2018年ti杯大学生电子设计竞赛题
2018年TI杯大学生电子设计竞赛题B-灭火飞行器

2018年TI 杯大学生电子设计竞赛B 题:灭火飞行器(本科)1.任务基于四旋翼飞行器设计一个灭火飞行器(简称飞行器)。
飞行器活动区域示意图如图1所示。
在图1中,左下方的圆形区域是飞行器起飞及降落点;右侧正方形区域是灭火防区,防区中有4个用红色LED 模拟的火源(火源用单只0.5W 红色发光二极管来实现,建议LED 电流不超过25mA )。
飞行器起飞后从A 处进入防区,并以指定巡航高度在防区巡逻;发现防区有火源,用激光笔发射激光束的方式模拟灭火操作;所有火源全部熄灭后,飞行器从B 处飞离防区返航,返航途中需穿越一个矩形框。
从起飞到降落的整个操作过程不得超过5分钟,时间越短越好。
图1 消防飞行器活动区域示意图2.要求(1) 飞行器从起飞地点垂直起飞升高到150cm ±10cm 的巡航高度。
(15分)(2) 在起飞点的巡航高度上悬停15秒,然后以巡航高度从A 处进入防区巡航飞行。
(10分)(3) 飞行器发现防区内的火源后,飞往火源上方用上激光笔照射火源作为灭火;激光笔光斑在以火源为圆心、直径20cm 圆形区域保持2秒及以上即视为灭火成功。
(30分)(4) 飞行器从B 处飞离防区。
(10分)(5)返航途中飞行器需要穿过一个宽高为10070cm的矩形框。
(15分)(6)回到降落点上空,垂直下降,准确平稳地降落在降落点;(10分)(7)整个飞行过程计时得分。
(10分)(8)其他。
(10分)(9)设计报告(20分)3.说明(1)参赛队使用飞行器时应遵守中国民用航空局的相关管理规定。
(2)飞行器桨叶旋转速度高,有危险!请务必注意自己及他人的人身安全;操作者需佩戴防护镜及防护手套。
(3)飞行器可自制或外购,飞行器机身必须标注参赛队号;飞行器桨叶固定轴间最大轴间距不超过50cm;飞行器必须带防护圈,否则不予测试。
(4)以模拟火源的LED为圆心,画一个直径20cm的圆(边缘线宽不超过1mm),以便观察灭火动作。
TI杯 山东电子设计大赛试题汇总

低功耗数字多功能表的设计制作(A题)【本科】一、任务设计并制作一款多功能数字测量仪表,其示意图如图1所示。
图1 低功耗数字多功能表系统示意图二、要求1. 基本要求(1)采用9V方电池供电。
自行设计保证该仪表正常工作的低功耗供电电源系统。
(2)三位半数字显示,最大读数1999。
(3)测量直流电压量程:0.2V、2V、20V;精度±(1%+2个字);输入阻抗:≥10MΩ。
(4)测量交流电压量程:0.2V、2V、20V;精度±(1.5%+5个字);频率范围:40Hz~400Hz;输入阻抗:≥10MΩ。
(5)测量电阻量程:200Ω、2kΩ、20kΩ;精度±(1%+5个字)。
(6)测量电容量程:100nF、100uF;精度±(5%+10个字)。
(7)晶体三极管β参数测试:测量类型 NPN或PNP,显示范围0~1000,精度±(2%+2个字);测试条件:基极电流约10uA,V CE约3V。
2. 发挥部分(1)增加“自动关机”功能,即在测量模式下,若1分钟内无任何按键按下,仪表将自动关闭供电电源并进入低功耗状态;再按下任意键,仪表将自动返回“自动关机”前的状态。
(2)增加正弦波信号源功能:要求输出正弦波信号的频率为10Hz~100kHz,且可调;非线性失真≤3%。
(3)要求在负载为600Ω时,输出正弦波的最大值(有效值)≥5V;输出正弦波的幅值可调,调节范围100mV~5V。
(4)其他特色(例如:扩展其他功能、提高测量精度、减少失真等)三、说明1、不允许采用数字万用表专用A/D转换器或成品。
2、单片机建议采用MPS430单片机。
四、评分标准低功耗电波钟的设计制作(B题)【本科题】一、任务设计并制作一台低功耗电波钟。
二、要求1.基本要求(1)自行设计制作天线、选频放大,使其能接受中国码(BPC)电波授时数据、并输出包络。
(2)作品上电后尽可能快的完成授时信号的接受、处理。
江西省第18届大学生电子设计制作赛题

江西省第十八届大学生电子设计制作现场赛赛题1)题意:在赛场提供的器材中,选取必要的元件,设计、制作能对饮料易拉罐自动计数且数显计数量的装置。
生产单位常采用如下红外自动计数装置,将装有饮料的易拉罐放在马达带动的传动带上,在传动带运动的过程中让每罐易拉罐依次同一方向地穿过红外发射、接收系统,形成计数脉冲,然后计数脉冲经电路加工、计数,再数显易拉罐计数结果,则就知道其生产量。
限于赛场条件,不可能每位参赛者面前提供马达传动的易拉罐,只能模拟。
故要求将红外发射、接收系统安置在作品的万能板上,二者保持1CM以上的距离即可,用参赛证对折后插入红外发射、接收系统中,表示有易拉罐穿过红外线,拔出则无,于是在电路上同样可形成计数脉冲。
要求是,作品完工后,能按如下流程演示功能:作品接入电源,电源指示灯〔绿灯)亮。
手动清零,显示“0 0”。
模拟易拉罐传动形成计数脉冲,计数脉冲指示灯(黄灯)亮。
随着模拟易拉罐穿过红外收、发系统的次数渐增,计数器计数渐增,显示器依次显示01, 02, 03,…10, 11, 12,13,…20。
一旦计数达20,计数脉冲形成电路便停止工作,自然没有计数脉冲输出,计数脉冲指示灯不再闪亮,显示器也停止在“20”,无论红外系统内有否物件穿插,始终显示“20”不变,表示此时计满一箱;要继续计数,必须先清零,显示“0 0”,方可幵始新一轮计数,直至显示“20”,表明又计满一箱。
…作品必须能如此复往工作。
元件清单实训电路如图14.65所示,电路中VDT为红外发射、接收装置,彼此相隔至少1CM的距离,可容卡片(如VIP卡片)插入、拔出。
4N25为光耦合器件。
3)电路工作原理计数脉冲的形成,易拉灌的计数以其先进后出红外装置形成一个计数单位,模拟时,以卡片先进后出红外装置作为一计数单位。
卡片进人,VT1输出低电平,卡片出使VT1输出高电平——这一过程形成正脉冲作为计数脉冲。
平时,无卡片插人VDT,NE555的②、⑥脚为高电平,则③脚输出低电平,三极管VT1截止,其集电极为高电平。
全国大学生电子设计竞赛TI杯模拟电子系统专题邀请赛试题
宽带放大器(A 题)、任务设计制作一个5V 单电源供电的宽带低噪声放大器,输出为50Ω阻性负载。
、要求1.基本要求(1)限定采用高速运算放大器OPA820ID 作为第一级放大电路,THS3091D 作为末级放大电路,利用DC-DC 变换器TPS61087DRC 为末级放大电路供电;(2)放大器电压增益≧40dB(100 倍),并尽量减小带内波动;(3)在最大增益下,放大器下限截止频率不高于20Hz,上限截止频率不低于5MHz ;(4)在输出负载上,放大器最大不失真输出电压峰峰值≥10V。
2.发挥部分(1)在达到40dB 电压增益的基础上,提高放大器上限截止频率,使之不低于10MHz ;(2)尽可能降低放大器的输出噪声;(3)放大器输入为正弦波时,可测量并数字显示放大器输出电压的峰峰值和有效值,输出电压(峰峰值)测量范围为0.5~10V,测量相对误差小于5%;(4)其他。
三、评分标准完成第(3)项18完成第(4)项10小计50发挥部分完成第(1)项10完成第(2)项20完成第(3)项10完成第(4)项10小计50总分130点光源跟踪系统(B 题)一、任务设计并制作一个能够检测并指示点光源位置的光源跟踪系统,系统示意图如图1 所示。
光源B 使用单只1W 白光LED ,固定在一支架上。
LED 的电流能够在150~350mA 的范围内调节。
初始状态下光源中心线与支架间的夹角θ约为60o,光源距地面高约100cm,支架可以用手动方式沿着以A 为圆心、半径r 约173cm 的圆周在不大于±45o的范围内移动,也可以沿直线LM 移动。
在光源后3 cm 距离内、光源中心线垂直平面上设置一直径不小于60cm 暗色纸板。
光源跟踪系统A 放置在地面,通过使用光敏器件检测光照强度判断光源的位置,并以激光笔指示光源的位置。
图1、要求1.基本要求光源跟踪系统示意图(1)光源跟踪系统中的指向激光笔可以通过现场设置参数的方法尽快指向点光源;(2)将激光笔光点调偏离点光源中心30cm 时,激光笔能够尽快指向点光源;(3)在激光笔基本对准光源时,以A 为圆心,将光源支架沿着圆周缓慢(10~15 秒内)平稳移动20o(约60cm),激光笔能够连续跟踪指向LED 点光源;2.发挥部分(1)在激光笔基本对准光源时,将光源支架沿着直线LM 平稳缓慢(15 秒内)移动60cm,激光笔能够连续跟踪指向光源。
2018年安徽省大学生电子设计竞赛“TI杯”(最高奖)获奖作品--灭火飞行器设计报告

2018年安徽省TI杯大学生电子设计竞赛灭火飞行器(B题)设计报告目录摘要: (2)关键词: (2)一、系统方案 (3)1.1 控制系统的选择 (3)1.2 飞行姿态控制的论证与选择 (3)1.3 电机的选择 (3)1.4 高度测量模块的论证与选择 (3)1.5 边界判断模块的选择 (3)1.6 角速度与加速度测量模块选择 (4)二、设计与论证 (4)2.1 控制方法设计 (4)2.1.1降落及飞行轨迹控制 (4)2.1.2 飞行高度控制 (5)2.1.3 飞行姿态控制 (5)2.2 参数计算 (6)三、理论分析与计算 (6)3.1 Pid控制算法分析 (6)四、电路与程序设计 (9)4.1 系统组成 (9)4.2 系统框图 (9)4.3 系统各模块电路图 (10)4.4 程序流程图 (13)五、测试方案与测试条件 (13)5.1 测试方案 (13)5.2 测试条件 (14)六、结论 (16)6.1 pid控制如下图: (16)附录一:元器件明细表 (18)附录二:仪器设备清单 (18)附录三:程序 (18)摘要:本系统由数据采集、数据信号处理、飞行姿态和航向控制等部分组成。
系统选用STM32F4单片机作为主控芯片,对从STM32F4芯片读取到的一系列数据进行PID算法处理并向飞行器的电调给出相应指令,从而达到对飞行器飞行姿态的控制。
采用STM32F4芯片采集四旋翼飞行器的三轴角速度和三轴角加速度数据,用激光定高来判断“火源位置”,以保证飞行器可以直接找到“火源”。
通过使用激光判断边界区域,确保可以在相应范围内飞行;nrf51422无线通信模块用来实现遥控器和飞行器之间的通信。
关键词:STM32F4单片机激光传感器超声波测距定高 PID算法光流定点模块nrf51422无线模块一、系统方案本系统主要由控制模块、激光定高模块、电机调速模块、循迹模块、无线通信模块组成,下面分别论证这几个模块的选择。
1.1 控制系统的选择方案一:STM32F1单片机作为主控芯片来控制飞行器的飞行姿态与方向,带有摄像头采集,并把摄像头采集的数据发送给STM32F4进行处理,运用 pid算法进行姿态调整。
2018年安徽省大学生电子设计竞赛“TI杯”(最高奖)获奖作品--灭火飞行器设计报告
2018年安徽省TI杯大学生电子设计竞赛灭火飞行器(B题)设计报告目录摘要: (2)关键词: (2)一、系统方案 (3)1.1 控制系统的选择 (3)1.2 飞行姿态控制的论证与选择 (3)1.3 电机的选择 (3)1.4 高度测量模块的论证与选择 (3)1.5 边界判断模块的选择 (3)1.6 角速度与加速度测量模块选择 (4)二、设计与论证 (4)2.1 控制方法设计 (4)2.1.1降落及飞行轨迹控制 (4)2.1.2 飞行高度控制 (5)2.1.3 飞行姿态控制 (5)2.2 参数计算 (6)三、理论分析与计算 (6)3.1 Pid控制算法分析 (6)四、电路与程序设计 (9)4.1 系统组成 (9)4.2 系统框图 (9)4.3 系统各模块电路图 (10)4.4 程序流程图 (13)五、测试方案与测试条件 (13)5.1 测试方案 (13)5.2 测试条件 (14)六、结论 (16)6.1 pid控制如下图: (16)附录一:元器件明细表 (18)附录二:仪器设备清单 (18)附录三:程序 (18)摘要:本系统由数据采集、数据信号处理、飞行姿态和航向控制等部分组成。
系统选用STM32F4单片机作为主控芯片,对从STM32F4芯片读取到的一系列数据进行PID算法处理并向飞行器的电调给出相应指令,从而达到对飞行器飞行姿态的控制。
采用STM32F4芯片采集四旋翼飞行器的三轴角速度和三轴角加速度数据,用激光定高来判断“火源位置”,以保证飞行器可以直接找到“火源”。
通过使用激光判断边界区域,确保可以在相应范围内飞行;nrf51422无线通信模块用来实现遥控器和飞行器之间的通信。
关键词:STM32F4单片机激光传感器超声波测距定高 PID算法光流定点模块nrf51422无线模块一、系统方案本系统主要由控制模块、激光定高模块、电机调速模块、循迹模块、无线通信模块组成,下面分别论证这几个模块的选择。
1.1 控制系统的选择方案一:STM32F1单片机作为主控芯片来控制飞行器的飞行姿态与方向,带有摄像头采集,并把摄像头采集的数据发送给STM32F4进行处理,运用 pid算法进行姿态调整。
2018年TI杯模拟电子系统设计邀请赛题B—简易水箱液位监控系统
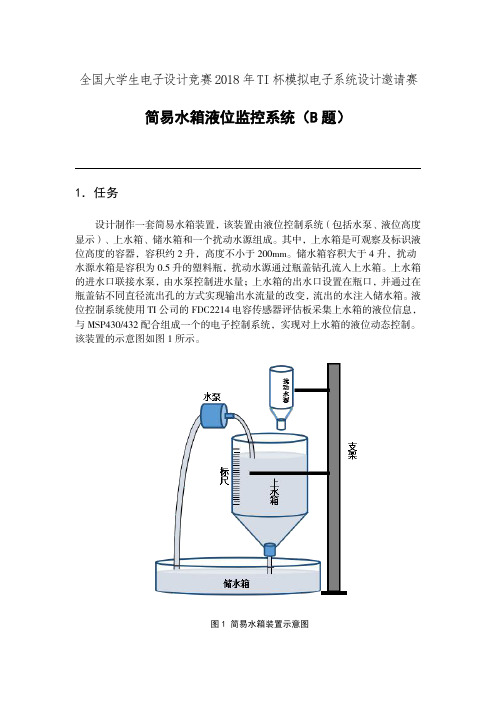
全国大学生电子设计竞赛2018年TI杯模拟电子系统设计邀请赛简易水箱液位监控系统(B题)1.任务设计制作一套简易水箱装置,该装置由液位控制系统(包括水泵、液位高度显示)、上水箱、储水箱和一个扰动水源组成。
其中,上水箱是可观察及标识液位高度的容器,容积约2升,高度不小于200mm。
储水箱容积大于4升,扰动水源水箱是容积为0.5升的塑料瓶,扰动水源通过瓶盖钻孔流入上水箱。
上水箱的进水口联接水泵,由水泵控制进水量;上水箱的出水口设置在瓶口,并通过在瓶盖钻不同直径流出孔的方式实现输出水流量的改变,流出的水注入储水箱。
液位控制系统使用TI公司的FDC2214电容传感器评估板采集上水箱的液位信息,与MSP430/432配合组成一个的电子控制系统,实现对上水箱的液位动态控制。
该装置的示意图如图1所示。
图1简易水箱装置示意图2.要求(1)设计并制作水泵驱动电路及液位检测电路,实现可控注水,检测并显示上水箱液位,检测误差不大于2mm。
(25分)(2)上水箱预装自来水,液位高度约为50mm。
上水箱放水口直径为4mm,并堵住上水箱放水口。
然后启动水泵向上水箱注水,要求在10s时间内使上水箱液位上升到90mm,误差不大于2mm。
(20分)(3)开启上水箱流出孔向储水箱放水,同时水泵向上水箱注水,10s内控制上水箱中液位在90mm高度,并保持10s以上,液位误差<2mm。
(15分)(4)30s内控制上水箱液位高度由90mm改变到110mm并保持稳定10s以上,液位误差<2mm。
(20分)(5)在完成(4)的基础上,扰动水源水箱装入200ml的自来水,其水箱流出孔为3mm,并开始向上水箱注水,直至扰动水源水箱中的水排空,过程中控制上水箱液位稳定保持在110mm,液位误差<2mm。
(15分)(6)其他(5分)(7)设计报告(10分)项目主要内容满分方案论证比较与选择,方案描述2理论分析与计算系统相关参数设计4电路与程序设计系统组成,原理框图与各部分的电路图,系统软件与流程图2测试方案与测试结果测试结果完整性,测试结果分析2总分10 3.说明(1)扰动水源水箱不能安装传感器。
2018年TI杯大学生电子设计竞赛无线话筒扩音系统(F题)报告
2018年TI杯大学生电子设计竞赛无线话筒扩音系统(F题)【本科及高职高专】2018年07月23日本设计是以RDA5820NS为核心的无线话筒扩音系统,采用模拟调频方式,载频范围88MHz~108MHz,可以在大于10m的距离上实现无线语音的传输。
无线话筒信号可以由调频收音机收听。
此外,无线话筒开机时可自动检测可用信道,自动避免干扰。
接收机由TI公司的MSP430F5529作为系统主控,可同时接收两个无线话筒的信号并对其进行混音处理,接收机输出功率为1W,可直接驱动8Ω喇叭。
关键词:调频,无线话筒,接收机,混音,MSP430F5529AbstractThis design is based on RDA5820NS as the core wireless microphone amplification system, using analog frequency modulation, the carrier frequency range is 88MHz~108MHz, and wireless voice transmission can be realized at a distance greater than 10m. The wireless microphone signal can be heard by the FM radio. In addition, the wireless microphone automatically detects the available channels when it is turned on, automatically avoiding interference. The receiver is controlled by TI's MSP430F5529 as the system master. It can simultaneously receive and mix the signals of two wireless microphones. The receiver output power is 1W, which can directly drive 8Ω speakers.Keyword:FM, wireless microphone, receiver, mix, MSP430F5529一.系统方案 (4)1.方案比较与选择 (4)1)发射机主芯片选择 (4)2)麦克风放大模块 (4)3)加法器模块 (4)4)混音模块 (5)5)音频功放模块 (5)2.方案描述 (5)二.理论分析与计算 (7)1.加法器模块 (7)2.发射功率计算 (7)三.电路与程序设计 (7)1.电路设计 (7)1)无线话筒电路设计 (7)2)麦克风放大电路设计 (8)3)混响电路设计 (8)4)音频功放电路设计 (9)5)加法器电路设计 (9)2.程序设计 (10)四.测试方案与测试结果 (11)1.测试仪器 (11)2.测试结果 (11)五.结论 (12)六.参考文献 (12)无线话筒扩音系统(F题)【本科及高职高专】一.系统方案1.方案比较与选择1)发射机主芯片选择方案一:采用分立元件搭建采用模拟方案。