2019年第12章SIMULINK入门.ppt
simulink 入门
打开与关闭模型 保存模型 打印与拷贝模型 模型属性与注释
实时系统与硬件设计
Simulink Fixed Point Real-Time Windows Target xPC Target xPC Target Embedded Option Simulink HDL Coder Simulink PLC Coder Instrument Control Toolbox Video and Image Processing Blockset
2. Simulink建模的基础知识
Math Operations (数学模块库)
Abs & Sign :绝对值与符号函数 add & Sum:加减 Product & Divide:乘除 MinMax:最值运算 Gain:增益 Slider Gain:滑动增益 Math Function:数学函数 Trigonometric Function:三角函数 复数运算 取整运算 …
2. Simulink建模的基础知识
Discrete (离散模块库)
Discrete-time Integrator:离散积分 Discrete Derivative:离散微分 Discrete Filter:离散滤波器 Discrete PID Controller:离散PID控制器 Discrete Transfer Fcn:离散传递函数模型 Discrete Zero-Pole:离散零极点传递函数模型 Discrete State-Space:离散状态空间模型 First-Order Hold:一阶采样保持器 Zero-Order Hold:零阶采样保持器 Unit Delay:一个采样周期的延时 Memory:存储器 …
2019年第12章SIMULINK入门.ppt

12.1 SIMULINK基础
• 本节主要介绍SIMULINK的安装、启动,以及 SIMULINK工作界面和SIMULINK模型基本构建方式, 目的是对SIMULINK有一个感性的认识。
12.1.1 SIMULINK安装
• SIMULINK是MATLAB的一个工具箱软件包,在 MATLAB的安装过程中,用户可以选择安装 SIMULINK。MATLAB有两种安装类型,如图所示, 一种是典型安装,另一种是自定义安装。
• 每个带有参数的模块都有一个模块参数对话框, 用户可以通过该对话框设置模块的参数,打开模 块参数对话框:
• 用鼠标双击模块图标,即可打开模块参数对话框;
12.4.6 改变模块效果
• 在SIMULINK中,用户可以制定任何模块或者标注 的前景色和背景色,也可以设定整个模型框图的 背景色。
• 改变模块或标注的前景色。选择要改变的模块或 标注,然后选择菜单栏【Format/Foreground color】选项设置。
12.1.5 模型窗口菜单栏
• 模型的建立是在模型窗口中实现的,其界面如图 所示,整个模型窗口由菜单栏、工具栏、编辑框 和状态栏组成。
12.1.6 模型窗口工具栏和状态栏
• 模型窗口工具栏如图。除Windows经典操作外,其 余按钮功能见表
按钮
功能 仿真启动或继 续 结束仿真
设置仿真结束 时间 选择仿真加速 模式 准备
12.5.1 显示信号属性
• Signal Dimensions
• 选择菜单栏【Format/Port/Signal Displays/ Signal Dimensions】选项,SIMULINK将在携带非 标量信号的信号线旁显示非标量信号的维数。信 号位数的显示格式,取决于信号线是单个信号还 是总线信号。如果信号线表示的是单个的向量信 号,SIMULINK将显示信号的宽度;如果信号线表 示的是单个矩阵信号,SIMULINK将显示信号维数 的格式为:[M×N],M、N非别是矩阵的行列数;如 果信号线表示携带相同数据类型的总线信号, SIMULINK将显示信号维数的格式为N{M},其中N是 总线所传输的信号数目,M是总线传输信号分量的 数目
《SIMULINK仿真基础》课件

SIMULINK仿真基础课程介绍,通过深入浅出的方式帮助学员掌握SIMULINK 的基本知识和仿真实践技巧。
课程大纲
SIMULINK基础知识
SIMULINK简介、软件界面介绍、模型的创 建方式、模型的保存和加载。
仿真方法与技巧
仿真参数设置、仿真停止方式、数据可视化 方法。
并实现控制和优化
项目仿真分析
学习仿真技巧,掌握仿真参数设置,能够 运用仿真进行系统分析、控制和优化。
通过实际案例学习,能够应用SIMULINK 进行电路、控制系统、机械系统和通信系 统的仿真分析。
模型建立流程
模型建立步骤、系统建模方法、模型参数设 置。
仿真应用案例
电路仿真实例、控制系统仿真实例、机械系 统仿真实例、通信系统仿真实例。
目标学员
1 工程师
具备一定仿真基础,希望深入学习SIMULINK并应用于实际工程项目的工程师。
2 科研人员
希望运用仿真技术进行科研工作的科研人员。
3 学生
对仿真技术和工程应用感兴趣的学生,尤其是自动化握SIMULINK的基础知识
2 熟练掌握SIMULINK模型建立流程
了解SIMULINK的特点、功能和基本操作, 掌握基本的建模方法。
学习模型建立的基本步骤,了解不同系统 的建模方法,并掌握模型参数设置。
3 能够运用SIMULINK进行仿真分析, 4 能够应用SIMULINK完成实际工程
Simulink 入门教程
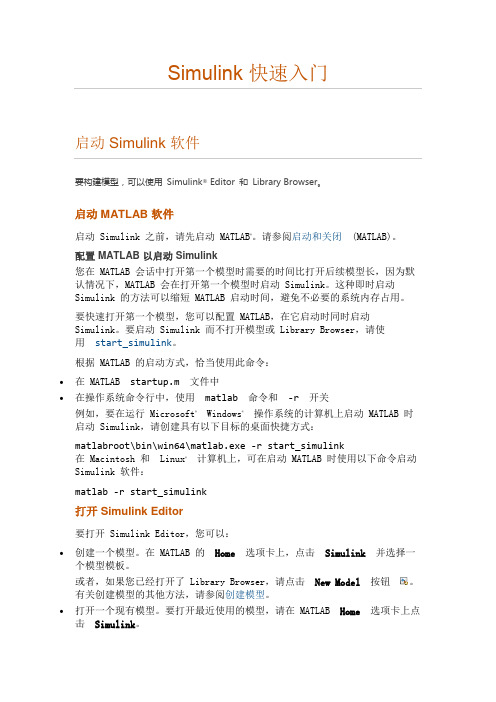
要构建模型,可以使用Simulink® Editor 和Library Browser。
启动 MATLAB 软件启动 Simulink 之前,请先启动 MATLAB®。
请参阅启动和关闭(MATLAB)。
配置 MATLAB 以启动 Simulink您在 MATLAB 会话中打开第一个模型时需要的时间比打开后续模型长,因为默认情况下,MATLAB 会在打开第一个模型时启动 Simulink。
这种即时启动 Simulink 的方法可以缩短 MATLAB 启动时间,避免不必要的系统内存占用。
要快速打开第一个模型,您可以配置 MATLAB,在它启动时同时启动 Simulink。
要启动 Simulink 而不打开模型或 Library Browser,请使用start_simulink。
根据 MATLAB 的启动方式,恰当使用此命令:∙在 MATLAB startup.m文件中∙在操作系统命令行中,使用matlab命令和-r开关例如,要在运行 Microsoft®Windows®操作系统的计算机上启动 MATLAB 时启动 Simulink,请创建具有以下目标的桌面快捷方式:matlabroot\bin\win64\matlab.exe -r start_simulink在 Macintosh 和Linux®计算机上,可在启动 MATLAB 时使用以下命令启动Simulink 软件:matlab -r start_simulink打开 Simulink Editor要打开 Simulink Editor,您可以:∙创建一个模型。
在 MATLAB 的Home选项卡上,点击Simulink并选择一个模型模板。
或者,如果您已经打开了 Library Browser,请点击New Model按钮。
有关创建模型的其他方法,请参阅创建模型。
∙打开一个现有模型。
要打开最近使用的模型,请在 MATLAB Home选项卡上点击Simulink。
Simulink入门教程
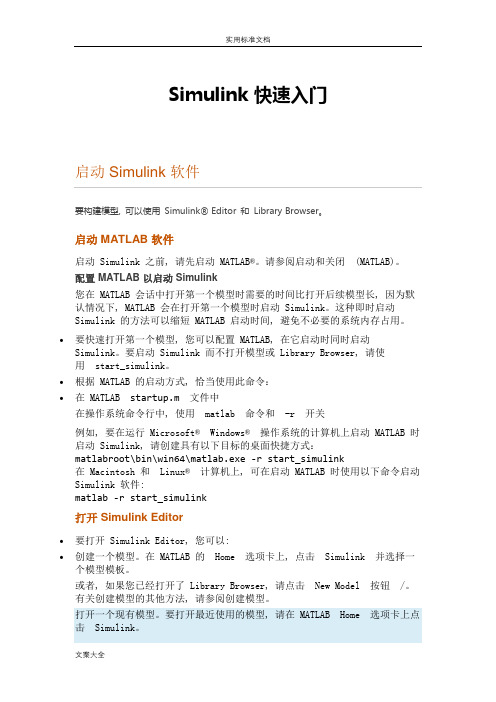
Simulink 快速入门要构建模型, 可以使用Simulink® Editor 和Library Browser。
启动 MATLAB 软件启动 Simulink 之前, 请先启动MATLAB®。
请参阅启动和关闭(MATLAB)。
配置 MATLAB 以启动 Simulink您在 MATLAB 会话中打开第一个模型时需要的时间比打开后续模型长, 因为默认情况下, MATLAB 会在打开第一个模型时启动 Simulink。
这种即时启动Simulink 的方法可以缩短 MATLAB 启动时间, 避免不必要的系统内存占用。
•要快速打开第一个模型, 您可以配置 MATLAB, 在它启动时同时启动Simulink。
要启动 Simulink 而不打开模型或 Library Browser, 请使用start_simulink。
•根据 MATLAB 的启动方式, 恰当使用此命令:•在 MATLAB startup.m文件中在操作系统命令行中, 使用matlab 命令和-r 开关例如, 要在运行Microsoft®Windows®操作系统的计算机上启动 MATLAB 时启动 Simulink, 请创建具有以下目标的桌面快捷方式:matlabroot\bin\win64\matlab.exe -r start_simulink在 Macintosh 和Linux®计算机上, 可在启动 MATLAB 时使用以下命令启动Simulink 软件:matlab -r start_simulink打开 Simulink Editor•要打开 Simulink Editor, 您可以:•创建一个模型。
在 MATLAB 的Home 选项卡上, 点击Simulink 并选择一个模型模板。
或者, 如果您已经打开了 Library Browser, 请点击New Model 按钮/。
有关创建模型的其他方法, 请参阅创建模型。
第12章matlab、simulink基础)simulink基础
尚 辅 教 学 配 套 课 件下篇第4章框图仿真软件平台Simulink与S-function基础在工程实际中,控制系统的结构往往很复杂,如果不借助专用的系统建模软件,则很难准确地把一个控制系统的复杂模型输入计算机,对其进行进一步的分析与仿真。
1990年,Math Works软件公司为MATLAB提供了新的控制系统模型图输入与仿真工具,并命名为SIMULAB,该工具很快就在控制工程界获得了广泛的认可,使得仿真软件进入了模型化图形组态阶段。
但因其名字与当时比较著名的软件SIMULA类似,所以1992年正式将该软件更名为SIMULINK。
SIMULINK的出现,给控制系统分析与设计带来了福音。
顾名思义,该软件的名称表明了该系统的两个主要功能:Simu(仿真)和Link(连接),即该软件可以利用鼠标在模型窗口上绘制出所需要的控制系统模型,然后利用SIMULINK提供的功能来对系统进行仿真和分析。
第一节SIMULINK简介一、什么是SIMULINK❑SIMULINK是MATLAB软件的扩展,它是实现动态系统建模和仿真的一个软件包,它与MATLAB语言的主要区别在于,其与用户交互接口是基于Windows的模型化图形输入,其结果是使得用户可以把更多的精力投入到系统模型的构建,而非语言的编程上。
❑所谓模型化图形输入是指SIMULINK提供了一些按功能分类的基本的系统模块,用户只需要知道这些模块的输入输出及模块的功能,而不必考察模块内部是如何实现的,通过对这些基本模块的调用,再将它们连接起来就可以构成所需要的系统模型(以.mdl文件进行存取),进而进行仿真与分析。
❑SIMULINK的最新版本是SIMULINK4.0(包含在MATLAB6.0 里),MATLAB5.3里的版本为3.0版,它们的变化不大。
二、SIMULINK的启动1、在MATLAB命令窗口中输入simulink结果是在桌面上出现一个称为Simulink Library Browser的窗口,在这个窗口中列出了按功能分类的各种模块的名称。
Simulink仿真基础 课件
即可。名称在功能模块上的位置也可以变换180度,可以用Format菜 单中的Flip Name来实现,也可以直接通过鼠标进行拖曳。Hide Name可以隐藏模块名称。 ▪ 7)颜色设定:Format菜单中的Foreground Color可以改变模块的前景 颜色,Background Color可以改变模块的背景颜色;而模型窗口的颜 色可以通过Screen Color来改变。
户设置仿真的开始和结束时间,选择解法器,说 明解法器参数及选择一些输出选项。Workspace I/O页,作用是管理模型从MATLAB工作空间的输 入和对它的输出。Diagnostics页,允许用户选择 Simulink在仿真中显示的警告信息的等级。
▪ 仿真结果保存与分析采用SCOPE模块和其 他的画图模块,在仿真进行的同时,就可 观看到仿真结果。除此之外,用户还可以 在改变参数后来迅速观看系统中发生的变 化情况。仿真的结果还可以存放到 MATLAB的工作空间里做事后处理。
Variable Transport Delay:输入信号延时一 个可变时间再输出
▪ 简单模型的建立
▪ (1)建立模型窗口
▪ (2)将功能模块由模块库窗口复制到模 型窗口
▪ (3)对模块进行连接,从而构成需要的 系统模型
▪ 模型的特点
▪ 在SIMULINK里提供了许多如Scope的接 收器模块,这使得用SIMULNK进行仿真具 有像做实验一般的图形化显示效果。
进行以下的基本操作。 ▪ 1)移动:选中模块,按住鼠标左键将其拖曳到所需的位置即可。若要脱离线
而移动,可按住shift键,再进行拖曳。 ▪ 2)复制:选中模块,然后按住鼠标右键进行拖曳即可复制同样的一个功能模
2019年-SIMULINK仿真参数的设置-PPT精选文档
4) 仿真精度的定义(对于变步长模式)
a) Relative tolerance(相对误差):它是指误差相对于状态的值,是一个 百分比,缺省值为1e-3,表示状态的计算值要精确到0.1%。
b) Absolute tolerance(绝对误差):表示误差值的门限,或者是说在状 态值为零的情况下,可以接受的误差。如果它被设成了auto,那么 simulink为每一个状态设置初始绝对误差为1e-6。
d) ode15s:是一种基于数字微分公式的解法器(NDFs)。也是一种多步 解法器。适用于刚性系统,当用户估计要解决的问题是比较困难的, 或者不能使用ode45,或者即使使用效果也不好,就可以用ode15s。
e) ode23s:它是一种单步解法器,专门应用于刚性系统,在弱误差允 许下的效果好于ode15s。它能解决某些ode15s所不能e5,ode4,ode3,ode2,ode1和discrete。 a) ode5:缺省值,是ode45的固定步长版本,适用于大多数连续或离散系
统,不适用于刚性系统。
b) ode4:四阶龙格-库塔法,具有一定的计算精度。 c) ode3:固定步长的二/三阶龙格-库塔法。 d) ode2:改进的欧拉法。 e) ode1:欧拉法。 f) discrete:是一个实现积分的固定步长解法器,它适合于离散无连续状
2) 仿真步长模式:用户在Type后面的第一个下拉选项框中指定仿真的步 长选取方式,可供选择的有Variable-step(变步长)和Fixed-step(固 定步长)方式。变步长模式可以在仿真的过程中改变步长,提供误差 控制和过零检测。固定步长模式在仿真过程中提供固定的步长,不提 供误差控制和过零检测。用户还可以在第二个下拉选项框中选择对应 模式下仿真所采用的算法。
simulink入门教程
simulink⼊门教程S i m u l i n k⼊门教程-CAL-FENGHAI.-(YICAI)-Company One1Simulink?快速⼊门启动Simulink软件要构建模型,可以使⽤ SimulinkEditor 和 Library Browser。
启动MATLAB软件启动 Simulink 之前,请先启动 MATLAB。
请参阅启动和关闭(MATLAB)。
配置MATLAB以启动Simulink您在 MATLAB 会话中打开第⼀个模型时需要的时间⽐打开后续模型长,因为默认情况下,MATLAB 会在打开第⼀个模型时启动 Simulink。
这种即时启动Simulink 的⽅法可以缩短 MATLAB 启动时间,避免不必要的系统内存占⽤。
要快速打开第⼀个模型,您可以配置 MATLAB,在它启动时同时启动 Simulink。
要启动 Simulink ⽽不打开模型或 Library Browser,请使⽤?start_simulink。
根据 MATLAB 的启动⽅式,恰当使⽤此命令:在 MATLAB?⽂件中在操作系统命令⾏中,使⽤matlab命令和-r开关例如,要在运⾏ MicrosoftWindows操作系统的计算机上启动 MATLAB 时启动Simulink,请创建具有以下⽬标的桌⾯快捷⽅式:matlabroot\bin\win64\ -r start_simulink在 Macintosh 和?Linux计算机上,可在启动 MATLAB 时使⽤以下命令启动Simulink 软件:matlab -r start_simulink打开SimulinkEditor要打开 Simulink Editor,您可以:创建⼀个模型。
在 MATLAB 的?Home选项卡上,点击Simulink并选择⼀个模型模板。
或者,如果您已经打开了 Library Browser,请点击?New Model按钮。
有关创建模型的其他⽅法,请参阅创建模型。
simulink教程PPT课件
第32页/共187页
2.图形化模型的仿真过程
Simulink的仿真过程包括如下几个阶段: ➢ 模型编译阶段; ➢ 连接阶段; ➢ 仿真环阶段。
第33页/共187页
(1)模型编译阶段 Simulink引擎调用模型编译器,将模型编译成可执行文件。 编译器完成以下任务:
第16页/共187页
【Edit】菜单
第17页/共187页
3.【View】菜单
【View】菜单中部分主要选项的名称与功能如下表所示。
【View】菜单
第18页/共187页
第19页/共187页
4.【Simulation】菜单
【Simulation】菜单如下图所示。
第20页/共187页
【Simulation】菜单各选项的功能如下 : ➢ 【Start】:开始运行仿真; ➢ 【Stop】:停止仿真; ➢ 【Configuration Parameters】:设置仿真参数和选择解法器; ➢ 【Normal】、【Accelerator】、【External】分别表示正常工作模式、加
1.图形化模型与数学模型间的关系 2.图形化模型的仿真过程
第30页/共187页
1.图形化模型与数学模型间的关系
现实中每个系统都有输入、输出和状态3个基本要素,以及它们之间随时间 变化的数学函数关系,即数学模型。
第31页/共187页
图形化模型也体现了输入、输出和状态间随时间变化的某种关系,如下图所 示。
续表
第70页/共187页
下表汇总了Simulink对直线进行操作的部分方法。
对直线进行操作
第71页/共187页
双击模块将会弹出【参数设置】对话框,如下图所示的增益模块,进而设置 参数值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 用鼠标双击模块图标,即可打开模块参数对话框;
12.4.6 改变模块效果
• 在SIMULINK中,用户可以制定任何模块或者标注 的前景色和背景色,也可以设定整个模型框图的 背景色。
• 改变模块或标注的前景色。选择要改变的模块或 标注,然后选择菜单栏【Format/Foreground color】选项设置。
12.3.1 常用的Commonly Used Blocks子库
• 在Commonly Used Blockset库中列出了公共库 Simulink中最常用、最简单的模块,
12.3.2 常用的Sourse子库
• 信号是仿真模型中不可缺少的一部分,Sourse库 用来向模型提供信号。Sourse模块是一个没有输 入端口,而至少有一个输出端口的模块,
• 1.定步长连续算法
• 2.定步长离散算法
• 3.变步长连续算法
• 4.变步长离散算法
12.6.4 从基本工作区载入数据
• 在Configuration Parameter(参数配置)对话框 左侧单击Data Inport/Export选项,在右侧将显 示Data Inport/Export面板,该面板包括从基本 工作区载入数据(Load from workspace)面板、 从基本工作区载入数据(Save to workspace)面 板和保存选项(Save options)面板。
• 改变模块或标注的背景色。选择要改变的模块或 标注,然后选择菜单栏【Format/Background color】选项设置。
• 显示模块阴影效果。选中要添加阴影的模块,选 择菜单栏【Format/Show Drop Shadow】选项来为 选中模块添加阴影效果。
12.5 信号的操作
• 信号操作是模型中的一个重要内容,正确处理模 型信号对于仿真结果的准确性和模型的可读性都 具有重要意义,接下来将介绍信号的一些基本概 念以及如何实现信号的标量扩展、显示和传递。
12.5.1 显示信号属性
• Signal Dimensions
• 选择菜单栏【Format/Port/Signal Displays/ Signal Dimensions】选项,SIMULINK将在携带非 标量信号的信号线旁显示非标量信号的维数。信 号位数的显示格式,取决于信号线是单个信号还 是总线信号。如果信号线表示的是单个的向量信 号,SIMULINK将显示信号的宽度;如果信号线表 示的是单个矩阵信号,SIMULINK将显示信号维数 的格式为:[M×N],M、N非别是矩阵的行列数;如 果信号线表示携带相同数据类型的总线信号, SIMULINK将显示信号维数的格式为N{M},其中N是 总线所传输的信号数目,M是总线传输信号分量的 数目
• 当选择菜单栏【File\Print Detail】选项时,将 打开Print Details对话框,在File Location/naming options选项组中有三个单选按 钮,用来设置生成HTML文档的保存路径。
12.2.3 生成模型报告
12.3 常用模型库
• SIMULINK库浏览器窗口呈现一种树状结构,在其 中列出了SIMULINK中的所有模块库,大体分为公 共库和专业库,如Simulink库、Aerospace Blockset库等。本节将介绍最常用的Simulink库 中的一些子库,SIMULINK的模块是繁多的,仅仅 靠这里的介绍是不够的,详细的了解可以参照 Help文档。
12.2.2 打印模型
• All systems:打印模型中的所有系统,同时将点 亮下面的Look under mask dialog和Expand
unique library links复选框。
12.2.3 生成模型报告
• SIMULINK模型报告是一个描述模型结构和内容的 HTML文档,其包含了模型方框图、子系统和模块 参数的设置。
• Current system:只打印当前系统。
• Current system and above:打印当前系统和该 系统之上的所有父系统。
• Current system and below:打印当前系统和该 系统之下的所有子系统,同时将点亮下面的Look under mask dialog和Expand unique library links复选框。
12.1.2 SIMULINK启动
• 启动SIMULINK之前,首先要打开MATLAB,打开 MATLAB主界面,在命令窗口(Command Window) 输入命令simulink,回车即可启动SIMULINK,即 打开SIMULINK库浏览器(Simulink Library Browser)窗口,如图所示。
[3x3]
[3x3] double [3x3] Constant1
double
Sine Wave
Scope1
2{10} 2{10}
double <signal1> double [3x3] <signadouble
Gain
Scope
12.6 仿真设置
• 接下来将介绍SimulinkParameters对话框中基本 参数的设置方式。SimulinkParameters对话框中 仿真参数主要包括,解法器设置(Solver)、仿 真参数输入输出(Data Import/Export)、仿真 优化(Optimization)、仿真诊断 (Diagnostics)、仿真硬件实现(Hardware Implementation)、参考模型(Model Referencing) 和实时工作间(Real-time workshop)。在模型窗 口中选择菜单栏【Simulation/Configuration Parameter】,就可以打开Configuration Parameter(参数配置)对话框,
• 2.从信号线某一点到模块的手动连接
• 将鼠标移动到信号线上某一点,此时鼠标图标变 为十字符型,其后的连接方式完全与从模块到模 块的连接相同。这种连接方式可以将一个信号传 递到多个模块,
12.4.3 变换模块方向
• 在默认状态下,模块的输入端在左、输出端在右。 在模型的实际设计中,用户可以根据需要对模块 进行旋转。旋转的方式有两种:
产生RTW代码
按钮
功能
模型框图修改 后的一致化
打开库浏览器 查窗口
打开或隐藏模 型资源管理器
切换模型单双 窗口外形
显示当前子系 统的父系统
启动 SIMULINK的 调试器
12.2 SIMULINK模型操作
• 介绍有关模型的基本操作,如模型的注释、打印、 编辑等,模型的注释能够让模型更加通俗易懂, 而模型报告的生成则增加了模型的阅读性,通过 这些操作能够使得模型更具有交互性。
第12章 SIMULINK入门
• SIMULINK是一个集建模、仿真和分析动态系统为 一体的软件,是一种基于MATLAB的图形设计环境。 通过SIMULINK,用户可以轻松地完成对应用问题 的仿真,并实时地观察可能出现的结果。
第12章 SIMULINK入门
• SIMULINK提供了一个建立模型方框图的图形用户 接口(GUI),模型的创建只需要单击和拖动鼠标 即可完成。SIMULINK中包含了许多实现不同功能 的模块库,使得用户在这种设计中,不必考虑模 块的内部结构而直接实现其“想要”的功能。同 时,在建立模型之后,用户可以直接进行一种 “交互式的”仿真,通过相关菜单或命令的使用 来执行仿真,使得用户能够按照自己的设定来进 行仿真并观察对应的结果。
12.1.5 模型窗口菜单栏
• 模型的建立是在模型窗口中实现的,其界面如图 所示,整个模型窗口由菜单栏、工具栏、编辑框 和状态栏组成。
12.1.6 模型窗口工具栏和状态栏
• 模型窗口工具栏如图。除Windows经典操作外,其 余按钮功能见表
按钮
功能 仿真启动或继 续 结束仿真
设置仿真结束 时间 选择仿真加速 模式 准备
12.4.4 操作模块名称
• 在SIMULINK模型中,每个模块都有自己唯一的模 块名。如果在同一系统中出现模块名的重复, SIMULINK将弹出一个Error对话框。
• 1.更改模块名称 • 2.移动模块名位置 • 3.显示或隐藏模块名 • 4.改变模块名的字体和大小
12.4.5 设置模块参数
• 使用快捷键Ctrl+R进行顺时针90°旋转,请注意 模块端口顺序的变化;
• 使用模型窗口菜单栏中【Format】菜单。选择菜 单栏【Format/Flip Block】选项,可将模块旋转 180°。选择【Format/Rotate Block】可将模块 旋转90°,与使用快捷键Ctrl+R效果相同。
12.3.3 常用的Sink子库
• 在Sink库中提供了模型和子系统输出模块、数据 查看模块和仿真控制模块。Sink库中各个模块的 功能如表所示。
12.4.1 自动连接模块
• 在模型的构建中要实现模块的连接,可以通过信 号线实现,信号线用一段带有箭头连线表示。通 过SIMULINK自动连接可以实现模块间的连接,也 可以通过手动实现从模块到模块的连接或者从信 号线到模块的连接。信号线带有箭头的一端连在 目标模块的输入端口,另一端连在输出模块的输 出端口上。首先介绍自动连接模块的方法。
12.5.1 显示信号属性
• 信号属性包括信号的线型、信号的维数和信号的 数据类型。在SIMULINK模型窗口的Format菜单栏 中提供了显示这些属性的以下不同选项。
• Wide Nonscalar Line • 选择菜单栏【Format/Port/Signal Displays/
Wide Nonscalar Line】选项,SIMULINK将加宽显 示模型中的非标量(向量或矩阵)信号线, • 总数;如果信号线表示携带不同数据类型的总线 信号,那么SIMULINK将只显示信号分量总数{M}。