第二章 点云阶段基本概念与常用命令讲解
《点云库PCL学习教程》第2章PCL入门

《点云库PCL学习教程》第2章PCL入门PCL(点云库,Point Cloud Library)是一个用于点云数据处理的开源软件库。
它提供了一系列的算法和工具,用于处理、过滤、匹配和可视化点云数据。
本教程将介绍如何入门PCL,包括安装PCL、加载点云数据、基本的点云操作等。
第二步是加载点云数据。
PCL支持多种点云数据格式,包括PLY、PCD 等。
可以使用PCL提供的函数来加载点云数据。
例如,可以使用pcl::io::loadPLYFile函数加载PLY格式的点云数据。
加载完成后,可以对点云数据进行操作和处理。
第三步是基本的点云操作。
PCL提供了一系列的点云操作函数,用于对点云数据进行滤波、分割、配准等操作。
例如,可以使用pcl::PointCloud类的成员函数来获取点云的大小、坐标等信息。
还可以使用pcl::VoxelGrid类来进行点云的体素化,将点云数据通过网格化操作来降采样。
第四步是点云可视化。
PCL提供了基于OpenGL的可视化工具,可以将点云数据可视化为3D场景。
可以使用pcl::visualization::PCLVisualizer类来创建一个可视化对象,然后将点云数据添加到可视化对象中。
可以通过设置可视化对象的参数来调整点云的显示效果,例如点的大小、颜色、透明度等。
在使用PCL的过程中,还可以进行更高级的点云处理,例如点云的配准、特征提取等。
PCL提供了一系列的算法和工具,用于实现这些功能。
可以通过查阅PCL的文档和示例代码来学习和使用这些功能。
总结一下,PCL是一个强大的点云处理库,可以用于加载、操作和可视化点云数据。
本教程介绍了如何入门PCL,包括安装PCL、加载点云数据、基本的点云操作和点云可视化等。
希望这篇教程能够帮助初学者快速入门PCL,并掌握基本的点云处理技术。
点云的滤波与分类-概述说明以及解释
点云的滤波与分类-概述说明以及解释1.引言1.1 概述概述部分是文章的开篇,旨在介绍点云的滤波与分类的主题,并提供背景信息。
在此部分,我们将简要介绍点云的定义和应用领域,并概述点云滤波与分类在计算机视觉和机器学习方面的重要性。
点云是由大量的三维点组成的数据集合,可以被视为真实世界中对象的数字表示。
点云数据广泛应用于计算机视觉、三维建模、机器人感知、自动驾驶等领域。
通过激光扫描或摄影测量等手段,我们可以获取物体表面上的各个点的三维坐标信息,并将其存储为点云数据。
这些点可以呈现出物体的形状、表面细节和空间关系,为后续的分析和处理提供了基础。
然而,由于数据获取过程中存在噪声、不完整数据和离群点等问题,点云数据可能会包含大量的无效信息或错误信息。
为了准确地分析和处理点云数据,我们需要对其进行滤波和分类操作。
点云滤波是指在点云数据中去除噪声、平滑表面、填补缺失等处理过程。
通过滤波,我们可以提高点云数据的质量和准确性,以便后续的分析和应用。
目前,点云滤波的方法和技术有很多种,包括基于统计学的滤波、基于形态学的滤波、基于深度学习的滤波等。
点云分类是指将点云数据按照不同的类别或标签进行分组。
通过点云分类,我们可以实现物体识别、目标检测、场景分析等任务。
点云分类方法包括基于几何特征的分类、基于颜色特征的分类、基于深度学习的分类等。
分类结果可以帮助我们更好地理解和处理点云数据。
本文将重点介绍点云的滤波和分类方法与技术。
我们首先将介绍点云的基本概念,包括点云数据的结构和表示方式。
接着,我们将详细讨论点云滤波的方法与技术,包括各种滤波算法的原理和应用场景。
然后,我们将探讨点云分类的方法与应用,包括几何特征和深度学习在点云分类中的应用。
最后,我们将对本文进行总结,并展望未来点云滤波与分类研究的发展方向。
通过本文的阅读,读者将能够全面了解点云滤波和分类的基本概念、方法和应用,对点云数据的处理和分析有更深入的认识。
同时,我们也希望本文能够促进相关领域的研究和应用,推动点云滤波与分类技术的发展。
GeomagicStudio教学教程
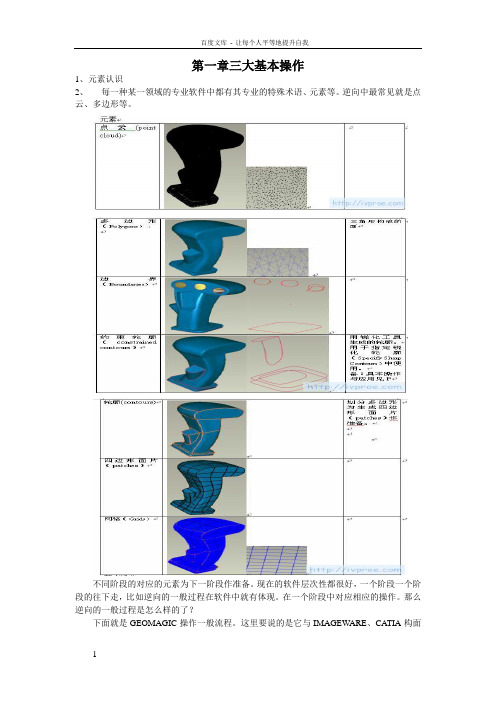
第一章三大基本操作1、元素认识2、每一种某一领域的专业软件中都有其专业的特殊术语、元素等。
逆向中最常见就是点云、多边形等。
不同阶段的对应的元素为下一阶段作准备。
现在的软件层次性都很好,一个阶段一个阶段的往下走,比如逆向的一般过程在软件中就有体现。
在一个阶段中对应相应的操作。
那么逆向的一般过程是怎么样的了?下面就是GEOMAGIC操作一般流程。
这里要说的是它与IMAGEWARE、CA TIA构面过程有所不同GEOMAGIC一般为检测(轮廓)----PATCH----GRIDS----SURIMAGEW ARE、CA TIA一般为从点云提取线再铺面与我们常规的曲面操作有所相同,不同的时它生成面的命令有点作为参照。
GEOMAGIC这种生成曲面的过程个人认为如果是简单的模型还可以比较顺,但如是较复杂的模型那就需要耐心了。
看了上面的介绍,不知大家有没有一个大概的认识。
如果没有我们先不管接下来往下看,结合例子,再回头看一下,学完全书再看一看以前不懂的。
下面我们讲基本的一些操作,如果你用过AUTOCAD,PROE,UG等任一个类似的软件你就会发现在操作中我们打交道最多为视图操作、选择操作、管理面板操作还有就是命令了。
先看一看管理面板操作下面是视图操作再接下来为选择操作三大基本操作讲完了。
下面是操作实例讲解与例子文档实例演练Demo Head - Point Cloud.ASC第二章点云阶段希望通过系统的讲解,大家能对GEOMAGICS有个基本的认识,会基本的操作!二、常用命令与操作最后就是Wrap (裹覆)后,帮助里这样写到想象成把一将塑料薄膜裹在点云上,这时就能大概看出是个什么样的形状,就有这一步就可以进入到下一步,也是流程中比较重要的一个阶段,即多边形阶段!第三章拼接与合并的命令讲解点云的拼齐(拼接与对齐)(Registration)与合并(Merge),对Registration我是这么理解的,很多扫描仪自带的软件中都有这一项,且也叫Registration,我听他们培训时叫注册,当然也不错,字典中就有这么一个常见意思。
点云离群点的概念-概述说明以及解释
点云离群点的概念-概述说明以及解释1.引言文章1.1 概述部分的内容主要是对整篇文章的主题进行概括和解释,并简要介绍点云离群点的概念和与之相关的重要性。
概述:点云是一种用于描述三维物体的数据形式,它由大量的离散点组成,每个点都有自己的坐标信息和属性值。
随着三维数据获取技术的快速发展,点云已广泛应用于各个领域,如计算机图形学、机器人、虚拟现实和三维重建等。
在点云中,离群点是指与周围点具有明显差异的点,它们可能是由于传感器噪声、数据采集错误或实际场景中的异常对象所导致。
因此,准确地检测和识别离群点对于点云数据的后续处理和分析具有重要意义。
随着近年来点云数据的规模不断增大,以及点云在各个领域的广泛应用,离群点的检测和识别变得越来越重要。
通过识别离群点,我们可以过滤掉异常点的影响,提高点云数据的质量和准确性。
对于三维重建和模型生成任务来说,正确处理离群点可以减少噪声干扰,提高模型的精度和可视化效果。
在机器人领域,离群点的检测可以用于环境感知和导航,帮助机器人实现更加智能和安全的行动。
此外,离群点的识别还可以应用于异常检测和物体识别等任务中。
因此,本文旨在介绍点云离群点的概念和意义,并对当前的研究进展进行综述。
首先,本文将详细介绍点云的定义和应用,包括点云数据的获取方式和常见的点云表示方法。
接着,将重点讨论离群点的概念和意义,包括离群点的定义、分类和检测方法。
最后,对已有的研究成果进行总结和展望,探讨未来点云离群点检测的研究方向和应用前景。
通过本文的阐述和讨论,读者将能够深入了解点云离群点的概念和重要性,并对该领域的研究现状和未来发展有一个全面的认识。
1.2文章结构文章结构部分的内容可以从以下几个方面进行描述:1. 介绍章节目录及标题:在文章结构部分,首先可以简要介绍文章的章节目录及各个章节的标题。
这样可以帮助读者更好地理解全文的组织框架。
2. 每个章节的主要内容概述:对每个章节的主要内容进行简要概述,提供一个总览,让读者对全文有一个大致的了解。
点云
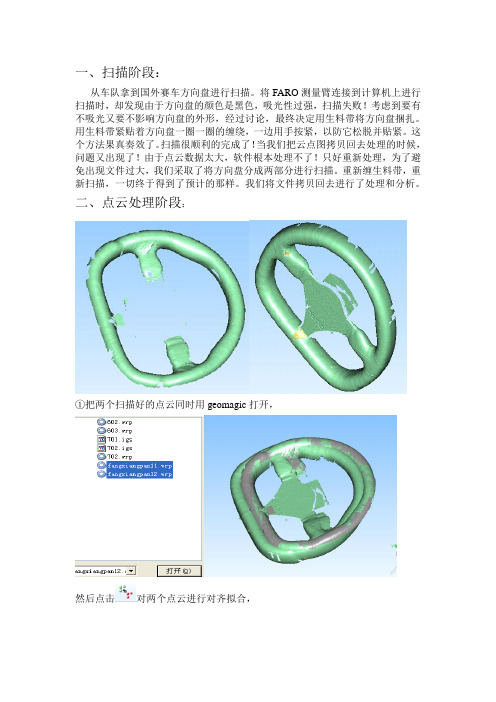
一、扫描阶段:从车队拿到国外赛车方向盘进行扫描。
将FARO测量臂连接到计算机上进行扫描时,却发现由于方向盘的颜色是黑色,吸光性过强,扫描失败!考虑到要有不吸光又要不影响方向盘的外形,经过讨论,最终决定用生料带将方向盘捆扎。
用生料带紧贴着方向盘一圈一圈的缠绕,一边用手按紧,以防它松脱并贴紧。
这个方法果真奏效了。
扫描很顺利的完成了!当我们把云点图拷贝回去处理的时候,问题又出现了!由于点云数据太大,软件根本处理不了!只好重新处理,为了避免出现文件过大,我们采取了将方向盘分成两部分进行扫描。
重新缠生料带,重新扫描,一切终于得到了预计的那样。
我们将文件拷贝回去进行了处理和分析。
二、点云处理阶段:①把两个扫描好的点云同时用geomagic打开,然后点击对两个点云进行对齐拟合,接着就是点击对拟合完成的点云进行全局注册,然后对重合、覆盖的部分进行删除,依次点击对点云进行删除非法连接与体外孤点,去除噪声,统一采样,最后进行合并,这样点云处理就结束了,进入到多边形处理的阶段。
多边形阶段:首先,点击对方向盘中多边形数量的控制。
方向盘中存在较多的缺陷处,点击对存在孔的地方进行孔的填充,填充完之后,点击网格医生对多边形做处理,完成对一些相交区域的删除和对特殊特征的处理,得到由于表面还存在凹凸不平的地方,鼠标选中要处理的地方,点击对其进行去除特征,处理完,光顺之后,对多边形进行分析,然后在进行休整得到可以接受的图形,点击,点击确定,然后软件进入处理计算阶段,一段时间后,得到多边形处理完成,进入到曲面处理阶段。
三、曲面处理阶段:利用测量臂得到的数据用Geomagic Studio 软件处理后得到一个IGS文件,在UG软件打开,打开IGS文件得到一个网格模型,因为得到的文件很大,就将整个图框全选导出部件并移除所有参数由此我们得到了一个方向盘的片体模型将模型改成着色并对所有片体进行缝合,在三岔板上建立一个基准平面轮廓线,并将轮廓线投影到基准平面上是轮廓,然后拉伸并对中间部分进行切割最后得到一个中间空心的方向盘利用刚刚轮廓线的投影,结合样条曲线将该曲线修整,将修整后的曲线连接成封闭的曲线并拉伸得到所需的大致形状,对拉伸所得的实体抽取边缘曲线对得到的曲线进行处理,将弯曲较大的曲线用直线代替,并且对曲线进行桥接到曲面,接着是对中间面板进行修补,采用通过曲线网格对其进行修补由此得到我们所需的方向盘。
第二章点云阶段基本概念与常用命令讲解
没有 光滑 时
至于 中间 值时
至于 最大 值时
Outliers(轮廓)
Threshold(阙值):给定一个值,如果点的距 离超过这个值将公被忽略
Select(选择)
Include Isolated Points(包含独立的点云): 将那些远离的点也包含其中
冗余点的处理(第三章对于拼齐等功能有讲解) 冗余点,是因拼合、或测量角度等问题产生重叠的多余的点。消除这类点,前两 种方法,手工和滤波器就不适用了。而应该结合 Merge/拼合等功能,将特征与 特征对齐。 点云数量的优化
杂点就是测量错误的点(不是噪声),是无效的
杂点
点,放大后就看得出、很明显地离开零件表面,
孤立的点
扫描质量
因为逆向设备与测量方法的缘故,测量数据存
点云基础知识

点云基础知识嘿,朋友!你有没有听说过点云这个超酷的东西呢?今天呀,我就来给你唠唠点云的基础知识,保证让你大开眼界!我有个朋友叫小李,他在一家科技公司工作。
有一次我去他公司玩,看到他们电脑屏幕上一堆密密麻麻的小点,就像星星散落在夜空中一样。
我就好奇地问他:“这都是些啥呀?看起来乱乱的。
”他笑着告诉我:“这就是点云啊,可别小看这些点,这里面学问大着呢!”那什么是点云呢?简单来说,点云就是在一个三维空间里,由许多点组成的数据集合。
你可以把它想象成是用无数个小珠子在空间里构建出一个物体的形状。
这些点可不是随便分布的,每个点都有它自己的坐标信息,就像我们在地图上找一个地方需要经度和纬度一样,点云里的点有X、Y、Z三个坐标,这样就能确定它在三维空间里的位置啦。
点云是怎么来的呢?这就有好几种方式了。
比如说通过激光扫描设备。
我给你打个比方啊,就像有一个超级厉害的小机器人,它拿着一个激光笔,不停地对着周围的物体发射激光,激光碰到物体就会反射回来,这个小机器人就能根据激光往返的时间算出距离,然后在这个位置记录一个点。
这样扫一圈下来,就得到了很多很多的点,这些点组合在一起就成了点云。
还有一种是通过摄影测量的方法,这就像是我们用很多相机从不同的角度去拍摄一个物体,然后根据照片里物体的特征来计算出点的位置,最后也能得到点云。
点云有啥用呢?用处可大了去了!在建筑行业,点云就像是一个超级助手。
建筑工人要对一个古老的建筑进行修复,可是这个建筑已经有些地方破损了,以前的图纸也可能找不到了。
这时候,用激光扫描设备获取这个建筑的点云数据,就能精确地得到建筑的形状、尺寸等信息。
这就好比给这个建筑做了一个超级详细的3D模型,工人就可以根据这个模型来进行修复工作,多方便呀!在汽车制造领域呢,点云也发挥着重要的作用。
汽车设计师想要设计一款新的汽车,他们可以先对一些现有的汽车模型或者竞争对手的汽车进行点云扫描。
这样就可以清楚地知道别的汽车的外形特点,哪里是流线型的,哪里有独特的设计。
点云检测总结-概述说明以及解释

点云检测总结-概述说明以及解释1.引言1.1 概述点云检测是一种重要的三维感知技术,旨在从稀疏的点云数据中检测和识别物体或场景。
它广泛应用于自动驾驶、机器人感知、虚拟现实等领域。
通过对点云数据进行处理和分析,可以实现对物体的定位、跟踪、分类等功能。
本文将介绍点云检测的常见方法和技术,并对其进行总结和探讨。
文章结构部分的内容如下:1.2 文章结构本文主要分为引言、正文和结论三个部分。
- 引言部分将介绍点云检测的背景和意义,解释为什么要进行点云检测的研究。
同时,会概述本文的内容和目的。
- 正文部分将介绍两种主要的点云检测方法,分析它们的优缺点和应用场景,为读者提供全面的了解。
- 结论部分将对本文进行总结,归纳出点云检测的关键要点,给出对未来研究和应用的建议。
1.3 目的文章目的主要是总结和探讨当前点云检测方法的优缺点,为相关研究和应用提供参考和指导。
通过对不同的点云检测方法进行比较分析,找出其在实际应用中的优势和不足之处,为未来的研究提供新的思路和方向。
同时,希望通过本文的总结,可以促进点云检测技术的发展,提高其在各行业的应用效果和效率,推动人工智能领域的进步和发展。
2.正文2.1 点云检测方法一点云检测是指利用激光雷达或者摄像头等设备获取的点云数据进行目标检测和识别的技术。
在进行点云检测时,我们通常会采用一些特定的方法来处理点云数据,以便能够准确地识别出目标物体。
第一种点云检测方法是基于特征提取和分类的方法。
这种方法首先会对点云数据进行预处理,包括去除噪声、滤波和配准等操作,然后提取点云数据的特征,如表面法向量、曲率和颜色等。
接着,通过训练一个分类器,将提取的特征和目标物体进行分类,最终实现目标检测和识别。
在实际应用中,基于特征提取和分类的点云检测方法可以很好地应用于静态场景下的目标检测,比如建筑物、车辆和行人等。
通过提取点云数据的特征,结合机器学习算法,可以实现高效、准确的目标检测和识别。
总的来说,基于特征提取和分类的点云检测方法在目标检测领域有着广泛的应用前景,可以为自动驾驶、智能监控等领域提供有效的技术支持。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第二章点云阶段基本概念与常用命令讲解
——感谢虚拟样机技术论坛提供,无维论坛TomLee整理
作者:sea_heart
关键词:Geomagic8.0,逆向,点云
来源:无维网()
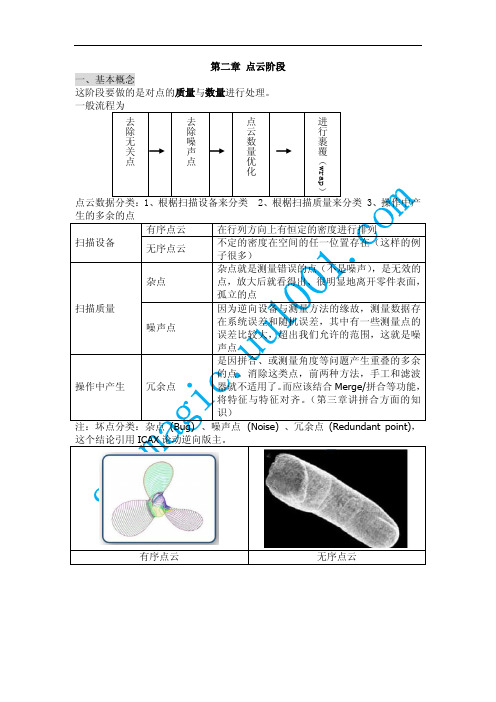
一、基本概念
这阶段要做的是对点的质量与数量进行处理。
一般流程为
点云数据分类:1、根椐扫描设备来分类2、根椐扫描质量来分类3、操作中产生的多余的点
注:坏点分类:杂点(Bug) 、噪声点 (Noise) 、冗余点(Redundant point),这个结论引用ICAX论动逆向版主。
杂点的处理
杂点就是测量错误的点(不是噪声),是无效的点,放大后就看得出、很明显地离开零件表面,孤立的点。
譬如,激光扫描仪生成的图像里就比较多杂点,散布在图像四周,轮廓边缘外尤其多;而CMM的杂点通常较少,或因为零件表面很粗糙、很糟糕,或出现在测量沟、台、孔处,或因测量时的抖动引起。
对这样的点,一般用手工或使用分离点(Disconnected Components)、轮廓(Outliers)将其选择后再删除
分离点是指同一物体上具有一定数量的点形成点群,并且彼此间分离。
此命令应用于无序点云。
将点群定义为群组决定于它们的远近程度和所占整体点云的比例。
用于选取杂点将其删除或后续的使用。
参数:
•分离程度(Separation):影响分离点如何成组。
使用选项低等(Low)、中等(Medium)、高等(High)来控制远近程度。
• 点云数量(Size)——指定点云的数量占整体点云的比例是多少.
举例说明:比如有三组分离的点云,它们分别点的数量所占所有点的比例分别为5%、 10%和 16%。
5%、10%点云相对较接近,而16%的点云则相对独立。
如果Separation(分离程度)为低等,当数量大小(Size)数值为5时,5%的点云将被选择;当数量大小数值为10时,5%和10%的点云将被选择;当数量大小数值为16时,5%、10%和16%的点云将被选择
如果Separation(分离程度)为中等, 当数量大小数值为15时,5% 和 10% 点云将被选择 (也许决定于它们的实际距离);当数量大小数值为16时,所有的点云将被选择。
如果Separation(分离程度)为高等, 5%, 10%, 和 16% 点群将成为一个独立的点群组(也好决定于它们的实际的距离),当数量大小数值为31时,所有的点云群将被选择。
冗余点的处理(第三章对于拼齐等功能有讲解)
冗余点,是因拼合、或测量角度等问题产生重叠的多余的点。
消除这类点,前两种方法,手工和滤波器就不适用了。
而应该结合Merge/拼合等功能,将特征与特征对齐。
点云数量的优化
自由取样:输入比例,取自由取样后的点云数量占原有点云的比例。