基于RecurDyn的履带车辆高速转向动力学仿真研究
履带车辆动力学建模及模型试验验证

履带车辆动力学建模及模型试验验证谢欢;王红岩;郝丙飞;王钦龙【摘要】为研究履带车辆的动力学性能,须建立准确的车辆模型.对履带车辆进行了拓扑结构分析,基于RecurDyn环境建立了履带车辆多体动力学模型,采用谐波叠加法对随机路面进行数字化模拟,并通过三维等效容积法建立了三维仿真路面模型.为验证多体动力学模型的可信性,进行了典型障碍和随机道路实车试验,比较了测点处加速度时间历程变化和功率谱估计曲线.结果表明:建立的动力学模型能够较好地反映实车的高频和低频振动特性,为履带车辆的动力学研究提供了模型基础.【期刊名称】《农业装备与车辆工程》【年(卷),期】2018(056)006【总页数】5页(P44-48)【关键词】履带车辆;动力学模型;实车试验;模型验证【作者】谢欢;王红岩;郝丙飞;王钦龙【作者单位】100072北京市陆军装甲兵学院;100072北京市陆军装甲兵学院;100072北京市陆军装甲兵学院;100072北京市陆军装甲兵学院【正文语种】中文【中图分类】TJ8110 引言目前,基于多体动力学方法的虚拟样机技术为履带车辆模型的仿真研究提供了很好的方法途径[1-2]。
进行装甲车辆性能的仿真分析,首先要建立准确的车辆动力学模型,国内许多研究者对此开展了许多卓有成效的工作。
武云鹏[3]使用ATV工具箱在ADAMS环境中建立了履带车辆悬挂系统动力学模型,研究了履带车辆悬挂系统的动力学性能。
韩宝坤[4]等建立了履带车辆基于平稳性能的动力学模型,并与DADS环境下的动力学模型进行了比较,验证了模型的合理性。
王克运[5]等为研究履带车辆越障过程中的动力学性能,建立了其动力学模型,在MATLAB/Simulink环境中对模型进行了仿真。
陈媛媛[6]利用三维建模软件Pro/E和多体动力学软件RecurDyn建立了履带车辆动力学模型,在不同的工况下,研究了履带张紧装置对车辆的机动性和平顺性的影响。
本文以某型履带车辆为研究对象,基于多体动力学软件RecurDyn环境建立履带车辆多刚体系统动力学模型,并通过实车试验对所建履带车辆模型进行验证,为下一步履带车辆动力学性能仿真分析提供较准确的模型。
210979654_基于ADAMS_的履带式挖掘机越障动力学建模与分析
基于ADAMS 的履带式挖掘机越障动力学建模与分析秦仙蓉1 冯亚磊1 沈健花2 张 氢1 孙远韬11同济大学机械与能源工程学院 上海 201804 2惠普信息技术研发有限公司 上海 200131摘 要:履带式挖掘机作业时需跨越各类障碍物,在履带式挖掘机跨越障碍物时会受到来自地面的冲击载荷而产生疲劳破环,故研究履带式挖掘机的整机越障动力学特性十分必要。
基于动力学仿真软件ADAMS,研究了履带式挖掘机的整机越障动力学特性。
以某中型履带式挖掘机为例,在Pro/E 中完成履带式挖掘机的三维建模,在ADAMS 中建立其简化虚拟样机,完成该履带式挖掘机越障的动力学仿真。
结果表明:越障过程中,挖掘机车体垂向最大位移与障碍物设置高度一致,整个越障过程较为平稳。
此外,车体的转动角速度在车体越过障碍边缘到引导轮触地时刻存在较明显的变化过程。
关键词:履带式挖掘机;越障;动力学仿真;虚拟样机中图分类号:U446 文献标识码:A 文章编号:1001-0785(2023)05-0018-05Abstract: In view of the fact that crawler excavators need to cross all kinds of obstacles during operation, and are easily subjected to impact load from the ground, resulting in fatigue damage, it is necessary to study the dynamic characteristics of the whole crawler excavator crossing obstacles. In this study, based on the dynamic simulation software Adams, the dynamic characteristics of the whole crawler excavator are studied. Taking a medium-sized crawler excavator as an example, the three-dimensional modeling of the crawler excavator is completed in ProE, and its simplified virtual prototype is established in Adams, and the dynamic simulation of the crawler excavator crossing obstacles is completed. The results show that the vertical maximum displacement of the excavator body is consistent with the height of the obstacle during the obstacle crossing, and the body is relatively stable during the whole obstacle crossing. In addition, the rotation angular velocity of the excavator changes obviously, which occurs during the period when the excavator travels to the edge of obstacle crossing and the guide wheel touches the ground.Keywords: crawler excavator; obstacle crossing; dynamic simulation; virtual prototype0 引言挖掘机被广泛用在各类土石方开挖工程现场,据不完全统计,土石方施工过程中约60%的土石方开挖都是靠挖掘机来完成的。
基于RecurDyn的履带车辆动力学仿真_骆清国

车辆与动力技术 Vehicle & Power Technology
文章编号: 1009 - 4687(2011)04 - 0026 - 03
总第 124 期
基于 RecurDyn 的履带车辆动力学仿真
骆清国1, 司东亚1, 龚正波1, 赵新军2
( 1. 装甲兵工程学院机械工程系,北京 100072; 2. 北方发动机研究所,大同 037036)
车辆完成加速阶段,达到目标行驶速度后以稳 定车速匀速行驶. 匀速行驶阶段,左右两侧侧减速 器被动轴上测点转矩时域波形如图 5 所示.
为了进一步验证仿真模型的正确性,利用该模 型进行不同速度工况下的虚拟测试,得到相应的转 矩变化情况,并与相同工况下的实车道路试验结果 进行对比分析. 表 1 中给出了实车道路试验采用的 车速大小,在进行仿真时需将该速度转化为施加在 主动轮旋转副上的角速度.
比对,验证了模型的准确性,为下一步实现车辆动力-传动-行动装置联合仿真提供基础.
关键词: 履带车辆; RecurDyn; 多体动力学; 动态转矩
中图分类号: TP391. 9
文献标识码: A
Dynamic Simulation of a Tracked Vehicle Based on RecurDyn
LUO Qing-guo1 ,SI Dong-ya1 ,GONG Zheng-bo1 ,ZHAO Xin-jun2 ( 1. Department of Mechanical engineering of the Academy of Armored Force Engineering,Beijing 100072,China;
图 5 转矩时域波形图
可见,仿真结果比较理想,两侧转矩响应曲线 几乎是吻合的. 图中转矩的波动主要由履带和主动 轮轮齿的啮合造成,且由于仿真模型中,主动轮与 履带销之间是刚性连接,导致仿真输出的转矩幅值 比实测结果要大很多,在平均转矩较小时,会出现 转矩为负的情况. 计算得到左右两侧的平均转矩分 别为 318. 070 N·m、318. 894 N·m.
基于RecurDyn和Simulink的电传动车辆转矩控制策略
2 履带车辆样机模型构建
性提供给车辆行驶不同的法向力 、牵引力和滚动阻 力 。到目前为止 , 尽管车辆地面力学已经取得了很 大的进展 ,但描述地面与车辆相互关系的参量一般 还是采用公认的地面滚动阻力系数 f 、地面附着系 数 φ及地面转向阻力系数μ。本虚拟样机路面模型 充分利用一般的试验统计数据 , 针对仿真需要 , 在 RecurDyn/ HM 模块中定义了水平硬质地面 ,地面附 着系数 φ为 017 , 转向阻力系数 μ 为 0149 , 滚动阻 力系数 f 为 0105[4 ] 。整车动力学模型及路面模型 如图 2 所示 。
或者转速实现[2 ] 。由于车辆的直线行驶稳定性和 转向行驶性能完全依赖于控制策略的优劣 ,因此 ,准 确与实时的控制策略是车辆良好行驶的前提 。
图 1 电传动履带车辆结构框图 Fig. 1 Configuration of t he electric drive tracked vehicle
213 电动机及其控制系统模型 本文研究重点不是电动机驱动系统 , 从工程应
用的角度考虑 ,利用电动机驱动系统试验数据在控 制软件 Simulink 中建立 Look2Up Table 模块 , 利用 查表功能实现驱动系统的响应过程 , 因电动机转动 惯量与整车惯量相比较小 , 对整车动态性能的影响 可以忽略[5 ] 。仿真模型如图 3 所示 。
立的驱动电动机控制系统模型 ,构建了整车虚拟样机 ;分析和建立了转矩控制策略 ,对驾驶员信号进行了解析 ,利
用 Stateflow 建立了控制逻辑 ;在此虚拟样机基础上利用联合仿真的方法对转矩策略进行了仿真和样机试验 ,验证
了转矩控制策略方法的正确性 。
关键词 : 履带车辆 电传动 控制策略 RecurDyn Matlab/ Simulink
履带底盘及驱动系统建模与仿真
湖南农业大学车辆工程专业毕业设计履带底盘及驱动系统建模与仿真Modeling and Simulation of tracked chassis and drive system学生姓名:刘延韬学号:201240670127年级专业及班级:2012级车辆工程(1)班指导老师及职称:李军政教授学院:工学院湖南·长沙提交日期:2016年5月湖南农业大学全日制普通本科生毕业论文诚信声明本人郑重声明:所呈交的本科毕业论文是本人在指导老师的指导下,进行研究工作所取得的成果,成果不存在知识产权争议。
除文中已经注明引用的内容外,本论文不含任何其他个人或集体已经发表或撰写过的作品成果。
对本文的研究做出重要贡献的个人和集体在文中均作了明确的说明并表示了谢意。
本人完全意识到本声明的法律结果由本人承担。
毕业论文作者签名:年月日履带底盘及驱动系统建模与仿真学生:刘延韬指导老师:李军政(湖南农业大学工学院,长沙 410128)摘要:此设计以电脑仿真技术并结合履带底盘及驱动系统的三维模型构建履带行驶系统虚拟实验平台,对坦克车与水底行走车辆的履带行驶系统进行建模,并对其直线行驶性能,爬坡越障性能与转向性能进行软件仿真,对结果进行分析和总结。
此过程中使用了计算机三维图形设计的理论知识、三维建模技术和仿真技术(主要使用软件:pro/E、recurdyn),实现了三维模型建立与仿真分析。
关键词:三维建模;多体运动仿真分析;履带行驶系统建模与仿真;目录履带底盘及驱动系统建模与仿真 (1)前言 (5)1坦克履带车身三维模型制作 (8)1.1使用Pro/E建立坦克履带车车身 (8)装配炮塔与车身 (9)1.2使用recurdyn对履带部分建模 (10)1.2.1创建履带板与驱动轮 (10)1.2.2创建履带行走机构 (12)1.3履带子系统仿真 (14)1.4地面参数的设定 (15)2水底行走履带车建模 (17)3坦克履带车辆仿真分析 (21)3.1坦克履带车软质与硬质地面过坡承重轮受力分析 (21)3.2坦克履带车辆单边转向分析 (22)3.3坦克履带车辆原地转向仿真分析 (23)3.4坦克履带车辆扭矩悬挂仿真 (25)4水底行走履带车仿真分析 (27)4.1直线行走仿真分析 (27)4.2转向行走仿真分析 (29)4.3水底行走履带车爬坡,越沟行走仿真分析 (30)4.4水底行走履带车履带增设悬挂系统 (32)5总结 (34)6书目 (36)前言虚拟现实技术是基于近年来的物体几何建模技术、特征、菜单交互、并行处理、智能化多体系统仿真技术的产物。
轮履复合式底盘研究综述
轮履复合式底盘研究综述刘洋;谢霞;周玄;王亮【摘要】首先,总结了国内外主要轮履复合式底盘研究成果;其次,分析了轮履复合式底盘在结构设计、越障性能及运动分析的研究方法;最后,讨论了轮履复合式底盘研究中存在的不足,为后续轮履复合式底盘发展提供理论支持.【期刊名称】《现代制造技术与装备》【年(卷),期】2019(000)004【总页数】4页(P87-90)【关键词】轮履复合式底盘;结构设计;运动分析【作者】刘洋;谢霞;周玄;王亮【作者单位】中国人民解放军陆军军事交通学院研究生队,天津 300161;中国人民解放军陆军军事交通学院军用车辆系, 天津 300161;96844部队,青海 810001;中国人民解放军陆军军事交通学院研究生队,天津 300161【正文语种】中文随着科学技术飞速发展,传统移动底盘已经无法满足复杂多样的非结构环境要求。
因此,集轮式高机动性和履带式高通过性于一体的轮履复合式底盘成为国内外高校及企业研究的热点。
本文通过对轮履复合式底盘研究成果的回顾,讨论了轮履复合式底盘在结构设计、越障性能及运动分析方面的研究方法,并提出了轮履复合式底盘研究中存在的不足,为未来轮履复合式底盘发展提供了方向。
1 研究现状自20世纪以来,国外许多大学、公司与学者等对轮履复合式底盘展开了深入研究,如卡内基梅隆大学就发明了自适应可变形车轮。
随着制造水平高速发展,轮履复合式底盘得到了国内许多科研单位的关注,如国防科技大学自主研发的四杆摆臂可变形履带移动机构和北京晶品特装科技有限责任公司设计制造的JPRS16小型轮履复合侦查机器人等。
目前,轮履复合式底盘可分为轮履组合式底盘、轮履更换式底盘、可变形履带式底盘和轮履复合变形轮式底盘四种形式。
1.1 轮履组合式底盘考虑到轮式与履带式的不同优点,轮履组合式底盘将轮式与履带式融合到了一起。
1930年,德国博格瓦德公司为了在战场环境下输送人员,研制了一种专门输送人员的Sdkfz251半履带式装甲车,如图1所示。
基于Matlab与RecurDyn的电传动履带车辆的联合仿真
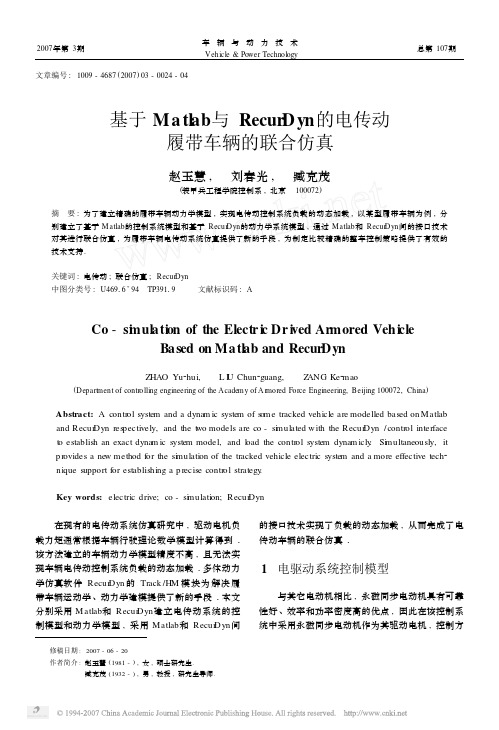
修稿日期:2007-06-20作者简介:赵玉慧(1981-),女,硕士研究生.臧克茂(1932-),男,教授,研究生导师.文章编号:1009-4687(2007)03-0024-04基于M a tl ab 与Recur D yn 的电传动履带车辆的联合仿真赵玉慧, 刘春光, 臧克茂(装甲兵工程学院控制系,北京 100072)摘 要:为了建立精确的履带车辆动力学模型,实现电传动控制系统负载的动态加载,以某型履带车辆为例,分别建立了基于Matlab 的控制系统模型和基于Recur Dyn 的动力学系统模型,通过Matlab 和Recur Dyn 间的接口技术对其进行联合仿真,为履带车辆电传动系统仿真提供了新的手段,为制定比较精确的整车控制策略提供了有效的技术支持.关键词:电传动;联合仿真;Recur Dyn中图分类号:U46916+94 TP39119 文献标识码:ACo -si m ul ati on of the Electr i c Dr i ved Ar mored Vehi cle Based on Matl ab and Recur DynZHAO Yu 2hui, L I U Chun 2guang, Z ANG Ke 2mao(Depart m ent of contr olling engineering of the Acade my of A r mored Force Engineering,Beijing 100072,China )Abstract:A contr ol syste m and a dyna m ic syste m of s o me tracked vehicle are modelled based on Matlab and Recur Dyn res pectively,and the t w o models are co -si m ulated with the Recur Dyn /contr ol interface t o establish an exact dyna m ic syste m model,and l oad the contr ol syste m dyna m icly .Si m ultaneously,it p r ovides a ne w method f or the si m ulati on of the tracked vehicle electric syste m and a more effective tech 2nique support for establishing a p recise contr ol strategy .Key words:electric drive;co -si m ulati on;Recur Dyn 在现有的电传动系统仿真研究中,驱动电机负载力矩通常根据车辆行驶理论数学模型计算得到1该方法建立的车辆动力学模型精度不高,且无法实现车辆电传动控制系统负载的动态加载1多体动力学仿真软件Recur Dyn 的Track /H M 模块为解决履带车辆运动学、动力学建模提供了新的手段1本文分别采用Matlab 和Recur Dyn 建立电传动系统的控制模型和动力学模型,采用Matlab 和Recur Dyn 间的接口技术实现了负载的动态加载,从而完成了电传动车辆的联合仿真11 电驱动系统控制模型与其它电动机相比,永磁同步电动机具有可靠性好、效率和功率密度高的优点,因此在该控制系统中采用永磁同步电动机作为其驱动电机,控制方2007年第3期车辆与动力技术Vehicle &Power Technol ogy总第107期法采用最常见的矢量控制技术[1]1111 电动机数学模型分析正弦波电流控制的调速永磁同步电动机最常用的方法是dq轴数学模型1忽略电动机铁心的饱和,不计电动机中涡流和磁滞损耗且认为电动机电流为对称的三相正弦波电流1则其电磁关系可表示为[1]:u d=R i d+pψd-ωψqu q=R i q+pψq+ωψd,(1)ψd=L d i d+ψfψq =L q i q.(2)其中 Lq,L d为电机q轴、d轴电感;R为电机定子绕组电阻;iq,i d为电机q轴、d轴电流;u q, u d为电机q轴,d轴电压;ω为电机转子角速度; p为电机磁极对数1机械运动方程为:dω/d t=J(T e-T m)/p.(3)其中 J为电机转动贯量;f为电机转动摩擦系数; T m为负载转矩;T e为电机电磁力矩1112 矢量控制矢量控制实际上是对电动机定子电流矢量相位和幅值的控制1由式(1)、(2)知,电动机的力矩取决于定子电流的空间矢量is,而i s的大小和相位又取决于is 和iq,即控制i d和i q便可控制电动机的力矩1通过这两个电流的控制,使实际id 和iq跟踪指令值i3d 和i3q,从而实现电动机力矩和转速的控制1为了充分发挥电机低速时的最大力矩,当控制系统处于恒力矩调速区时采用最大力矩/电流控制,为了使电动机能恒功率运行于更高的转速,当控制系统调速范围处于恒功率调速区时采用弱磁控制1113 电传动控制系统电传动系统控制简图如图1所示:ω和θ为检测出的电动机转速和角速度空间位移1检测到的转速与指令值比较后的偏差作为速度控制器的输入1速度控制器的输出即为力矩的指令值,力矩指令值作为力矩控制器的输入,根据前述的控制策略计算定子电流分量i3d 和i3q,经过矢量逆变换后即可得到电动机三相电流的指令值,采用滞环P WM电流控制实现流跟踪,从而实现电动机的控制1图1 永磁同步电动机传动系统简图2 负载模型为了提高该控制系统动力学模型的精度,系统使用Recur Dyn软件对整车行动部分多体动力学系统进行建模1Recur Dyn软件提供了高速履带系统工具包———Track/H M,其中包括各种履带系统组件,如主动轮、诱导轮、负重轮、托带轮、高速履带等1使用这些组件可以实现对车辆行动部分的精确建模1同时,Recur Dyn软件提供了Gr ound模块,用于建立各种地面模型1211 履带车辆行动部分建模某型履带车辆模型如图2所示1图2 履带车辆模型该模型含有左右侧两条履带子系统1每条履带系统由1个主动轮、1个诱导轮、6个负重轮、3个拖带轮和82块履带板组成,主动轮前置,采用双销式履带1履带系统中的所有轮子均与车体相连1主动轮、诱导轮、拖带轮及负重轮均以一个旋转副与车体相连,可以有相对车体的运动,悬挂系统采用扭杆式独立悬挂1在该模型中整车共有1 024个自由度、47个约束1建模时选取主动轮中心为固定坐标系,履带系统则相对于车体参考系,而属于履带系统的实体则相对履带系统参考系,车体参考位置及方向在全局坐标系中定义1由于履带电传动车辆是由永磁同步电机的输出力矩通过侧传动驱动主动轮旋转,再由主动轮带动履带板卷绕运动・52・ 第3期赵玉慧等:基于Matlab与Recur Dyn的电传动履带车辆的联合仿真的,因此,只要在主动轮上加力矩或运动学驱动方式后,即可对所建模型进行仿真1212 路面模型路面谱文件的建立是采用三角形平面缝合来确定路面形状的,每个三角形单元由三个节点组成1任何形式的路面模型均可通过改变三个节点的位置来建立1地面参数在履带系统中定义,每个履带系统可以有其自己的路面和路面参数1本文采用坡度为10°的重粘土路面,路面参数如图3所示,其中剪切变形系数为:01025,路面模型见图41图3 路面参数图4 路面模型3 联合仿真模型结合当前履带车辆仿真研究的状况和军队通用规范的要求,仿真前做以下假设条件:车辆的质心和车辆的几何中心重合;负重轮与履带认为是点接触,履带接地压力被认为是沿履带中心线集中分布;不考虑履带与地面的滑转和滑移现象1利用Recur Dyn /contr ol 接口技术将整车行动部分多体系统动力学模型和基于Matlab /Si m ulink 建立的电机控制系统模型结合起来,进行机械系统和控制系统联合仿真[2],实现控制系统负载的动态加载1如图5所示,给定电机角速度指令值400rad /s ,电传动控制系统的输出转速为ω1,ω2.ω1,ω2作为履带车辆动力学系统的输入量,其输出量为负载力矩T 1,T 2,而T 1,T2则为电传动控制系统中永磁同步电动机的负载输入,由此形成一个闭环控制系统1图5 电驱动控制系统模型与履带车辆模型的联合仿真 在建立联合仿真模型之前,首先要运行履带车辆的Recur Dyn 动力学模型,以确保该模型正确1联合仿真的具体步骤如下:①在Recur Dyn /contr ol 中定义履带车辆动力学模型的输入量ω1,ω2和输出量T 1,T 2,以及连接Recur Dyn 和Matlab 的tank 1m 文件1其中:ω1=P I N (ω1),ω2=P I N (ω2),T 1=TZ (Sprocketl .M ar Ker 1,M other 2body ..M ar Ker 18),T 2=TZ (Sprocketl .M ar Ker 2,M other 2・62・车辆与动力技术2007年 body ..M ar Ker 18);②关闭RecurDyn 软件,打开Matlab /Si m u 2link ,连接已经建立的电传动控制系统模型及履带车辆动力学系统模型;③设置联合仿真参数,运行Matlab /Si m ulink,则系统自动打开Recur Dyn 软件,并调用Recur Dyn 求解器进行整个机械系统的联合仿真计算14 仿真举例及结论①根据履带车辆直线行驶动力学理论,利用牛顿第二定律微分方程分析车辆运动状态与外力关系1不计空气动力阻力,建立行驶方程式[3]:P -fG cosα-G sin α=Gx ¨/g .(4)其中 P 为牵引力;f 为摩擦系数;G 为车重;α为行驶道路的坡角1电动机负载力矩为:T m =G (f co s α+sin α)・r z /2i η.(5)其中 r z 为主动轮半径;i 为总传动比;η为电动机效率1由式(5)计算得某型履带车辆在良好水泥路面上行驶的负载力矩为103N ・m ,在10°坡面上匀速行使时负载力矩为225N ・m 1基于Recur Dyn 的动力学仿真结果如图6所示1车辆起步时,负载力矩大约为100N ・m;车辆稳定行驶时负载力矩约为97N ・m ;t =14s 时车辆爬坡,负载力矩增大,其峰值约为760N ・m ;t =17s 后,车辆完全行使于坡面,负载力矩趋于稳定,其值约为210N ・m 1由此可知,采用Recur 2Dyn 动力学分析软件仿真结果与根据车辆行驶动力学模型理论计算得到的结果一致1图6 电动机负载力矩波形图②基于Matalb 的驱动系统仿真结果如图7所示10<t <3s 时,永磁同步电机恒力矩运行,力矩值约为490N ・m ,电机转速增大;0<t <14s 时,电机弱磁运行于“恒功率区”;t =14s 电机转速达到390rad /s ,电机力矩约为95N ・m ,此时车辆开始爬坡,转速下降、力矩增大;t =17s 后,电动机转速约为320rad /s ,车辆匀速行使于坡面上,力矩值约为210N ・m 1定子电流分量i d 和i q 运行轨迹如图8所示,符合最大力矩/电流运行和弱磁运行规律1图7 电机转速及力矩波形图图8 i d 、i q 波形图综上所述,本文分别建立了基于Matlab 的履带车辆控制系统模型和基于Recur Dyn 的履带车辆动力学系统模型,采用联合仿真的方法,实现了系统负载的动态加载,大大提高了求解精确度,为履带车辆电传动系统仿真提供了新的手段,为虚拟样机设计和制定精确的整车控制策略提供有效的技术支持1参考文献:[1] 臧克茂,马晓军.装甲车辆电力传动系统及其设计[M ].北京:国防工业出版社,2004.[2] 孙逢春,陈树勇.电传动履带车辆驱动系统建模与仿真研究[M ].北京:北京理工大学出版社,2006.[3] 王德胜,杨建华.装甲车辆行驶原理[M ].北京:装甲兵工程学院,1989.・72・ 第3期赵玉慧等:基于Matlab 与Recur Dyn 的电传动履带车辆的联合仿真。
履带拖拉机软土地行走动力学仿真

履带拖拉机软土地行走动力学仿真徐飞军;黄文倩;陈立平【摘要】采用多体动力学仿真软件RecurDyn的履带车辆子系统Track(LM)建立履带拖拉机多体动力学模型,并进行仿真分析,着重对履带拖拉机在粘土和重粘土两种软性路面运行过程中履带板间及支重轮受力情况进行比较分析,提出了延长履带寿命的措施,为履带拖拉机的研制和使用提供参考.【期刊名称】《农机化研究》【年(卷),期】2009(031)012【总页数】4页(P204-207)【关键词】履带拖拉机;子系统;地面力学;动力学仿真【作者】徐飞军;黄文倩;陈立平【作者单位】国家农业信息化工程技术研究中心,北京,100097;国家农业信息化工程技术研究中心,北京,100097;国家农业信息化工程技术研究中心,北京,100097【正文语种】中文【中图分类】S219.2;S1260 引言在低洼易涝地区,大部分农田作业时期土壤含水率较高,轮式拖拉机或不能下地或作业时形成较深的轮辙,对土壤结构破坏严重[1]。
履带拖拉机对土壤的单位面积压力小,对土壤的附着性能好,适合于在松软的地面条件下进行农田作业,在农业生产过程中起着重要作用[2]。
由于履带车辆自身以及使用环境的复杂性,传统的研究模式导致研制费用高、周期长。
地面力学以及多体动力学的发展和完善为履带车辆的建模仿真提供了理论与技术支持[3],但软土地与履带之间相互作用复杂,建模困难。
以往研究履带车辆都假设在刚性路面上行走,如吉林大学的王水林对挖掘机履带行走装置在硬地面上进行了动力学分析[4]。
文献[5]和文献[6]都对滑转滑移条件下履带车辆在坚实路面上的转向过程进行了仿真和分析,而对履带车辆与软土接触情况的研究较少;文献[7]利用计算机仿真技术,就履带预张紧力对车辆软土通过性能的影响规律进行研究;文献[8]分析了履带预张紧力对高速履带车辆的平顺性的影响,但都没有涉及不同土壤特性条件下履带板和支重轮的受力分析。
目前,用于履带车辆动力学仿真的软件主要有ADAMS和RecurDyn两种。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要 :采用多体动力学仿真软件 RecurDyn 的履带车辆子系统 Track ( HM) ,建立某型履带车辆多体动力学模型 ,对履带车 辆在硬 、软两种地面的高速转向过程进行动力学仿真和对比分析 ,着重讨论履带车辆在软地面高速转向的动力学特性 ,为 履带车辆转向性能的研究与高速转向的正确操作提供指导 。 关键词 :履带车辆 地面力学 转向 动力学仿真
Dynamic Simulation of Tracked Vehicle Turning at High Speed Based on RecurDyn
L U Jinjun , WEI Laisheng , ZHAO Taoshuo
Abstract : A 3D dynamical model of a certain t racked vehicle is created based on t he multi2body dynamic software RecurDyn/ Track ( HM) . The simulations of t he t racked vehicle t urning on hard and soft terrain are implemented respectively ,and t he re2 sult s are analyzed and compared. The steering p roperties of t racked vehicle t urning on soft terrain at a high speed are emp ha2 sized. The simulation result s can p rovide some t heoretical guidance fo r st udying t he steering characteristics of t racked vehicles at a high speed.
·12 ·
一直较大 ,车辆在软地转向 比在硬地转向困难 。从图 6 的仿真结果来看 ,车辆在软 地转向时车辆俯仰的响应 都比硬地转向大得多 ,而且 变化非常不均匀 ,显然软地 转向比硬地转向车辆的侧 向稳定性要差 ,极限情况则 会发生车辆的侧翻 ,在沙地转向时脱带时有发生 ,我们不 时调整张紧装置才使仿真继续进行 。从图 6 可以看出 ,车 辆在整个转向过程中车体的俯仰变化是很复杂的 ,特别是 软地转向时这种变化更加明显 ,可见履带车辆转向时内侧 履带系统的制动和地面特性都对车体的姿态有较大的影 响 。从图 7 和 8 可以看出 ,车辆软地转向时履带张紧力的 变化比硬地转向时复杂 ,特别是内侧 (制动侧) 履带的张紧 力有非常明显的波动 ,说明软地转向时履带环的稳定性较 差 ,严重时会发生履带脱轮从而使车辆丧失行驶能力 。
由于地面性质的特殊性 ,以往研究都假设履带车辆在 刚体路面上转向 ,而对履带车辆在软地面上的高速转向的 研究却很少 。履带车辆一般在越野条件下行驶 。近年来随 着地面力学以及多体动力学的发展和完善 ,为解决履带车 辆自身复杂性的问题提供了理论与技术支持 。动力学分 析软件 RecurDyn 中含有履带车辆子系统 Track ( HM) , 可以实现履带系统全三维建模 ,分析不同类型的履带系 统 、全动态的履带模型以及与软 、硬土壤的相互作用 ,是进 行履带车辆复杂动力学系统分析的有力工具 ,有助于深入
τ= ( c + ptan <) (1 - e ) - sj/ k
(6)
在软路面上 ,履带板与地面之间的压力是通过另一种
接触力 ( Soft Ground2Grouser Shoepad) 来实现的 。本文软 性地面选择的是某沙地路面 ,参数如图 3 所示 。
2 仿真算例
在车辆的操纵稳定性研究中 ,开环系统的时域响应客 观性和再现性更好 ,所以应用更加广泛 。履带车辆的滑移 转向是通过一侧履带推力增加 ,另一侧履带推力减小而产 生一个转向力矩来克服由于履带在地面上滑移和由车辆 转动惯性形成的转向阻力矩来实现的[12] 。履带车辆高速 转向时 ,由于离心力及地面特性的影响 ,使得车辆转向的 动力学响应变得非常复杂 。
义的 ,即履带车辆与地面之间的相互作用产生接触力 。
RecurDyn 中接触碰撞力的计算公式为 :
F=
-
k( q -
q0 ) n -
·
cq
(1)
其中 q - q0 为沉陷量 ; 根据有关理论和试验证明 , 指
数 n 为 2~3 所得出的仿真收敛和速度最佳 ;同时公式 (1)
中的刚度 k 和阻尼 c 对仿真结果也有较大的影响 ,履带与
τ=τmax (1 - e ) - sj/ k
(4)
式中 , S j 为剪切位移 ; k 是水平剪切变形模数 ;τmax 最大剪
应力 ,且有 :
τmax = c + ptan <
(5)
式中 , p 为地面压力 ; c 是地面压力为零时的最大剪切应
力 ; <土壤内摩擦角 。
将式 (5) 代入式 (4) 得 :
·10 · 文章编号 :1002 - 6886 (2008) 06 - 0010 - 03
现代机械 2008 年第 1 期
基于 RecurDyn 的履带车辆高速转向动力学仿真研究 3
卢进军1 ,魏来生1 ,赵韬硕2
(1. 中国北方车辆研究所 车辆传动国家重点实验室 , 北京 100072 ;2. 中国北方车辆研究所 , 北京 100072 )
1) 履带车辆在平坦硬地工况的转向 ,地面参数如图 2 所示 。给模型主动轮轴施加 Motion ,使左右驱动力起步加 速到 33 rad/ s ,对应车速为 23 km/ h ; 右侧驱动轮转速从 1 s到 1. 5 s 内转速降低到 11 rad/ s (履带速度降为 7. 66 km/ h) ,左侧驱动轮保持不变 。车辆相应的初速度设为 0 , 起步后迅速升至 23 km/ h ,仿真时间为 10 s 。
地面之间的摩擦力由库仑摩擦定律计算得到 。本文仿真
所用硬地路面参数如图 2 所示 。
软性地面模型认为土壤具有“记忆”功能 , 即考虑加载 历史[10] ;每一履带板与地面之间都有一广义力 , 并由一用 户子程序完成该广义力的计算 。其中 z 方向力表示履带
板与地面之间的垂向力 ,另外两个水平方向的力表示履带 板与路面之间的剪切 ( 摩擦) 力 。履带车辆对地面的正压
2) 履带车辆在平坦软地工况的转向 ,地面参数如图 3 所示 。驱动轮转速和车辆初速度设置同仿真 1) 。
两种转向工况的仿真结果包括 : 车辆两侧驱动轮转 速 ,车辆转向过程中车体的横摆角速度 ,俯仰角的变化 ,两 侧履带系统张紧装置张紧力的变化 。如图 4 至 8 所示 。
从图 5 可以看出 ,履带车辆硬地转向时车体横摆角速 度较快达到稳定 ,而软地转向时车体横摆角速度响应波动
3 基金项目 :坦克传动国家重点实验室项目资金 (编号 9140C3401010601) 。 作者简介 :卢进军 (1980 —) ,男 ,河北人 ,中国北方车辆研究所研究生 。
魏来生 (1959 —) ,男 ,陕西人 ,中国北方车辆研究所研究员级高级工程师 。 赵韬硕 (1978 —) ,男 ,汉族 , 北京人 ,硕士研究生 ,北方车辆研究所工程师 。 收稿日期 :2007 - 6 - 20
个子系统来建造履带式车辆模型 。车体是建立履带车辆 模型的基本实体 ,所有车轮和履带组成履带子系统 ,每个 履带系统可以独立设置自己的路面和路面参数 。通过定 义驱动轮的旋转速度或转矩来实现车辆的运动 。托带轮 以一个转动副与车体相连 。负重轮与车体之间配置悬挂 装置 。诱导轮通过张紧装置连到车体上以保持履带的张 紧力 。该履带车每侧履带系统有 5 个负重轮 、3 个托带轮 、 96 块履带板 ,驱动轮前置 ,履带的着地长 l = 3. 36 m , 履 带中心距 B = 2. 06 m ,履带板宽度 b 为 0. 23 m 。
3 结 论
本文采用多体动力学仿真软件 RecurDyn 中的履带 车辆子系统 Track ( HM) ,建立履带车辆三维多体动力学 模型 ,对履带车辆在硬 、软两种地面的高速转向过程进行 动力学仿真分析 ,并将两种转向工况的仿真结果作对比分 析 。分析结果表明 ,履带车辆软地转向的动力学响应比硬 地转向时复杂 ,在某些情况下容易发生履带脱轮甚至车辆 的侧翻等危险情况 。仿真结果为履带车辆的结构设计以 及高速转向性能的评价提供参考指导 ,同时展现了 Recur2 Dyn 能够对履带车辆作全方位 、高效率的仿真分析能力 , 是履带车辆概念设计与研发阶段进行车辆性能预测的理 想工具 。
研究履带车辆性能 、降低研究成本 、缩短研制周期 。
1 系统模型的建立
应用多体动力学仿真分析软件 RecurDyn 自带的履 带车辆子系统 Track ( HM) ,建立含两条履带系统的履带 车辆三维多体动力学模型 ,如图 1 所示 。
1. 1 车辆模型 RecurDyn 通过建立车体 、地面和各类车轮及履带各
现代机械 2008 年第 1 期
参考文献
1 毕小平 ,王普凯 1 坦克动力 - 传动装置性能匹配与优化 [ M ]1 北 京 :国防工业出版社 ,2004
2 毕小平 ,王普凯 ,李海军等1 履带车辆动态转向过程的仿真模型[J ] 1 兵工学报 ,2003 ,24 (4) :5512554
3 史力晨 ,王良曦 ,张兵志等 1 履带车辆在坚实地面转向瞬态过程模 拟计算[J ]1 车辆与动力技术 ,2003 ,1 :27233
Key words :t racked vehicle ; terramechanics ; t urning ; dynamic simulatio n
0 引言
转向能力是车辆改变运动方向的一种性能[1] 。转向 的灵活性和可控性是反映军用履带车辆机动能力的重要 战技指标之一 ,研究其性能对于车辆的合理设计和正确使 用具有重要意义[2 ,3] 。J . Y Wo ng 等[4] 基于车辆与地面的 滑动摩擦理论对履带车辆在硬地面上的稳定转向原理作 了较深入的研究 。Anh Tuan Le 等[5] 分析了履带车辆在 软地上低速稳定转向的特性 。国内对履带车辆转向的研 究也有很大进展 ,文献 [ 6 ,7 ] 在履带车辆简化模型的基础 上建立了考虑履带滑转滑移条件的滑动模型 ,并分别对履 带车 辆 在低 、高速 下 的 稳 定转 向 过 程 作了 分 析 。文 献 [ 3 ,8 ]对履带车辆在坚实地面的瞬态转向过程进行了研 究。