测试软件在汽车性能试验上的应用
HIL测试在新能源汽车试验问题解决中的应用1王涛

HIL测试在新能源汽车试验问题解决中的应用 1王涛发布时间:2021-08-26T09:02:56.222Z 来源:《中国科技人才》2021年第15期作者: 1王涛 2王彦伟[导读] 近年来,随着人们生活水平的提高,汽车需求量逐年增加。
1身份证号码:22242419921011XXXX;2身份证号码: 22028119910713XXXX摘要:近年来,随着人们生活水平的提高,汽车需求量逐年增加。
国家对节能减排的重视,使得新能源汽车的普及率上升,减少了能源消耗,有利于推进我国的可持续发展。
为保证新能源汽车的总体质量,往往应用HIL测试来及时发现新能源汽车中存在的各种问题,这种测试手段能够及时快速地进行汽车故障问题的分析,其测试更为可靠,有利于解决新能源汽车存在的各种问题。
基于此,本文分析了HIL测试在新能源汽车试验问题解决中的有效应用,有利于提升汽车的整体性能。
关键词:新能源汽车;HIL测试;试验问题;应用HIL测试是新能源汽车试验的主要手段,该测试在应用中能够及时根据测试结果来反映汽车中存在的各种设计问题等,经过对测试结果的分析,有关人员可以充分对该汽车试验中的各种问题加以解决,实现相关参数的调整等,提高新能源汽车的安全性。
1.HIL测试系统的总体架构设计以某新能源汽车为例,在应用HIL测试解决汽车试验中出现的问题时,HIL测试系统的总体架构极为复杂。
比如,以测试系统的电控单元为例,其主要包含了发动机电控单元、自动变速器控制单元、车身稳定控制单元、启动控制单元等。
在应用HIL测试系统进行测试与故障解决时,主要包含了对系统功能策略的验证测试、网络通信系统的故障注入与处理测试、系统故障注入测试与诊断测试。
1.1测试系统的硬件组成在对新能源汽车应用HIL测试系统进行测试时,其测试需要对车辆的动力传动系统、底盘控制系统与车身控制系统加以测试,以dsPACE实时仿真系统为基础,建立完善的测试系统平台,在该平台内,主要包含了以下内容:(1)硬件仿真系统,以HIL机柜与测试台架为主;(2)ASM整车模型系统,主要是模型参数化与整车模型;(3)软件控制系统,该系统是主要的控制系统,其中往往包含了测试管理平台与自动化测试平台,在这些平台中,有关的人员可以进行各项测试命令的发出与处理等。
基于LabVIEW虚拟仪器在汽车试验中的应用

汽 车试 验 检 测系统 由传 感 器 、 置 调理 电路 、 前 数
汪立民 : 16 男,9 6年 生 , 总装 汽 车试 验 场 , 程 师 。 工 余永生 : 16 男, 9 2年生 , 装汽 车试 验 场 , 总 高级 工程 师 。
涮
维普资讯
少 应包 含 以下 模 块ቤተ መጻሕፍቲ ባይዱ:
都 属于 这 一类 。下 面 以 HY一 13 据 采 集卡 为例 22数
简 要说 明 C N 的 设计 要 点 。 I a .在 前 面 板 设 置 三 个 输 入 数 据 控 件 和 一 个 图 形控 件 , 字控 件分 别用 来 设 置 数 据 采 集 卡 的 板 基 数
RS 3 / 8 一2 2 4 5在 内的各 种 仪器 通 信 总 线标 准的 所有 功 能 函 数 , 且 具 有 强 大 的 l tn t功 能 , 持 常 用 并 nee 支
件功 能 实现 信 号 数 据 的运 算 、 分析 和 处理 ; 利用 Io / 接 口设备 完 成 信号 的采集 、 量 与调 理 , 而 完 成各 测 从
维普资讯
3 4
技 术纵 横
轻 型汽 车 技术
20() 13 0 2 5 总 5
基 于 L b E 虚拟仪 器在 汽 车试验 中 的应 用 a VI W
汪立民
摘
余 永 生
要
本 文 以汽 车 性 能测 试 系统 为例 , 绍 了虚拟 仪 器 的应 用 , 介 并对 其基 本 原 理 、 电路 设 计 及 软 件设 计 中的 几个 问题 进 行 了介 绍 和探 讨 。
2 0 ( ) 1 3 轻 型汽 车技 术 025总 5
汽车动力性试验仿真matlab

汽车动⼒性试验仿真matlab基于matlab 的⼀款轻型货车动⼒性试验仿真段##(武汉理⼯⼤学汽车学院,汽车##班;1049####)摘要:利⽤⼀款轻型货车发动机外特性的转矩拟合曲线及整车的其他配置参数建⽴了整车的动⼒学模型,在matlab 环境下⽤m 语⾔完成了仿真过程。
动⼒性是汽车的最基本性能,是汽车整车性能道路试验的必备项⽬之⼀,但道路试验需要较好的试验场地和有经验的试验⼈员,过程也很繁琐。
但若利⽤发动机及整车的参数建⽴数学模型,在软件中进⾏试验仿真则会⽅便很多。
设计合理的数学模型及⾼效的仿真程序,能得出接近真实试验的结果,为⼯作⼈员提供了重要参考,有很强的实⽤性。
关键词:汽车;动⼒性;试验仿真;matlab ;m 语⾔;实⽤性1 汽车动⼒性试验的基本内容汽车动⼒性评价指标有最⾼车速、加速时间、最⼤爬坡度等,与之对应的试验内容有最⾼车速的测试、汽车起步连续换挡加速时间与超车加速时间的测试和汽车最⼤爬坡度的测试。
另外,按照我国标准,动⼒性评价试验均在满载情况下进⾏。
1.1 最⾼车速汽车的最⾼车速是指汽车标准满载状态,在⽔平良好的路⾯(清洁、⼲燥、平坦的混凝⼟或沥青路⾯,纵向坡度在0.1%以内)上所能达到的最⾼⾏驶速度。
1.2 加速时间常⽤原地起步加速时间与超车加速时间来表明汽车的加速能⼒。
原地起步加速时间是指汽车由Ⅰ挡或Ⅱ挡起步,并以最⼤的加速度(包括选择最恰当的换挡时间)逐步换⾄最⾼挡到某⼀预定的距离或车速所需的时间。
⼀般常⽤0—100km/h 所需的时间来表明原地起步的加速能⼒。
超车加速是指⽤最⾼挡或次⾼挡有某⼀较低车速全⼒加速⾄某⼀⾼速所需的时间。
对超车加速能⼒还没有⼀致的规定,采⽤较多的是⽤最⾼挡或次⾼挡由30km/h 或40km/h 全⼒加速⾄某⼀⾼速所需的时间。
本⽂所取模型为⼀款轻型货车,动⼒性⼀般,再结合⽣活使⽤实际需要,现⽤40km/h 全⼒加速⾄70km/h 所⽤的时间来评价汽车的加速性能,因为此速度区间是城市道路在较佳的通车情况下加速时的常⽤⼯况。
VBOX汽车整车性能测试系统
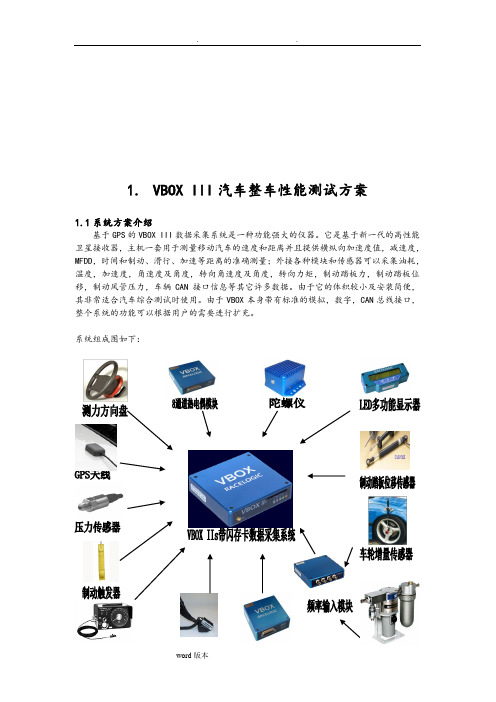
1.VBOX III汽车整车性能测试方案1.1 系统方案介绍基于GPS的VBOX III数据采集系统是一种功能强大的仪器。
它是基于新一代的高性能卫星接收器,主机一套用于测量移动汽车的速度和距离并且提供横纵向加速度值,减速度,MFDD,时间和制动、滑行、加速等距离的准确测量;外接各种模块和传感器可以采集油耗,温度,加速度,角速度及角度,转向角速度及角度,转向力矩,制动踏板力,制动踏板位移,制动风管压力,车辆CAN接口信息等其它许多数据。
由于它的体积较小及安装简便,其非常适合汽车综合测试时使用。
由于VBOX本身带有标准的模拟,数字,CAN总线接口,整个系统的功能可以根据用户的需要进行扩充。
系统组成图如下:以上第二——十九项为可选项1.3特点:•全套测量系统体积极小,安装简便迅速•能完成国家标准要求的汽车动力性,经济性,操纵稳定性,制动性能等实验•在线显示4个测量参数•各种测量或采集到的参数可以实时显示•可根据要求设定各种不同的试验条件进行试验•制动触发形式多样,使试验更加方便•WINDOWS操作界面的设定和分析软件,使用方便•高精度、高可靠性,高耐振、抗冲击性能确保测试质量•用GPS非接触式速度和距离测量•现场即时打印功能,打印各个测量或采集到的参数,实现现场数据阅读•大容量紧凑式闪存卡(CF卡)即时存储数据,以便后处理•可扩展连接其他各种传感器•绘制轨迹图,圈数定时1.4 可进行的试验:•滑行试验•油耗试验•爬陡坡试验•最高车速试验•加速性能试验•制动性能试验•操纵稳定性试验•最小稳定车速试验•最小转弯直径测量实验•制动踏板力测量实验•制动踏板行程测量实验•制动管路压力测量实验•汽车防抱制动系统性能实验•温度测量实验•里程,速度表校验等其它试验1.5 可满足的国家标准:GB/T 12545 - 1990 汽车燃料消耗量GB/T 12547 - 1990 最低稳定车速GB/T 12536 - 1990 汽车滑行试验GB/T 12543 - 1990 汽车加速性能GB/T 12539 - 1990 汽车爬坡性能GB/T 12544 - 1990 汽车最高车速GB/T 12676 - 1999 汽车制动系统性能GB/T 6323 - 94 汽车操纵稳定性试验方法GB/T 12540 - 90 汽车最小转弯直径测定方法GB/T 13594 - 92 汽车防抱制动系统性能要求和试验方法1.6 应用实例图片:VBOX II在测试世界(芬兰)的应用:2. 关于Racelogic 公司VBOX产品概述GPS 技术在1995年就已经面世但是知道最近才足够精确用于车辆测试(见GPS的概述)。
几种汽车NVH试验方法研究

几种汽车NVH试验方法研究一、本文概述随着汽车工业的迅速发展,消费者对汽车的要求已经不仅仅局限于外观、性能和价格等传统因素,汽车的乘坐舒适性和静谧性(NVH,即Noise、Vibration、Harshness)日益受到重视。
NVH性能是衡量汽车质量的重要指标之一,它直接关联到驾驶者和乘客的乘坐体验。
因此,研究和发展有效的汽车NVH试验方法,对于提升汽车品质和满足消费者需求具有重要意义。
本文旨在对几种常见的汽车NVH试验方法进行研究,分析各方法的优缺点,探讨其在汽车NVH性能评估中的应用。
我们将介绍NVH的基本概念和评估标准,明确试验的目的和重要性。
接着,我们将重点介绍几种常用的NVH试验方法,包括噪声测试、振动测试和冲击测试等,并分析这些方法的原理、操作步骤以及需要注意的事项。
本文还将探讨如何选择合适的试验方法,以提高试验的准确性和效率。
通过本文的研究,我们希望能够为汽车工程师和研发人员提供有益的参考,推动汽车NVH试验方法的不断改进和优化,为汽车工业的可持续发展做出贡献。
二、NVH试验方法的分类与特点NVH(Noise, Vibration, Harshness)试验是评估汽车乘坐舒适性和产品质量的重要手段。
根据不同的试验目的和测试环境,NVH试验方法可以分为多种类型,每种类型都有其独特的特点和应用场景。
道路试验是最直接反映车辆实际运行状况的NVH测试方法。
通过在真实道路环境中驾驶车辆,可以获取到最接近实际使用情况的噪声、振动和冲击数据。
这种方法的优点是结果真实可靠,能够反映车辆在各种路况和速度下的NVH性能。
然而,道路试验的成本较高,且受天气、路况等外部因素影响较大。
实验室试验通常在室内进行,可以控制试验条件,减少外部干扰。
常见的实验室试验包括:半消声室试验:在半消声室中模拟车辆运行环境,通过调整声源和反射面,可以精确测量车辆的噪声水平。
这种方法的优点是测量精度高,可以排除外部噪声的干扰。
基于Delphi的数据采集在汽车制动性能测试中的应用

( 大学仪器科学 与工程学 院, 东南 江苏 南京 2 0 9 ) 10 6
摘
要 : 据 汽 车道 路 试 验 的 需要 。 发 了基 于 D lh 的 数 据 采 集 处 理 系统 。该 系统 通 过 R 一 3 根 开 e i p S 2 2串行 接 口 实现
K yw rs a t o i ;rk e o ac ; r s o u iao ; l- ra ;Q l r g e od :uo bl bae r r ne si mm nctn mutt ed S Lft n m e pfm e ec i ih ie i
汽车 的 制动 性 能关 系到 行 车安 全 性 , 一 项 重 是 要 的性 能 指标 。评价 一辆 汽 车 的制动 性能 最基 本 的
位机 的串行通信 ,对汽车运动参数实 时采集和监
控 。在试 验 完成 之后 对其 进行 滤 波分析 处 理最后 生
指标是制动加速度 、 制动距 离 、 制动 时间及 制动时 方向的稳定性。 因此汽车运动参数( 如车速 、 踏板力 、 车轮转速 、 向盘转角等) 方 h c e l e e lt c u st n a d s p r iin o e mo in p r mee fv h c e a d d t c u s in ma h n , i h r a i sr a - me a q ii o n u e so ft t a a tr o e il n aa t z i i v h o s
动态性 能 的分 析 、 动 系统 的性 能 匹配 和 A S的开 制 B 发有 着重 要 的意义 和应 用价 值 。
成报表 。 以便于技术工程人员对特定测试 目 的分 标
MMA7260Q在汽车制动性能检测中的应用
图 4 制 动 检 测 系统 硬 件 结 构 图
D输 入 通 道 即 可 把 M 7 6 Q 与 L C 1 2连 接 。 连 接 如 MA 2 0 P 23
图 3所 示 。
开 始 开 定 时 器
加速度
— — — — —
_ .
测 定传感 器 与水平面 的夹 角 ( 方 向与Y 向) x 方
、
MMA72 60
Q 加速 度功能模块简 图
其 中两 边使 用 MMA7260 Q 三 轴 低 重 力 加
,
速 度 传感 器 检测 汽 车制 动 过 程 的负加 速 度
械结构
,
可 以简化成 图 2 模 型
,
,
的 L P C2 13 2 为 控 制 器 对 制 动 过 程 中 的 数 据 进 行 计 算 偿
。
因此 有
一
定
的局 限性
道路试验法 的主要 仪器 为 五 轮
、
仪
,
但其价格 昂贵
操作 复杂
因此
,
,
目前 多 用
于 专业 汽 车制造 厂
。
基 于 汽 车后 市
场 的 随 车式 制 动性 能 检 测 对 提 高 汽 车 的使 用安 全 性具 有 重 要 意义
,
有 广泛 的应 用 空
图 1
以 A R M 内核
用A D测纵 、横 两 个方 向上的加速度
LP C21 2 3
3制 动测 试 器 的 硬 件 系统
制 动 测 试 器 除 了 已 介 绍 的 加 速 度 传 感 器 MMA 2 0 7 6Q
外 , 还 应 用 了 单 片 机 L C 1 2和 1 8 6 点 阵 的 液 晶 显 P 23 2x4
基于GT-SUITE的乘用车驾驶性仿真与应用
2020年(第42卷)第9期汽 车 工 程AutomotiveEngineering2020(Vol.42)No.9doi:10.19562/j.chinasae.qcgc.2020.09.003基于GT SUITE的乘用车驾驶性仿真与应用新能源汽车重点专项国六排放标准技术体系研究项目(2007CB210003)资助。
原稿收到日期为2019年9月16日,修改稿收到日期为2019年11月29日。
通信作者:曾浩,工程师,E mail:zenghao3@changan.com.cn。
曾 浩,郑广勇,张彩霞,孔 薇(重庆长安汽车股份有限公司动力研究院,重庆 401133)[摘要] 为了在整车性能开发早期对驾驶性进行评价,本文中使用GT SUITE软件,考虑发动机瞬态响应和转矩控制策略,建立乘用车驾驶性仿真模型。
利用仿真模型对部分典型的驾驶性工况进行仿真计算,并通过试验数据校正模型,确保仿真误差在10%以内。
以某6速自动挡汽油车为例,针对3种驾驶模式的不同需求,分别对油门特性和换挡规律进行虚拟标定。
最后对虚拟标定结果进行试验验证,仿真与试验误差在8%以内,充分验证了驾驶性虚拟标定的有效性和实用性。
关键词:驾驶性;瞬态响应;转矩控制策略;虚拟标定;GT SUITESimulationandApplicationofPassengerVehicleDrivabilityBasedonGT SUITESoftwareZengHao,ZhengGuangyong,ZhangCaixia&KongWeiPowerResearchInstitute,ChongqingChanganAutomobileCo.,Ltd.,Chongqing 401133[Abstract] Inordertoevaluatethedrivabilityintheearlystageofvehicleperformancedevelopment,GT SUITEsoftwareisusedinthispapertoestablishthepassengervehicledrivabilitysimulationmodelwithconsidera tionoftheenginetransientresponseandtorquecontrolstrategy.Thesimulationmodelisusedtosimulatesometypi caldrivingconditions,andthemodeliscorrectedbytestdatatoensurethatthesimulationerroriswithin10%.Tak inga6 gearautomatictransmissiongasolinevehicleasanexample,accordingtothedifferentrequirementsofthreedrivingmodes,thethrottlecharacteristicsandtheshiftingschedulearecalibratedvirtuallyrespectively.Finally,thevirtualcalibrationresultsareverifiedbyexperiments,andtheerrorbetweenthesimulationandtestiswithin8%,whichfullyverifiestheeffectivenessandpracticabilityofthevirtualcalibrationofdrivability.Keywords:drivability;transientresponse;torquecontrolstrategy;virtualcalibration;GT SUITE前言全负荷动力性、经济性和驾驶性为评价汽车纵向动力学性能的3个重要指标。
车辆模拟试验技术在新能源汽车研发中的应用
车辆模拟试验技术在新能源汽车研发中的应用随着新能源汽车的发展,汽车行业中的技术研发也在不断推进,其中,车辆模拟试验技术在新能源汽车研发过程中的应用越来越广泛。
本文将从模拟试验的概念、技术特点、应用场景以及未来趋势等方面进行探讨,为读者深入了解车辆模拟试验技术在新能源汽车研发中的重要性与应用提供参考。
1. 模拟试验技术的概念车辆模拟试验技术,指的是通过模拟真实路况与各种复杂工况,在实验室中进行车辆测试,通过各种测试数据集成车辆可靠性、安全性、舒适性等多重指标的测试技术。
目前车辆模拟试验主要分为三类:基于虚拟仿真环境的仿真试验、基于硬件环境和仿真试验相结合的试验和纯硬件试验。
2. 模拟试验技术的技术特点车辆模拟试验技术具有高效、低成本、重现性好、安全性高等诸多优点。
不仅可以节约实际测试成本,同时可以提高测试的安全性和效率。
在新能源汽车中,车辆模拟试验技术可以检测电动车辆的电池循环寿命、电机效率等重要参数,也可以验证车辆的底盘结构设计是否合理,同时能够测试车辆在不同工况下的能耗情况。
3. 模拟试验技术的应用场景车辆模拟试验技术的应用场景十分广泛。
其中,在新能源汽车研发过程中,车辆模拟试验主要应用于车身结构、车辆底盘、动力系统、电池等方面的研究。
例如,模拟试验可以用于检测新能源汽车电池循环寿命、电池温度管理系统的设计是否合理、行驶过程中能耗情况的评估等。
车辆模拟试验还可以帮助开发新的电机控制策略,改善电动车辆的整车性能和驾驶体验,为新能源汽车增强竞争力。
4. 模拟试验技术的未来趋势随着技术的发展,车辆模拟试验技术将越来越智能化、自动化和模型化。
随着数据分析与机器学习等技术的广泛应用,大量收集的数据可以为模拟试验提供更多的参考信息,同时可以根据数据集的特点自动调整测试参数。
未来,车辆模拟试验技术将与智能网联等技术相结合,为新能源汽车的开发提供更多的支持,为车辆安全、环保等追求更高的目标提供更强有力的技术保障。
制动集成检测系统在整车道路试验中的应用
3 王 德 杉 谢 进 荣 . 车 半 挂 列 车 转 向特 性 的研 究 . 车 技 汽 汽 术 ,9 8, 9 2) 3  ̄ 5 1 8 1 ( :6 4 .
4 C e a d T mi k h n C.n o z a M.L tr l o to f Co u ae a C n r l o mme ca ril
i e r td d tct n s se whc o is s t r e u e s n or a l ip a e nts ns r c e e ain s ns r pr s u e ntg ae ee i y t m ih c mpr e he mo o pl e s  ̄c b e ds l c me e o ,a c l r t e o y e s r o o
整 车 制动性 能道路 试验 是基 于实 际 车载试 验环 境 .通 过各 种车 载测试 设备 来 获取整 车在 实 际路 面 工 况下 的制 动性 能参数 . 真实 、 可 客观 地反 映制 动系 统 的可靠 性 和整车 的动 态稳 定性 制 动集成 检测 系
生产 企业 的底 盘配 套研 发提 供实 际道路 工况 下 的制
感器 、 接 触 式 测 速仪 及 数 据 采 集 系 统 组 成 的 制 动 集 成 检 测 系统 对 其 进 行 了整 车道 路 试 验 , 与 虚 拟 仿 真 试 验 进 行 非 并
验证 对 比 该 检测 系统 在 试 验 过 程 中实 时 接 收各 传 感 器 输 入 的制 动 性 能 物 理 量参 数 。根 据试 验结 果 , 对该 乘 用 车 的
比
前 进挡
倒 挡
35 3 06 2 .3 - . 4
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
鼍,当卫喾鎏—_田
V-BOXlll完争箍容E流的外部功能扩展模块包括多功能娃示嚣模块.数#信 号输A模址ADC03.温度模块代8,颧丰输^模块HM02和偏航传感器
1 3
g月性%
操竹羿面有汉化版本,格式清晰、软件生装后占Ⅲ内存小,运打速度快。通过 RS232端¨直接连接到笔记奉电呐.时时观测数据
22数据导^
|巍I壤
臻
,
5赴D幽乜竺型丛塑—里!堕苎!——旦堕
艮c“㈨me‰w…w}Ⅷ
L蛀“㈨m“t…m…+”
L强t[¨dtakc…‘州InB(x)
如图2,点一*“LoadMl’导^某摊稳试验轻恒性数据舁丽:包禽山砸转角车速 的曲线以硅右F角的车辆行驶轨迹“馋I还乜S旗它采集的放据.nf擞据酞验项 目十同删出需要的参数。
日南省汽丰i《学鲁第tⅢ科*学术研讨舍砖i集
HNSAEl0051
V-boxlll测试软件任汽车性能试验上的应用
狰本斋
海马(郑州)汽丰有m岱目 【摘;】v BOXIIIⅫE##£一#基fGPS镕号冒勺a*采集^‰.I要目月f—t{*&tn t4m&Ⅱ兼容Br
撞作目^各^垫丰r}#Ⅻn*都tr*R目. 【关键自】V—BOXII[^{
行仿真分析,验证理论分析的止确性,对4WS技术的推广应用具有蘑要意义。 1动力学模型
由二自由度汽车模型理论,可把汽车简化为一个两轮的单
轨牟=辆模删,假定汽车以一定车速做平行于地面的平面运动。此 外,为保障轮胎侧偏特性处于线性范阡习内,汽车的侧向加速度应 不大于0.49。4WS汽车单轨动力模型如图l所示。
Stability
of Four-wheel Steering Vehicle Simulation Study
Zhao Feng.Liu Chaofan
HAIMA(ZHENGZHOU)AUTOMOBILE CO..L1D.450016 Abstract:4WS vehicle dynamics model of single—track is built,simulate analysis using the Matlab/Simulink software and compare with FWS vehicle.The results show that,the steady—state He of FWS vehicle deviates from the zero position,
冬故
由上图建立如下动力学方程:{!:+:’:m'.(1)
I1
一_冬救 \穴孓谢≥” ≯矿、,\/-、、谢dr毒
/
ityl--121。y2=l(1)
式中,F小Fv2分别为前后轮的侧向力,m为汽车质量,巩为汽 车侧向加速度,l。、l:分别为前后轴到质心距离,l为汽车横摆力距,OJ为汽车横摆角速度。 由于轮胎侧偏特性处于线性范围内,设CI'、C:分别为两前轮、两后轮侧偏刚度之和,C,、C:取负值。由于转向角8。、8:和侧偏 角al、a2都较小,取COS6 l-l,COS8 2=1,tanotl=仅I,tanot 2.一-of.2,可得如下方程:
4软件测试的发展
随着整个汽车行业的快速发展,试验方法及手段也在不断进步,V—BOXIII测试软件及它附带的硬件系统,较之以前有很大 的提高。同行业也有其它的测试软件,但原理相通,都是随着行业的进步而进步。
作者简介
徐本斋,男,海马(郑州)汽车有限公司从事试制试验工作。E-mail:xubz@haima.corn
前言
作为一种新的四轮转向机构(4WS),从机构分析和^i辆转向运动的角度看,对比普通前轮转向(FWS)汽车,其转向原理存在很
大差异。,理论』二,汽’:低速行驶时,4WS可有效减小汽车的转弯半径,增加汽车转弯灵活;高速行驶时,可改善汽车在横摆角速度
和侧向加速度等瞬态响心指标,进而改善汽车的行驶稳定性…。本文基于二自由度单轨乍辆模型,应用Matlab/Simulink软件进
{
u
(3) ~
I(Lc,+12c2)13+_11
12。c。一《c:)∞_llc。8。.1:c:8:=I由
113・
引盲
BOXIII代表丁Rar-elogic公一l的帮2代(:Ps散据采集器它使用了强人的新 的GPS引擎,能“lOOHz lE录cPs袖其他数据信息.技记采的数据^接存储在叫存
V
卡中“便于传输给州机:
v
BOX]II增加了4十高分辨率的模拟量辅^通道柬lE采外部传感器数据和两
个CAN总线接口“允许叶在第一条总线}传辅GPS数曲}的时候刚时连接
2戟件处4数据 21数据■¥设J
目2*^*l∞≈《
通道数据的记采功能可“打开或戈闭也uT“改变每个输A通道的名称,配置 比倒和偏置值U桂枝传感器I的刻膳髓和0的偏移值々造个通道汝取的直流电雎 旋 zt应,这就矗圻这个通道仔储在川寸卡巾帕值也是电捱值‘1使』l』柳如载持 币元这样的传感器的时候.可能希单以№为雎伸存储数掘扎这种情况F更改为 适台丁传感推的剿鹰和偏移值可“让叫_卡以Kg h单位存储数据如蹦J所示
zero
the traditional and
FWS vehicle is the same direction with the m)nt wheel angle.But the steady—state centroid sideslip angle value of4WS vehicle achieves rapidly.4WS vehicle
刻裙水存报告生扁}器的辟格之中 3软件耐试的主¥试鞋项目
a动力性能:加速性、最高车速、最太爬坡度。 b经济性能等速殛限定工况燃油消耗世。
河南省汽车工程学会第七届科研学术研讨会论文集 c.制动性能:0型、1型、失效、ABS.
d.操纵稳定性能:稳态、阶跃、回正、轻便性等。 e.根据配备的附件设备还可以做更多的试验项目,如平顺性等。
图1
4WS汽车单轨动力模型
Fyl=c。a。=cl(爿苎_81)
Fy2-c2仪:=c2(爿苎-82)
av21J+u∞
口’
式中:1J一汽车质心侧向速度;u一汽车前进速度。 当汽车转角较小时,汽车质心侧偏角B=1,/u,可得如下微分方程: 1(Cl+c2)B+』一(1lcl-12c9‘1)一cl
8 l--C28 2=m(心+u‘I))
HNSAEl0052四轮转向汽车行驶稳定性仿真研究
赵丰刘超凡
海马(郑州)汽车有限公司450016
【摘要】 建立4WS汽车单轨动力学模型,利用Madab/Simulink软件进行仿真分析,并与传统FWS汽车进行对比。结果表 明.FWS汽车质心侧偏角的稳态值偏离零位置,且与前轮转角方向一致,而4WS汽车质心侧偏角稳态值迅速达到零。4WS汽车 的稳态幅值和响应时间均优于FWS汽车.行驶稳定性高。 【关键词】汽车 四轮转向, 行驶稳定性仿真
x*《% V—BOX Ill Test
8
Soflw眦in Aut砌ohile
Xu
PeHo…on
450016
T∞b
Bethm
LTD
Abmraet:V-BOXflll^l
I∞I strong
q】n…15 aGPS 51日3l based nnthedah
Hmma(ZhenFhou}Aulom山lleC0
2 3数据蝙辑
!受璧!兰!!!
nfH通过斟3页面T具栏中的‘Edit r)。ia’圈杯中越褂一站躺本的编自}命令米删
除vh文件中的某一酃分,击掉尤蛳撇据,然后另存.可眦存勾Excel或足VIⅢx
∞种格式, 2.4数据赴m
使,”撤告生成器进朴后处理.如图4的界卣进行升始结束条件的蹬置荦击 ‘%an’图标启动软件,让软件处理寻找b每个测试棚Ⅱ配的文戗.榆盎的结粜台立
Rw
c
hJ日r的输^模块, 1软件的基本特点 1’Ⅲ月性强
v—BOXIII
iiJ“由很多电源设备供电.包括1辆贯茄连接嚣,配套提Ⅱ啪N卜-Mh
电池包和电瓶,最^的J n电爪输^不能超过3flV,否则会导致损坏VBOX。石1日的 数据秉集模块通过CAN线连接时,CAN线奉身就可“供电,无需在单让琏接电源。
acquisition syslem
commonality eompafibilily‘%v ope ration,me r1叫or domrsti(0emsandm¥pR“f,n V BOX l『[,Automotive PeffomaneeI%1 Key words
ag…帆widely
I¨main applit atianln aulomolfik perlommnce used
are
steady—state value stability. Key
better than FWS vehicle in amplitude value and steady—state response time,with hiigh driving
WOrds:Vchicle,4WS,Driving stability,Simulation