涂胶机器人视觉系统的应用研究
涂胶机器人涂胶轨迹离线编程仿真技术应用探究
摘要:为提高涂胶机器人在线调试的效率,结合在改款车型的涂胶轨迹程序编制及调试中的应用经验,以车底焊缝胶机器人为例,从虚拟环境的搭建,离线编程,虚拟仿真3个方面对涂胶轨迹离线编程仿真技术进行了探究及论述。
实践证明,涂胶机器人涂胶轨迹离线编程仿真技术可有效提高在线调试效率,减少在线调试时间。
关键词:涂胶机器人离线编程虚拟仿真中图分类号:TQ639文献标识码:BDOI :10.19710/ki.1003-8817.20190270涂胶机器人涂胶轨迹离线编程仿真技术应用探究王泽龙潘雷亮王圣男乔伟肖飞(北京汽车股份有限公司,北京101300)作者简介:王泽龙(1987—),男,中级工程师,硕士学位,主要研究涂装机器人的规划及技术应用。
1前言目前机器人在汽车涂装喷漆工序中得到广泛的应用,随着机器人技术的不断成熟以及车型对涂胶质量要求的不断提高,人力成本的增加,涂胶工序也逐步开始应用机器人。
目前在车底焊缝涂胶(UBS ),底部减震胶(UBC ),裙边胶(RPP )等工序应用机器人较多。
随着对材料和涂胶质量要求的提高,水性阻尼胶(LASD ),内板涂胶也逐渐应用机器人[1]。
在新车型导入过程中,机器人涂胶轨迹的编制及调试,主要依靠在线示教。
在线示教的工作量大且周期较长。
涂胶轨迹离线编程仿真技术可以提高在线调试的效率,减少在线调试时间。
作者对涂胶离线编程仿真技术进行了探究,并在三款改款车型的涂胶轨迹程序编制上进行了应用。
从虚拟环境的搭建,离线编程,虚拟仿真三个方面对涂胶轨迹离线编程仿真技术进行了论述,希望为以后涂胶机器人的规划建设项目及使用提供借鉴。
不同的涂胶工序因为工艺要求的不同,在涂胶轨迹程序的编制上也存在差异。
因车底焊缝胶的涂胶轨迹编程工作量和难度都比较大,因此主要论述了车底焊缝胶机器人的涂胶轨迹离线编程仿真技术。
2涂胶机器人站工作流程涂胶机器人站包括机器人本体,七轴轨道,机器人控制柜,站控制柜,视觉系统,输送装置,安全光栅,胶枪系统。
工业机器人在汽车制造业的喷涂与涂胶功能

工业机器人在汽车制造业的喷涂与涂胶功能在汽车制造业中,工业机器人的应用日益广泛,其中喷涂与涂胶这两项功能发挥着至关重要的作用。
它们不仅提高了生产效率和产品质量,还降低了人工劳动强度和生产成本。
工业机器人在汽车喷涂方面展现出了卓越的性能。
传统的人工喷涂方式存在着诸多问题,比如喷涂质量不稳定、效率低下、对工人健康有害等。
而机器人喷涂则有效地解决了这些难题。
首先,机器人喷涂能够实现高精度和高均匀度的涂层。
机器人的动作精准且重复精度高,可以精确控制喷枪的移动速度、距离和角度,确保每一个部位都能得到均匀一致的涂层。
这对于汽车外观的质量至关重要,光滑、均匀的漆面不仅美观,还能提供良好的防护性能,防止腐蚀和磨损。
其次,机器人喷涂的效率极高。
相较于人工操作,机器人可以不知疲倦地连续工作,大大缩短了生产周期。
而且,机器人能够在复杂的车身结构上灵活移动,快速完成各个部位的喷涂任务,有效地提高了生产线上的整体产能。
再者,机器人喷涂还能显著降低涂料的浪费。
通过精确的控制和优化的喷涂路径规划,机器人能够在保证涂层质量的前提下,最大限度地减少涂料的过度喷涂,从而降低了原材料的成本。
在汽车制造的涂胶环节,工业机器人同样表现出色。
涂胶质量的好坏直接影响到汽车的密封性、隔音性和耐久性。
机器人涂胶能够确保胶条的宽度、厚度和形状均匀一致。
这对于汽车门窗、挡风玻璃等部位的密封效果至关重要。
均匀的胶条能够有效地防止雨水、灰尘和噪音的侵入,提高车辆的舒适性和可靠性。
此外,机器人涂胶的速度和稳定性也是人工无法比拟的。
它们能够快速、准确地完成涂胶任务,并且在长时间的工作中保持稳定的涂胶质量,减少了因人为因素导致的质量波动。
为了实现工业机器人在汽车喷涂与涂胶中的出色表现,需要一系列的技术支持和系统配置。
在硬件方面,需要高性能的机器人本体、精确的喷枪或涂胶枪、先进的传感器和控制系统等。
机器人本体要具备足够的自由度和灵活性,以适应复杂的工作环境和动作要求。
机器人在涂装车间的应用
机器人在涂装车间的应用发展机器人可以提高综合国力。
机器人技术是集光机电信息自动化于一身的高新技术,从某种意义上讲,一个国家机器人水平的高低,代表了一个国家的综合实力。
国内外很多企业都是通过使用工业机器人来提高生产率和产品质量。
可以做到根据市场需求,及时调整生产策略。
国家“863”计划正是看到了这一趋势,对工业机器人及其应用工程给予了大力支持,在汽车、电子、家电等行业推广了一批示范工程,并形成了拥有自主知识产权的产品系列。
1 机器人自动喷涂线形式1.1 通用机器人自动喷涂线早期的全自动喷涂作业中,广泛采用通用机器人组成的自动线。
这种自动线适应最复杂型面的喷涂作业,适合喷涂的产品可从汽车工业、机电产品工业、家用电器工业到日用品工业。
因此,这种自动线配备的机器人要求动作灵活。
机器人的自由度一般为5~6个。
1.2 机器人与喷涂机自动喷涂线这种形式的自动线一般用于喷涂大型工件,如汽车驾驶室、车厢或面包车等。
机器人用来喷涂车体的前后围及圆弧面。
喷涂机则用来喷涂车体的侧面合顶面的平面部分。
1.3 仿形机器自动喷涂线仿形机器人根据喷涂对象形式特点简化通用机器人,使其完成专门的工作,一般有机械仿形和私服仿形机器人两种。
这种自动线适合箱型零件的喷涂作业,由于仿形的作用,喷具的运动轨迹于被喷零件的形状相应一致,能在最佳条件下喷涂,因而喷涂质量亦最高。
这种自动线另外一个特点是工作可靠,但不适合型面较复杂的喷涂。
1.4 组合式自动喷涂线这是一种典型的组合式自动喷涂线。
车体外表面用仿形机器人喷涂,车体内涂则采用通用机器人,并完成开门、开盖、关门、关盖等辅助工作。
2 机器人自动喷涂线的结构与系统功能机器人自动喷涂线的结构根据被喷涂对象的产品种类、生产方式、输送形式、生产纲领及油漆种类等工艺参数确定,并根据其生产规模、生产工艺和自动化程度设置系统功能2.1 自动识别系统识别系统是自动线尤其是多品种混流生产线必须具备的基本单元。
机器人自动涂胶的应用

机器人自动涂胶的应用随着科技的不断进步和发展,机器人技术在各个领域都得到了广泛的应用。
其中一项关键的技术就是机器人自动涂胶技术。
机器人自动涂胶技术是利用机器人系统自动完成产品表面的涂胶工作,可以广泛应用于汽车、电子产品、家具等制造行业。
它能够有效提高生产效率、保证产品质量,降低人力成本,受到了广泛的关注和应用。
本文将就机器人自动涂胶技术的应用进行探讨和介绍。
一、机器人自动涂胶技术的原理机器人自动涂胶技术是指利用机器人系统完成产品表面的涂胶工作。
它利用先进的控制系统、高精度的传感器、多轴运动控制等技术,使得机器人能够准确地控制涂胶喷嘴的位置、速度和喷嘴的运动轨迹,实现对产品表面的精确涂胶。
在涂胶过程中,机器人能够根据产品的形状和尺寸自动调整喷嘴的运动轨迹,保证涂胶的均匀性和一致性。
机器人自动涂胶技术能够实现高速涂胶,大大提高了生产效率。
二、机器人自动涂胶技术的应用1. 汽车制造在汽车制造行业,机器人自动涂胶技术得到了广泛的应用。
汽车制造过程中涉及到大量的涂胶工作,如车身涂装、密封胶涂布等工序。
采用机器人自动涂胶技术可以保证涂胶均匀、稳定,提高了汽车的涂装质量,同时也降低了生产成本。
2. 电子产品制造在电子产品制造中,机器人自动涂胶技术也被广泛应用。
电子产品中需要对电路板、外壳等部件进行涂胶处理,以防止产品受潮、漏电等问题。
机器人自动涂胶技术能够实现对电子产品的精确涂胶,提高了产品的质量稳定性,保证了产品的可靠性。
三、机器人自动涂胶技术的优势1. 提高生产效率机器人自动涂胶技术能够实现高速涂胶,大大提高了生产效率。
相比人工涂胶,机器人不需要休息,可24小时连续工作,能够大大提高涂胶的速度和效率。
2. 保证产品质量机器人自动涂胶技术能够实现对产品表面的精确涂胶,保证了涂胶的均匀性和一致性,提高了产品的质量稳定性。
3. 降低人力成本采用机器人自动涂胶技术可以大大降低人力成本。
相比人工涂胶,机器人不需要进行培训,不受疲劳、情绪等因素的影响,能够大大节约涂胶的人工成本。
机器人视觉技术的研究和应用
机器人视觉技术的研究和应用随着科技的不断发展和普及,机器人成为了人类工作和生活中越来越不可或缺的一部分。
近年来,机器人视觉技术的研究和应用也日益受到关注。
本文将详细介绍机器人视觉技术的背景、原理、应用以及未来趋势。
一、机器人视觉技术的背景机器人视觉技术是一种利用机器视觉处理技术来实现对可视物品进行识别、检测、定位、跟踪等操作的技术。
机器人视觉技术的发展源于智能控制领域,最初被广泛应用于自动工业生产和机器人导航。
随着技术的进步,机器人视觉技术也得到了更广泛的应用。
在医疗、农业、消费电子、智能家居、自动驾驶等行业和领域中,机器人视觉技术开始发挥着越来越重要的作用。
二、机器人视觉技术的原理机器人视觉技术的实现需要依靠许多技术手段。
这些技术手段包括:数字图像处理、图像识别、目标跟踪、自主控制和传感器技术等。
数字图像处理是机器人视觉技术中最基础的技术。
它通过对声音、光线、压力等信息的采集和转换,将其转化为计算机可处理的数字信号。
接下来,这些数字信号将经过一系列的处理算法,包括图像增强、滤波、图像分割等操作,最终生成机器视觉所需要的信息。
接下来是图像识别。
图像识别是通过对采集到的图像数据进行分析,对拍摄对象进行分类、识别的过程。
机器人视觉技术中常用的图像识别方法有:特征提取法、神经网络法、模板匹配法等。
机器人视觉技术最常用的是神经网络法,因为它具有较高的识别准确性。
除了图像识别,机器人视觉技术还需要目标跟踪技术。
目标跟踪技术能够实现对动态目标的实时监控和跟踪。
常见的目标跟踪方法有:模型跟踪法、运动结构法、特征跟踪法等,其中模型跟踪法应用较为广泛。
自主控制技术是机器人视觉技术的重要组成部分,它使机器人能够自主完成任务。
自主控制技术的实现依赖于传感器技术,传感器技术则能够为机器人提供远距离控制、通讯、良好的环境感知等功能,促进机器人视觉技术应用的进一步提高。
三、机器人视觉技术的应用1. 工业自动化在工业自动化领域,机器人视觉技术被广泛应用于制造、检测、包装等环节。
机器人车身涂胶系统的应用
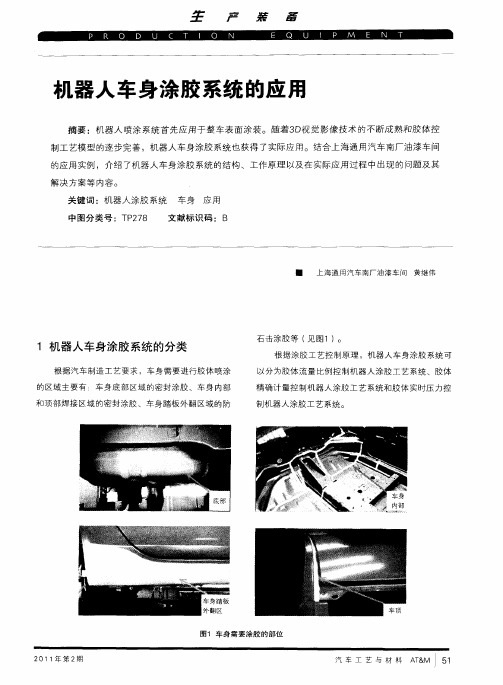
石击 涂胶 等 ( 图1)。 见 根 据 涂, 7艺 控 制原理 ,机 器人 车 身涂胶 系统 可 9 2 " 以分 为胶体 流 量 比例控 制 机器 人涂 胶 工艺 系统 、胶体 精 确计 量控 制 机器 人涂 胶 工艺 系统 和胶体 实时压 力控 制机 器 人涂胶 工 艺 系统 。
‘ 、 ‘ 1 3’ 1 4’和 ‘ ’ 分 别 代 表 “ 越 ” 、 “ 1 5 凯 凯
生
产 装 备。
机器人 车身涂胶 系统 的应 用
摘要 :机器人 喷涂 系统 首先应用 于整 车表 面涂装 。随着3 视 觉影像 技术 的不 断成 熟和 胶体控 D 制工 艺模 型的逐步完 善 ,机器人车 身涂胶 系统 也获得 了实际应用。结合 上海通用 汽车南厂油漆 车间 的应用 实例 ,介绍 了机器 人车身涂胶 系统的结构 、工作原理 以及在 实际应 用过程 中出现的 问题及 其
( CK BE HOF 通 过 光 纤 与 现场 的胶 体 流量 伺 服 电 F)
机控 制 器 ( NDR I AMA T)进行 通信 。
等 组 成 。 图2 车 身 内部 和 顶 部 焊 接 区 域 密 封 用 涂 是
S
S
图2 车 身 内部和顶 部焊 接 区域 密封 用涂 胶 系统 的网络 拓扑 结构
图1 车 身需 要涂 胶 的部位
2011年 第 2期
汽 车 工 艺 与 材 料
A &M 51 T
. 严 装 备 ± 生 产 备。
2 机 器 人 车身 涂 胶 系统 的 结构
机 器 人 涂 胶 系 统 的 主 要 结 构和 控 制原 理 基 本 相 同 ,下面 以用于 车身 内部 焊接 区域 密封 的涂胶 系统 为 例 进行介 绍 。
机器人涂胶系统原理与维护技术

机器人涂胶系统原理与维护技术机器人涂胶系统采用机器人进行自动化涂胶,能够提高涂胶的精度和效率,广泛用于汽车制造和其他工业领域。
本文将介绍机器人涂胶系统的原理和维护技术。
机器人涂胶系统由涂胶机、机器人、控制器和反馈系统组成。
涂胶机用于储存和喷出胶水,机器人用于在零件表面涂胶,控制器用于控制机器人和涂胶机的动作,反馈系统用于监测涂胶的质量。
1. 涂胶机涂胶机主要由胶水箱、涂胶枪和压缩空气系统组成。
胶水箱用于储存和加热胶水,涂胶枪用于将胶水喷涂到零件表面,压缩空气系统用于提供压缩空气使胶水喷出。
2. 机器人机器人有不同种类,包括SCARA机器人和6轴机器人。
机器人的任务是将涂胶枪定位在正确的位置上,在零件表面按照预定的路径涂胶。
3. 控制器控制器用于控制机器人和涂胶机的动作,包括控制机器人的坐标和动作速度,控制涂胶机喷涂胶水的速度和压力。
4. 反馈系统反馈系统用于监测涂胶的质量,包括记录涂胶的厚度、均匀性和湿度。
涂胶机需要经常清洗以防止胶水堵塞喷嘴。
在清洗时,需要先将涂胶枪从机器人上卸下,然后清洗喷嘴和内部管道。
清洗时使用清水和清洗液,不要使用酸性和腐蚀性的物质。
清洗后需进行干燥。
机器人需要进行定期的维护以确保其正常运行。
维护包括对机器人的润滑和清洁,包括清洁移动部件和涂胶枪零部件,检查并更换不正常的零部件。
控制器需要定期调整以确保机器人和涂胶机的协调运行。
调整包括对机器人的位置、速度和精度进行校准,对涂胶机的喷胶速度和压力进行调整。
反馈系统需要定期监测,包括检查涂胶厚度、均匀性和湿度。
如果发现问题,应立即采取措施解决。
机器人视觉技术的研究进展与应用

机器人视觉技术的研究进展与应用随着人工智能技术的不断发展,机器人视觉技术也在快速地发展和应用。
机器人视觉技术指的是利用摄像头等传感器和计算机等处理器对视觉图像进行分析处理,从而实现各种人工智能应用,如自动驾驶、机器人操作等等。
今天的文章,我们将会探讨机器人视觉技术的研究进展以及其在各种领域所带来的应用。
一、机器人视觉技术的研究进展1. 深度学习技术的应用机器人视觉技术的研究离不开人工智能技术,尤其是深度学习技术。
深度学习技术相比传统人工智能算法具有更好的泛化能力和更高的精度,能够更好地模拟人的思维过程,并对海量复杂数据进行自主分析与深入理解。
机器人视觉技术的研究人员应用深度学习算法进行识别和分类,从而实现语音、手写、图像等的自动识别,为机器人进行自主决策提供更多的数据。
2. 物体跟踪技术的提高物品识别和跟踪一直是机器人视觉技术研究的难点,难以实现高精度和实时性。
但是,随着计算机处理能力的进一步提高和跟踪算法的不断完善,物体跟踪精度逐渐提高,并能够实时追踪。
近年来,基于深度学习的物体跟踪方法被广泛应用于自动驾驶、企业生产等多个领域,取得了了显著的效果。
3. 三维重建技术的发展三维重建是机器人视觉技术领域的一个重要而复杂的任务。
为了获得较高的三维重建精度,需要利用深度传感器和摄像头等多个感知器件,并运用基于传统图像处理和深度学习的多模态数据融合技术,而目前已经能够实现对室内场景、建筑物、机器人等进行三维重建,为机器人导航、地图构建等提供了更好的技术支撑。
二、机器人视觉技术的应用1. 自动驾驶自动驾驶汽车是近年来最广泛使用机器人视觉技术的应用之一。
自动驾驶汽车需要根据画面的实时变化来进行决策,准确识别路牌、道路情况和前方障碍等,控制汽车的运动。
因此,强大的图像识别和处理技术对于实现自动驾驶至关重要。
目前,全球已有多个大型汽车厂商投入重金开发自动驾驶汽车,这些高度智能化的汽车正逐渐进入市场。
2. 工业制造机器人视觉技术在工业制造业中的应用也是十分广泛的。