Samkoon远程控制(AK-R触摸屏)功能操作说明
三菱触摸屏 -GOT-A900系列操作手册(入门篇)
A-2Leabharlann A-2[布线注意事项] ! 警告
在否开则始就布会线导之致前触,电在、所产有品阶损段坏务或必误保动作证。GOT 外部电源断开。
! 注意
请接否确地则保方会式导GO(致T 三触电级电源接或模地误块方动的作式FG。)端或子更、高L等G 端级子的和接保地护方接式地。端子接地,接地方式采用 GOT 专用的 D 级 在否确则定会额导定致电火压灾和或产故品障最。终布线之后,正确连接 GOT 电源模块。 在特定扭矩范围内拧紧 GOT 电源部分的末端螺钉。 不拧拧得紧过会紧造会成因触损电坏或螺误钉动或作模。块而造成触电或故障。 布线时要小心避免异物如碎屑、电线包装纸等进入模块。 否则会导致火灾、连接失败或误动作。 检插否查接则总总会线线因是时接否,触将完不总全良线插引电入起缆。故插障入。已连接好的模块的连接器上,直到听到“咔恰”一声。 和插不末接拧端通紧信螺会电钉造缆。成。触将电通或信误电动缆作。插入已连接好的模块的连接器上,在特定的扭矩范围内拧紧装配 拧得过紧会因损坏螺钉或模块而造成触电或误动作。
2000 三菱电机
A-5
A-5
介绍
感谢您选择三菱 GOT(图形操作终端)。 在使用该设备之前,请仔细阅读本手册,以在使用时发挥设备的最佳性能。
内容
有关手册 ................................................................................. A- 8 本手册所包含的缩略语及专用术语 ........................................................... A- 9
第一章 基础知识
1- 1 ~ 1- 4
安川机器人远程控制总结 _机器人端

安川机器人远程控制总结一、m aster程序1、master程序的设置单击【主菜单】—>选择屏幕上的【程序内容】—>【新建程序】,如图1-1。
图1-1单击【选择】显示如图1-2所示的界面,单击【选择】,输入程序名,单击软键盘【ENTER】,显示如图1-3所示的界面,单击【执行】,此处程序名为“MASTER”,程序创建完毕。
图1-2图1-3单击【主菜单】—>选择屏幕上的【程序内容】—>【主程序】,如图1-4。
图1-4单击【选择】,显示如图1-5所示的设置主程序界面。
图1-5单击【选择】,出现如图1-6所示的界面,单击【向下】选择“设置主程序”。
图1-6显示如图1-7所示的界面,单击【向下】选择“MASTER”单击【选择】。
如图1-7主程序设置完毕。
2、MASTER程序的编辑单击【主菜单】—>选择【程序内容】—>【选择程序】—>【选择】,出现如图1-7所示的界面,单击【向下】,选择“MSATER”,单击【选择】。
在如图2-1所示的界面下编辑主程序。
图2-1此处以2个工位,每个工位3种工件的工作站为例创建主程序内容,需要熟悉机器人示教器的基本操作(如【命令一览】【插入】【回车】【选择】)。
插入DOUT OT#(1) OFF程序举例:光标定位在左侧行号处,如图2-2,如图单击【命令一览】,选择【I/O】,单击【选择】,选择【DOUT】,如图2-3所示的界面图2-2图2-3单击【选择】,显示如图2-4所示的界面,光标定位在“DOUT”上,单击【选择】,显示如图2-5所示的界面,光标定位到“数据”行的ON,单击【选择】,切换成“OFF”,单击两次【回车】则可出入该指令。
需要指出的是在光标定位处插入指令是向下插入。
图2-4图2-5程序内容如下(安装在机器人中的MASTER程序见附件MASTER):第二行的NAME才是机器人控制器登录的程序名,单纯的修改文件名不能改变程序名/JOB//NAME MASTER//POS///NPOS 0,0,0,0,0,0//INST///DATE 2016/06/01 17:13///ATTR SC,RW///GROUP1 RB1NOP''=初始化=DOUT OT#(1) OFFDOUT OT#(2) OFF'=初始化=''=主程序=*MAIN'***工位1判断***JUMP *JOB1 IF IN#(6)=ON'***工位2判断***JUMP *JOB2 IF IN#(7)=ON'***无工位被选中***JUMP *MAIN'=主程序=''=工位1工件选择程序=*JOB1'***把IGH#(1)的4位赋给B000***DIN B000 IGH#(1)'***当B000=1跳到*JOB1-1标签*** JUMP *JOB1-1 IF B000=1'***当B000=2跳到*JOB1-2标签*** JUMP *JOB1-2 IF B000=2'***当B000=3跳到*JOB1-3标签*** JUMP *JOB1-3 IF B000=3 '***当无工件被选中,暂停***PAUSEJUMP *MAIN'=工位1工件选择程序=''=工位2工件选择程序=*JOB2'***把IGH#(1)的4位赋给B000***DIN B000 IGH#(1)'***当B000=1跳到*JOB2-1标签*** JUMP *JOB2-1 IF B000=1'***当B000=2跳到*JOB2-2标签*** JUMP *JOB2-2 IF B000=2'***当B000=3跳到*JOB2-3标签***JUMP *JOB2-3 IF B000=3'***当无工件被选中,暂停***PAUSEJUMP *MAIN'=工位2工件选择程序=''=工位1的1#工件焊接调用=*JOB1-1DOUT OT#(1) ONCALL JOB:JOB1-1DOUT OT#(1) OFFJUMP *MAIN'=工位1的1#工件焊接调用=''=工位1的2#工件焊接调用=*JOB1-2DOUT OT#(1) ONCALL JOB:JOB1-2DOUT OT#(1) OFFJUMP *MAIN'=工位1的2#工件焊接调用=''=工位1的3#工件焊接调用=*JOB1-3DOUT OT#(1) ONCALL JOB:JOB1-3DOUT OT#(1) OFFJUMP *MAIN'=工位1的3#工件焊接调用=''=工位2的1#工件焊接调用=*JOB2-1DOUT OT#(2) ONCALL JOB:JOB2-1DOUT OT#(2) OFFJUMP *MAIN'=工位2的1#工件焊接调用=''=工位2的2#工件焊接调用=*JOB2-2DOUT OT#(2) ONCALL JOB:JOB2-2DOUT OT#(2) OFFJUMP *MAIN'=工位2的2#工件焊接调用=''=工位2的3#工件焊接调用=*JOB2-3DOUT OT#(2) ONCALL JOB:JOB2-3DOUT OT#(2) OFFJUMP *MAIN'=工位2的3#工件焊接调用=END指令含义如下:IGH#()指令包含4个点,IGH#(1)包含IN#(1)—IN#(4),依次类推二、安川IO基板及端子台1、IO基板和端子台介绍机器人控制柜标配后面板4个机器人通用IO基板CN306~CN309(共40个IO,但是通用IO只有24个,其余16个作为专用IO,IO均是NPN信号,其中的CN307上的OUT17---OUT24为继电器输出,注意订货时端子板和数据连接线是否需另外购买。
联动触摸开关使用说明书
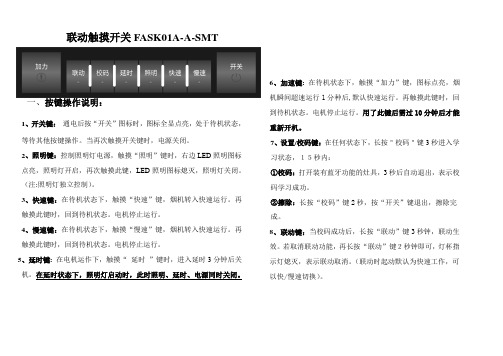
联动触摸开关FASK01A-A-SMT
一、按键操作说明:
1、开关键:通电后按“开关”图标时,图标全显点亮,处于待机状态,等待其他按键操作。
当再次触摸开关键时,电源关闭。
2、照明键:控制照明灯电源,触摸“照明”键时,右边LED照明图标点亮,照明灯开启,再次触摸此键,LED照明图标熄灭,照明灯关闭。
(注:照明灯独立控制)。
3、快速键:在待机状态下,触摸“快速”键,烟机转入快速运行。
再触摸此键时,回到待机状态。
电机停止运行。
4、慢速键:在待机状态下,触摸“慢速”键,烟机转入快速运行。
再触摸此键时,回到待机状态。
电机停止运行。
5、延时键:在电机运作下,触摸“延时”键时,进入延时3分钟后关机。
在延时状态下,照明灯启动时,此时照明、延时、电源同时关闭。
6、加速键:在待机状态下,触摸“加力”键,图标点亮,烟机瞬间超速运行1分种后,默认快速运行。
再触摸此键时,回到待机状态。
电机停止运行。
用了此键后需过10分钟后才能重新开机。
7、设置/校码键:在任何状态下,长按"校码"键3秒进入学习状态,15秒内:
①校码:打开装有蓝牙功能的灶具,3秒后自动退出,表示校码学习成功。
②擦除:长按“校码”键2秒,按“开关”键退出,擦除完成。
8、联动键:当校码成功后,长按“联动”键3秒钟,联动生效。
若取消联动功能,再长按“联动”键2秒钟即可,灯杯指示灯熄灭,表示联动取消。
(联动时起动默认为快速工作,可以快/慢速切换)。
深圳显控触摸屏用户手册

深圳显控 SamDraw 组态软件
用户手册 V3.3
注意 (1) 未经同意,不得对本书的部分或全部内容进行转载、复制。 (2) 本手册的内容,包括规格会有所变动,恕不另行通知。 (3) 本书力求严谨,若您发现不明、错误之处,请与手册卷末公司地址联络,并告知手 册封面上的编号
关于商标等事项 ●Windows 是美国Microsoft 公司的注册商标。 ●可编程序控制器(PLC)名称为各公司的产品。
安全注意事项 在此将安全注意事项分为[危险]、[注意]两种。 危险:误操作会引起险情,有可能造成死亡或重伤。 注意:误操作会引起险情,有可能造成中度损伤或轻伤。 但标记为注意的事项在某种场合会造成严重事故。 请务必遵守记载事项。
警 告
● 在安装、拆卸、连接导线、保养或检测之前,请将电源关闭,否则会导致触电、误操 作或故障发生。 ● 请在触摸屏外部设置紧急停止回路、连锁装置等。否则触摸屏发生故障会引起机械损 坏或造成事故。 ● 通电时请不要触摸端子等有电部分。否则会引起触电。
注 意
● 请不要使用在开箱时发现已损坏或变形的产品,否则会导致故障或误操作。 ● 请不要使本机受到如坠落或翻倒等类似冲击,否则会造成产品损坏、故障。 ● 请在操作说明书及使用手册规定的环境下保管及使用。 在高温、多湿、结霜、灰尘、腐蚀性气体、油污、有机溶剂、润滑剂、大振动、冲击 等环境下保管及使用,有可能造成触电、火灾、误动作等故障。 ● 请在确保安全的情况下,在运行中传送画面数据。否则有可能因误操作造成机械破损 或故障。 ● 在软件工作中(与连接设备通讯)请不要关闭电源,否则会造成数据丢失、机器损坏 或故障。 ● 请在手册中规定的软件动作环境下使用及操作。否则会造成故障、误动作。 ● 确实连接通信电缆并紧固。否则有可能造成故障、误动作。
波尔远程控使用说明书

波尔远程控制使用说明书———————————————波尔远程控制是一款历史悠久、使用稳定的计算机行为管理的远程监控软件,主要提供工作绩效管理、屏幕、摄像头监控以及文件管理、系统维护、消息通知等功能, 并可提供C/S+B/S的WEB集合及更多的增值服务。
本产品能够通过Internet网、局域网进行计算机的远程监控管理,可用于公司管理层对员工计算机的监视、商家对于店面的监控等。
通过本产品,不论是员工在工作、聊天、上网、玩游戏都能通过行为记录、屏幕等功能进行监控和统计,为企业对员工状况了解提供最直观的数据;本产品的多画面摄像头监控功能,可用于不同岗位、店面的工作状况监控;远程数据传输功能可方便的进行文件上传、下载、运行、删除等操作;系统维护功能包含了注册表、服务、进程、窗口、DOS命令等功能,是远程进行电脑维护的得力助手。
主要功能:•行为监控:通过监控被控端窗口变化来得出被控端操作记录,并且可以以图表统计方式显示。
•屏幕监控:屏幕实时监控以及远程模拟操作、自动截图等。
•摄像头监控:可同时选择多个或单个被控端视频设备来进行实时监控或图像捕捉、录像。
•磁盘文件管理:以经典windows资源管理器风格来管理文件,可进行上传、下载、删除、复制、重命名等常用的操作。
•其它系统操作:包括执行DOS命令,窗口、进程、注册表、系统服务的管理,以及系统关机、重启。
波尔远程控制界面预览目录一.安装 (4)二.注册 (4)三.基本设置 (4)1.端口映射 (4)2.动态域名 (4)3.空间上线 (4)四.功能介绍 (4)❖被控端 (4)1.生成被控端 (4)2.批量更新被控端 (4)3.更新被控端连接地址 (5)4.更新被控端连接端口 (5)5.断开被控端 (5)6.关闭被控端 (5)7.卸载被控端 (5)8.进程筛选 (5)9.窗口标题筛选 (5)10.特征筛选 (5)❖磁盘 (6)1.磁盘文件管理 (6)2.网络计算机 (6)❖屏幕 (6)1.屏幕实时操作 (6)2.自动截屏 (7)3.播放动画 (7)4.停止播放 (7)5.循环播放所有被控端动画 (7)❖系统 (7)1.进程管理器 (7)2.注册表编辑器 (8)3.系统服务管理 (8)4.执行DOS命令 (8)5.注销 (8)6.重新启动 (8)7.关闭计算机 (8)8.系统信息 (8)❖窗口 (9)1.行为监控 (9)2.设置行为监控高亮关键字 (9)3.所有被控端当前行为 (9)4.取当前窗口列表 (9)5.打开网址 (9)❖其它 (9)1.操作所有被控端 (9)2.发送提示信息 (10)3.视频墙 (10)4.摄像头监控 (10)5.麦克风监听 (11)6.播放 WAV MID (11)7.停止音乐播放 (11)❖程序 (11)1.系统设置 (11)2.设置被控端备注 (11)3.分组设置 (11)4.动态域名 (12)5.FTP 自动更新IP设置 (12)6.查看操作日志 (13)7.设置透明度 (13)8.访问我们的网站 (13)9.检查更新 (13)10.可用时间查询 (13)一.安装本软件无需安装。
sukon触摸屏视频输入显示
SuKon人机视频(影像)
输入显示部件使用说明
一.简介:
为了满足客户的需求,推出新功能:视频输入显示。
实现对视频的实时监控,满足客户对当前情况的最新最快的了解掌握。
三:示例使用说明
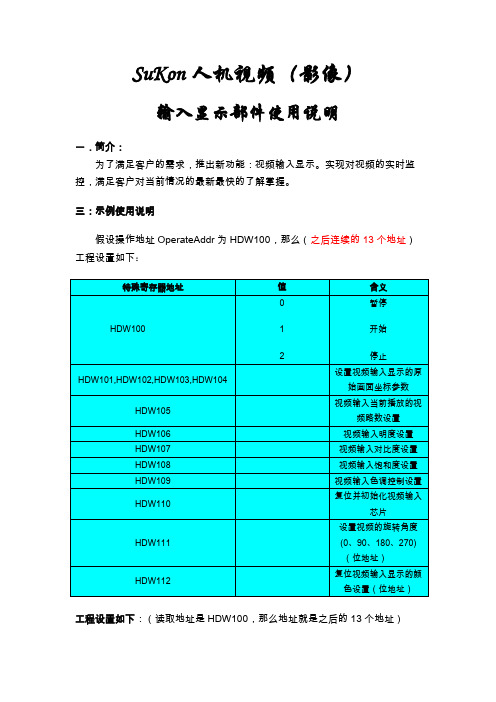
假设操作地址OperateAddr为HDW100,那么(之后连续的13个地址)工程设置如下:
工程设置如下:(读取地址是HDW100,那么地址就是之后的13个地址)
四:关于属性的设置
关于路数的设置
最大支持4路视频输入(同一时间只能显示其中一路),设置范围0~3,0显示第0路,1显示第1路,以此类推。
关于复位的设置
当寄存器位输入时,会复位视频输入的设置。
所有的设置会恢复为系统默认值。
关于旋转角度的设置
A.旋转角度范围0~3,分别对应旋转0度,旋转90度,旋转180度,旋转
270度
B.旋转90度和270度有会影响图片的处理速度,尽量少用
C.在竖屏的HMI中,必须设置旋转角度,某则按照默认横屏处理
五:注意事项:
A.此视频输入信号显示在最高层,任何弹出键盘,画面,等窗口。
都会被视频显示区域所覆盖。
B.视频信号必须设置好其显示区域,明度,对比度,饱和度,色调
等设置,否则会照成显示异常,如果不会设置,请按照默认设
置,如果设置错误,请使用复位设置功能。
C.在PAL制式下,视频输入视频源输入最大输入312行。
D.在NTSC制式下,最大只有256行,请自行设置好视频的最大
行数,如果在NTSC制式下,使用312行画图,有可能照成最
56(312-256)行数据显示错误。
Samkoon远程控制AKR触摸屏功能操作说明
S a m k o o n远程控制A K R触摸屏功能操作说明文档编制序号:[KKIDT-LLE0828-LLETD298-POI08]Samkoon远程控制(AK-R触摸屏)功能操作说明一、概述远程控制主要用于HMI与PLC的1:1串口连接,支持RS232/422/485,然后将单一设备引入工厂系统,实现物联网及广域网的控制。
其原理是将HMI串口连接到远程控制器的COM1,PLC串口连接到远程控制器的COM2口,原理图如下:二、远程PC(或手机APP)监控功能1、打开“RemoteHMI”软件,双击“COM配置”,配置远程控制器(或HMI选择远程客户端)参数,配置远程控制器连接的PLC及参数,配置IP参数(客户端在HMI参数设置里配置),指定远程控制器的IP,添加到指定的WIFI(如更换WIFI,需要在此指定配置后下载)2、新建画面,可添加连接设备或PLC的相关变量进行监控和控制操作,如下图:3、然后,找到RemoteHMI安装后的位置,点击打开“”文件,这样PC才能通过服务器远程监控数据,如下图:4、打开浏览器,输入:,如没有用户,请先注册用户再行登录,如下图:5、登录后,添加远程控制器(AK-HMI则是背后的SN序列号)的SN,一般远程控制器正上部会贴有“RG+12位数字”,输入后,在远程控制器上插入U盘,点击获取验证码,正常情况下,会听到“滴”的一声,说明获取验证码成功,拔出U盘,插入电脑,打开U盘里“”文件,提取验证码,输入到浏览器,确定添加设备成功,如下图:浏览器添加设备提取U盘的验证码6、下载对应的HMI组态工程项目到HMI,PLC程序到PLC,一切配置成功,我们就可以通过PC打开“pcAppsys”或者手机APP打开“HMI Client”远程监控PLC的数据了,如下图:7、这样即可进入对应画面远程监控PLC数据。
注意这儿的监控画面是独立于HMI工程画面,对关键参数的监控,需要独立编程组态。
显控(samkoon)HMI人机界面在五轴喷涂机上运用
Samkoon触摸屏在五轴喷涂机上的应用
该设备完全数字化电脑操作,可记忆存储资料参数,图形显示界面人性化,喷涂调试简单,一般工件调试在15分钟内完成,程序编写是以工件某一个表面作为一个整体程序段,避免了以往繁琐的程序清单。
在该设备中选用深圳显控(Samkoon)双串口人机界面作为上位监控系统,松下FP-X,三菱1S系列PLC作为下位机。
设备总共2个PLC,6轴脉冲输出,两套PLC程序要同时相互兼容运行,配方参数多,配方数据2个PLC要同时用并且要求参数同步。
使用深圳显控(Samkoon)双串口人机界面直接通讯2台PLC,COM1通过RS232通讯松下FP-X系列PLC,COM2通过RS422通讯三菱1S系列PLC。
通过资料传输功能,可以使2台PLC的参数通用。
其中P轴的脉冲参数是松下FP-X里面的地址传送给三菱1S的地址的。
配方功能强大,通过一键式按钮,可以在当前画面显示不同的配方参数,操作简单方便。
通过RWI0配方索引地址改变配方编号,就可以在当前画面的配方地址RWI1地址显示不同的配方参数。
在配方数据较多的情况下,显示全部配方参数简单直接。
提供现成的配方功能按钮包括下载配方到PLC、上载PLC配方到HMI、保存当前配方等
等。
为配方组态提供简洁高效的方法。
同时,还可以通过内部地址LB4013和LB4014来分别显示当前配方下载和上载的状态。
酷玛QM3G YHSC 触摸屏PLC一体机使用手册说明书
感谢您购买 C oolmay QM3G 系列一体机。
本手册主要说明该系列触摸屏PLC一体机的产品特性、一般规格和接线方法。
详细PLC编程请参见《Coolmay QM3G 系列一体机编程手册》;触摸屏部分参见《Coolmay TP 系列人机界面使用手册》。
产品信息1公司产品系列 : 系列2HMI类型 43: 4.3寸 50: 5寸 70/70H D /70K : 7寸 100: 10寸3输入输出点数 16: 8入8出 24: 12入12出 38: 20入18出 44: 24入20出 60: 30入30出等4模块分类 M: 通用控制器主模块5开关量输出类型 R: 继电器输出类型; T: 晶体管(MOS 管)输出类型; RT: 混合输出6模拟量输入点数 43/50可选4路,70/HD 可选12路,70K /100可选16路 7模拟量输出点数 43/50可选2路,70/70HD /70K /100可选8路8模拟量输入类型 E : E 型热电偶K PT :PT100 PT1000:PT1000 NTC :热敏电阻(10K /50K /100K ) A0: 0-20mA电流 A4: 4-20mA电流 V5: 0-5V电压 V: 0-10V电压 V5_:-5V ~5V 电压 V _:-10~10V 电压【仅7寸和10寸的可选负电压输入】 9模拟量输出类型 A0: 0-20mA 电流 A4: 4-20mA 电流 V5: 0-5V 电压 V : 0-10V 电压 V5_:-5V ~5V 电压 V _:-10~10V 电压【仅7寸和10寸的可选负电压输出,且占用两路DA 】10. C1表示单相高速计数,C2表示AB 相计数,C3表示ABZ 相计数;11P 表示高速脉冲;P表示高速脉冲;12选装通讯口 参见【表一:基本参数】. . . . . . . . . . 常规8路,高速计数+高速脉冲总发不能超过480KHz .QM3G QM3G FH FH FH FH FH FH FH FH FH FH FH FH FH FH FH (可定制型/T 型/S 型/J 型,支持负温) 常规单相6路60KHz 或AB (Z )相2路30KHz +AB 相 1 路5KHz010KHz 100KHz Y0-Y3为100KHz ,Y4-Y7为10KHz ; 命名规则QM3G 43FH 图1 安装尺寸图QM3G -100FHQM3G -43FHQM3G -70KFH电气设计参考产品构造RUN :PLC运行指示灯COM PLC与触摸屏 : 通讯上时快闪QM3G -43FH图3图6 -70KFHQM3G 硬件接口安装尺寸机械设计参考输入为ON 输入为OFF 滤波功能高数计数功能有滤波功能,滤波时间在0-60ms范围内可设,默认是10ms开关量继电器输出指标允许最大电流回路电源电压电路绝缘On响应时间机械寿命(无负载)电气寿命(额定负载)2A /点,4A /4点 COM ,5A /8点 COM ,5A /12点 COMDC 30V以下/AC 220V以下继电器机械绝缘约10ms1000万次30万次开关量晶体管(MOS 管)输出指标允许最大电流回路电源电压电路绝缘隔离电压(电源-外部端子)On响应时间高速输出频率MOS 管: 2A /点, 4A /4点 C OM ,5A /12点C OM :MT :0.5A /点,0.8A /4点 C OM , 1.6A /12点 C OMDC24V 光耦绝缘1500VAC高速输出:10μs;其他:0.5ms 模拟量输入指标输入信号响应时间模拟量输入点数精度PT100/PT1000/热电偶/NTC/0-10V/0-5V /-10~10V /-5~5V /0-20mA/4-20mA/1个扫描周期0-16路12位模拟量输出指标输出信号模拟量输出点数精度0-5V/0-10V/0-20mA/4其他按客户要求定制信号等-10~10V /-5~5V /-20mA/0-8路12位外部接口通讯口环境条件工作温度相对湿度储存温度振动频率0°C~50°C5%~95%RH -20°C~70°C10-57Hz,振幅0.035mm; 57Hz-150Hz,加速度4.9m/s ² (X、Y、Z三方向各10次,合计各80分钟)基本参数触摸屏PLC一体机常见型号规格QM3G -43FH /50-16MR FH QM3G FH FH -70K /100-38M R QM3G FH FH --48M R 70K /100开关量模拟量(最大可选)通讯口(可选)高速计数高速脉冲DI DO AD DA 触摸屏PLC 单相AB相ABZ相输出2018242443FH /50FH:MT 为MOS 管输出;70FH /70HD 70KFH /100FH :MT 时Y0-Y3 为MOS 管输出,Y4-Y35 为晶体管输出;MR 为继电器输出;MRT 为混合输出。
泰克仪器使用
测量波形数据
要进行自动测量,请执行下列操作: 1. 按“测量”。 2. 按“添加测量”。 3. 旋转多功能旋钮a 选择特定的测量。如果 需要,可旋转多功能旋钮b 选择要测量的通 道。然后按“执行添加测量”。 4. 要删除测量,按“清除测量”。然后按要 删除的测量的侧面bezel 菜单,或者按“删除 所有测量”。然后按“执行删除测量”。
按选择出现4条光标时按选择可以改变可移动光标实线为可移动光标通过旋转通用旋钮来移按精细对多功能旋钮a和b进行粗调或细调切换
使用菜单系统,请执行下列操作: 1. 按某个前面板菜单按钮以显示要使用的菜 单 2. 按屏幕下方 或侧面按钮选择菜单项。 如 果出现弹出式菜单,旋转通用旋钮 a 选择所 需的选项。 3. 要清除侧面 菜单,按 Menu Off 4. 某些菜单选项需要设置数字值才能完成设 置。使用上方或下方通 用旋钮 a 和 b 来调整 数值。 5. 按下“精细”以关闭或打开进行细微调整 的功能。
台式数字万用表
实验内容
• 1、熟悉示波器、信号源、万用表前面板图 上各旋钮的作用; • 2、由信号源输出一个0.5v\1000Hz的方波 信号,送入示波器,用光标量测法测量其幅 值、周期、频率; • 3、由信号源输出一个有效值为3v\1000Hz 的正弦信号,送入示波器,在示波器上读 取有效值、峰峰值、周期、频率。
使用光标进行手动测量
1. 按“光标”
可以改变光标状态。光标的三种状态分别为:屏 幕上不显示光标;显示两个垂直波形光标;显示两 个垂直光标和两个水平光标。 两个垂直光标出现在选定的屏幕波形上时,旋转 通用旋钮a 时,可以将一个光标向左或右移动。旋 转旋钮b 时,移动另一个光标。
2. 按“选择”
出现4条光标时,按“选择”,可以改变可移动 光标,实线为可移动光标,通过旋转通用旋钮来移 动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Samkoon远程控制(AK-R触摸屏)功能操作说明
一、概述
远程控制主要用于HMI与PLC的1:1串口连接,支持RS232/422/485,然后将单一设备引入工厂系统,实现物联网及
广域网的控制。
其原理是将HMI串口连接到远程控制器的COM1,PLC串口连接到远程控制器的COM2口,原理图如下:
二、远程PC(或手机APP)监控功能
1、打开“RemoteHMI”软件,双击“COM配置”,配置远程控制
器(或HMI选择远程客户端)参数,配置远程控制器连接的
PLC及参数,配置IP参数(客户端在HMI参数设置里配置),
指定远程控制器的IP,添加到指定的WIFI(如更换WIFI,
需要在此指定配置后下载)
2、新建画面,可添加连接设备或PLC的相关变量进行监控和控
制操作,如下图:
3、然后,找到RemoteHMI安装后的位置,点击打开“”文件,
这样PC才能通过服务器远程监控数据,如下图:
4、打开浏览器,输入:,如没有用户,请先注册用户再行登录,
如下图:
5、登录后,添加远程控制器(AK-HMI则是背后的SN序列号)
的SN,一般远程控制器正上部会贴有“RG+12位数字”,输
入后,在远程控制器上插入U盘,点击获取验证码,正常情
况下,会听到“滴”的一声,说明获取验证码成功,拔出U
盘,插入电脑,打开U盘里“”文件,提取验证码,输入到
浏览器,确定添加设备成功,如下图:
浏览器添加设备
提取U盘的验证码
6、下载对应的HMI组态工程项目到HMI,PLC程序到PLC,一
切配置成功,我们就可以通过PC打开“pcAppsys”或者手
机APP打开“HMI Client”远程监控PLC的数据了,如下图:
7、这样即可进入对应画面远程监控PLC数据。
注意这儿的监控
画面是独立于HMI工程画面,对关键参数的监控,需要独立
编程组态。
8、VNC模式,是对HMI全部工程画面的监控,需要数据量、通
信速率较高,目前也在持续开发中。
三、通过远程控制器下载上传PLC程序及监视PLC
1、首先配置虚拟串口,需要安装“软件,安装后,打开
“Configure Virtual Serial Port Driver”快捷方式,如
下图:
Add pair 添加配置了一组虚拟串口,案例中添加了COM1,2
2、在RemoteHMI,新建开关控件,关联功能“下载PLC程序”,
如下图:
3、下载到远程控制器,然后运行“PcAppSys”,点击“下载PLC
程序”,配置COM口,这边选1,则PLC那边选择COM2,测试通信这样就可以下载PLC程序了,如下图:
远程监控运行后,配置为COM1
PLC软件里配置为COM2,通信测试正常,就可以下载PLC程序了。
上载PLC也是一样,通信建立后亦可对PLC程序进行在线监控。
四、通过AK-R触摸屏连接外网下载HMI组态程序
1、在RemoteHMI软件,新建工程,COM配置选择“远程客户端”,组态开关控件,关联“下载组态程序”(HMI组态工程文件)
配置成功后,首先下载到远程控制器;
2、然后打开“AKWorkshop”软件打开要下载的工程,下载—选择U盘下载—转存为“”文件,点击“下载”即可存储到相应的位置,如下图:
3、然后PC上运行“pcAppsys”,选择对应的HMI进入监控画面,点击刚配置的“下载HMI程序”按钮,选择“”下载到HMI
(PC可和远程控制器不在同一网络下,即远程控制器为手机4G 路由wifi,PC采用公司电信网络)。
4、上传HMI组态也是一样
五、备注
深圳显控自动化
2015-12-18。