CAN总线接口通讯实验
实验十三 CAN总线实验
1.2 CAN 总线技术的优点 使用 CAN 总线后,对其优点进行了总结,得出以下结论: 1) 如果数据扩展以增加新的信息,只需升级软件即可。 2) 控制单元对所传输的信息进行实时检测,检测到故障后存储故障码。 3) 使用小型控制单元及小型控制单元插孔可节省空间。 4) 使传感器信号线减至最少,控制单元可做到高速数据传输。 5) CAN 总线符合国际标准,因此可应用不同型号控制单元间的数据传输。
datanum = 8; loopnum = str.GetLength() / 8; if((str.GetLength() % 8) == 0) loopnum -= 1; temp = loopnum; while(loopnum >= 0){
for(int i = 0; i < datanum; i++) {
信息,而不分主从,通信方式灵活,且无需站地址等节点信息。利用这一点可方便地构 成多机备份系统。 CAN 网络上的节点信息分成不同的优先级,可满足不同的实时要求,高优先级的数据 最多可在 134us 内得到传输。 CAN 采用非破坏性总线性仲裁技术,当多个节点同时向总线发送信息时,优先级较低 的节点会主动地退出发送,而最高优先级的节点可不受影响地继续传输数据,从而大大 节省了总线冲突仲裁时间。尤其是在网络负载很重的情况下也不会出现网络瘫痪情况 (以太网则可能)。 CAN 只需通过帧滤波即可实现点对点、一点对多点及全局广播等几种方式传送接受数 据,无需专门的“调度”。 CAN 采用 NRZ 编码,直接通信距离最远可达 10km(速率 5kbps);通信速率最高可达 1Mbps(此时通信距离最长为 40m)。 CAN 上的节点数主要取决于总线驱动电路,目前可达 110 个;标示符可达 2032 种 (CAN2.0A),而扩展标准(CAN2.0B)的标示符几乎不受限制。 CAN 采用短帧结构,传输时间短,受干扰概率低,具有极好的检错效果,每帧信息都 有 CRC 效验及其他检错措施,保证数据出错率极低。 CAN 的通信介质可为双铰线、同轴电缆或光纤,选择灵活。 CAN 节点在错误严重的情况下具有自动关闭输出功能,以使总线上其他节点的操作不 受影响。
can总线实验报告

can总线实验报告
《CAN总线实验报告》
一、实验目的
本实验旨在通过对CAN总线的实验研究,掌握CAN总线的基本原理、工作方式和应用领域,提高学生对CAN总线技术的理解和应用能力。
二、实验内容
1. CAN总线基本原理的学习和理解
2. CAN总线的工作方式和通信协议的研究
3. CAN总线在汽车电子控制系统中的应用实例分析
4. CAN总线通信协议的实验验证
三、实验步骤
1. 通过文献资料和教材学习CAN总线的基本原理和工作方式
2. 使用CAN总线开发板进行实验,验证CAN总线的通信协议
3. 分析汽车电子控制系统中CAN总线的应用实例
4. 结合实际案例,对CAN总线通信协议进行实验验证
四、实验结果
通过本次实验,我们深入了解了CAN总线的基本原理和工作方式,掌握了CAN总线通信协议的实验验证方法,并对CAN总线在汽车电子控制系统中的应用有了更深入的了解。
实验结果表明,CAN总线作为一种高可靠性、高性能的通信协议,在汽车电子控制系统中具有广泛的应用前景。
五、实验结论
通过本次实验,我们对CAN总线的基本原理、工作方式和应用领域有了更深入
的了解,提高了对CAN总线技术的理解和应用能力。
同时,我们也认识到了CAN总线在汽车电子控制系统中的重要作用,为今后的学习和研究打下了坚实的基础。
综上所述,本次实验取得了良好的实验效果,为我们进一步深入研究CAN总线技术奠定了坚实的基础。
希望通过今后的学习和实践,能够更好地应用CAN总线技术,为汽车电子控制系统的发展做出更大的贡献。
CAN总线实验报告
实验三:双节点通信1、实验要求CAN节点A(ID:0x00)、B(ID:0x01),要求A节点进行数据发送(标准数据帧),B节点可以进行数据接收并显示接收到数据,同时反馈信息给A节点。
2、实验目的(1)熟悉双CAN通信原理;(2)掌握双节点通信的设计。
3、所需设备(1)CPU挂箱2(2)接口挂箱2(3)CPU模块(80C31)2(4)CAN总线模块2块4、实验内容两个实验台运行程序CAN.ASM,发送实验台全速运行程序,接收实验台要在程序中设置断点,查看30H~37H中的数与程序中发送的数据是否一致。
5、实验原理两个CAN节点通信,验收滤波设置正确后,可实现双节点通信。
硬件原理图与图2.4类似,只不过将1个节点改为2个节点。
图略。
附图2.4见下(2)模块跳线接LCS0(CAN基址为0xDE00);(3)模块上的A接CANL,B接CANH;(4)在各自试验台上,将CPU挂箱右侧的“DATA PORT”和“ADDRESS PORT”分别用5P、14P、20P连线与接口挂箱的相应插座连接.(5)将两个CAN节点的CANL、CANH直连。
2、运行程序CAN.ASM,在初始化结束、发送接收结束处各设置断点,查看两个模块的30H~37H中的数据是否一致。
7、实验结果两个模块的30H~37H中的数据一致。
8、1)程序流程图2)实验程序:MODE EQU 0DE00H ;模式寄存器CMR EQU 0DE01H ;命令寄存器SR EQU 0DE02H ;状态寄存器IR EQU 0DE03H ;中断寄存器IER EQU 0DE04H ;中断使能寄存器BTR0 EQU 0DE06H ;总线定时寄存器一BTR1 EQU 0DE07H ;总线定时寄存器二OCR EQU 0DE08H ;输出控制寄存器ALC EQU 0DE0BH ;仲裁丢失捕捉寄存器ECC EQU 0DE0CH ;错误代码捕捉寄存器TXERR EQU 0DE0FH ;发送错误计数器ACR0 EQU 0DE10H ;验收代码寄存器0ACR1 EQU 0DE11H ; 1ACR2 EQU 0DE12H ; 2ACR3 EQU 0DE13H ; 3AMR0 EQU 0DE14H ;验收屏蔽寄存器0AMR1 EQU 0DE15H ; 1AMR2 EQU 0DE16H ; 2AMR3 EQU 0DE17H ; 3FIN EQU 0DE10H ;发送/接收帧信息ID1 EQU 0DE11H ;发送/接收缓冲区之标示符一ID2 EQU 0DE12H ;发送/接收缓冲区之标示符二DATA1 EQU 0DE13H ;发送/接收数据首址RBSA EQU 0DE1EH ;接收缓冲器起始地址寄存器CDR EQU 0DE1FH ;时钟分频寄存器ORG 4000HJMP STARTORG 4080HSTART: MOV R1,#8MOV R0,#27HFILL: MOV B,#10HMOV A,R1MUL ABMOV @R0,ADEC R0DJNZ R1,FILLMOV R0,#0AAHLCALL INITCAN ;CAN初始化(CAN片选为CS0:0DE00H) ;-------------------------发送------------------RETRAN: MOV DPH, #0DEHMOV R0, #20HLCALL SEND ;发送20H为首址的1桢数据(前三字节为:08H、BBH、FFH,后8字节任意)LCALL DELAY;-----------------------接收数据--------------------------MOV DPH, #0DEHMOV R0, #30HLCALL RECVNOP ;在此处设置断点,以观察结果JMP $INITCAN:MOV DPTR,#MODE ;初始化子程序,DPH、R0为入口参数MOV A,#01HMOVX @DPTR,A ;模式寄存器,单验收滤波器,进入复位模式MOV DPTR,#CDRMOV A,#88HMOVX @DPTR, A ;时钟分频R,选择增强CAN模式,关闭CLKOUT输出MOV DPTR,#IERMOV A,#0DHMOVX @DPTR,A ;中断使能寄存器,开溢出、错误、接收中断MOV DPTR,#BTR0MOV A,#03HMOVX @DPTR,A ;总线定时寄存器一MOV DPTR,#BTR1MOV A,#0FFHMOVX @DPTR,A ;总线定时寄存器二,6MHz晶振,波特率30Kbps MOVX A, @DPTRMOV DPTR,#OCRMOV A,#0AAHMOVX @DPTR,A ;输出控制寄存器MOV DPTR,#ACR0MOV A, 00HMOVX @DPTR,A ;验收代码ACR0MOV DPTR,#ACR1MOV A,#2FHMOVX @DPTR,A ;无关MOV A,#0FFHINC DPTRMOVX @DPTR,A ;无关INC DPTRMOVX @DPTR,A ;无关MOV DPTR,#AMR0MOV A,#0FFH ;modify #00 to #0FFMOVX @DPTR,A ;验收屏蔽寄存器AMR0=00HINC DPTRMOV A,#0FFHMOVX @DPTR,A ;AMR1INC DPTRMOVX @DPTR,A ;AMR2INC DPTRMOVX @DPTR,A ;AMR3验收屏蔽:只有ACR0是相关项MOV DPTR, #RBSAMOV A, #00HMOVX @DPTR, A ;接收缓冲器FIFO起始地址为0MOV DPTR, #TXERRMOVX @DPTR, A ;清除发送错误计数器MOV DPTR, #ECCMOVX @DPTR, A ;清除错误代码捕捉寄存器MOV DPTR,#MODEMOV A,#08HMOVX @DPTR,A ;单滤波方式,返回工作方式RETSEND:MOV DPTR,#SR ;状态寄存器MOVX A,@DPTR ;从SJA1000 读入状态寄存器值JB ACC.4,SEND ;判断是否正在接收正在接收则等待SEND0:MOVX A,@DPTRJNB ACC.3,SEND0 ;判断上次发送是否完成未完成则等待发送完成SEND1:MOVX A,@DPTRJNB ACC.2,SEND1 ;判断发送缓冲区是否锁定锁定则等待SEND2:MOV DPTR,#FIN ;SJA1000 发送缓存区首址MOV A, #08HMOVX @DPTR, AINC DPLMOV A, #00HMOVX @DPTR, AINC DPLMOV A, #4FHMOVX @DPTR, AINC DPLMOV R2, #08HSEND3:MOV A, @R0 ;R0为发送数据首址MOVX @DPTR, AINC R0INC DPLDJNZ R2, SEND3MOV DPTR,#CMR ;命令寄存器地址MOV A,#10H ;发送请求MOVX @DPTR,A ;启动SJA1000 发送RETRECV: MOV DPTR,#SR ;状态寄存器地址MOVX A,@DPTRANL A, #0C3H ;读取总线脱离、错误状态、接收溢出、有数据等位JNZ PROCRET ;无上述状态,结束PROC: JNB ACC.7, PROC1BUSERR: MOV DPTR, #IR ;IR中断寄存器,出现总线脱离MOVX A, @DPTR ;读中断寄存器,清除中断位MOV DPTR, #MODEMOV A, #08HMOVX @DPTR, A ;将方式寄存器复位请求位清0RETNOPPROC1: MOV DPTR, #IR ;总线正常MOVX A, @DPTR ;读取中断位JNB ACC.3, OTHEROVER: MOV DPTR, #CMR ;数据溢出处理MOV A, #0CHMOVX @DPTR, A ;清除数据溢出位,释放接收缓冲区RETNOPOTHER: JB ACC.0, RECELJMP RECOUT ;接收缓冲区无数据NOPRECE: CLR P1.0SETB P1.7MOV DPTR, #FIN ;接收缓冲区有数据MOVX A,@DPTRJNB ACC.6, RDATAMOV DPTR, #CMR ;远程桢处理MOV A, #04HMOVX @DPTR, ALJMP RECOUTNOPRDATA: MOV DPTR, #DA TA1 ;将接收数据传至R0为首址的内存中MOV R2, #08HRDATA1: MOVX A, @DPTRMOV @R0, AINC DPLINC R0DJNZ R2, RDATA1MOV DPTR, #CMRMOV A, #04HMOVX @DPTR, ARECOUT: MOV DPTR, #ALC ;释放仲裁丢失捕捉寄存器和错误捕捉寄存器MOVX A, @DPTRNOPRETDELAY: MOV R2, #40DELAY1: MOV R4, #255DELAY2: NOPDJNZ R4, DELAY2DJNZ R2, DELAY1RETEND1。
CAN基本通信实验
CAN 基本通信实验实验目的了解CAN-bus通信原理,实现基本的CAN-bus双节点通信。
掌握CANE-E接口卡和CANalyst-Ⅱ分析仪的基本使用方法。
2.1.2 实验设备及器件PC机一台iCAN教学实验开发平台一台2.1.3 实验内容利用实验平台上的CANET-E及CANalyst-Ⅱ分析仪构成两个CAN节点,实现单节点自发自收,双方数据的收发。
2.1.4 实验要求实现CAN-bus网络上两个节点的双向对发实验。
2.1.5 实验预习要求了解CAN-bus通信原理,CAN-bus网络拓扑结构,CAN-bus传输介质等相关内容。
2.1.6 实验步骤CAN节点的连接;CAN节点初始化;单节点收发;双节点收发。
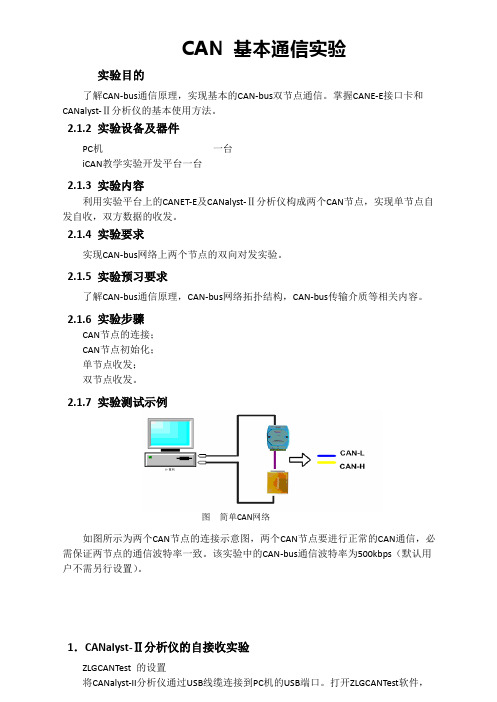
2.1.7 实验测试示例图简单CAN网络如图所示为两个CAN节点的连接示意图,两个CAN节点要进行正常的CAN通信,必需保证两节点的通信波特率一致。
该实验中的CAN-bus通信波特率为500kbps(默认用户不需另行设置)。
1.CANalyst-Ⅱ分析仪的自接收实验ZLGCANTest 的设置将CANalyst-II分析仪通过USB线缆连接到PC机的USB端口。
打开ZLGCANTest软件,点击主菜单中的类型,从下拉列表中选择USBCAN2,如所示:图在ZLGCANtest选择USBCAN2在“设备操作”菜单中选择“打开设备”项。
出现图所示的属性对话框。
图设置CANalyst设置验收码为0x00000000,屏蔽码为0xffffffff,实验平台的CAN 网络的波特率为500kbps,据此设置定时器0:0x00,定时器1:0x1c,滤波方式为双滤波,模式为正常工作模式。
点击“确定”按钮,完成设置,出现如图所示的收发界面。
图ZLGCANtest 收发界面选择发送方式为:自收自发,每次发送5 帧,帧类型为:标准帧,帧ID为:00000000,数据为:00 01 02 03 04 05 06 07,帧格式为:数据帧。
CAN总线实验报告

CAN总线数据通讯[实验项目]CAN总线数据通讯[实验目的]基于SJA1000 CAN总线控制器和单片机系统完成CAN总线数据收发实验、掌握CAN总线波特率设置、消息ID和接收滤波器配置,完成两个以上节点的数据通讯。
[实验仪器设备]SJA1000 CAN接口模块单片机最小系统板串行下载线(USB转TTL电平串口线)USB转DC5.5mm供电线杜邦线[实验原理]1、CAN通信板原理图复位电路TJA1050T外围电路振荡电路2、单片机板原理图单片机最小系统主要包括3部分:电源,晶振和复位电路。
晶振采用11.0592MHz,复位采用RC电路。
由于单片机P0口开漏输出,需要外接10K的上拉电阻。
3、原理简述SJA1000通过并行总线与MCU连接,包括地址/数据线、读/写控制信号、片选、中断等十多根信号线。
通过对单片机进行编程,来控制CAN节点的初始化、帧的发送和接受等。
初始化流程:数据发送流程:中断接收流程:查询接收流程:[实验内容](1)硬件连接1、单片机和SJA1000的连接使用杜邦把CAN模块的P0口连接到单片机开发板的P0扩展口上;把ALE,WR,RD,INT0,CS,KEY分别对应连接到单片机的ALE,P3.6,P3.7,P3.2,P2.0和P2.5上;把5V和GND分别对应接到单片机的电源接口上。
2、SJA1000节点间的连接将两个SJA1000节点的CAN_H,CAN_L对应连接,即高接高,低接低,即可完成通信线路的连接。
3、单片机与下载器的连接按如下图所示的接线方式连接下载器(即USB转TTL电平串口)和51单片机系统板。
其中5V、3.3V电源线不接,只连接GND并交叉连接RX和TX,即TX接单片机的P3.0,RX接单片机的P3.1。
可三根采用杜邦线将下载器的三个引脚接至51系统板的排插相应引脚上。
(2)软件编程1、在KeilC开发环境下编写STC89C52程序,测试程序的下载和运行。
2、编写STC89C52串行通讯程序,能够通过串口向PC机发送字符,显示程序运行状态。
综合实验十二 CAN-Bus接口控制实验

实验三十四CAN-bus接口控制实验一.实验目的通过调用CAN程序库SJA1000_PELI.LIB的基本函数,实现实验板上CAN节点的初始化以及CAN 节点的自发自收测试。
二.实验设备及器件IBM PC 机一台单片机仿真器、编程器、实验仪三合一开发平台一台三.实验内容编写一段程序,调用SJA1000_PELI.LIB中的函数,实现CAN节点的初始化,能够进行数据的自发自收,并能在LED上显示相关的信息。
四.实验要求学会对CAN节点的基本操作,理解实现CAN通信的基本流程。
五.实验步骤1.将CAN-bus PARK的CSCAN与P2.7相连接。
2.将CAN-bus PARK的RSTCAN与P1.0脚相连接。
3.如果用户采用中断方式,将4.利用SJA1000_PELI库编写CAN节点的初始化和自发自收程序。
5.利用ZLG7290,将CAN节点自发自收数据的成功与否显示出来。
六.实验预习要求1.阅读关于CAN和CAN相关器件的基本介绍,具备CAN和CAN相关器件的基本知识。
2.阅读《SJA1000_PELI库说明及其使用》,了解在如何在程序中应用SJA1000_PELI库。
七.实验参考程序#include <REG52.H>#include "VIIC_C51.h" //I2C程序库头文件#include "Sja1000_peli.h" //CAN程序库头文件#define uchar unsigned char#define ZLG7290 0x70sbit RESET_PIN=P1^0;uchar Display_Buffer[5]={0x0d,0x15,0x15,0x10}; //显示GOODuchar CAN_Baudrate_Filter_Buffer[9]={14,0,0,0,0,0xff,0xff,0xff,0xff};//存放设置波特率和滤波器的数据uchar Send_CAN_Info_ID[5]={0x88,0x00,0x00,0x00,0x00};//存放信息帧的数据,符合CAN2.0Buchar Send_Data_For_Self[8]={0x01,0x02,0x03,0x04,0x05,0x06,0x07,0x08};//存放数据帧的数据uchar ScanNum[1];/*--------------------------------------------------------------------------------------------------- ** 函数原型: void Delay_ms(uchar j)** 功能描述: 该函数用于不精确的延时。
can总线通讯实例
can总线通讯实例Can总线通讯实例一、引言Can总线是一种常用于工业控制系统中的通信协议,具有高可靠性和抗干扰能力。
本文将以一个实际的Can总线通讯实例为例,介绍Can总线的工作原理以及在实际应用中的优势和应用场景。
二、Can总线的工作原理Can总线采用了CSMA/CD(载波监听多点接入/碰撞检测)的工作方式,可以实现多个设备之间的高效通信。
Can总线由两根线组成,分别是CAN_H和CAN_L,通过这两根线实现数据的传输和通信。
Can总线中的设备分为两类,分别是Can控制器和Can节点。
Can控制器负责控制总线的传输速率和数据的发送和接收,而Can节点则是实际的设备,可以是传感器、执行器等。
Can节点通过Can控制器与Can总线进行连接。
当Can节点需要发送数据时,首先会监听总线上是否有其他节点正在发送数据,如果没有,就可以将数据发送到总线上。
如果多个节点同时发送数据,会发生碰撞。
Can总线会检测到碰撞的发生,并根据一定的算法进行冲突解决,以保证数据的准确传输。
三、Can总线的优势1. 高可靠性:Can总线具有很高的抗干扰能力,能够在噪声较大的环境下正常工作。
这使得Can总线广泛应用于工业控制系统等对可靠性要求较高的领域。
2. 高效性:Can总线采用了CSMA/CD的工作方式,可以实现多个设备之间的高效通信。
Can总线的通信速率可以达到几百kbps甚至几Mbps,满足了大部分实时通信的需求。
3. 灵活性:Can总线支持多主机的工作方式,可以实现多个设备之间的灵活通信。
同时,Can总线还支持节点的热插拔,方便系统的维护和升级。
4. 成本低廉:Can总线的硬件成本相对较低,同时由于其高可靠性和抗干扰能力,可以减少系统的维护成本和故障率。
四、Can总线的应用场景Can总线广泛应用于工业控制系统、汽车电子控制系统等领域。
以下是一些Can总线的典型应用场景:1. 汽车电子控制系统:Can总线在汽车电子控制系统中被广泛应用,例如发动机控制模块、制动系统、空调系统等。
现场总线通信实验
实验一CAN总线通信实验实验目的通过CAN总线通信实验,掌握CAN通信协议实现过程,了解CAN节点硬件设计、软件调试等环节。
实验内容1)熟悉相关实验设备,分析所给CAN节点硬件电路;2)了解CAN节点软件设计过程,包括设计环境、编译、调试、CAN节点通信代码的生成;3)通过串口调试软件监视CAN节点之间通信过程;实验设备硬件:PC机两台、CAN通信节点两个、数据线软件:Keil4程序设计软件、串口调试程序实验步骤1、设备连接;2、在Keil环境下,进行节点通信程序调试、编译、生成hex文件;3、串口调试程序中将已生成hex文件下载到CAN节点;4、按下中断按键,产生中断计数,数码管后1、2位显示计数值。
同时将计数值通过CAN总线发送到另一节点的数码管3、4位上显示,完成通信过程。
附件:1、硬件原理图USB--232模块电源模块MCU模块CAN控制模块数码管电路晶振中断复位MCU接口2、实验图片上电后状态通信状态3、串口调试工具4、Keil程序编辑软件注:1、数码管从右到左分别是1~4位。
1~2位显示要发送的数据。
3~4位显示接收到的数据。
紧靠电源开关的按键S2为外部中断按键。
2、CAN之间通讯实验分为数码管显示和中断计数两个部分。
按一下中断按键,产生中断计数。
数码管1~2位显示现在的计数值。
计数值通过CAN总线发送到另外一节点的数码管高位上显示。
实验二:RS485实验实验目的通过实验,掌握RS485串行通信协议实现过程,了解节点硬件设计、软件调试等环节。
实验内容1)熟悉相关实验设备,分析RS485硬件电路设计过程;2)了解节点软件设计过程,包括设计环境、编译、调试、CAN节点通信代码的生成;3)通过串口调试软件监视CAN节点之间通信过程;实验设备硬件:PC机两台、CAN通信节点两个、数据线软件:Keil4程序设计软件、串口调试程序实验步骤1、设备连接;2、在Keil环境下,进行节点通信程序调试、编译、生成“接收”、“发送”程序的hex文件;3、串口调试程序中将已生成hex文件,分别下载到两个节点;4、下载成功后,分别将J2、J4的1、2端的跳线拨下,将2、3端连接。
CAN总线实验过程补充说明
实验一SC2102 CAN总线PCI插卡应用图1采集数据的格式为:ID-DLEN-DA TARTR位为1时,对应远程帧。
远程帧的含义是,通过发送远程帧可以启动其资源节点传送它们各自的数据。
图2观察图2中,AC,AM对收发的影响。
每次对如图2中CAN PORTx 操作栏中的设置更改后,需要点击复位按钮,才能生效。
否则,仍为上次的设置。
观察图3中AC,AM对收发的影响,以及FF位对地址长度的影响。
图4当FF=0时,地址位数是11位,若强行赋给高于11位的地址,程序不会出错。
这个没有什么特别的地方,编写程序时作相应的处理即可。
本次实验用到的所有器件(除带PCI接口的台式机和相关软件)如图5,图6所示。
图5 SC2102 CAN总线PCI插卡实际连接如图7图8所示。
图7图8实验2 CAN总线远程测控网络设计实验2-1 SC2102与SC3410之间的通信本实验用到的器件有SC2102,232母头,SC3410,SC3410配套控制卡,50线排线,导线若干,带PCI接口的台式机,5V电源,相关软件。
其中部分器件如图9,图10所示。
图9 SC3410图10 SC3410配套控制卡其实验具体连接方式如图11,图12所示。
图11图12要能正确进行通信,要满足几个条件。
波特率一致,AC,AM设置正确。
观察图13,其ID 设置需要和SC3410的ID一致,方能正确通信(为何)。
这个ID应该不是SC2102的ID,因为其在图14所示界面中已作设置。
这一点还不是太明白,我想应该是程序编写时的原因。
图13图14如图13中,可以直接输入命令,你就可以在图13中得到相应的反馈值,命令定义参考实验手册的附录。
从正面看SC3410配套控制卡,如图15所示。
图15 SC3410配套控制卡器件与引脚定义位置示意图观察图15中器件的位置和引脚定义,他和实物一一对应。
在电压测量环节,上位机软件输出电压值和由电阻分压得到的计算值相差较大,在上位机软件中,改变AD量程后,输出结果又会有变化,但使用6位半万用表测量实际输入电压时却和上位机输出结果基本一致。
40. CAN通信实验
1-16 个 tq 长度(CAN_BS1_1/2/3…16tq)。 CAN_BS2:用于设置 CAN 位时序中的 BS2 段的长度,它可以被配置为
CAN_RFLM:用于设置是否使用锁定接收 FIFO(ENABLE/DISABLE),锁定接 收 FIFO 后,若FIFO 溢出时会丢弃新数据,否则在 FIFO 溢出时以 新数据覆盖旧数据。
CAN_TXFP:用于设置发送报文的优先级判定方法(ENABLE/DISABLE),使 能时,以报文存入发送邮箱的先后顺序来发送,否则按照报文 ID 的 优先级来发送。
{
uint16_t CAN_Prescaler; //
uint8_t CAN_Mode;
//
uint8_t CAN_SJW;
//
uint8_t CAN_BS1;
//
uint8_t CAN_BS2;
//
FunctionalState CAN_TTCM; //
FunctionalState CAN_ABOM; //
C.回环模式
普中STM32开发板带您进入ARM世界
D.静默回环模式
普中STM32开发板带您进入ARM世界
2.位时序及波特率
普中STM32开发板带您进入ARM世界
(2)标号2:发送邮箱 它含有3个发送邮箱,软件可通过三个发送邮箱设置消息。发送调度
程序负责决定首先发送哪个邮箱的内容。 (3)标号3:验收筛选器
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
通讯函数
➢ S3C2410X 带有高速SPI 接口,可以直接 和MCP2510 通讯。通过如下两个函数:
➢ SPISend ()//向同步串口发送数据(spi.c) ➢ SPIRecv ()//从同步串口读取数据(spi.c)
MCP2510 的初始化
➢ MCP2510 的初始化如下步骤: ➢ 1、软件复位,进入配置模式 ➢ 2、设置CAN 总线波特率 ➢ 3、关闭中断 ➢ 4、设置ID 过滤器 ➢ 5、切换MCP2510 到正常状态(Normal) ➢ 6、清空接受和发送缓冲区 ➢ 7、开启接收缓冲区,开启中断(可选)
MCP2510
➢ 通过定义如下宏实现MCP2510 的片选: ➢ #define MCP2510_Enable()
GPHDAT=GPHDAT&0x7fe ➢ #define MCP2510_Disable()
GPHDAT=GPHDAT|0x01 ➢ 上述的两个宏定义就是对GPH0 端口的置1
和清0 操作。
来判断是否接收到(或者发送出)数据。
MCP2510控制字
程序框图
实验步骤
➢ 1.新建工程,将“Exp7 CAN 总线通讯实验”中 的文件添加到工程。
➢ 2.编写MCP2510 驱动函数(MCP2510.c),包 括:CAN 初始化(init_MCP2510)、发送数据 (canWrite)、接收数据(canRead)、查询数 据(canPoll)。
➢ 3.在主函数中实现将从串口0 接收到的数据发送 到CAN 总线,将从CAN 接收到的数据,发送到 串口0(Main.c)
CAN总线接口通讯实验
CAN 总线控制器MCP2510
➢ ◆ 支持标准格式和扩展格式的CAN 数据帧结构 ➢ ◆ 0-8 字节的有效数据长度,支持远程帧 ➢ ◆ 最大1Mbps 的可编程波特率 ➢ ◆ 两个支持过滤器(Fliter、Mask)的接收缓冲
区,三个发送缓冲区 ➢ ◆ 支持回环(Loop Back)模式 ➢ ◆ SPI 高速串行总线,最大5MHz(4.5V 供电) ➢ ◆ 3V 到CP2510 中有3 个发送缓冲区,可以循环使用。也可以 只使用一个发送缓冲区,但是,
➢ 必须保证在发送的时候,前一次的数据已经发送结束。 ➢ MCP2510 中有2 个接收缓冲区,可以循环使用。 ➢ 数据的发送和接收均可使用查询或者中断模式,这里,为
编程简单,收发数据都采用查 ➢ 询模式。通过状态读取命令(Read Status Instruction)