线
有线信道
对称电缆
同轴电缆
光纤
无线信道
狭义信道
有线信道
中长波地波
用途 相位键控PSK、 DPSK、 数据传输、 数字微波、 空间 QPSK等 通信
其他高效数字调制QAM、数字微波、 空间通信 MSK等
脉幅调制PAM 中间调制方式、 遥测 中间调制方式 遥测、 光纤传输 市话、 卫星、 空间通信 军用、 民用电话 电视电话、 图像编码
脉冲模拟调制
脉冲 数字 调制 脉冲数字调制
24k的值应在ttst0瞬间对rt抽样此抽样值为抽样时刻采样周期与码元同宽时偏保证最大信噪比由码型决定信息序列输出序列判决信号码间干扰随机噪声加性干扰第k个基本接收波形在抽样时刻的取值确定的依据常数无码间干扰的基带传输理想的传输波形无码间干扰的基带传输奈奎斯特第一准则如果信号经传输后整个波形发生变化但只要其特定点的抽样值保持不变仍然可以准确无误地恢复原始信码这就是奈奎斯特第一准则又称为第一无失真条件的本质
连续信道/模拟信道。
编码信道:
编码器输出端到译码器输入端的所有设备和媒介。 研究编码时,常用编码信道。 离散信道/数字信道。
连续信道:信道输入、输出的信号取值是连续的。 离散信道:信道输入、输出的信号取值是离散的。
现代通信原理课件_曹志刚钱亚生_清华大学出版社_第九章资料
不经过调制直接进行数字信号 的传输的传输方式称为数字信号的 基带传输。
数字基带信号含有大量的低频 分量以及直流分量。
4
数字信号传输的基本方式
基带传输 频带传输
经过调制,利用载波传输调制 后的频带信号的传输方式称为数字 信号的频带传输。
5
基带传输系统的组成
用来产生适合 于信道传输的 基带信号
三元码
信号交替反转码 HDBn码 HDB3码
多元码
M进制码 2B1Q码 ISDN所应用的144kbps
10
9.1.2二元码(1)
单极性非归零码 双极性非归零码
单极性归零码 三者的特点
Hale Waihona Puke — Not Return Zero code在整个码元期 间电平保持不变. — 零电平和正电平分别对应着二进制 代码0和1.
13
9.1.2二元码(1)
单极性非归零码 双极性非归零码
单极性归零码 三者的特点
1. 具有丰富的低频分量和直流分量。 不能用于采用交流耦合的信道传 输。
2. 如果出现长“1”或“0”序列, 没有跳变,不利于接收端时钟信 号的提取。
3. 不具有检测错误的能力,相邻码 之间不存在相关制约的关系
14
9.1.2二元码(2)
20
9.1.2二元码(2)
差分码 数字双相码
传号反转码
密勒码 5B6B码
特点:
“1”码元中点处跳变 “0”单个0不跳变 “0”连0,“0”码之间跳变
21
9.1.2二元码(2)
差分码 数字双相码
传号反转码
5B6B码
编码规则:
将5位二元输入码编成6位 二元 输出码。
22
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
mt
ct t cos1t 1
cr t cos 2 t 2
3
接收端作相干解调,得
z t mt cos1t 1 cos 2t 2
低通滤波器后输出差频,得
mt
因此,要求收发端同频同相。
1 mt cos1 2 t 1 2 2
10.4.1 帧同步的方法
为了实现群同步,可在数字信息流中 插入一些特殊码字作为每个群的头尾标记。 实现方法:连贯式插入法和间隔式插 入法。
27
1、起止同步法
7.5个码元 止 起 止
5个码元 (信息)
2、连贯式插入法 连贯式插入法就是在每群的开头集中插 入群同步码字的同步方法。该方法的关键是 需要找到一个特殊的帧同步码组。巴克码
23
T1 T2 1 F1 1 F2
F2 F1 F1F2
F 2 F0
F T1 T2 F0 T1 T2 F0 T0
T0 K F tc F0 1 1 tc 或 F F K tc K
或 tc 1 F 2 2F0 K F0
位同步脉冲输出 输入相 位基准 控制电路 (扣除门 和添加门 脉冲)
相位比 较 器
n次分频
晶振及 整 形
3、直接从频带信号中提取同步信号 另一种常用的波形变换方法是对带限信 号进行包络检波。
21
9.3.4 位同步系统的性能指标 位同步系统的性能指标除了效率以外, 主要有以下几方面 1、相位误差 由上图可见一个码元周期内由晶振来的 脉冲数为n个,因此,最大调整相位为:
32
第一帧
第二帧
第三帧
插入的一个群同步码元 共 24 8 192 位 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
1 2 3 4 5 6 7 8
33
c 收码 e 异 或 门 d 分路定时脉冲 本 地 群 码
插入导频法的优缺点主要表现在;
(1)可以利用它作为自动增益控制;
(2)多消耗一部分不带信息的功率。
13
9.2.3 载波同步系统的性能指标 载波同步系统的主要性能包括:效率、 精度、同步建立时间和同步保持时间。 1、载波同步精度
精度是指提取的同步载波与载波标准比 较,它们之间的相位误差大小。 (1)稳态相位误差
4
4.多相移相信号中提取同步信息
数字通信中经常使用多相移相信号,这 类信号同样可以利用多次方变换法从已调信 号中提取载波信息。
10
9.2.2 插入导频法 1、双边带信号中插入导频
插入的位置应在频谱位零处,导频与加 在调制器的那个载波移相90°后的所谓“正 交载波” 。
mt
相乘 调制 带通 相加 输出
概 述
信 源
压 缩 编 码
保 密 编 码 信 调 信 解 道 编 码 制 道 调 信 道 解 码 保 密 解 码
压 缩 信 解 宿 码
信源编码
噪声
同步
信源解码
发送端
接收端
1
数字通信系统模型
同步需要解决的问题
要实现信号的正确传输,要求接收机产生的 信号与发射机发送过来的信号具有相同的频率与 相位关系,称具有相同频率和相位的时间关系的 两信号为同步信号。
N
延迟一位 a 位同步码
f
禁 门
b
逐码移位法的基本原理:由位同步脉冲 经过n次分频以后的本地群码与接收到码元中 间歇式插入的群同步码进行远码移位比较, 使本地群码与发送来的群同步码同步。
34
1 a b
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
c
1
2
3
1
2
3
1
2
3
d d1
d2
1
2
3
1
2
3
1
2
3
e e1
u0 t
u0 t
带通
相乘器
vt
低通
输出
mt
ac sin c t
2 相移
fc 窄带滤 波器
2相移
其输出信号可表示为: u0 t ac mt sinct ac cos ct
11
收端乘法器输出为:
vt ac mt sin c t ac cos c t ac sin c t ac2 mt ac2 mt ac2 cos 2 c t sin 2 c t 2 2 2
2Q
Kv
14
0
(2)随机相位误差 从物理概念上讲,正弦波加上随机噪声 以后,相位变化是随机的,它与噪声的性质 和信噪功率比有关。 n0 f 0 2 n 1 2r 2 2A Q 2、载波同步的效率 3、同步建立时间和保持时间 建立时间 保持时间
28
巴克码
它的特殊规律是:若一个n位的巴克码 {x1, x2, x3,…, xn},每个码元xi 只可能取值+1 或-1,则它必然满足条件
R j
x x
i 1
n j
i i j
n 0 ,1,1
当 j 0 当 0 j n
R(j) 6 4 2 -6 -4 -2 2 4 6
整形
2、波形变化法 插入导频法的另一种形式是使数字信号的 包络按位同步信号的某种波形变化。
19
9.3.3 直接法 当系统的位同步采用自同步方法时,发 端不专门发送导频信号,而直接从数字信号 中提取位同步信号。
1、滤波法
全占空码 波形变换 单极性归零码 fb窄带滤波器 移相 脉冲形成 位同步
20
2、采用锁相法提取位同步
9
经低通后的输出分别为 : 乘法器的输出为:
1 v 5 2 mt cos 1 v 6 mt sin 2
1 2 上式可以近似地表示为: v7 m t
1 2 1 2 v7 v5 v6 m t sin cos m t sin 2 4 8
e 360 n
22
2、同步建立时间ts
定义:失去同步后重建同步最所需的长 时间。 Tb 2 n
Tb n 2 故同步建立时间为: t s 2Tb N nTb N
3、同步保持时间tc 系统因为没有输入,使得收端位同步信 号的相位就会逐渐发生漂移,时间越长,相 位漂移量越大,直至漂移量达到某一准许的 最大值,就算失步了。
4
2、位同步 位同步:要求在接受端产生于发送端相 同码元重复频率,并且具有合适的相位位置。 3、帧同步 建立在位同步基础之上,通常由位同步 分频产生,关注的是为同步产生的位置。 4、网同步
5
9.1.2 按同步的实现方法分类 外同步法:在适当的位置,专门发送同 步信息。 自同步法:同步信息可以从信号中直接 提取出来。 在通信系统中,通常都是要求同步信息传 输的可靠性高于信号传输的可靠性。
36
这时漏同步概率的通式可以写为:
P 1 1
C p 1 p
r n r r 1
m
nr
2、假同步概率P2
在信息码中也可能出现与所要识别的群 同步码字相同的码字,这时识别器会把它误 认为群同步码字而出现假同步。
7
输入已调 信号
平方律部件
e(t)
2fc 窄带滤波器
二分频
载波输出
2. 平方环法
锁相环 输入已调 信号 平方律部件 鉴相器 环路滤 波器 压控振 荡器 二分频 载波输出
二分频电路提取出的载波存在π相位模 糊问题。
8
3. 科斯塔斯环
v3
mt cos c t 输入已调 信号
低通
v5
载波输出
载波同步
数字信号同步
位同步 群同步(字同步) 网同步
2
9.1 同步的分类
9.1.1 按同步的功能分类 功用来分:同步可以分为载波同步、位 同步(码元同步)、帧同步(群同步)和网 同步(通信网中用)。 1、载波同步
mt cos1t 1 mt
×
BPF BPF
×
z t
LPF
巴克码识别器 识别器用10级移位寄存 器、相加器和判决器就可以 组成,具体结构如图所示。
29
判决
相
加
0 (7)
1
0 (6)
1
0 (5)
1
0 (4)
1
0 (3)
1
0 (2)
1
0 (1)
1
输入 码元
移动方向
巴克码 (a) t 1 1 1 0 0 1 0 信息码 一群 (b) t t1
30
巴克码 1 1 1 0 0 1 0
Hf
2、残留边带信号中插入导频
f 1
fr
f 2
f1
fc fm
fc
f2
f1 f c f m f1 f 2 f c f r f 2
12
3、直接法和插入导频法的比较 (1)不占用导频功率;
(2)防止导频和信号间的互相干扰;
(3)防止信道不理想引起导频相位误差 。
v1
压控振 荡器 环路滤 波器
2 相移
v7
v2 v4
低通
v6
1 v 3 mt cos c t cos c t 2 mt cos cos2 c t 1 v 4 mt cos c t sin c t mt sin sin2 c t 2
6
9.2 载波同步
9.2.1 直接法(自同步法)