基于投影法的车牌定位研究
基于MSER与边缘投影的车牌定位算法
2019年1月计算机工程与设计Jan.2019第%〇卷第1期C O M P U T E R E N G IN E E R IN G A N D D E S IG N V ol. 40 No. 1基于M S E R与边缘投影的车牌定位算法郑贵林,吴黄子桑(武汉大学动力与机械学院,湖北武汉430072)摘要:针对基于颜色或边缘的车牌定位算法常出现误定位的问题,提出一种适用于嵌入式平台的基于M S E R与边缘投影 相结合的车牌定位算法。
对R G B彩色图像进行灰度变换突出车牌区域,使用M S E R算法进行连通域分析获取车牌位置;对于车牌和车身颜色一致的情况,设计垂直边缘投影算法进行孙充定位;利用车牌的字符间距特征进一步提高车牌定位的 准确度。
实验结果表明,该算法对车牌倾斜、弯折、光照不均、大小不一、背景杂乱、分辨率低等情况具有很好的鲁棒 性,准确率可达97.1b,适合应用于嵌入式车牌识别系统。
关键词:车牌定位;M S E R特征;边缘投影;字符间距特征;嵌入式平台中图法分类号!TP391.41 文献标识号:A文章编号$1000-7024 (2019) 01-0241-04d o i:10. 16208/1. is s n l000-7024. 2019. 01. 040Method of license plate location based on MSER feature and edge projectionZHENG Gui-lin,WU Huang-zi-sang(School of Power and Mechanical Engineering, W uhan U niversity, W uhan 430072, China)A b s tra c t:T o solve the problem of current license plate location algorithms based on color o date regions, a method of license plate location which combined MSER feature and edge projection algorit level transformation was applied on RGB color images to highlight license plate regions, M SER algorit connected component analysis to obtain the position of license plates. For the case of the color of the lice as the color of the car, vertical edge projection algorithm was designed for complementary. By using the character spacing feature ,the location accuracy was further improved. Experimental results show that the proposed method is robust to license t ilt , buckling , complex background and low resolution w ith97. 1% accuracy and it is suitable to be applied recognition system.K e y w o rd s:license p late location;MSER feature;edge projection;character spacing feature;embedded system platform/引言常用的车牌定位算法主要有3类。
基于投影法的车牌定位研究
基于投影法的车牌定位研究摘要:车牌识别系统是近几年发展起来的基于图像处理和字符识别技术的智能化交通管理系统。
车牌定位是车牌识别中的关键步骤。
为了能在复杂背景和不同光照条件下快速、准确地定位车牌位置。
提出了一种基于投影法的车牌定位方法。
该方法首先对车牌图像实施二值化、边缘检测等预处理,然后在此基础上,利用基于双向回溯的投影法确定车牌的上下左右边界。
实验结果表明,该方法定位准确。
关键词:车牌定位;行扫描;边缘检测;垂直投影Research of License Plate Locating Method Based on ProjectionAbstract: license plate recognition system is developed in recent years based on image processing and character recognition technologies intelligent traffic management system. License plate location is one of the key steps in the license plate recognition. In order to obtain accurate location of vehicle plate quickly under complicated background and different illumination condition, this paper proposes a kind of locating method based on projection. First, this method carries out preprocessing such as two-valuation and edge detection. Then the projection approach based on two-way back is adopted to examine up-down and left-right boundary of the car license. The experiment results indicate that the presented method is excellent in accuracy.Key words: license plate location; line scanning; edge detective; vertical projection0 引言车牌识别系统作为数字摄像、计算机信息管理、图像分割和图形识别技术在智能交通领域的应用,是智能交通管理系统中重要的组成部分。
基于数学形态学和投影法的车牌定位方法

【 摘 要】在车牌定位系统中, 针对图像 中存在的复杂背景、 车辆 自 身的车灯或标志这些因素的影响, 化、 灰度 拉伸 、 边缘检 测后 , 运用 数 学形 态学运 算和 车牌 自身 的宽高 比例初 步定位 出
车牌 区域 。然后 , 运用投 影法分别进 行水平 方 向和垂 直方 向的定 位 , 得到 准确 的车牌 区域 。该方 法 能够很 好地 排 除干扰 因素 , 精确定位 出车牌 。
ra g y s t r e t c h i n g nd a e d g e d e t e c t i o n o f t h e l i c e n s e p l a t e i ma g e,i t c a n u s e mo r p h o l o g i c a l o p e r a t i o n a n d t h e p r o or p t i o n o f t h e wi d t h nd a h e i g h t o f he t l i c e n s e
V 慨。 脚L 。 c 譬
【 本文献信息】马永慧, 薛丹丹 . 基于数学形态学和投影法的车牌定位方法[ J ] . 电视技术, 2 0 1 3 , 3 7 ( 7 )
一种基于纹理分析和投影法的车牌定位方法

个数必 大 于阈值 , 车牌 线 段长 度 也应 大 于 阈值 且
() a 原始图像
:
M , ≥ Ⅳ
∑i『 ()+∑ _ () .≥ 『
() 5
3 车牌 定 位 算 法 的 实现
3 1 车牌 图像预 处理 .
由于采集 到的车牌 图像常 易受到光 照 、 景 、 背 车 牌 污损 等因素 影 响 , 成 图像 质 量下 降 。 因此 在 进 造
【 稿 日期 】2 1 — 4 0 收 0 1 0 —1
2 纹 理 分 析 算 法
纹 理分 析是 指通 过一定 的 图像处理 技术 提取 出
纹 理 特 征 参 数 , 而 获 得 纹 理 的 定 量 或 定 性 描 述 的 从 处 理过 程 。首先 定义 图像基 元 , 是 由“ ” “ ” 它 0 和 1 组
[ yw r s i nepa ct n tx r nls ; r et nm to ;l esann Ke o d ]l e s l el a o ; et ea a i po ci eh d i cn i c t o i u ys j o n g
基于分块投影和形态学处理的多车牌定位方法
域 , 形 态学分 块处理 确 定车牌 的候 选 区域 , 用 最后 用车 牌 的特 征 去 除伪 车牌 , 定位 出多个车牌 。仿 真 实验 结 果表
明, 方法 能减 少车牌 候选 区域 , 高多车牌 定位 的效 率 。 该 提
关键 词 :多车牌 定位 ;灰 度特 征 ;分块投 影 ;形 态 学分块 处理
第2 9卷 第 7期
21 0 2年 7月
计 算 机 应 用 研 究
Ap l a i n Re e r h o o u e s p i to s a c fC mp t r c
Vo . 9 No 7 12 . 影 和 形 态 学 处 理 的 多 车牌 定 位 方 法
中图分类 号 :T 3 14 P 9. 1
.
文 献标 志码 :A
文 章编 号 :10 - 6 5 2 1 0 — 7 0 0 0 13 9 (0 2)7 2 3 — 3
d i 1 . 9 9 ii n 1 0 .6 5 2 1 7 0 0 o : 0 3 6 / s 0 1 9 0 2 0 9 . s. . . 3 .
b sdo e aa o r e t ea d m rh l y o ea o . i t ,t r rc s d a d o ea d tega g y h f o t ae n sp rt n po c v n op o g p rt n Fr l i p e o es n p rt h ry i e b o znM i j i o i sy p e e ma i df rneicudl a dte oio r addt o cnepa ogl b eaa o oi na po ci .h nidt — ieec ; o l o t sinf n i e fi s l eruh ysp t nhr ot r et n T e e c f t ce h p t o c a le t y r i z l j o t e
结合垂直投影法与固定边界分割的车牌字符分割算法(附源码和详细解析)
结合垂直投影法与固定边界分割的车牌字符分割算法(附源码和详细解析)上⼀篇博⽂简单有效的车牌定位算法(附源码和详细解析),详细介绍了数学形态学处理车牌粗定位与蓝⾊像素统计、⾏列扫描的车牌精确定位算法。
没有看的朋友可以先看上⼀篇博⽂。
这次,在牌照字符的分割上,我结合了⽬前使⽤最多的投影法和车牌固定边界的多阈值分割算法。
它的⼤致实现过程如下:第⼀步先对上⼀节粗定位完牌照的只有⿊⽩两⾊的图像bg2实施伪彩⾊标记。
第⼆步获取标记区域各连通块的尺⼨参数,⽤作下⼀步遍历的索引。
第三步投影得直⽅图,取⼀个分割阈值,划分出背景和字符的范围,也就是在直⽅图histrow(histcol)中区分⾕底点和上升点。
第四步分析峰⾕,得到例如最⼤峰中⼼距等参数。
最后⼀步,根据上⼀步求得的参数分割字符。
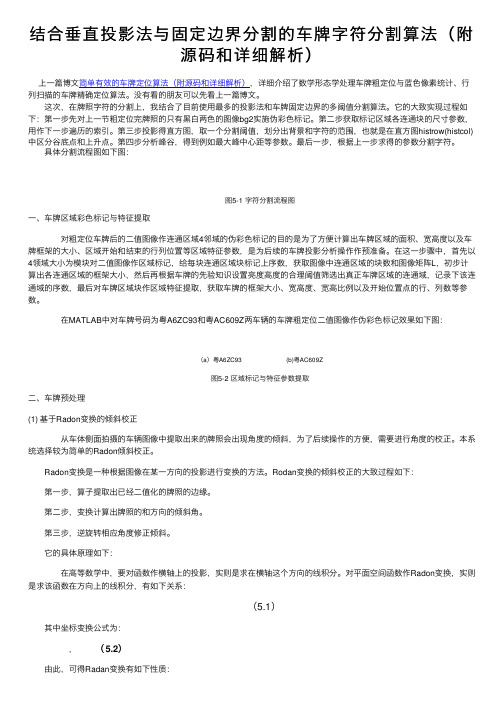
具体分割流程图如下图:图5-1 字符分割流程图⼀、车牌区域彩⾊标记与特征提取 对粗定位车牌后的⼆值图像作连通区域4邻域的伪彩⾊标记的⽬的是为了⽅便计算出车牌区域的⾯积、宽⾼度以及车牌框架的⼤⼩、区域开始和结束的⾏列位置等区域特征参数,是为后续的车牌投影分析操作作预准备。
在这⼀步骤中,⾸先以4领域⼤⼩为模块对⼆值图像作区域标记,给每块连通区域块标记上序数,获取图像中连通区域的块数和图像矩阵L,初步计算出各连通区域的框架⼤⼩,然后再根据车牌的先验知识设置亮度⾼度的合理阈值筛选出真正车牌区域的连通域,记录下该连通域的序数,最后对车牌区域块作区域特征提取,获取车牌的框架⼤⼩、宽⾼度、宽⾼⽐例以及开始位置点的⾏、列数等参数。
在MATLAB中对车牌号码为粤A6ZC93和粤AC609Z两车辆的车牌粗定位⼆值图像作伪彩⾊标记效果如下图:(a)粤A6ZC93 (b)粤AC609Z图5-2 区域标记与特征参数提取⼆、车牌预处理(1) 基于Radon变换的倾斜校正 从车体侧⾯拍摄的车辆图像中提取出来的牌照会出现⾓度的倾斜,为了后续操作的⽅便,需要进⾏⾓度的校正。
一种基于数学形态学和投影的车牌定位方法
T n ig e HuHo g ig B i n ig YagLl ag n ̄ , L i npn , aYapn , n i i
( H g f ce c, r iesyo hn,hn ia u n 3 0 1 Co e e i eNot Unv rt f ia sa x i a 0 0 5 ) oS n h i C ty
i r e O o an l c t n o e il lt u c l n c u a ey u d r c m p i ae a k r u d a d d f r n n o d r t bti o a i fv h ce p a e q ik y a d a c r t l n e o l t d b c g o n n i e e t o c
关键词 :车牌定位;边缘检测;数学形态学 ;投影
中图分 类号 : P 9 T 31 文献标 识码 : A
基于边缘跳变和投影法的车牌定位方法
基于边缘跳变和投影法的车牌定位方法作者:范璟来源:《价值工程》2011年第18期摘要:提出了一种基于边缘跳变和投影法的多级车牌定位方法。
该方法首先利用边缘跳变特征对车牌区域进行水平定位,得到一组水平区域;然后,通过垂直投影,利用车牌区域波峰—波谷—波峰密集特点定位车牌左右边界,得到候选车牌区域;最后,对多个候选车牌区域进行分析,剔除错误区域,得到粗定位的车牌区域。
并对粗定位车牌区域做进一步修正,获得最终的车牌区域。
本文提出的车牌定位方法在车牌倾斜角度较小(小于5度),图像拍摄距离为1.5m到2.5m条件下,能够较为准确的定位出车牌区域,对复杂背景、光照、车牌种类等条件不敏感。
Abstract: A Multi-level Location Method of License Plate is proposed based on edge changes and projection method. Firstly, it localizes the horizontal borderlines of LP by setting a threshold of the features of edge changes. Secondly, through the vertical projection, we realize vertical localization, by using license plate peak-trough-peak-intensive features, to get the candidate plate region. At last, we get the Coarse Location by analyzing candidate regions and excluding the error areas. And then we modify the coarse region further. The proposed method in this paper can accurately position the plate region when the tilt is small(less than 5 degrees)and the image shooting distance of 1.5m to 2.5m, and is not sensitive to complex background, light and car card type.关键词:车牌定位;边缘跳变;投影法Key words: license plate localization;edge changes;projection method中图分类号:TP391.41 文献标识码:A文章编号:1006-4311(2011)18-0147-020引言车牌定位是车牌识别的关键技术,主要是从所获取的图像中定位车牌所在的位置,并把车牌从该区域中准确地分割出来,以进行后续的字符分割和字符识别等处理[1]。
基于投影二分法的车牌字符分割方法
基于投影二分法的车牌字符分割方法。
洗允廷路小波施教钟琨
(东南大学南京210096)
摘薹在车牌字符分割中,传统的投影法对车牌图像质量的要求较高,受噪声影响较大,易 造成分割字符的粘连与断裂.在一定程度上影响了车牌的识别率。针对传统投影法的不足,文章提 出了一种基于投影二分{去的字符分剖算法,该方法能快速有效地把车牌字符准确地提取出来.实 验结果表明,该方法抗干扰能力强.能有效地抑制字符的粘连,减少字符的断裂.车牌识别准确事高.
车牌颜色有黄底黑字、黑底白宇、白底黑字、 蓝底白字等4种。当车牌为黄底黑宇或自底黑宇 时,二值化后的车牌图像为白底黑宇I当车牌为蓝 底自字或黑底白宇时,二值化后的车牌图像为黑 底白宇。为了便于统一处理,将车牌图像统一变换 为黑底白宇。对黑白像素进行统计,由于背景的像 素多于字体的像素,所以像素数量大的设置为 “o”,即黑色I像素数量少的设置为“l”。即白色,其 过程如图1所示.
5)按重新排列子图像。经过4)的分割,上一
步的L,已经变成了2个子图像,要把这2个子图 像按顺序插到字符子图像集合中,将原来的k,在
字符子图像集合中取消;跳回1)作新一轮的循环。 为了更清楚说明本算法,给出每一次循环的
结果如图5所示。图5(a)是已经定位的原始图像,
万方数据
基于投影二分法的车牌字符分割方法——冼克廷路小波施裁,等
匿9第4组实验结果图 7为了迸一步说明本方法有效性,通过对收费 站现场采集的300幅车牌图像进行垂直投影法与 投影二分法测试,实验结果如表1所列。
裹l实验结果裹
5结论
针对垂直投影法存在的不足,笔者提出了一 种基于投影二分法的车牌字符分割方法。该方法 通过多次寻找分割点来解决车牌分割过程中存在 的粘连和断裂现象,通过大量的实验表明,该方法 明显优于传统垂直投影方法,分剖率达到97.7%, 完全能应用到实际的车牌识别系统中。
基于投影法和数学形态学车辆牌照识别系统
钱士奎:基于投影法和数学形态学的车辆牌照识别系统图1.3含汽车牌照图像Fig.1.3Includethelicenseplatepictureoftheautomobile1.2.1我国车牌类型及特点世界各国的车牌干差万别,各不相同,要想找一个通用的车牌识别方法可谓困难至极,大多数研究都是针对某一种或某~地区车牌的,本文也只针对我国车辆牌照进行识别研究。
(1)我国车牌类型中华人民共和国公共安全行业标准对机动车号牌的分类、规格、颜色、适用范围有明确的规定。
可分为六大类:①小型汽车所用蓝底白字号牌:②大型汽车所用的黄底黑字号牌;③军用或警用的白底黑字、红字号牌;④国外驻华机构所用的黑底自字号牌;⑤摩托车号牌;⑥农用运输车、拖拉机号牌。
(2)车牌特征车牌定位的算法很多,不过,所有的车牌定位算法基本上都考虑了牌照区域的特点。
所以在此也有必要先了解一下车牌区域的特征,其大体可分为以下几类:①车牌的几何特征,车牌为矩形,宽、高比例在一定范围内,约在3.0—3.2之间;②车牌形状及字符格式特征,车牌有矩形边框,字符位于矩形框中且有间隔;③车牌区域的纹理特征,车牌区具有排列基本均匀的字符,在图像上表现为一定的纹理特征;大连理工大学专业学位硕士学位论文不过,尽管这些方法都存在这样或那样的缺点,还是有许多具体的车牌定位算法已被应用在成型的车牌识别系统中,如PaoloComelli[18】的基于水平线搜寻的定位方法等,这种应用极大的促进了车牌识别系统研究的积极性。
1.3字符分割技术字符分割就是把已经定位的车牌中的字符一个一个准确的分割出来,送入字符识别模块。
1.3.1车牌图像二值化在车牌字符的分割中,字符块的提取一般是基于二值图的垂直投影图,如图1.4(b)是图1.4(a)的垂直投影图(大小为56×170(a)(b)图1.4二值化车牌图像(a)及其垂直投影图(b)Fig.1.4Twovaluenumberplatepictures(a)andverticalprojectiondrawings(b)二值化后的车牌要能再现原字符图像,基本不出现笔画断裂和粘连现象,尽量不丢失原字符的特征。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于投影法的车牌定位研究摘要:车牌识别系统是近几年发展起来的基于图像处理和字符识别技术的智能化交通管理系统。
车牌定位是车牌识别中的关键步骤。
为了能在复杂背景和不同光照条件下快速、准确地定位车牌位置。
提出了一种基于投影法的车牌定位方法。
该方法首先对车牌图像实施二值化、边缘检测等预处理,然后在此基础上,利用基于双向回溯的投影法确定车牌的上下左右边界。
实验结果表明,该方法定位准确。
关键词:车牌定位;行扫描;边缘检测;垂直投影Research of License Plate Locating Method Based on ProjectionAbstract: license plate recognition system is developed in recent years based on image processing and character recognition technologies intelligent traffic management system. License plate location is one of the key steps in the license plate recognition. In order to obtain accurate location of vehicle plate quickly under complicated background and different illumination condition, this paper proposes a kind of locating method based on projection. First, this method carries out preprocessing such as two-valuation and edge detection. Then the projection approach based on two-way back is adopted to examine up-down and left-right boundary of the car license. The experiment results indicate that the presented method is excellent in accuracy.Key words: license plate location; line scanning; edge detective; vertical projection0 引言车牌识别系统作为数字摄像、计算机信息管理、图像分割和图形识别技术在智能交通领域的应用,是智能交通管理系统中重要的组成部分。
车牌识别技术可应用于道路交通监控、交通事故现场勘察、交通违章自动记录、高速公路超速管理系统、小区智能化管理等方面[1],为智能交通管理提供了高效、实用的手段。
所以对车牌识别技术的研究依然是目前高科技领域的热门课题之一。
车牌识别系统的成功设计、开发和应用具有相当大的社会效益、经济效益和学术意义。
基于图像处理的车牌识别系统一般包括以下五个部分:图1 车牌识别系统在实际应用中,车牌识别系统必须快速、准确、鲁棒地识别出车牌。
因此,在车牌识别过程中,车辆的检测、图像的采集、车牌的识别等都是重要的环节,其中关键的技术有[2]:1)车辆牌照区域定位技术,即把车牌部分的图像从整个图像中切分出来的过程。
2)车辆牌照字符切分技术,即对定位后的车牌区域中的字符进行切分和归一化处理,其中车牌的二值化和倾斜校正对于字符的切分和识别都是非常重要的。
3)车辆牌照字符识别技术,即将切分后的字符识别出来。
车牌定位是车牌识别系统完成图像采集后对图像进行处理的第一步,它的好坏直接关系到整个系统识别率的高低,并且对识别速度有很大的影响。
车牌不能准确定位意味着后面的识别过程都是无效的[3]。
由于车牌背景的复杂性与车牌特征的多样性,目前仍没有一个通用的智能化的车牌定位方法。
目前主要的车牌定位算法有基于彩色信息的方法、基于扫描行的方法、基于数学形态学的方法、基于神经网络的方法等几大类,结合这些基本方法与各种优化算法又派生出许多其他定位算法。
这些算法尽管在一定的条件下能够分割出车牌,但都有针对性和局限性,适用范围不大。
实际应用中车牌识别系统大多安装在室外。
受天气、背景、车牌磨损等很多客观的因素的影响,定位往往不理想。
本文提出一种基于投影法的车牌定位方法。
该方法首先对车牌图像进行二值化、边缘检测等预处理。
然后利用基于双向回溯的投影算法确定车牌的上下、左右边界,取得了良好的定位效果。
1 图像预处理对于采集的原始彩色图像需要转换成灰度图像。
由于噪声、光照等原因还要对图像进行预处理。
本文提出了一种灰度化、二值化、边缘检测、图像滤波的预处理过程。
1.1 灰度化彩色图像包含着大量的颜色信息,不但在存储上开销很大,而且在处理上也会降低系统的执行速度,因此在对图像进行识别等处理中经常将彩色图像转变为灰度图像,以加快处理速度。
由彩色转换为灰度的过程叫做灰度化处理。
选择的标准是经过灰度变换后,像素的动态范围增加,图像的对比度扩展,使图像变得更加清晰、细腻、容易识别。
1.2 二值化二值图像是指整幅图像画面内仅黑、白二值的图像。
在实际的车牌处理系统中,进行图像二值变换的关键是要确定合适的阀值,使得字符与背景能够分割开来,二值变换的结果图像必须要具备良好的保形性,不丢掉有用的形状信息,不会产生额外的空缺等等。
车牌识别系统要求处理的速度高、成本低、信息量大,采用二值图像进行处理,能大大地提高处理效率。
阈值处理的操作过程是先由用户指定或通过算法生成一个阈值,如果图像中某中像素的灰度值小于该阈值,则将该像素的灰度值设置为0或255,否则灰度值设置为255或0。
1. 3 边缘检测两个具有不同灰度值的相邻区域之间总存在边缘,边缘就是灰度值不连续的结果,是图像分割、纹理特征提取和形状特征提取等图像分析的基础。
为了对有意义的边缘点进行分类,与这个点相联系的灰度级必须比在这一点的背景上变换更有效,我们通过门限方法来决定一个值是否有效。
所以,如果一个点的二维一阶导数比指定的门限大,我们就定义图像中的该点是一个边缘点,一组这样的依据事先定好的连接准则相连的边缘点就定义为一条边缘。
经过一阶的导数的边缘检测,所求的一阶导数高于某个阈值,则确定该点为边缘点,这样会导致检测的边缘点太多。
可以通过求梯度局部最大值对应的点,并认定为边缘点,去除非局部最大值,可以检测出精确的边缘。
一阶导数的局部最大值对应二阶导数的零交叉点,这样通过找图像强度的二阶导数的零交叉点就能找到精确边缘点。
1.4 对得到图像作开操作进行滤波数学形态非线性滤波,可以用于抑制噪声,进行特征提取、边缘检测、图像分割等图像处理问题。
腐蚀是一种消除边界点的过程,结果是使目标缩小,孔洞增大,因而可有效的消除孤立噪声点;膨胀是将与目标物体接触的所有背景点合并到物体中的过程,结果是使目标增大,孔洞缩小,可填补目标物体中的空洞,形成连通域。
先腐蚀后膨胀的过程称为开运算,它具有消除细小物体,并在纤细处分离物体和平滑较大物体边界的作用;先膨胀后腐蚀的过程称为闭运算,具有填充物体内细小空洞,连接邻近物体和平滑边界的作用。
对图像做了开运算和闭运算,闭运算可以使图像的轮廓线更为光滑,它通常用来消掉狭窄的间断和长细的鸿沟,消除小的孔洞,并弥补轮廓线中的断裂。
2 车牌定位车牌定位包括上下边界定位与左右边界定位。
经过图像预处理,车牌区域具有相对集中和规则的纹理特征,并具有连续性。
此时.可以根据车牌区域黑白跳变次数先确定车牌的上下边界。
然后根据车牌字符在竖直方向的投影值来确定车牌的左右边界。
2.1 上下边界定位对二值车牌图像进行逐行扫描,利用每一行像素的黑、白跳变规律确定车牌的上下边界。
对二值图像进行逐行扫描,每一行从白变到黑或从黑变到白都记为一次灰度跳变。
扫描行可以表示为f(i),i=1,2,3,…,N 。
令D (i )=f(i)-f(i-1) i=2,3,…,N (1)每一行的跳变次数可以表示为|)1()(||)(|22∑∑==--==i i i f i f i D S (2)具体算法如下:从下向上逐行扫描图像。
对图像的每一行进行从左向右的扫描.如果某行有12个跳变点以上则将其作为牌照的底部。
因为如果某一行通过车牌区域,车牌有7个字符,那么最少的跳变点数应该是14个,左右各一个。
但考虑到样本的清晰程度以及在前述处理过程中车牌信息的丢失,选择12作为跳变点数目的最小值是可行的。
经过大量实验对比也证明这个经验值能取得较好效果。
所以若某一行跳变点数大于12,则认为这一行可能是车牌所在行,继续逐行扫描,直至跳变数小于12。
则将其作为牌照的顶部。
如果未检测到上述条件的结果,重复上述操作,直至检测到目标。
在实际的处理过程中,我们采用的是统计二值化后白点个数的方式进行,这样做更符合样本的实际情况,既减少了孤立噪声对结果的影响。
也不会因车牌信息的丢失而产生误差,同时减小了计算的复杂程度。
实验结果如图7所示为车辆图像经过水平扫描并进行分割的图像。
2.2 左右边界定位经过水平扫描后,确定了车牌区域的上下边界,再经过垂直扫描,确定车牌的左右边界。
垂直扫描的具体算法与车牌水平方向边界定位算法同理。
但为了适应样本获取的随机性,对不同大小、不同拍摄环境所得的样子有很好的适应性,本文放弃了传统的找到一个方向边界后利用车牌宽度近似固定值进行定位的思路,而使用了双向扫描并回溯的定位方法。
从左到右逐列扫描图像,对已完成水平投影分割的图像进行从上到下的扫描,如果某列有6个白点以上则将其作为预选的牌照边界。
为了防止噪声干扰导致的边界定位错误,我们向前进行一个区块的白点统计,因为如果确实是车牌区域,则在相近的接下去的几列中存在大量的车牌信息(白点);如果非车牌区域,则几乎没有或只有几个噪声点,如果白点的统计结果大于一定的阈值.则认为原列所在位置为左边边界。
在后续的测试中我们发现,最终获得的车牌不够完整有部分缺失的现象,分析原因在于,在车牌前述处理过程中造成的边缘信息丢失或不够明显,因此本文使用回溯算法。
首先将边界回溯到与扫描方向相反的距预选边界最近的投影为零的位置。
然后向相反方向逐列扫描。
当扫描后连续若干列投影均为零时则认为已找到最终边界,否则继续回溯。
确定左边界后则开始从右向左逐列扫描,算法相同,方向相反。
这样整个车牌的区域就确定了。
使用此区域对前面的灰度图进行剪取,得到了最终图像。
图9给出车牌定位的最终图像。
3 实验结果采用VC++编程实现车牌定位的过程。