机构的组成原理.共103页
合集下载
平面机构的组成原理
平面机构的组成原理嘿,咱今儿就来聊聊平面机构的组成原理。
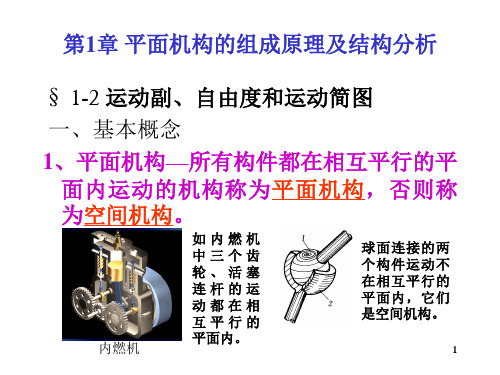
你看啊,这平面机构就像是一个神奇的大拼图!一个个零件就像是拼图的小块,它们组合在一起,就能变出各种奇妙的功能。
比如说连杆吧,那就是拼图里的关键一块。
它能把不同的部分连接起来,让它们协调工作。
就像咱家里的各种家具,椅子腿和椅子面靠啥连接呀,不就是一些连接的部件嘛,这和连杆的作用差不多呢!还有凸轮,这玩意儿可有意思了。
它能让其他部件按照它设定的规律动起来,就好像是一个指挥家,指挥着其他“乐器”奏响美妙的乐章。
想象一下,要是没有凸轮的指挥,那整个机构不就乱套啦?再说说齿轮,那简直就是力量的传递者呀!大齿轮带着小齿轮转,小齿轮又能带动其他的东西动起来。
这不就跟咱接力跑步似的,一个人传给下一个人,力量就这么传递下去啦。
还有铰链呢,它就像是让门能开关自如的那个小部件,给机构带来了灵活性。
没有它,很多动作可就没法实现咯。
这些零件呀,各自有各自的特点和作用,它们相互配合,才能让平面机构发挥出最大的功效。
就像咱一个团队,每个人都有自己的专长,大家一起努力,才能把事情做好。
你想想,要是连杆不结实,那会不会在关键时刻掉链子呀?要是凸轮设计得不合理,那整个机构的动作不就乱七八糟啦?所以呀,每个部分都得精心设计、精心挑选。
咱生活中到处都能看到平面机构的影子呢。
比如自行车,那里面的链条、齿轮啥的,不就是平面机构在发挥作用嘛。
还有各种机器设备,哪个离得开平面机构呀。
总之呢,平面机构的组成原理可重要啦,它就像是打开神奇机械世界大门的钥匙。
只要咱掌握了这把钥匙,就能创造出各种各样有趣又实用的东西。
你说是不是很神奇呢?咱可得好好研究研究,说不定哪天咱自己也能捣鼓出个厉害的小发明呢!。
机构的组成原理

(5) RPP杆组
(4) PRP杆组
(3) RPR杆组
除Ⅱ级杆组外,还有 Ⅲ、Ⅳ级等较高级的 基本杆组。
这是Ⅳ级杆组——由4个构件6个低副 组成,有4个内副。
这是Ⅲ级杆组——由4个构件6个低副 组成,具有一个3副构件,而每个内 副所连接的分支是双副构件。
例:牛头刨床主机构的组成原理
E5
E5
4D
2
B 3
6
A1
C
a)
E5
4D
6
A1
2 B
3
C
4D
牛头刨床主机构
62A 1 B 3 C b)
三、平面机构的结构分析 目的:通过分析机构的组成来确定机构的级别。 机构的级别取决于该机构能够分解出的基本杆组的最
高级别。 机构结构分析的步骤是: 1) 计算机构的自由度,确定原动件。 2) 从远离原动件的地方开始拆杆组。先试拆Ⅱ级
通常把这样的从动件组称为:基本杆组
基本杆组的概念非常重要,它是机构分析的 重要的理论基础。
机构的组成原理:任何机构都可以看作是由 若干个基本杆组依次连接于原动件和机架上 所组成的。
如果基本杆组的运动副全 为低副,则基本杆组自由 度的计算公式为:
由于活动构件数n和低副 数Pl都必须是整数,所以 n应是 2的倍数, Pl应是 3的倍数。
基本杆组的类型
也就是说,在一个基本杆组中,其构件数和低副数有以下关系: n=2, Pl=3 n=4, Pl=6 n=6, Pl=9
F=3n-2Pl=0
n=2Pl /3
(2) RRP杆组
(1) RRR杆组
最简单的平面基本杆组是由两个构件三个低副组成的杆组,称之为Ⅱ级 杆组。 Ⅱ级杆组是机构中最常见的一类基本杆组。 Ⅱ级杆组有以下五种形式:
机械原理 第1章-平面机构
28
F 3 7 2 10 1
F 3 10 2 14 2
教本P25题1-27 a,b,c----求自度
F 3 7 2 10 1
29
F=3*6-2*8-1=1
注意有局部自由度, 大小凸轮是同一体 F=3*9-2*12-2=1
F=3*4-2*4-2=2
F 3 4 2 5 2
上图中,机构的自 由度为:F 33 2 4 源自1上图中,机构的自由 度为:
而主动件数2,F小 于 2 ,当主动件 1 和 3 都如图转动时,杆 件 2 可能损坏,其运 动也不能确定。
F 3 4 2 6 0
自由度为0,机构变 成了桁架,它的构件 之间不可能产生相对 运动。
从上图中可看出,高副低代构件都是包含一个构件两个低副,总的自由试 19 是-1,即限制了一个自由度,相当于一个高副。
高副低代例
图1-17 高副低代
图1-18高副低代 应注意,这些替代 中,只是在此瞬时 位置是正确的,如 果变化位置,则替 代也要发生变化。 另外替代后,活动 构件数和运动副数 与原构件也可能变 化了。
(b)去除局部自由度和虚 约束后的运动简图
F 3 8 2 1111 1
16
椭圆仪的虚约束分 析:不管什虚约束,首 先要把不起约束作 用的构件找出来,这 个构件就是虚约束, 然后去掉这个构件 来计算自度. 右图中,由于 AB=DB=BC,所以当 AB杆绕A点转动 时,C点始终会沿X线 移动,所以滑块3对C 图1-13 椭圆仪 点不起约束作用,滑 块3是虚约束去掉.这活动构件有:滑块4,杆2,杆1,即n=3;转动副 有A 、B、D,移动副有4(滑块),即PL=4,这样椭圆仪的 17 自由度:F=3n-2PL-PH=3*3-2*4=1
F 3 7 2 10 1
F 3 10 2 14 2
教本P25题1-27 a,b,c----求自度
F 3 7 2 10 1
29
F=3*6-2*8-1=1
注意有局部自由度, 大小凸轮是同一体 F=3*9-2*12-2=1
F=3*4-2*4-2=2
F 3 4 2 5 2
上图中,机构的自 由度为:F 33 2 4 源自1上图中,机构的自由 度为:
而主动件数2,F小 于 2 ,当主动件 1 和 3 都如图转动时,杆 件 2 可能损坏,其运 动也不能确定。
F 3 4 2 6 0
自由度为0,机构变 成了桁架,它的构件 之间不可能产生相对 运动。
从上图中可看出,高副低代构件都是包含一个构件两个低副,总的自由试 19 是-1,即限制了一个自由度,相当于一个高副。
高副低代例
图1-17 高副低代
图1-18高副低代 应注意,这些替代 中,只是在此瞬时 位置是正确的,如 果变化位置,则替 代也要发生变化。 另外替代后,活动 构件数和运动副数 与原构件也可能变 化了。
(b)去除局部自由度和虚 约束后的运动简图
F 3 8 2 1111 1
16
椭圆仪的虚约束分 析:不管什虚约束,首 先要把不起约束作 用的构件找出来,这 个构件就是虚约束, 然后去掉这个构件 来计算自度. 右图中,由于 AB=DB=BC,所以当 AB杆绕A点转动 时,C点始终会沿X线 移动,所以滑块3对C 图1-13 椭圆仪 点不起约束作用,滑 块3是虚约束去掉.这活动构件有:滑块4,杆2,杆1,即n=3;转动副 有A 、B、D,移动副有4(滑块),即PL=4,这样椭圆仪的 17 自由度:F=3n-2PL-PH=3*3-2*4=1
01-05 平面机构的组成原理和结构分析

由图可见,当机构运动时,距离 AO1 、O1O2 均保持不变,因 而此机构可用铰链四杆机构来替代,如1-26b所示。其时,高副C
在这用构件4和位于的两个低副代替了。
1.5 平面机构的组成原理和结构分析
图1-26 高副机构
1.5 平面机构的组成原理和结构分析
上述方法可推广到各种平面高副。例如图2-27a中的具有任 意曲线轮廓的高副机构,可通过接触点C作公法线n-n,在公法 线上找出两轮廓曲线在接触处的曲率中心 O1 和 O2 ,并作为 替代构件的两个转动副,再联接 AO1 和 BO 2 便可得到高副低代
级杆组;依次类推。一般机构中,Ⅱ、Ⅲ级杆最为普遍,其结
构型式如图1-20和1-21所示。
1.5 平面机构的组成原理和结构分析
b
c
d
e a
f
g
h 图1-21 Ⅱ级杆组
i
1.5 平面机构的组成原理和结构分析
a
b
c
d 图1-21 Ⅲ级杆组
e
1.5 平面机构的组成原理和结构分析
2.机构的组成原理 把若干个基本杆组依次联接到原动件和机架上,就可组成 一个新的机构,其自由度数与原动件数目相等。这就是机构的 组成原理。
径为零,所以曲率中心与两构件的
接触点C重合,其瞬时代替机构如 图1-28b所示。
图1-28 尖底从动件盘型凸轮
1.5 平面机构的组成原理和结构分析
(2)若高副两元素之一为一直线,如图1-29a所示,则因 直线的曲率中心在无穷远处,所以这一端的转动副将转化为移 动副。其瞬时代替机构如图1-29b或1-29c所示。
如图1-22中,将图b所示的Ⅱ级组2-3并接在图a所示原动
件1和机架4上便得到图c所示的四杆机构;再将图d所示Ⅲ级组5 -6-7-8并接在Ⅱ级组和机架上,即得图e所示八杆机构。
机械原理——第2章 机构的的组成及结构分析
2
1 1 2
2
1
2 1 2
1
1 1
2
1
2
1
2
1
2
1
2
2 1
1 2
3. 运动链
运动链-两个以上的构件通过运动副的联接 而构成的系统。 工业 机器人
闭式链、
开式链
4. 机构能够用来传递运动和动力的可动装置。 机架-作为参考系的构件,如机床床身、车辆 底盘、飞机机身。
原(主)动件-按给定运动规律运动的构件。 从动件-其余可动构件。
⑦已知:AB=CD=EF,计算图示平行四边形 机构的自由度。 B C 2 E 解:n= 4, PL= 6, PH=0 1 F=3n - 2PL - PH 4 3 =3×4 -2×6 F D A =0 3.虚约束 --对机构的运动实际不起作用的约束。 计算自由度时应去掉虚约束。 ∵ FE=AB =CD ,故增加构件4前后E 点的轨迹都是圆弧,。 增加的约束不起作用,应去掉构件4。
1.杆组的各个外端副不可以同时加在同
一个构件上,否则将成为刚体。如:
2.机构的级别与原动件的选择有关。
§2-8 平面机构中的高副低代
高副低代:为了使平面低副机构的结构分析和运动
分析的方法能适用于含有高副的平面机构,根据一 定条件将机构中的高副虚拟地以低副代替的方法。 高副低代条件:
1、代替前后机构的自由度不变
一般构件的表示方法
杆、轴构件
固定构件
同一构件
一般构件的表示方法
两副构件
三副构件
注意事项:
画构件时应撇开构件的实际外形,而只考虑运动副的性质。
常用机构运动简图符号
在 机 架 上 的 电 机 带 传 动 齿 轮 齿 条 传 动 圆 锥 齿 轮 传 动
第一章机构的组成与结构

机构是具有确定运动的运动链。
原动件
从动件
机架 低副机构
高副机构
开式链机构
闭式链机构
思考题:
① 何谓“零件”和“构件”?试举例说明其区别。 ② “构件是由多个零件组成的”,“一个零件不能成为
构件”的说法是否正确? 构件和零件的本质区别是什么? ③ 何谓“运动副”? 满足什么条件两个构件间才能构成运
P5 = 3n/2 n 只能取偶数!
n=2
P5 = 3 Ⅱ级杆组(双杆组)
3 P5 = n
2
n = 4 P5 = 6 Ⅲ 级杆组
3 P5 = n
2
三副构件 3个双副构件
1.4.1 机构的组成原理
机构
机架 原动件 若干基本杆组
机构的组成原理:若干个自由度为零的基本杆组依次联接到原动机和
机架上构成机构;机构的自由度等于原动件的数目。
3 按照运动副引入的约束数目分类 n 级副 n = 1, 2 … 5
4 按照运动副接触部分的几何形状分类 圆柱副、平面与平面副、球面副、螺旋副、球面与平面副等
R
按接触部分的几何形状分类:转动副 按接触形式分类: 低副 按引入的约束数目分类:五级副 按相对运动形式分类:平面运动副
P
按接触部分的几何形状分类:移动副
按接触形式分类: 低副
?
按引入的约束数目分类:五级副
按相对运动形式分类:平面运动副
按接触形式分类: 高副 按引入的约束数目分类: 四级副 按相对运动形式分类: 平面运动副 按接触部分的几何形状分类: 平面高副
1.1.3 运动链
运动链:两个或两个以上的构件通过运动副联接而构成的系统
A
B
杆式联轴器
原动件
从动件
机架 低副机构
高副机构
开式链机构
闭式链机构
思考题:
① 何谓“零件”和“构件”?试举例说明其区别。 ② “构件是由多个零件组成的”,“一个零件不能成为
构件”的说法是否正确? 构件和零件的本质区别是什么? ③ 何谓“运动副”? 满足什么条件两个构件间才能构成运
P5 = 3n/2 n 只能取偶数!
n=2
P5 = 3 Ⅱ级杆组(双杆组)
3 P5 = n
2
n = 4 P5 = 6 Ⅲ 级杆组
3 P5 = n
2
三副构件 3个双副构件
1.4.1 机构的组成原理
机构
机架 原动件 若干基本杆组
机构的组成原理:若干个自由度为零的基本杆组依次联接到原动机和
机架上构成机构;机构的自由度等于原动件的数目。
3 按照运动副引入的约束数目分类 n 级副 n = 1, 2 … 5
4 按照运动副接触部分的几何形状分类 圆柱副、平面与平面副、球面副、螺旋副、球面与平面副等
R
按接触部分的几何形状分类:转动副 按接触形式分类: 低副 按引入的约束数目分类:五级副 按相对运动形式分类:平面运动副
P
按接触部分的几何形状分类:移动副
按接触形式分类: 低副
?
按引入的约束数目分类:五级副
按相对运动形式分类:平面运动副
按接触形式分类: 高副 按引入的约束数目分类: 四级副 按相对运动形式分类: 平面运动副 按接触部分的几何形状分类: 平面高副
1.1.3 运动链
运动链:两个或两个以上的构件通过运动副联接而构成的系统
A
B
杆式联轴器
机构的组成原理及性能分析
2
二维四杆机 构2.aif 二维五杆机 构.aif
3 4 5
1 ϕ1
F = 3 ×4 – ×5 = 2
F = 3×3–2×4=1 2
1
3× F = 3 ×2 – 2 ×3 = 0 桁架) (桁架)
3
2 4
3× F = 3 ×3 – 2 ×5 = - 1 超静定桁架) (超静定桁架)
三、机构可动的运动学条件
(二)运动副
运动副:机构中两构件直接接触的可动联接。 运动副:机构中两构件直接接触的可动联接。 1、根据运动副的接触形式: 、根据运动副的接触形式: 1)低副:面接触的运动副。如转动副、移动副。 )低副:面接触的运动副。 转动副、移动副。 2)高副:点或线接触的运动副。如齿轮副、凸 )高副:点或线接触的运动副。 齿轮副、 轮副。 轮副。 2、根据组成运动副的两构件间的相对运动: 、根据组成运动副的两构件间的相对运动: 1)平面运动副:组成运动副两构件间作相对平 )平面运动副: 面运动,如转动副、移动副、凸轮副、齿轮副。 面运动,如转动副、移动副、凸轮副、齿轮副。 2)空间运动副:组成运动副两构件间作相对空 )空间运动副: 间运动。如圆柱副,球面副。 间运动。如圆柱副,球面副。
二维车轮联动 装置
F
F = 3×1–2×2 = -1 × × 拿掉一个F 的自由度, 拿掉一个F = -1的自由度,即去掉一个约束
E
3、常见的虚约束 、
1) 机构中某两构件用转动副相联的联结点,在 机构中某两构件用转动副相联的联结点, 未组成运动副之前, 未组成运动副之前,其各自的轨迹已重合为 则此联结带入的约束为虚约束。 一,则此联结带入的约束为虚约束。
(三)运动链:用运动副连接而成的相对可动的 运动链: 构件系统。 构件系统。
机械原理-第2章机构的结构分析(机构的组成原理和机构类型综合1-1
z
y
x
I级副 II级副 III级副
(3)运动副的分类
1)按引入的约束数分有:I级副、II级副、III级副、IV级 副、V级副。 提供4个约束条件的,称为Ⅳ级副,提供5个约束条 件的,称为Ⅴ级副。
z
y x
IV级副
V级副-1 V级副-2 V级副-3
(3)运动副的分类
2)按运动副接触形式分有
低副:面接触的运动副;
3.机构示意图
不按精确比例绘制的机构简图。 机构运动简图符号已经有国家标准,该标准对运 动副、构件及各种机构的表示符号作了规定,下表为 构件与部分机构的表示方法。
4.表示构件的符号
固 定 构 构 件
件 同 一 构 件
4.表示构件的符号
双 构 副
件 三 副
常用机构运动 简 图 符 号
机构的真实运动仅与机构中的运动副的机构情况
3 2
作者:潘存云教授
1 4
偏心真空泵的运动简图
例
绘制图示牛头刨床机构的运动简图
1 机架
2.3 齿轮
4 滑块
5 导杆
6 连杆
7 刨头
解: (1)从主动件开始,按运动 传动顺序,分析各构件之间相对 运动性质,并确定联接各构件的 运动副类型。 (2)合理选择视图。本题选 择与各回转轴线垂直的平面作为 视图平面。 (3)合理选择长度比例尺 (m/mm),绘制机构运动简图。
机构的组成:机构=机架+原动件+从动件
1个 1个或几个 若干
5.绘制机构运动简图的步骤
①分析机构中原动件与运动 传递路线,构件的数目,相 邻构件之间的运动副类型与 数目; ②选视图平面(选与运动平面 平行的平面),测量各运动副 之间的尺寸,绘制示意图; ③确定各运动副之间的相对位 置,选取适当比例尺,画出相 应的运动副符号,用构件符号 将各运动副连接起来。
y
x
I级副 II级副 III级副
(3)运动副的分类
1)按引入的约束数分有:I级副、II级副、III级副、IV级 副、V级副。 提供4个约束条件的,称为Ⅳ级副,提供5个约束条 件的,称为Ⅴ级副。
z
y x
IV级副
V级副-1 V级副-2 V级副-3
(3)运动副的分类
2)按运动副接触形式分有
低副:面接触的运动副;
3.机构示意图
不按精确比例绘制的机构简图。 机构运动简图符号已经有国家标准,该标准对运 动副、构件及各种机构的表示符号作了规定,下表为 构件与部分机构的表示方法。
4.表示构件的符号
固 定 构 构 件
件 同 一 构 件
4.表示构件的符号
双 构 副
件 三 副
常用机构运动 简 图 符 号
机构的真实运动仅与机构中的运动副的机构情况
3 2
作者:潘存云教授
1 4
偏心真空泵的运动简图
例
绘制图示牛头刨床机构的运动简图
1 机架
2.3 齿轮
4 滑块
5 导杆
6 连杆
7 刨头
解: (1)从主动件开始,按运动 传动顺序,分析各构件之间相对 运动性质,并确定联接各构件的 运动副类型。 (2)合理选择视图。本题选 择与各回转轴线垂直的平面作为 视图平面。 (3)合理选择长度比例尺 (m/mm),绘制机构运动简图。
机构的组成:机构=机架+原动件+从动件
1个 1个或几个 若干
5.绘制机构运动简图的步骤
①分析机构中原动件与运动 传递路线,构件的数目,相 邻构件之间的运动副类型与 数目; ②选视图平面(选与运动平面 平行的平面),测量各运动副 之间的尺寸,绘制示意图; ③确定各运动副之间的相对位 置,选取适当比例尺,画出相 应的运动副符号,用构件符号 将各运动副连接起来。
第2章机械原理 机构的组成及结构分析
3
2 1
错
移动副导路平行 结论:在计算机构自由 转动副轴线重合 度时,虚约束应先去除 平面高副接触点共法线 不计
“移动副”
“转动副”
A
B
F=3n-2PL-PH =3 3-2 4- 0 =1
F=3n-2PL-PH =3 2-2 2-1 =1
A
B
转动副轴线重合——两构件有多
处接触而构成转动副且转动轴线相互 重合时,只有一个转动副起约束作用, 如右图,曲轴的两转动副A 、B之一为
运动副元素——两构件相互接触的点、线、面。
运动副分类: 1、按运动副两构件接触的特性分为低副和高副。
转动副
移动副
特点:面接触、相对转动或相对移动 低副
●
齿轮副
凸轮副
特点:点或线接触、沿接触点切线方向相对移动 绕接触点的转动 高副 2、按运动副两构件间的相对运动是平面还是空间运动分 为平面运动副和空间运动副。
第2章
机构的组成及结构分析
内 容
•构件及其运动副
•机构运动简图的绘制
•平面机构自由度的计算
重 点
•
运动副和运动链的概念、机构运动简图的绘制、
机构具有确定运动的条件及机构自由度的计算。
§2-1 研究机构结构的目的
其目的是:
1、研究组成机构的组成及机构具有确定运动的条件
▲弄清机构包含哪几个部分
▲各部分如何相联? ▲怎样的结构才能保证具有确定的相对运动?
F=3n-2PL-PH =3 2 -2 2 1 - =1
3.注意事项(续) 虚约束 不产生实际约束效果的重复约束
虚约束常发生在下列情况 (1)两构件间构成多个运动副 F=3n-2PL-PH F=3n-2PL-PH =3 2-2 2 1 - =3 2-2 3 1 - =1 对 =-1
2 1
错
移动副导路平行 结论:在计算机构自由 转动副轴线重合 度时,虚约束应先去除 平面高副接触点共法线 不计
“移动副”
“转动副”
A
B
F=3n-2PL-PH =3 3-2 4- 0 =1
F=3n-2PL-PH =3 2-2 2-1 =1
A
B
转动副轴线重合——两构件有多
处接触而构成转动副且转动轴线相互 重合时,只有一个转动副起约束作用, 如右图,曲轴的两转动副A 、B之一为
运动副元素——两构件相互接触的点、线、面。
运动副分类: 1、按运动副两构件接触的特性分为低副和高副。
转动副
移动副
特点:面接触、相对转动或相对移动 低副
●
齿轮副
凸轮副
特点:点或线接触、沿接触点切线方向相对移动 绕接触点的转动 高副 2、按运动副两构件间的相对运动是平面还是空间运动分 为平面运动副和空间运动副。
第2章
机构的组成及结构分析
内 容
•构件及其运动副
•机构运动简图的绘制
•平面机构自由度的计算
重 点
•
运动副和运动链的概念、机构运动简图的绘制、
机构具有确定运动的条件及机构自由度的计算。
§2-1 研究机构结构的目的
其目的是:
1、研究组成机构的组成及机构具有确定运动的条件
▲弄清机构包含哪几个部分
▲各部分如何相联? ▲怎样的结构才能保证具有确定的相对运动?
F=3n-2PL-PH =3 2 -2 2 1 - =1
3.注意事项(续) 虚约束 不产生实际约束效果的重复约束
虚约束常发生在下列情况 (1)两构件间构成多个运动副 F=3n-2PL-PH F=3n-2PL-PH =3 2-2 2 1 - =3 2-2 3 1 - =1 对 =-1
高等机构学第三章 机构结构理论(张)
圆柱平面副(用CE表示,cylindrical even pair)
5) Ⅴ类副:自由度f=5的运动副
Ⅴ类副中,提供1个约束,即C=1。 球平面(SE, sphere even pair)为其代表,
根据Ⅴ类副的自由度特点,通常为空间点接触 高副。
y
x z
二、运动链
若干构件通过运动副的连接而组成的可动构 件系统,称之为运动链。 按构件系统是否封闭,分为闭链系统和开链。 (1)闭链:构成封闭环式的运动链,称为闭链 闭链中,每个构件上至少有2个运动副元素。 闭链中有单环闭链和多环闭链,
例2: 求图示2RH2R机构的自由度
解: 各转动副轴线不共面, R 3
螺旋副派生一个移动副,PP 1
5
F fi 5311 i 1
H
R
R
AR
R
例3: 求图示Sarrus机构的自由度
转动副的轴线平行两个
不同方向,且矢量共面
C
B
R 2 A
转动副(用R表示,revolute pair) 移动副(用P表示,prismatic pair ) 螺旋副(用H表示,helical pair )
2) Ⅱ类副:自由度f=2的运动副
Ⅱ类副中,共提供4个约束,即C=4。
圆柱副 (用C表示,cylindrical pair)
球销副 (用S′表示,slotted spherical pair)
2.空间开链机构的自由度
在开链机构中,可动构件数目与运动副数目相 等。即有n = P,将其代入式上中,可推导出开
链机构的自由度计算公式。
p
F 6n P fi
p
i 1
F fi
i 1
n=P
5) Ⅴ类副:自由度f=5的运动副
Ⅴ类副中,提供1个约束,即C=1。 球平面(SE, sphere even pair)为其代表,
根据Ⅴ类副的自由度特点,通常为空间点接触 高副。
y
x z
二、运动链
若干构件通过运动副的连接而组成的可动构 件系统,称之为运动链。 按构件系统是否封闭,分为闭链系统和开链。 (1)闭链:构成封闭环式的运动链,称为闭链 闭链中,每个构件上至少有2个运动副元素。 闭链中有单环闭链和多环闭链,
例2: 求图示2RH2R机构的自由度
解: 各转动副轴线不共面, R 3
螺旋副派生一个移动副,PP 1
5
F fi 5311 i 1
H
R
R
AR
R
例3: 求图示Sarrus机构的自由度
转动副的轴线平行两个
不同方向,且矢量共面
C
B
R 2 A
转动副(用R表示,revolute pair) 移动副(用P表示,prismatic pair ) 螺旋副(用H表示,helical pair )
2) Ⅱ类副:自由度f=2的运动副
Ⅱ类副中,共提供4个约束,即C=4。
圆柱副 (用C表示,cylindrical pair)
球销副 (用S′表示,slotted spherical pair)
2.空间开链机构的自由度
在开链机构中,可动构件数目与运动副数目相 等。即有n = P,将其代入式上中,可推导出开
链机构的自由度计算公式。
p
F 6n P fi
p
i 1
F fi
i 1
n=P