论文介绍-无速度传感器矢量控制
毕业设计论文——异步电机无速度传感矢量控制系统的研究[管理资料]
![毕业设计论文——异步电机无速度传感矢量控制系统的研究[管理资料]](https://img.taocdn.com/s3/m/cb800afc844769eae109ed41.png)
毕业设计论文题目:异步电机无速度传感矢量控制系统的研究(院)系应用技术学院专业电气工程班级0682学号200613010229 学生姓名李舜婷导师姓名蔡斌军完成日期2010-06-15湖南工程学院应用技术学院毕业设计(论文)任务书设计(论文)题目:异步电机无速度传感矢量控制系统的研究姓名专业电气工程及其自动化班级学号############指导老师蔡斌军职称讲师教研室主任谢卫才一、基本任务及要求:本课题以交流异步电机为控制对象在simulink设计平台上进行无速度传感矢量控制系统进行仿真研究。
主要内容及要求为:①掌握矢量控制调速系统的工作原理及结构组成;②研究无速度传感的速度辨识的方法;③掌握系统的仿真软件matlab/simulink;④建立无速度传感矢量控制系统的仿真模型并进行仿真验证;⑤编写设计说明书等。
通过本系统的设计,可达到以下目标:①掌握矢量控制中速度的辨识方法;②掌握基于simulink的仿真模型建立的方法;③验证方法的可行性及效果。
二.进度安排及完成时间:2月26日-3月10日指导老师布置任务, 学生查阅资料3月11日-3月16日撰写文献综述和开题报告, 电子文档上传FTP3月17日-3月30日毕业实习、撰写实习报告4月1日-4月30日总体设计,仿真模型的建立,中期检查5月1日-5月30日仿真调试,得出结论6月1日-6月12日撰写毕业设计说明书6月12日-6月14日修改、装订毕业设计说明书,电子文档上传FTP6月15日-6月20日毕业设计答辩及成绩评定目录摘要...................................................... 错误!未定义书签。
ABSTRACT .. (II)第一章绪论 (1) (1) (1) (2) (2) (2) (3) (4) (4) (4) (5)第二章矢量控制原理 (6) (6)异步电动机模型分析的数学基础 (7)坐标变换的原则和基本思想 (7)三相/二相变换 (8)二相/二相旋转变换 (8)三相静止坐标系/任意二相旋转坐标系的变换 (8)异步电动机的动态数学模型 (9)异步电动机在三相静止坐标系上的数学模型 (9)异步电动机在任意二相旋转坐标系上的数学模型 (10)异步电动机在二相静止坐标系上的数学模型 (11)异步电机的电磁转矩模型 (12)异步电动机的磁链模型 (12)第三章异步电机矢量控制原理 (14) (14) (16) (21) (22) (23) (23)第四章建立无速度传感矢量控制仿真模型并进行仿真 (26)结束语 (34)参考文献 (35)异步电机无速度传感矢量控制系统的研究摘要:交流电机是一个多变量、强耦合的非线性系统,同时其转矩也不易控制,因此要实现高性能的交流电机控制是件十分困难的事情。
《异步电机无速度传感器矢量控制系统的设计与实现》

《异步电机无速度传感器矢量控制系统的设计与实现》一、引言异步电机在工业应用中占有重要地位,其运行性能的优劣直接影响到生产效率和产品质量。
随着现代控制理论的发展,无速度传感器矢量控制系统因其高精度、高效率的特性被广泛应用于异步电机控制。
本文将探讨异步电机无速度传感器矢量控制系统的设计与实现,旨在为相关领域的研究与应用提供参考。
二、系统设计1. 系统架构设计异步电机无速度传感器矢量控制系统主要由控制器、驱动器、逆变器、异步电机等部分组成。
其中,控制器是整个系统的核心,负责实现矢量控制算法和无速度传感器技术。
驱动器接收控制器的指令,将电压和电流信号输出给逆变器。
逆变器根据驱动器的指令,将直流电源转换为交流电源,驱动异步电机运行。
2. 矢量控制算法设计矢量控制算法是实现异步电机高效运行的关键。
本系统采用无速度传感器矢量控制算法,通过检测电机的电压和电流信号,估算电机的转速和转子位置,实现电机的精确控制。
该算法包括磁场定向控制(MTPA)和直接自控制(DTC)两种方法,具有较高的动态性能和稳态性能。
3. 无速度传感器技术设计无速度传感器技术是实现异步电机无机械传感器运行的关键技术。
本系统采用基于电流模型和电压模型的无速度传感器技术,通过检测电机的电流和电压信号,估算电机的转速和转子位置。
该方法具有较高的估算精度和可靠性,降低了系统的成本和复杂度。
三、系统实现1. 硬件实现硬件实现主要包括控制器、驱动器、逆变器等部分的选型和设计。
控制器采用高性能数字信号处理器(DSP),具有高速运算和强大的控制能力。
驱动器采用高精度、低噪声的功率模块,保证电机的稳定运行。
逆变器采用智能功率模块(IPM),具有较高的效率和可靠性。
2. 软件实现软件实现主要包括矢量控制算法和无速度传感器技术的编程实现。
本系统采用C语言编写程序,实现矢量控制算法和无速度传感器技术的实时运算和控制。
同时,为了方便调试和维护,系统还提供了友好的人机交互界面。
《异步电机无速度传感器矢量控制系统的设计与实现》

《异步电机无速度传感器矢量控制系统的设计与实现》一、引言随着现代工业技术的飞速发展,对于电机控制系统的性能和可靠性要求也越来越高。
其中,异步电机无速度传感器矢量控制系统是一种能够满足高性能需求的技术手段。
这种系统不需要机械式速度传感器,就能够精确控制电机的转矩和速度,具有较高的动态响应和稳定性。
本文将详细介绍异步电机无速度传感器矢量控制系统的设计与实现过程。
二、系统设计1. 总体设计异步电机无速度传感器矢量控制系统主要由电机本体、逆变器、控制器等部分组成。
其中,控制器是整个系统的核心部分,负责实现电机的矢量控制。
2. 矢量控制算法设计本系统采用无速度传感器矢量控制算法,主要包括磁链观测、转子时间常数辨识、电流控制等部分。
其中,磁链观测是实现无速度传感器控制的关键技术之一,能够根据电机定子电压和电流信息估计出转子磁链的位置和大小。
转子时间常数的辨识则是为了提高系统的动态性能和鲁棒性。
电流控制则是根据电机转矩需求和观测到的转子磁链信息,控制逆变器输出电压,实现电机的精确控制。
3. 控制器硬件设计控制器硬件主要包括微处理器、功率驱动电路、采样电路等部分。
微处理器是控制器的核心部件,负责运行矢量控制算法和实现各种保护功能。
功率驱动电路将微处理器的控制信号转换为逆变器所需的驱动信号。
采样电路则负责实时采集电机的电压、电流等信号,为矢量控制算法提供必要的输入信息。
三、系统实现1. 软件设计软件设计主要包括操作系统、控制算法程序等部分。
操作系统负责管理控制器的硬件资源,为控制算法程序提供运行环境。
控制算法程序则是实现无速度传感器矢量控制的核心程序,包括磁链观测、转子时间常数辨识、电流控制等部分的实现。
2. 实验验证为了验证本系统的性能和可靠性,我们进行了大量的实验验证。
实验结果表明,本系统具有较高的动态响应和稳定性,能够精确控制电机的转矩和速度,且无需机械式速度传感器,具有较高的实用价值。
四、结论本文介绍了一种异步电机无速度传感器矢量控制系统的设计与实现过程。
异步电机无速度传感器矢量控制策略综述

矢量控制策略具有动态响应快、转 矩脉动小、运行效率高等技术优势 ,在异步电机控制领域得到了广泛 应用。
02
异步电机无速度传感器技术
无速度传感器技术原理
估计转速和位置
通过检测电机的电压、电流等电气信 号,利用特定的算法估计电机的转速 和转子位置。
消除机械传感器
无需使用机械式的速度传感器,降低 了系统的复杂性和成本,同时提高了 系统的可靠性和维护性。
节能环保
无速度传感器技术能够实 现电机的精确控制,减少 不必要的能耗,有利于节 能环保。
矢量控制策略简介
基本原理
矢量控制策略是一种通过坐标变 换将三相交流电机等效为直流电 机进行控制的方法,可以实现电
机的高性能控制。
控制方法
矢量控制策略包括磁场定向控制( FOC)和直接转矩控制(DTC)等 方法,可以根据不同的应用需求选 择合适的控制方法。
无速度传感器技术分类
01
基于电机模型的方法
利用电机的数学模型,通过检测电机的电压、电流等电气信号估计转速
和转子位置。如基于扩展卡尔曼滤波器(EKF)的方法。
02
基于信号处理的方法
通过分析电机运行过程中的信号特征来估计转速和转子位置。如基于振
动信号分析、电流频谱分析等方法。
03
混合方法
结合电机模型和信号处理的方法,以充分利用两者的优点,提高估计精
展望
• 在未来,该控制策略有望成为电机控制领域的主流 技术之一,为工业自动化、智能家居等领域带来更 多的创新和变革。
THANK YOU
异步电机无速度传感器矢量控制策略的优势与局限
优势
局限
• 无需使用速度传感器,降低了系统成本和复杂度。
• 通过对电机参数的精确测量和计算,可以实现高精度 的矢量控制,提高了电机的运行效率和性能。
永磁同步电机无速度传感器的矢量控制研究
永磁同步电机无速度传感器的矢量控制研究随着电动车、风力发电和工业自动化等领域的快速发展,对电机性能的要求也越来越高。
永磁同步电机作为一种高效、高性能的电机,被广泛应用于这些领域。
然而,传统的永磁同步电机控制方法需要使用速度传感器来实时获取电机转速信息,增加了系统复杂性和成本。
为了解决这一问题,研究人员开始探索无速度传感器的矢量控制方法。
无速度传感器的矢量控制方法是一种基于电机的电流和电压信息来估计电机转速的控制策略。
这种方法可以减少系统的复杂性和成本,并提高系统的可靠性。
在永磁同步电机的矢量控制中,首先通过电压源逆变器将直流电源转换为交流电源,并通过空间矢量调制控制方法产生合适的电压矢量。
然后,通过电流环控制和速度环控制,实现对电机的控制。
在无速度传感器的矢量控制方法中,电机转速的估计是关键的一步。
传统的速度估计方法有观测器法、模型基于法和滑模法等。
观测器法是一种基于状态观测器的方法,通过估计电机转子位置和速度来实现转速的估计。
模型基于法是一种基于电机数学模型的方法,通过对电机状态方程的求解来估计转速。
滑模法是一种基于滑模控制理论的方法,通过设计滑模面来实现转速的估计。
然而,这些传统的速度估计方法存在一些问题。
观测器法需要较高的计算复杂度和较大的估计误差。
模型基于法需要精确的电机参数和较长的响应时间。
滑模法对控制参数的选择敏感,并且容易产生震荡。
为了改进无速度传感器的矢量控制方法,研究人员提出了一些新的技术。
例如,基于自适应算法的速度估计方法可以根据电机工作状态自动调整估计参数,提高估计精度。
基于模型预测控制的速度估计方法可以通过对电机转子位置和速度的预测来实现转速的估计。
这些新的方法在提高控制性能和减少系统复杂性方面取得了一定的成果。
综上所述,永磁同步电机无速度传感器的矢量控制是电机控制领域的研究热点之一。
通过研究新的速度估计方法,可以提高永磁同步电机控制系统的性能和可靠性,降低成本和复杂度。
无速度传感器矢量控制原理

无速度传感器矢量控制原理无速度传感器矢量控制(Sensorless Vector Control)是一种在没有速度传感器的情况下实现电机精确速度和转矩控制的方法。
该控制方法广泛应用于交流电机,如感应电机和永磁同步电机。
无速度传感器矢量控制原理的核心在于通过电机自身的电压和电流信息,估计出电机的转速和转矩,进而控制电机的运行状态。
无速度传感器矢量控制的实现需要以下主要步骤:1. 电流采样与转换:首先,需要对电机的三相电压和电流进行采样并进行模数转换,通常使用模数转换器(ADC)来完成这项工作。
采样频率应该足够高,以确保对电流的精确测量。
2. 电流控制环:电流控制环的目的是保持电机的电流和预期值保持一致,以实现所需的电机转矩控制。
电流控制环通常由PID控制器组成,控制器使用电流误差信号来调整电机的电压,使电流保持在预期值。
3. 电流解耦:在电流控制环之后,需要进行电流解耦操作,将三相电流转换成直流坐标系下的两个分量:一个是磁场分量,另一个是扭矩分量。
这一步骤的目的是消除电机中的交叉耦合,使得电机的控制更为简单。
4. 转速和转矩估算:在无速度传感器的情况下,需要通过电流和电压信息来估计电机的转速和转矩。
估算转速的常用方法是利用感应电机的反电动势(back-EMF)或者永磁同步电机的电压方程,并使用观测器来估计转速值。
转矩的估算可以利用电流和电压信息,结合电机的恒功率特性来进行估算。
5. 转速和转矩控制:通过估算出的转速和转矩值,可以根据要求设定所需的转速和转矩控制策略。
通常采用PID控制器来根据转速和转矩误差来调整电机的电压,以使电机的运行状态达到设定值。
需要注意的是,无速度传感器矢量控制虽然可以不依赖于传感器来实现电机的速度和转矩控制,但在实际应用中,需要具备准确的电机模型和参数,以及高性能的数字信号处理器(DSP)或者微控制器(MCU)来实现控制算法。
此外,该方法在低速和低转矩运行时可能存在一些误差,因此在特定应用场景中,可能还需要使用速度传感器来提高控制的准确性。
异步电机无速度传感器矢量控制策略综述

06
总结与展望
研究成果与结论
01
矢量控制策略在异步电机控制中具有重要应用价值,无速度传感器技术可有效 提高控制精度和响应速度。
02
本文综述了近年来矢量控制策略在异步电机无速度传感器控制方面的研究成果 ,并对其进行了分类和比较。
03
基于滑膜观测器和卡尔曼滤波器的无速度传感器控制策略是当前研究的热点, 但在低速和高速运行区域仍存在一些问题需要进一步研究和改进。
异步电机矢量控制系统模型
异步电机矢量控制系统模型包括异步电机本体、 功率变换器、控制器和测量单元等组成部分。
测量单元负责测量电机的实际转速和电流等参数 ,为控制器提供反馈信号。
控制器是矢量控制系统的核心,它通过接收转速 指令和电机实际转速的反馈信号,经过相应的控 制算法计算出控制量,作用于功率变换器和电机 本体。
基于人工智能的控制策略
该策略利用神经网络、模糊逻辑等人工智能技术 进行速度估计,具有较好的鲁棒性和适应性,但 需要大量的数据训练。
基于模型的控制策略
该策略主要通过建立电机的数学模型,利用模型 参数进行速度估计,具有较高的控制精度,但需 要对电机参数进行准确辨识。
混合控制策略
该策略综合了基于模型的控制策略和基于人工智 能的控制策略的优点,能够提高控制精度和鲁棒 性,是未来的发展趋势。
02
异步电机矢量控制理论基础
矢量控制基本原理
矢量控制是一种通过坐标变换将异步电机的三 相变量转换为直交变量,再通过相应的控制算 法实现对异步电机的精确控制的方法。
矢量控制的核心思想是通过控制直交变量的幅 值和相位来控制异步电机的转速和转矩。
矢量控制能够实现对异步电机的精确控制,提 高电机的运行效率和平稳性。
异步电动机无速度传感器的矢量控制
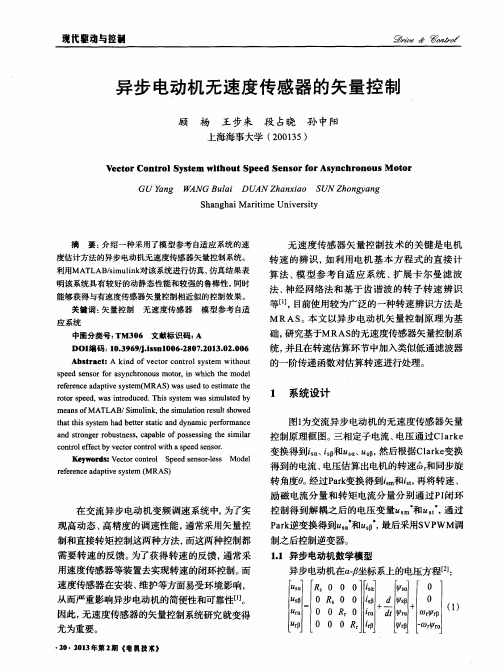
算法 、 模 型参 考 自适 应 系统 、 扩展卡 尔曼滤 波 法、 神经 网络法和基于齿 谐波 的转子 转速 辨识
关键词: 矢量控制
应 系统
无速度传感器
模型参考 自 适
等[ 1 】 , 目前使用较为广泛的一种转速辨识方法是
M RAS 。本 文 以异 步 电动 机 矢 量 控 制 原 理 为 基
中图分类号: T M3 0 6 文献标识码 : A
DOI 编码 : 1 0 . 3 9 6 9 / j . 1 s s nl 0 0 6 . 2 8 0 7 . 2 0 1 3 . 0 2 . 0 0 6
Abs t r a c t :A ki n d o f v e c t o r c o n t r o l s y s t e m wi t h o u t s p e e d s e n s o r f o r a s y n c h r o n o u s mo t o r , i n wh i c h t h e mo d e l
础, 研究基于MR AS 的无速度传感器矢量控制系
统, 并且在转速估算环节中加入类似低通滤波器 的一阶传递 函数对估算转速进行处理。
r e f e r e n c e a d a p t i v e s y s t e m( MRAS ) w a s u s e d t o e s t i ma t e t h e
现代驱动与控嗣
异 步 电动机 无速 度传 感器 的矢 量控 制
顾 杨 王 步来 段 占晓 孙 中阳
上海海事大学 ( 2 0 0 1 3 5 )
Ve c t o r Co n t r o l S y s t e m wi t ho u t S pe e d Se ns o r f o r As y nc hr o no us Mo t o r
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3
English for Academic Purposes
Author
Chintan Patel
Rijil Ramchand
Anandarup Das
Indian Institute
of Science
K. Sivakumar
K. Gopakumar
4
English for Academic Purposes
Experimental results show that the proposed sensorless drive, with good dynamic performance and smooth operation extending up to six-step mode, can be considered as a replacement to the conventional general-purpose V/f control drive.
10
English for Academic Purposes
Thanks
11
English for Academic Purposes
The present sensorless vector control scheme eliminates requirements of terminal voltage sensing for entire speed operation up to six-step mode.
appropriate device on-state drops are compensated to achieve a steady-state operation up t
English for Academic Purposes
Hysteresis Controller
8
English for Academic Purposes
Estimation
Equations
9
English for Academic Purposes
Conclusion
Content
1. Title & Author 2. Basic Knowledge 3. Estimation 4. Conclusion
2
English for Academic Purposes
Tittle
A Rotor Flux Estimation During Zero and Active Vector Periods Using Current Error Space Vector From a Hysteresis Controller for a Sensorless Vector Control of IM Drive
Induction Motor
IM: Induction Motor 感应电机(异步电机)
5
English for Academic Purposes
Sensor
Sensorless:无速度传感器 Sensor: 有速度传感器 PG(Pulse Generator):编码器
6
English for Academic Purposes
English for Academic Purposes
A Rotor Flux Estimation During Zero and Active Vector Periods Using Current Error Space Vector From a Hysteresis Controller for a Sensorless Vector Control of IM Drive