虚拟维修拆卸过程规划与仿真
基于虚拟现实技术的例行检修操作模拟系统设计与实现

基于虚拟现实技术的例行检修操作模拟系统设计与实现随着科技的发展与进步,虚拟现实(VR)技术逐渐应用于各个领域。
在工业生产中,虚拟现实技术的应用也得到了越来越广泛的应用。
其中,基于虚拟现实技术的例行检修操作模拟系统,不仅可以减少因工人操作不当而导致的事故,而且也可有效地提高工人的例行检修操作技能和速度。
本文将从系统设计与实现两个方面来详细探讨基于虚拟现实技术的例行检修操作模拟系统。
一、系统设计基于虚拟现实技术的例行检修操作模拟系统,需要将虚拟现实技术和模拟技术有机结合在一起。
该系统需要具备以下几个方面的功能:1、模拟真实情景:该系统需要能够精确模拟出检修操作时的场景,包括工厂设备的真实形态、大小、工作状态等。
2、模拟操作流程:该系统需要对检修操作流程进行模拟,包括工人进入场景的方式、需要检修的位置、操作顺序等。
3、提供及时反馈:该系统需要及时反馈工人的操作是否准确,在操作过程中会出现什么风险、如何避免风险等问题。
4、收集数据:该系统需要记录工人的操作数据,如操作时间、操作步骤、出现问题的位置等,以便后续分析总结,优化操作流程。
根据以上功能要求,本系统将涉及到建模、数据处理、三维环境的生成以及视觉反馈等多种技术。
该系统的设计和开发将会涉及到软件开发者、VR专家、机械工程师等多个团队,需要通过电话、网络、邮件等各种方式协调好任务和沟通。
二、系统实现基于虚拟现实技术的例行检修操作模拟系统在实现上也需要严格按照设计要求进行。
本系统将涉及到以下几个环节:1、数据采集:将工厂中的实际设备进行3D扫描,并将数据导入到3D软件中。
2、建模:根据采集到的数据,建模人员进行3D建模,将每个设备的3D模型制作出来。
3、场景设计:根据检修操作流程,设计出完整的场景,将设备放置在合适的地方,形成完整的工厂场景。
4、程序编写:根据检修流程,VR专家编写程序,设置好检修任务、规则和技能等,以及风险预警和反馈等。
5、VR设备连接:将VR设备连接到高性能计算机,并确保设备和系统能够良好兼容。
武器设备虚拟维修拆卸系统设计仿真研究

SHEN Yan—all ,YE Lin ,QI Yan—qing
(1.Eleven Department,Army Oficer Academy,Ar m y Off icer Academy,Hefei Anhui 23003 1,China; 2.Postgraduate Management T 230031,China)
基 金 项 目 :安徽 省 自然 科 学 基 金 (1508085MF131) 收稿 日期 :2017—02—27 修 回 日期 :2017—04—25
技术对装备进行仿真 ,能够帮助对维修拆卸 过程 进行路径规 划与验证 ,实现对装备拆 卸 过程 的训练指 导 ,帮助维 修人员 熟练掌握装备结构 、提高维修效率 。刘德明 _2 在虚拟维修训 练系统 的研究 中介绍 了线性序列规划 、Petri网 、PERT图等拆 卸序列的生成方法 ,但模 型过 于简 化 ,不 能满 足复杂装 备 的 维修需要 ;张王卫 将 Petri网与混沌遗传算法 相结合 ,研究 了虚 拟 维 修 拆 卸 序 列 的智 能 规 划 ,但 只 考 虑 拆 卸 过 程 的 维 修 工具及维修方 向的 约束 ,忽略 了操作 者的人 体工效 因素 ,导 致规划结果的可行性 不高 ;另外 ,虚 拟维 修拆卸 过程 的规划 缺少专业 的软件支持 ,目前 虚拟维修 主要 的技术 平台如 Vir-
摘要 :虚拟维修作为新兴的维修技 术手段 ,在 维修拆卸规划方 面存在不足 ,传 统的虚拟维修 拆卸系统不重视人 体工效因素 , 规划结果 的可行性不高 ,针对复杂武器装 备,其 可行 的拆卸序列 随零部件规模扩大呈指数级增长 ,普通的图论方法易出现混 乱 、死锁等现象。在 Petri网的基础上 引入解释结构模型 ,对装备零部件 进行系统划分 和层 级划分 ,简化对 维修拆卸 过程的 描述 ,将人体工效因素纳入拆卸过程的约束条件 ,利用 jaek平 台对人体工效指标进行定 义、计算 和二次开发 ,并结 合遗传算 法 ,定义 了虚拟维修拆卸过程的规 划 目标 、约束 条件 、编解码方式 ,针对某型变速箱进行了实例分析 ,验证 了系统 良好的应用 效 果 。 关键词 :解释结构模型 ;人体工效 ;虚拟维修;序列规划 中 图分 类 号 :TP319.3 文 献 标 识 码 :B
面向虚拟维修的拆卸过程建模研究
(. 1 军械工程学 院 导弹工程系 ,石家庄 0 0 0 ;2武汉军械士官学校 。武汉 4 0 7 ) 50 3 . 3 0 5
摘
要 : 本文对维修拆卸和 回收拆卸的进行特 点对比 ,根据维修拆卸 自身的特点 , 出了维修拆卸过 提 程信 息图( it n n e Ds s e by P o e s If r a in Gr p ,MD I 的概念 ,构建 Man e a c i s m l r c s n o m t a h a o PG) 了一种适合计算和优 化的维修过程信 息图模型 ,该模型描述 了零部件之 间的连 接关系和优先
集合 。
卸 目的是 为 接 近 维 修 部位 ,确保 维 修 任 务 顺 利 完 成 而解 除 必 要 的 约 束 ,需 要 对 目标 零 部 件 进 行 无 破坏性 的拆 卸过程 ,并 使其 可以重 新装配 。
从 拆 装 形 式 上 看 ,对 应 与 不 同 的 维 修 类 型 ,
l
匐 似
面向虚拟维修的拆 卸过程建模研究
St dy ofdi as em bl pr es odel g o r ual ai t an u s s y oc s m i f rvit n m n en ce
张王卫 。苏群星 刘鹏远 。
ZHANG n - i SU Qu - ig , I n - u n。 Wa g we , n xn L U Pe g y a
3 )D为 有 向边的 集合 。 4 )W 为有 向边上 的权重 系数 。
5 )集 合 Q=nlE N】表 示一 个 给 定 的机 械 设 {i I i
备 中各零部 件 的集合 ,N 表 示零部 件 的数 量 。
维 修 拆 卸采 取 不 同的 拆装 形 式 ,即 目标 拆 装 和 整 体拆 装 。整体 拆 装是 指预 防性 维 修 中的 定时 保 养 、 拆 修 与大 修 ,要 求对 装 备 系 统 或 装备 的局 部 进 行 完 全分 解 与 结 合 ; 目标 拆 装 对 应 于修 复 性 维 修 中 故 障件 的修 复 或 更换 ,拆 卸 过程 中尽 量 不 移 动 或 少移动 其它 零部件 。 从 拆 装 深 度 上 看 ,维 修 拆 卸 通 常 停 止 于 某 一
电子设备维修虚拟维修模拟

电子设备维修虚拟维修模拟随着科技的快速发展,电子设备成为现代生活中不可或缺的一部分。
然而,随之而来的问题是电子设备的故障和维修。
对于一些常见的故障,我们可以通过自己的一些努力来修复。
然而,有时候我们可能会面临一些复杂的问题,这时候传统维修方法就不再适用了。
而这正是虚拟维修模拟的用武之地。
虚拟维修模拟是指使用电子设备维修的虚拟实验室来模拟真实的故障场景并进行维修。
通过这种模拟的方式,维修人员能够在没有真实设备的情况下进行实际的维修操作。
在虚拟维修模拟中,我们可以模拟出各种各样的故障,从软件问题到硬件故障,再到复杂的电路故障,都能够通过虚拟维修模拟来解决。
虚拟维修模拟的好处不言而喻。
首先,它可以大大节省维修成本。
传统的维修方法需要购买各种维修工具和设备,而虚拟维修模拟不需要这些。
而且,通过虚拟维修模拟,维修人员能够事先了解到具体的故障情况,可以提前准备相应的维修材料和工具,避免浪费资源和时间。
其次,虚拟维修模拟可以提高维修效率。
在传统的维修方法中,维修人员需要亲自前往现场,分析故障原因,然后进行维修。
这个过程可能需要花费很长时间,尤其是在处理复杂故障时。
而通过虚拟维修模拟,维修人员只需要在电脑上进行模拟实验,即可找出故障原因并进行维修。
这样可以大大提高维修效率,缩短维修时间。
另外,虚拟维修模拟还可以提高维修的准确性。
在模拟实验中,维修人员可以对不同故障进行多次尝试,找到最佳的维修方案。
而在传统的维修方法中,一旦维修操作出错,可能会导致设备的二次损坏。
通过虚拟维修模拟,可以降低这种风险,提高维修准确性。
虽然虚拟维修模拟带来了很多便利,但是也存在一些挑战与限制。
首先,虚拟维修模拟的准确性还需要进一步提高。
由于设备和软件的不断更新,新的故障形式不断出现,虚拟维修模拟需要不断更新和改进,才能保证维修的准确性。
其次,虚拟维修模拟的学习成本相对较高。
维修人员需要学习如何操作虚拟实验室软件,了解其中的各种维修技巧和方法。
基于虚拟现实的装备设备拆解与维修培训模拟系统研究

基于虚拟现实的装备设备拆解与维修培训模拟系统研究近年来,随着科技的不断发展,虚拟现实技术在各个领域中得到了广泛应用。
在装备设备拆解与维修培训方面,虚拟现实技术也被越来越多地应用于培训模拟系统的研究和开发中。
本文将探讨基于虚拟现实的装备设备拆解与维修培训模拟系统研究,并分析此系统的应用前景和未来发展趋势。
一、虚拟现实技术在装备设备拆解与维修培训中的应用装备设备拆解和维修是一项非常繁琐复杂的工作,学习和掌握这一技能需要长时间的实践和经验积累。
而虚拟现实技术的出现,为这一过程带来了前所未有的便利。
通过虚拟现实技术,学生可以在电脑屏幕或虚拟现实设备上直接体验拆解和维修的工作流程,避免实际操作中因为一些常见的错误而造成的危害。
同时,在实操时,也可以更加安全和可靠的操作,降低风险和成本。
二、基于虚拟现实的装备设备拆解与维修培训模拟系统的研究基于虚拟现实的装备设备拆解与维修培训模拟系统是一种基于计算机模拟技术的培训系统,它通过将真实的装备设备场景和虚拟技术进行结合,实现了模拟真实设备的操作和环境。
该系统可以模拟电气、机械、液压等各种设备的维修和调试操作,让用户不需要实际进行维修就能够掌握其操作方法。
该系统的研发过程需要采用虚拟现实技术、三维建模软件、计算机图形学技术等,实现设备的建模、真实场景的制作、物理引擎、交互操作等。
三、基于虚拟现实的装备设备拆解与维修培训模拟系统的应用前景基于虚拟现实的装备设备拆解与维修培训模拟系统的应用前景非常广阔。
在大型工业企业培训和职业技能教育中,可以利用该系统进行培训。
此外,在现代军事、医疗和其他一些领域中也可以应用该系统进行培训。
此外,虚拟现实技术还可以帮助企业提高效率、降低成本,促进产品的研发和制造。
四、基于虚拟现实的装备设备拆解与维修培训模拟系统的未来发展趋势在未来的发展中,基于虚拟现实的装备设备拆解与维修培训模拟系统将会越来越普及和完善。
技术不断改进和进步,模型和场景的真实性和逼真程度也会不断提高。
基于虚拟样机的拆除机器人工作装置设计与运动学仿真
长安 大学 道 路施工 技术 与装 备教 育部重点 实验室 张 燕飞/ H Z ANG Y ne a fi 司癸  ̄/I uma 孟 小净/ NG Xioig PS i o G ME aj n
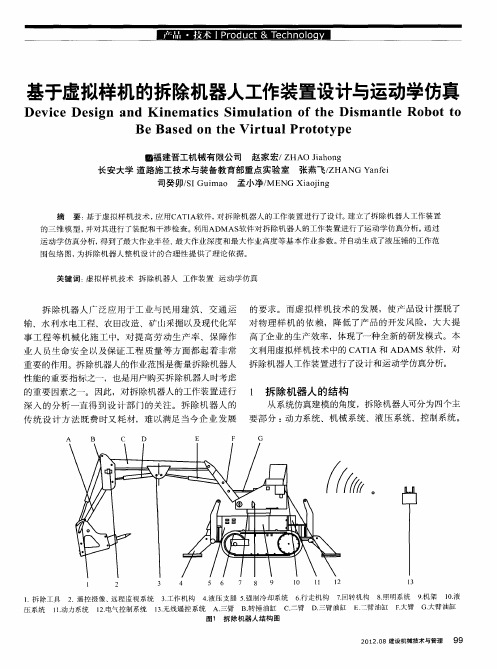
摘 要 : 于 虚 拟 样 机 技 术 , 用 C T A 件 , 拆 除 机 器 人 的 工作 装 置 进 行 了设 计 。 立 了拆 除机 器 人 工 作 装 置 基 应 A I软 对 建 的三 维 模 型 , 对 其 进 行 了装 配 和 干涉 检 查 。利用 AD AS 件 对 拆 除机 器 人 的 工作 装 置 进 行 了运 动学 仿真 分 析 。 过 并 M 软 通
动力系统 、机械 系统 、液压 系 统、控制系统 。 传 统设 计 方 法 既费 时又耗 材 ,难 以满足 当今 企 业 发展 要部 分 :
A B C D E
1 拆 除工具 .
2 遥控 摄像、 . 远程 监视系统
3 . 工作机 构 4 . 支腿 5 液压 . 强制冷 却系统
A. 三臂 B. 转锤 油缸 图1 拆除机器人结构 图
格式一样 , 文件后 缀名该为 x t t然后就 可以导入 将 mt x ,
AD AMS环 境 中
X 0 1
() 义 刚体 : 据 设 计 意 图,将 不 同 的 运 动 部 2定 根
图4 S E 函 数 示 意 图 TP
件定 义 为不 同 的刚 体, 因本 文研 究 内容 主要 集 中在 工
运动学仿 真分析, 得到了最大作业半 径、 最大作业深度和最大作业高度等基本 作业参 数。 自动生成了液压锤 的工作范 并
围包 络 图 , 拆 除机 器 人 整 机 设 计 的合 理 性 提 供 了 理 论 依 据 。 为
基于参数化动作描述的虚拟维修过程仿真

基于参数化动作描述的虚拟维修过程仿真王丰产;孙有朝【摘要】Parameterized Action Representation (PAR) designed to bridge the gap between natural language instructions and the virtual agents who are to carry their action for virtual maintenance process. PAR is therefore constructed based jointly on implemented motion capabilities of virtual human or agent action for instruction interpretation. Maintenance Task Decomposition Model and Actions Database (Action-DB) is presented based on the PAR and Intelligent Virtual Maintenance Training System in Delmia environment in this paper. And a real time execution architecture controlling 3D animated virtual human or agent is proposed based on PAR model. Finally, an example is given to verify the simulation process of models and method proposed. And results show that PAR Action-DB is convenient to simulate the virtual maintenance process.%在虚拟人执行维修动作的过程中,参数化动作描述起到了虚拟人动作和自然语言维修指令之间的桥梁作用,是为了规范虚拟人执行维修任务动作.论文在参数化动作描述和智能虚拟维修训练环境的基础上,构建了维修任务分解模型和动作库;以参数化动作描述为基础,提出了用于3D虚拟人维修动作仿真的虚拟维修实时执行层次结构.最后,通过某型起落架维修任务对参数化动作和仿真架构可行性进行验证,结果表明,基于参数化动作描述描述的动作库可以很方便的进行维修过程仿真.【期刊名称】《图学学报》【年(卷),期】2013(034)002【总页数】6页(P119-124)【关键词】虚拟维修;虚拟现实;动作库;维修过程仿真;参数化动作描述【作者】王丰产;孙有朝【作者单位】南京航空航天大学民航学院,江苏南京210016;武警杭州士官学校,浙江杭州310000;南京航空航天大学民航学院,江苏南京210016【正文语种】中文【中图分类】TH16;TP391维修是指为系统、装备或产品保持或恢复到能执行所需功能的状态所进行的全部技术措施和管理活动,通过执行恢复产品性能的操作,使其达到或接近于新产品状态的操作过程[1],是产品使用寿命周期中重要活动。
潜艇电机吊装路径规划及虚拟维修仿真分析

的缺 陷并做 出调整,克服 了制造虚拟样机 的缺 陷。文章针对潜艇进坞维修时 ,电机 吊装 出 舱过程
进行 虚拟 仿 真 ,首先 对 吊装 路 径进行 规 划 ,然后 对 吊装 过 程进行 虚 拟仿 真 ,最后 对虚 拟仿 真过 程
进行 分析 ,验 证 了电机 吊装 路径 的 可行 性 。 关键词 :潜艇 ; 吊装 ;路 径 规 划 ;虚拟仿 真 ;维修 中图分类号 :U 6 7 2 文献标志码 :C 文章编号:1 0 0 1— 8 3 2 8( 2 0 1 3 )0 l 一 0 0 4 7— 0 3
o u t t h e d e s i g n s h o r t c o mi n g s a t e v e r y s t a g e . Th u s, t h e d i s a d v a n t a g e s a l ma n u f a c t u r e c o u l d b e o v e r — c o me. T he p a p e r e mu l a t e s t h e p r o c e s s t ha t t he e l e c t ic r i t y e n g i n e i s l i f t e d o u t f r o m t h e s u b ma ine r wh e n i t i s ma i n — r a i n e d a t d o c k, a n a l y s e s t h e ma i n t e n a n c e a nd v a l i da t e s t h e f e a s i b i l i t y o f t h e p a t h.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
华中科技大学
硕士学位论文
虚拟维修拆卸过程规划与仿真
姓名:李小俊
申请学位级别:硕士
专业:机械设计及理论
指导教师:王峻峰;李世其
2011-01-15
摘要
采用虚拟现实技术可以提升维修训练的水平,解决传统维修培训手段落后的情况。
论文通过对虚拟维修拆卸过程规划与仿真系统的关键技术的研究,构建了虚拟维修拆卸过程规划与仿真的原型系统,为虚拟维修训练和仿真提供辅助平台。
针对虚拟维修场景的构建问题,给出了虚拟维修场景开发的两种策略,针对CAD 系统与VR现实系统的不完全兼容问题,研究了模型的转换技术和模型优化技术。
在分析国内外学者对拆卸序列规划的研究上,研究了基于零件约束关系的Petri网拆卸序列规划,对模型特性进行了分析和验证,用获得的拆卸序列建立拆卸序列数据链表,存储零件的信息。
在拆卸序列规划的基础上,研究了在EON环境下的拆卸路径规划问题,为了保证拆卸过程的有效性,实时进行碰撞检测,记录拆卸路径关键点,将路径关键点的信息赋给拆卸序列数据链表,为拆卸过程的仿真提供支持,研究了虚拟维修系统的场景和对象的交互控制问题,设计了TPO视点变化函数,根据维修对象的拆卸行为建立视点变化模型,设计了拆卸对象六自由度运动交互控制方法。
最后,对上述各种技术研究之后,利用虚拟现实开发平台EON Studio5.0和VC++6.0高级编程语言及Script脚本在Windows XP系统上对原型系统进行了初步开发,这个原型系统可以完成虚拟维修拆卸的典型技术环节,像模型的加载,拆卸路径规划,拆卸过程仿真等。
关键词:虚拟维修;场景构建;拆卸规划;过程仿真;
Abstract
Virtual reality technology can increase the level of maintenance training to solve the current laggard situation. In the thesis the key technologies are studies for virtual maintenance disassembly process planning and simulation system. A prototype system is built for to provide supporting platform for virtual maintenance training and simulation.
For the problem of the scene construction for the virtual maintenance, two strategies are gived in the thesis for virtual maintenance scene development .To the not fully compatible of the CAD system and the VR system, model transformation and model optimization are studied in the thesis.
Petri net disassembly sequence planning is studied based on constraints between components. A data list of disassembly sequence is established with the model characteristics. Disassembly path planning is based on EON. In order to ensure the feasibility of disassembly process, real-time collision detection and key points record of the path are performed in the disassembly process. The information of the path key points is assigned to disassembly sequence data list and used to support disassembly process simulation. The interaction control of scenarios and virtual maintenance object in a virtual maintenance system are also studied, such as designing the function about the view changes of TPO and designing the interact control of the object by six degrees of freedom.
A preliminary prototype is developed by using the virtual reality development platform EON Studio 5.0, VC and Script programming language under the Windows XP system. This System can implement some representative function of Virtual maintenance disassembly such as model loading, disassembly path planning, and disassembly process simulation and so on.
Keywords:Virtual maintenance; scene construction; disassembly plan; process simulation;。