平面连杆机构2PPT课件
第2章 平面连杆机构

起重机 材料学院
受电弓
15
材料加工机械设计
2.3Байду номын сангаас铰链四杆机构的力学特性
2.3.1 铰链四杆机构曲柄存在条件 2.3.2 急回运动 2.3.3 压力角和传动角 2.3.4 死点位置
16
材料学院
材料加工机械设计
2.3.1 铰链四杆机构曲柄存在条件
通过对铰链四杆机构的三种基本形式的分析可以 看到,三种基本形式的区别在于有无曲柄和有几个曲 柄。观察铰链四杆机构四个杆相对长度对机构类型的 影响的动画,可以观察到,铰链四杆机构的三种基本 形式与机构中四个杆相对长度有关系。那么,铰链四 杆机构在什么情况下有曲柄呢?
个曲柄、两个曲柄或没有曲柄,还需根据取何杆
为机架来判断。
24
材料学院
材料加工机械设计
2.3.1 铰链四杆机构曲柄存在条件
观看动画
进入演示
25
材料学院
材料加工机械设计
2.3.2 急回运动
首先我们看一看曲柄摇杆机构急回特性 在曲柄摇杆机构,AB为曲柄是原动件等角速度转
动,BC为连杆,CD为摇杆,当CD杆处于C1D位置为 初始位置,C2D终止位置,摇杆在两极限位置之间所 夹角度称为, 摇杆的摆角,用 表示。当摇杆CD由C1D摆 动到C2D位置时,所需时间为t1,平均速度为
23
材料学院
材料加工机械设计
2.3.1 铰链四杆机构曲柄存在条件
如果铰链四杆机构中的最短杆与最长杆长度之
和大于其余两杆长度之和,则该机构中不可
能存在曲柄,无论取哪个构件作为机架,都只
能得到双摇杆机构。
由上述分析可知,最短杆和最长杆长度之和小
于或等于其余两杆长度之和是铰链四杆机构曲柄
第2章平面连杆机构

3. 双摇杆机构 两连架杆均为摇杆的铰链四 杆机构称为双摇杆机构。
6
铰链四杆机构基本类型的特性
曲柄摇杆机构
两个连架杆中,一个是曲柄,一个 是摇杆。通常曲柄主动,摇杆从动,但 也有摇杆主动的情况。应用例:牛头刨 床进给机构、雷达调整机构、缝纫机脚 踏机构、复摆式腭式破碎机、钢坯输送 机等。
满足: 最短杆为机架: 双曲柄机构
最短杆为连杆: 双摇杆机构
22
课堂练习
23
24
§2-2 铰链四杆机构的演变
一、曲柄滑块机构
图a 所示的曲柄摇杆机构中,C点的轨 迹位于半径为 的圆周上。显然,若将回转 副D直径增大,再将杆3作成圆环形,C点的 运动规律不变,但机构却演化为曲柄滑块机 构了。若进一步将导路的曲率半径增大趋于 ∞,则得到图c 所示的曲柄滑块机构。
11
行程速比系数K
急回特性常用行程速比系数K(摇杆反、正行程平均速度之 比)来度量。
如图所示,曲柄顺时针匀速转动,摇杆左右摆动(顺时针为 正行程,逆时针为反行程)。我们把摇杆处于两极限位置时 连杆对应位置所夹的锐角称为极位夹角,用θ表示。根据 行程速比系数的定义有:
c1c2
K v2 v1
t2
7
雷达调整机构和缝纫机脚踏机构
8
腭式破碎机
9
钢材输送机
四杆机构运动时,其连杆通常作平面复杂 运动,连杆上每一点的轨迹都是一条封闭的曲 线,我们称之为连杆曲线。图示步进式传送机 构就是连杆曲线的典型应用,当两个曲柄同步 转动时,与两个连杆相连的推杆5沿着红色的 卵形曲线平动,从而实现定时间隙地传送工件。
33
三、给定连架杆的三对对应位置
第2章平面连杆机构
把铰销B扩大,使其包含A,这时曲柄演化为一几何中心不与回转中 心相重合的圆盘,此盘称为偏心轮,两中心间距称偏心距,等于曲柄之 长,这种机构称为偏心轮机构。 该结构可避免在较短的曲柄两端设两个转动副而引起的结构设计上 的困难, 且盘状构件在强度上比杆状高得多,所以多用于载荷较大或AB较短的 场合。 2、 转动副转化成移动副
例:设计一曲柄摇杆机构,已知摇杆长C及摆角ψ,行程速度变化 系数K。 步骤:①计算 ②按已知条件画C1D、C2D ③连C1C2作∠ C1C2P=90°— ∠ C2C1P=90° ④作C1.C2.P的外接园 ⑤延长C1D、C2D与园交于C1′、C2′ ⑥在或上任取一点即可作A ⑦ AC1=b-a θ。说明此为曲柄与连杆共线的两位置) AC2=b+a 而AD即为机架长度d 由上述知A是可任选的,∴有无数解,若另有其他辅助条件,加给 定d或min或给定a等,则A点便可确定了。 若为曲柄滑块机构:则可由e在园上定A。 若为摆动导杆机构:由 在ψ角平分线上由d→A→B 3、按给定两连架杆对应位置设计(解析法、实验法) 例已知两连架杆AB和CD对应位置 取坐标系如图示,各构件长度在x、y轴上投影,得如下关系式
连杆曲线,用缩放仪求出图谱中的曲线与要求轨迹的相差倍数,将机构 尺寸作相应缩放,从而求得所需的四杆机构尺寸。 这种方法可使设计过程大为简化,适合于工厂和设计单位使用。
几组机构错位安装。 则用死点:例飞机起落架机构 连杆与从动件CD位于一直线上,机构处于死点。机轮着地时产生的 巨大冲击力不致使从动件CD转动,从而保持支撑状态。 又例如机床夹具。见22页图2-6 对其他四杆机构应会用同样方法分析以上四个特性。
§2-4 平面四杆机构的设计
基本问题:按给定的运动条件————确定运动简图的尺寸参数。 给定运动规律(位置、速度、加速度) 已知条件 给定运动轨迹 图解法: 直观 设计方法 解折法: 精确 应根据已知条件和机构具体情况选用 某 实验法: 简便 某种方法 一、按给定的运动规律设计四杆机构 1、按给定的连杆位置设计四杆机构(找圆心法) 已知连杆长度b及两位置B1C1、B2C2,设计该铰链四杆机构(定A、 D点)分析铰链四杆机构ABCD知: B1、B2、B3……应位于园弧k A上 C1、C2、C3……就位于园弧 k c上 作B1B2、B2 B3垂直平分线A C1C2、C2C3垂直平分成D 当给定两个位置时,只能得B1B2、C1C2,分别作其垂直平分线b12、 C12 A点可在b12上任选一点 ∴有无数解 D点可在C12上任选一点 在多解的情况下,可添加一些辅助条件,如满足有曲柄,紧凑的尺 寸,较好的传动角,固定铰链的位置等,从中选取满足附加条件的机 构。(如要求A、D水平) 当给定连杆三个位置时: 作B1B2中垂线 交点为A 作B2 B3中垂线 有唯一解ABCD 作C1C2中垂线 交点为D 作C2C3中垂线 2、按给定的行程速度变化系数K设计(三点共园法)
第2章 平面连杆机构
第2章平面连杆机构平面连杆机构是由若干构件通过低副联接而成的平面机构,也称平面低副机构。
平面连杆机构广泛应用于各种机械和仪表中,其主要优点是:(1)由于运动副是低副,面接触,传力时压强小,磨损较轻,承载能力较高;(2)构件的形状简单,易于加工,构件之间的接触由构件本身的几何约束来保持,故工作可靠;(3)可实现多种运动形式及其转换,满足多种运动规律的要求;(4)利用平面连杆机构中的连杆可满足多种运动轨迹的要求。
主要缺点有:(1)由于低副中存在间隙,机构不可避免地存在着运动误差,精度不高,(2)主动构件匀速运动时,从动件通常为变速运动,故存在惯性力,不适用于高速场合。
平面机构常以其组成的构件(杆)数来命名,如由四个构件通过低副联接而成的机构称为四杆机构,而五杆或五杆以上的平面连杆机构称为多杆机构。
四个机构是平面连杆机构中最常见的形式,也是多杆机构的基础。
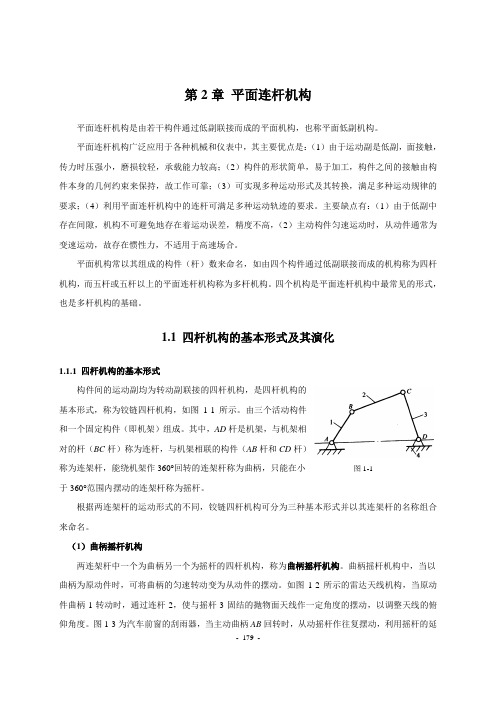
1.1 四杆机构的基本形式及其演化1.1.1 四杆机构的基本形式构件间的运动副均为转动副联接的四杆机构,是四杆机构的基本形式,称为铰链四杆机构,如图1-1所示。
由三个活动构件和一个固定构件(即机架)组成。
其中,AD杆是机架,与机架相对的杆(BC杆)称为连杆,与机架相联的构件(AB杆和CD杆)称为连架杆,能绕机架作360°回转的连架杆称为曲柄,只能在小图1-1于360°范围内摆动的连架杆称为摇杆。
根据两连架杆的运动形式的不同,铰链四杆机构可分为三种基本形式并以其连架杆的名称组合来命名。
(1)曲柄摇杆机构两连架杆中一个为曲柄另一个为摇杆的四杆机构,称为曲柄摇杆机构。
曲柄摇杆机构中,当以曲柄为原动件时,可将曲柄的匀速转动变为从动件的摆动。
如图1-2所示的雷达天线机构,当原动件曲柄1转动时,通过连杆2,使与摇杆3固结的抛物面天线作一定角度的摆动,以调整天线的俯仰角度。
图1-3为汽车前窗的刮雨器,当主动曲柄AB回转时,从动摇杆作往复摆动,利用摇杆的延长部分实现刮雨动作。
平面连杆机构ppt课件

3.1 平面连杆机构的类型
(2)应用案例:雷达天线、脚踏式脱粒机、搅拌 机、水稻插秧机的秧爪运动机构。
脚踏式脱粒机
缝纫机的脚踏粒机
雷达天线
16
3.1 平面连杆机构的类型
水稻插秧机的秧爪运动机构
搅拌机机构
(3)功能:将连续转动转换为摆动,或者将摆动转换为 连续转动。
17
3.1 平面连杆机构的类型
2、双曲柄机构 (1)概念:具有两个曲柄的铰链四杆机构,称 为双曲柄机构。
18
3.1 平面连杆机构的类型
(2)应用案例:惯性筛机构
惯性筛机构
(3)功能:将等速转动转换为不等速同向转动19。
3.1 平面连杆机构的类型
(4)双曲柄机构的其他类型 1)平行四边形机构:两相对构件互相平行,
呈平行四边形的双曲柄机构。
3.2.1 曲柄滑块机构 ( 1)由曲柄摇杆机构,将CD→无穷大,C点轨迹变成直
线; ( 2)演化方法:将转动副→移动副; ( 3)类型: a.偏心曲柄滑块机构 ,e≠0 偏距:曲柄转动
中心距导路的距离。 b.对心曲柄滑块机构,e=0
35
3.2 铰链四杆机构的演化
(4)应用案例:内燃机、空气压缩机、冲床和送料 机构等。
请画出下列机构运动示意图,并判断由几种机构 组合而成?
插齿机
冲床机构
48
3.3 铰链四杆机构的基本特性
3.3.1 急回特性和行程数比系数 1、基本概念:(以曲柄摇杆机构为例,曲柄为原动
件) (1)四杆机构的极限位置:当曲柄与连杆二次共线时,
摇杆位于机构的最左或最右的位置。 (2)极位夹角(θ):从动件处于二个极限位置时,
1-偏心轮 2-连杆 3-滑块 4-机架
0 第2章 (1-6) 平面连杆机构
平面四杆机构的基本特性 3. 度过死点位置的方法
采用错位排列地方式顺利地通过死点位置
增大从动件的质量、利用惯性度过死点位置
平面多杆机构简介
前面我们学了基本机构 ,可以根据基本机构的功能, 进行组合以及机构的演化及变异原理创新设计出丰富多彩 的多杆机构。 1. 扩大从动件的行程 冷床运输机就是一个六 杆机构。它用于把热轧 钢料在运输过程中冷却, 因此要求增大行程,该 机构由曲柄摇杆机构 ABCD和杆EF、滑块6所 组成。显然滑块6的行程 S比曲柄摇杆机构ABCD 中C点的行程要大的多。
铰链四杆机构的基本形式及其演化
2. 取不同的构件为机架
当以不同的构件作为机 架时,将得到不同类型 的机构。
以构件1为机架时, 为曲柄滑块机构。
以构件2为机架时, 为回转导杆机构。
以构件3为机架时, 为摇块机构。
以构件4为机架时, 为移动导杆机构。
铰链四杆机构的基本形式及其演化 手摇唧筒
铰链四杆机构的基本形式及其演化
➢ 本章主要介绍平面四杆机构的类型及应用、特性、设 计方法。
铰链四杆机构的基本形式及其演化
一、四杆机构的基本型式
根据连架杆运动形式的不同,可分为三种基本形式:
1. 曲柄摇杆机构—在两连架杆中,一个为曲柄,另一个为
摇杆。
➢ 运动特点:
一般曲柄主动,将连 续转动转换为摇杆的 摆动,也可摇杆主动, 曲柄从动。
铰链四杆机构的基本形式及其演化 平行双曲柄机构
应用:应用于从动件需要和主动件保持同步的场合。 举例:机车车轮的联动机构
机车车轮联动机构
铰链四杆机构的基本形式及其演化 3. 双摇杆机构—两连杆架均为摇杆的四杆机构
第2章 平面连杆机构
曲 柄 摇 杆 机 构
急回特性 摇杆在空回行程中的平均速度大于工作行程的 平均速度的特性。 平均速度的特性。 行程速度变化系数K(或称行程速比系数) 行程速度变化系数 (或称行程速比系数) 从动件在空回行程中的平均速度与工作行程中 的平均速度之比值。 的平均速度之比值。
K −1 θ = 180 K +1
缝纫机踏板机构
2.双曲柄机构 双曲柄机构
具有两个曲柄的铰链四杆机构称为双曲柄机构。 具有两个曲柄的铰链四杆机构称为双曲柄机构。 两个曲柄的铰链四杆机构称为双曲柄机构
原动件: 原动件 匀速转动) 主动曲柄 (匀速转动 匀速转动 从动件: 从动件 变速转动) 从动曲柄 (变速转动 变速转动
应用实例: 应用实例
当以最短杆的相邻杆为机架时, 当以最短杆的相邻杆为机架时,必为曲柄摇 杆机构; 杆机构; 当以最短杆为机架时,必为双曲柄机构; 当以最短杆为机架时,必为双曲柄机构; 当以最短杆的对面杆为机架( 当以最短杆的对面杆为机架(最短杆为连 必为双摇杆机构。 杆) 时,必为双摇杆机构。
实验与思考
平面四杆机构的演化
死点
消除死点位置的不利影响的措施 安装飞轮,加大从动件惯性; 安装飞轮,加大从动件惯性; 采用错列机构。 采用错列机构。
飞 轮
错列机构
死点
死点位置的利用
飞机起落架机构
2.4 平面四杆机构的运动设计
两类基本问题 按给定从动件的运动规律设计四杆机构 按给定运动轨迹设计四杆机构 三种设计方法 图解法 实验法 解析法
曲柄移动导杆机构
双滑块机构
曲柄移动导杆机构(正弦机构) 曲柄移动导杆机构(正弦机构)的演化 (2)双滑块机构 (2)双滑块机构 应用实例
椭 圆 仪
第2章 平面连杆机构02——自由度
性桁架,因而不能成为机构。
5)超静定桁架
n=3 PL=5 PH=0 F=3n-2PL-PH=3×3-2×5-0=-1 表明该运动链由于约束过多,已成为超静定桁架 了,也不能成为机构。
计算实例 实例1: 解:n = 3, PL = 4, PH = 0 F = 3n - 2PL - PH =3×3 - 2×4 - 0
3ቤተ መጻሕፍቲ ባይዱ
2 1 4
n=3 PL=4 PH=0
F=3n-2PL-PH=3×3-2×4-0=1 2)五杆机构: n=4 PL=5 PH=0 F=3n-2PL-PH=3×4-2×5-0=2 3)凸轮机构: n=2 PL=2 PH=1 F=3n-2PL-PH=1
4 3
2
1 5
4)刚性桁架
n=2 PL=3 PH=0 F=3n-2PL-PH=3×2-2×3-0=0 表明该运动链中各构件间已无相对运动,只构成了一个刚
2、约束
但当这些构件之间以一定的方式联接起来成为构件系 统时,各个构件不再是自由构件。——自由度减少。
这种对构件独立运动所施加的限制称为约束。
3、自由度和约束的关系 运动副每引入一个约束,构件就失去一个自由度。 运动副既限制了两构件的某些相对运动,又允许构件 间有一定的相对运动。
二、平面机构的自由度计算
惯性筛机构
F=3n-2PL-PH
=3×5-2×7-0
=1
2.局部自由度
个别构件所具有的,不影响整个机构运动的自由度称为 局部自由度。 典型例子:滚子的转动自由度并不影响整个机构的运 动,属局部自由度。 计入局部自由度时 n = 3, PL = 3, PH = 1 F =3×3 - 2×3- 1 =2 与实际不符
=1
实例2: n =5, PL = 7, PH = 0 解: F = 3n – 2PL – PH = 3×5 – 2×7 – 0
机械设计基础第二章平面连杆机构
(4)AC1=L2-L1, AC2=L2+L1→ L1=1/2(AC2-AC1)
→无数解
以L1为半径作圆,交B1,B2点 →曲柄两位置
M
N
在圆上任选一点A
C1M与C2N交于P点
作∠C1C2N=90-θ,
P
2.导杆机构: P.33
→取决于机构各杆的相对长度
A
D
B
B’
B”
C
C’
C”
三式相加 → ┌ l1≤l2 │ l1≤l3 └ l1≤l4
当杆1处于AB ”位置→ △AC ”D
→ l1+l2≤l3+l4 (2-3)
→┌(l2-l1) +l3 ≥l4 →┌l1+l4≤l2+l3 (2-1) └(l2-l1) +l4 ≥l3 └l1+l3≤l2+l4 (2-2)
图2-4
曲柄摇杆机构
φ1
φ2
ψ
(2-4)
(二)压力角和传动角 P.30
1.压力角α-
2.传动角γ
:BC是二力杆,驱动 力F 沿BC方向
作用在从动件上的驱动力F与该力作用点绝对速度VC之间所夹的锐角。
工作行程: 空回行程:
B2→B1 (φ 2) →摇杆C2→C1 (ψ) ∵ φ 1> φ 2 , 而ψ不变
B1→B2 (φ1) → 摇杆C1→C2 (ψ)
→ 工作行程时间>空回行程时间
曲柄(主)匀速转动(顺) 摇杆(从)变速往复摆动
图2-4
曲柄摇杆机构
φ1
φ2
ψ
极位:
缺点:
2.应用:
优点
1.手动冲床: ← 两个四杆机构组成 (双摇杆~+摇杆滑 块机构)
2.筛料机构: 六杆机构←两个四杆 机构组成(双曲柄~ +曲柄滑块~)
第二章 平面连杆机构(基础)
本章着重介绍平面四杆机构的基本类型、特性及其常用的设计方法。
铰链四杆机构:
1.压力角 不计摩擦时,作用在从动件上的驱动力F与该力作用点绝对速度Vc 之间所夹的锐角α称为压力角。 有效分力: Ft=Fcosα
即压力角α↓→有效分力Ft↑ 故压力角可作为判断机构传动性 能的标志。
1.压力角
2.传动角γ 压力角的余角γ (即连杆和从动摇杆之间所夹的锐角)。
因γ=90°-α,所以α↓→γ↑ 机构传力性能越好; 反之,α↑→γ↓,机构传力越费劲, 转动效率越低。 机构运转时,传动角γ是变化的,为了保证机构正常工作, 必须规定最小传动角γmin的下限。 一般机械:γmin≥40°;
§2-4 平面四杆机构的设计
一、按照给定的行程速度变化系数设计四杆机构 第三步:求曲柄转轴A的位置 (1)连接C1和C2,并作C1M垂直于C1C2。
(2)作∠ClC2N=90°-θ,C2N与C1M 相交于P点,由图可见,∠C1PC2=θ。
(3)作△PC1C2的外接圆,在此圆周(C1C2和GF除外)上任取一点A作 为曲柄的固定铰链中心。 连AC1和AC2,因同一圆弧的圆周角相等,故 ∠C1AC2=∠C1PC2=θ。
2.死点位置 对曲柄摇杆机构,以摇杆3为原动件, 曲柄1为从动件,则摇杆摆到极限位置 C1D和C2D时,连杆2与曲柄1共线。 若不计各杆的质量,则连杆加给曲柄 的力将过铰链中心A。此力对A点不产 生力矩,不能使曲柄转动。 机构的这种位置称为死点位置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中山市建斌中等职业技术学校—
五、平面四杆机构的基本特性
• 3、存在死点 • 当连杆与丛动件处于
共线位置时。 • 对传动来说死点是有
害的,可以通过安装 飞轮等方法克服。 • 也有机构利用死点工 作的,如钻床夹具等。
钻床夹具
中山市建斌中等职业技术学校—
中山市建斌中等职业技术学校—
平面四杆机构的其他形式
内燃机简图
中山市建斌中等职业技术学校—
中山市建斌中等职业技术学校—
铰链四杆机构的基本形式
• 动画演示 • 若连架杆能做整周运动,则称为曲柄; • 若只能往复摆动一个角度,则称为摇杆。
中山市建斌中等职业技术学校—
1、曲柄摇杆机构
• 其中两连架杆一为曲柄另一为摇杆;
应用实例
切割机
中山市建斌中等职业技术学校—
3、双摇杆机构
• 其中两连架杆均为摇杆。
应用实例
中山市建斌中等职业技术学校—
中山市建斌中等职业技术学校—
铰链四杆机构曲柄存在的条件
曲 柄 存 在 的 条 件 : (1)最 短 杆 与 最 长 杆 长 度 之 和 小 于 或 等 于 其 余 两 杆 长 度 和 。 (2)最 短 杆 是 连 架 杆 或 机 架 。
You Know, The More Powerful You Will Be
Thank You
在别人的演说中思考,在自己的故事里成长
Thinking In Other People‘S Speeches,Growing Up In Your Own Story
讲师:XXXXXX XX年XX月XX日
五、平面四杆机构的基本特性
• 1、急回运动特性 • 当曲柄均匀旋转时,
从动件作急回运动。 • 如牛头刨床的导杆
机构等。 • 有无急回等性取决
于急回特性系数K, K与极位夹角有关
中山市建斌中等职业技术学校—
五、平面四杆机构的基本特性
• 2、传动角越大,传 动性能越好。
- • 传动角=900 压力角
• 动画解说
• 1、曲柄滑块机构 a)滑块移动距离等于
曲柄长度的2倍 b)运动形成(视) c)应用 1,曲柄作主动件 (压力机) 2、滑块作主动件 (单缸内燃机)
应用实例
Байду номын сангаас
中山市建斌中等职业技术学校—
中山市建斌中等职业技术学校—
下列机构分别为什么机构
C
3
C
3
C
3
C
3
2
2
2
2
4
4
4
4
B
B
B
B
1A
1A
1A
1A
(a)
应用实例
中山市建斌中等职业技术学校—
中山市建斌中等职业技术学校—
2、双曲柄机构
• 其中两连架杆均为曲柄;
当连杆与机架相等 并两曲柄长度相等 有:
1、平行四边形机 构——方向相同, 角速度相等
2、反相双曲柄机 构——方向相反, 角速度不相等
应用实例 视频
中山市建斌中等职业技术学校—
中山市建斌中等职业技术学校—
平面连杆机构
中山市建斌中等职业技术学校—
中山市建斌中等职业技术学校—
平面连杆机构基本概念
• 平面连杆机构——由一些刚性构件用转动副和移动副 相互连接而组成的在同一平面或相互平行平面内运动 的机构。
• 四杆机构——四个构件的低副机构 • 平面铰链四杆机构——构件间用四个转动副相连的平
面四杆机构。(简称铰链四杆机构)
推论: (1)若四杆机构中最短杆与最长杆之和小于或等于其余两 杆长度之和,则:
取最短杆为连架杆——曲柄摇杆机构 取最短杆是机架 ——双曲柄机构 取最短杆是连杆 ——双摇杆机构 (2)若四杆机构中最短杆与最长杆之和大于其余两 杆长 度之和,则无曲柄存在,此四杆机构只能是双摇杆机构
中山市建斌中等职业技术学校—
(b)
( c)
( d)
曲柄滑块机构 转动导杆机构 摆动导杆机构 移动导杆机构
中山市建斌中等职业技术学校—
平面四杆机构的其他形式
• 2、导杆机构 a)概念: 导杆与导杆 机构 b)类型: 1转动导杆机构 2摆动导杆机构 3移动导杆机构
写在最后
经常不断地学习,你就什么都知道。你知道得越多,你就越有力量 Study Constantly, And You Will Know Everything. The More