ABB机器人~编程基本指令之运动指令
ABB机器人常用指令详解-中文

ABB常用指令详解-中文ABB常用指令详解-中文一、简介及背景ABB是一种先进的自动化设备,具有广泛的应用领域。
本文档将详细介绍ABB常用指令,帮助用户快速了解和掌握的操作技巧和功能。
二、基础指令1.MOVE指令:用于控制的移动,包括直线和旋转方向的移动。
2.SPEED指令:设置的运动速度。
3.HOME指令:将恢复到初始位置。
4.STOP指令:停止的运动。
5.PAUSE指令:暂停的运动,可以手动恢复。
6.WT指令:等待指定条件满足后再继续执行下一步指令。
三、高级指令1.ROBOT指令:控制的工作模式,包括自动模式和示教模式。
2.PROGRAM指令:创建、编辑和运行的程序。
3.CALL指令:调用其他程序或子程序。
4.IF指令:根据条件执行不同的操作。
5.FOR指令:循环执行一系列指令。
6.WHILE指令:在条件满足的情况下重复执行一系列指令。
四、IO指令1.SET指令:设置的输入输出状态。
2.READ指令:读取的输入输出状态。
3.WTIO指令:等待的输入输出状态满足指定条件后再继续执行。
五、系统指令1.DATE指令:获取或设置的日期。
2.TIME指令:获取或设置的时间。
3.ERROR指令:获取或清除的错误信息。
4.POSITION指令:获取当前的位置信息。
5.TOOL指令:设置或校准的工具。
6.SPEEDLIMIT指令:设置的速度限制。
六、附件本文档涉及附件如下:1.附件1:ABB常用指令示例程序2.附件2:ABB常用指令使用手册七、法律名词及注释1.:指能够自动执行任务的可编程设备。
2.指令:语句或命令,用于控制的操作。
3.输入输出(IO):用于与外部设备之间的数据传输和通信。
4.程序:包含一系列指令的有序集合。
5.条件:一种逻辑判断,用于根据不同的情况执行不同的操作。
6.工具:所用的工作设备。
ABB机器人~编程基本指令之运动指令

一运动指令MoveJMoveJ[\Conc,]ToPoint,Speed[\V]│[\T],Zone[\Z][\Inpos],Tool[\WObj];1 [\Conc,]:协作运动开关。
(switch)2 ToPoint:目标点,默认为*。
(robotarget)3 Speed:运行速度数据。
(speeddata)4 [\V]:特殊运行速度mm/s。
(num)5 [\T]:运行时间控制s。
(num)6 Zone:运行转角数据。
(zonedata)7 [\Z]:特殊运行转角mm。
(num)8 [\Inpos]:运行停止点数据。
(stoppointdata)9 Tool:工具中心点(TCP)。
(tooldata)10 [\WObj]:工件坐标系。
(wobjdata)11 应用机器人以最快捷的方式运动至目标点,机器人运动状态不完全可控,但运动路径保持唯一,常用于机器人在空间大范围移动。
12 实例MoveJ p1,v2000,fine,grip1;MoveJ \Conc,p1,v2000,fine,grip1;MoveJ p1,v2000\V:=2200,z40\Z:=45,grip1;MoveJ p1,v2000,z40,grip1\WObj:=wobjTable;MoveJ p1,v2000,fine\Inpos:=inpos50,grip1;二运动指令MoveLMoveL[\Conc,]ToPoint,Speed[\V]│[\T],Zone[\Z][\Inpos],Tool[\WObj][\Corr];1 [\Conc,]:协作运动开关。
(switch)2 ToPoint:目标点,默认为*。
(robotarget)3 Speed:运行速度数据。
(speeddata)4 [\V]:特殊运行速度mm/s。
(num)5 [\T]:运行时间控制s。
(num)6 Zone:运行转角数据。
(zonedata)7 [\Z]:特殊运行转角mm。
ABB机器人部分常用简单指令【免费下载】

一、ABB机器人指令:1、基本运动指令:MoveL:线性运动(Linear)MoveJ:关节轴运动 (Joint)MoveC :圆周运动(Circular)p1:目标位置。
(robtarget)v100:运行速度mm/s。
(speeddata)z10:转弯区尺寸mm。
(zonedata)tool1:工具中心点TCP。
(tooldata)(1)速度选择:mm/s·将光标移至速度数据处,按回车键,进入选择窗口,选择所需速度。
·机器人运行速度属于数据类型speeddata。
·常用运行速度在base模块中已经定义。
·特殊速度可自行定义。
·max速度为v5000,base模块中定义*大速度为v7000,*大速度机器人未必能达到。
(2)转弯区尺寸选择:mm·将光标移至转弯区尺寸数据处,按回车键,进入选择窗口,选择所需转弯区尺寸。
·机器人转弯区尺寸属于数据类型zonedata。
·常用转弯区尺寸在base模块中已经定义。
·特殊转弯区尺寸可自行定义。
·fine指机器人TCP达到目标点,并在目标点速度降为零,连续运行时,机器人动作有停顿。
·zone指机器人TCP不达到目标点,连续运行时,机器人动作圆滑、流畅。
·base模块中已经定义的转弯区尺寸*小为z1,*大为z200。
·尽量使用较大的转弯区尺寸。
(3)参变量:光标指在当前指令时,按功能键OptArg,可选择参变量。
·[Conc](switch)协作运动。
机器人未移动至目标点,已经开始执行下一个指令。
·[ToPoint](robtarget)在采用新指令时,目标点自动生成*。
·[V](num)定义速度mm/s。
·[T](num)定义时间s。
通过时间决定速度。
·[Z](num)定义转弯区尺寸mm。
第八部分:ABB机器人运动控制常用指令
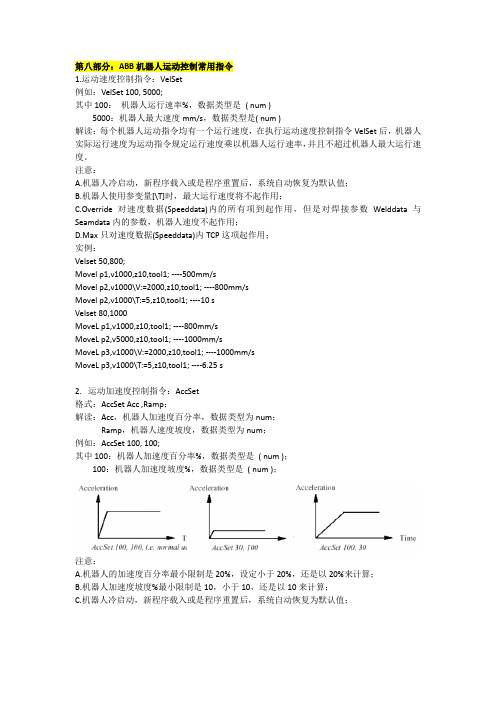
第八部分:ABB机器人运动控制常用指令1.运动速度控制指令:VelSet例如:VelSet 100, 5000;其中100:机器人运行速率%,数据类型是( num )5000:机器人最大速度mm/s,数据类型是( num )解读:每个机器人运动指令均有一个运行速度,在执行运动速度控制指令VelSet后,机器人实际运行速度为运动指令规定运行速度乘以机器人运行速率,并且不超过机器人最大运行速度。
注意:A.机器人冷启动,新程序载入或是程序重置后,系统自动恢复为默认值;B.机器人使用参变量[\T]时,最大运行速度将不起作用;C.Override对速度数据(Speeddata)内的所有项到起作用,但是对焊接参数Welddata与Seamdata内的参数,机器人速度不起作用;D.Max只对速度数据(Speeddata)内TCP这项起作用;实例:Velset 50,800;Movel p1,v1000,z10,tool1; ----500mm/sMovel p2,v1000\V:=2000,z10,tool1; ----800mm/sMovel p2,v1000\T:=5,z10,tool1; ----10 sVelset 80,1000MoveL p1,v1000,z10,tool1; ----800mm/sMoveL p2,v5000,z10,tool1; ----1000mm/sMoveL p3,v1000\V:=2000,z10,tool1; ----1000mm/sMoveL p3,v1000\T:=5,z10,tool1; ----6.25 s2.运动加速度控制指令:AccSet格式:AccSet Acc ,Ramp;解读:Acc,机器人加速度百分率,数据类型为num;Ramp,机器人速度坡度,数据类型为num;例如:AccSet 100, 100;其中100:机器人加速度百分率%,数据类型是( num );100:机器人加速度坡度%,数据类型是( num );注意:A.机器人的加速度百分率最小限制是20%,设定小于20%,还是以20%来计算;B.机器人加速度坡度%最小限制是10,小于10,还是以10来计算;C.机器人冷启动,新程序载入或是程序重置后,系统自动恢复为默认值;。
ABB机器人~编程基本指令之运动指令
2Speed:运行速度数据。(speeddata)
3[\T]:运行时间控制s。(num)
4Zone:运行转角数据。(zonedata)
5Tool:工具中心点(TCP)。(tooldata)
6[\WObj]:工件坐标系。(wobjdata)
7Proc:例行程序名称。(string)
13 实例
MoveAbsJ p1,v2000,fine,grip1;
MoveAbsJ\Conc,p1\NoEOffs,v2000,fine,grip1;
MoveAbsJ p1,v2000\V:=2200,z40\z:=45,grip1;
MoveAbsJ p1,v2000,z40,grip1\WObj:=wobj1;
4[\T]:运行时间控制s。(num)
5Zone:运行转角数据。(zonedata)
6Tool:工具中心点(TCP)。(tooldata)
7[\WObj]:工件坐标系。(wobjdata)
8Proc:例行程序名称。(string)
9 应用
机器人通过中间点以圆弧移动方式运动至目标点,并且在目标点调用相应例行程序,在指令MoveC基础上增加例行程序调用功能。
4 [\T]:运行时间控制s。(num)
5 Zone:运行转角数据。(zonedata)
6 Tool:工具中心点(TCP)。(tooldata)
7 [\Wobj]:工件坐标系。(wobjdata)
8 Signal:数字输出信号名称。(signaldo)
9 Value:数字输出信号值。(dionum)
五 运动指令 MoveJDO
MoveLDO ToPoint,Speed[\T],Zone,Tool[\WObj],Signal,Value;
ABB机器人实际应用总结归纳中的指令说明

ABB机器人实际应用总结归纳中的指令说明(一)ABB机器人指令
1、JOINT指令:Joint指令是ABB机器人操作中最基本的指令,它用
来控制ABB机器人的运动。
Joint指令不仅要求用户指定机器人的力矩,
还要求用户指定机器人的关节转动角度以及机器人到达目标位置的时间。
2、POS指令:Pos指令用来控制ABB机器人在空间位置上的运动,以
及机器人的末端位置。
Pos指令要求用户指定机器人到达目标位置的速度,机器人的最大运动速度,机器人的到达目标位置的最短时间。
3、LINE指令:Line指令用来控制ABB机器人沿一条直线路径的运动。
Line指令要求用户指定机器人运动的起点和终点,以及机器人的最大运
动速度和到达目标位置的最短时间。
4、CYCLE指令:Cycle指令用来控制ABB机器人同一条轨迹多次运动
的指令,可以设置循环次数,指定循环运动的参数,如运动速度,运动的
起始点和终点,以及机器人的到达目标位置的最短时间。
5、WAIT指令:Wait指令用来控制ABB机器人暂停一段时间,在
Wait指令中,用户可以指定暂停时间的长短,也可以指定机器人在暂停
时间内运动的参数,如运动速度等。
6、IF指令:If指令用来控制ABB机器人在满足特定条件时执行特定
操作。
ABB机器人常用指令详解-中文(一)
ABB常用指令详解-中文(一)ABB常用指令详解-中文(一)1、介绍本文档详细介绍了ABB常用指令的使用方法和注意事项。
通过学习本文档,您将能够熟练使用ABB进行各种操作和编程。
2、指令列表2.1 运动指令2.1.1 MOVJ指令:用于指定关节间的跳跃式运动。
2.1.2 MOVL指令:用于指定关节间的连续式运动。
2.1.3 MOVC指令:用于指定末端执行器的圆弧路径运动。
2.1.4 MOVPT指令:用于指定末端执行器的直线和圆弧路径运动。
2.1.5 BACKUP指令:用于将退回到指定位置。
2.1.6 UPDATE指令:用于更新当前位置。
2.2 条件指令2.2.1 IF指令:用于根据某一条件执行不同的指令。
2.2.2 WHILE指令:用于在某一条件满足时重复执行一段指令。
2.2.3 WT指令:用于等待条件满足后再继续执行下一条指令。
2.3 数学指令2.3.1 ADD指令:用于将两个数相加。
2.3.2 SUB指令:用于将两个数相减。
2.3.3 MUL指令:用于将两个数相乘。
2.3.4 DIV指令:用于将两个数相除。
3、指令使用示例3.1 MOVJ指令使用示例3.1.1 指令格式:MOVJjoint_1_pos,joint_2_pos,joint_3_pos,joint_4_pos,joint_5_pos ,joint_6_pos3.1.2 示例:MOVJ 0,0,90,0,0,03.2 MOVL指令使用示例3.2.1 指令格式:MOVL x_pos,y_pos,z_pos,rz,ry,rz3.2.2 示例:MOVL 100,200,300,0,0,04、注意事项4.1 安全操作注意事项4.1.1 在操作时,请确保周围没有其他人员,以免发生意外伤害。
4.1.2 在进行编程前,请确保电源已关闭,并进行必要的安全检查。
4.2 指令使用注意事项4.2.1 在使用任何运动指令前,请确保当前位置与设定位置相符,避免发生运动错误。
ABB机器人常用指令详解-中文(一)
ABB常用指令详解-中文(一)ABB常用指令详解-中文(一)本文档旨在介绍ABB常用指令的详细信息,以帮助用户更好地了解和使用ABB系统。
下面将对各个章节进行详细阐述。
1.运动控制指令1.1.MOVEJ指令MOVEJ指令用于将关节直线移动到目标位置。
可以通过设置目标位置、运动速度和加速度来实现精确的运动控制。
该指令的语法如下:MOVEJ {目标位置},v{速度},a{加速度}其中,目标位置可以用关节角度或者工具坐标系位置进行表示。
1.2.MOVEL指令MOVEL指令用于将工具坐标系下的TCP(工具中心点)位置沿直线移动到目标位置。
通过设置目标位置、运动速度和加速度参数,可以实现精确的运动控制。
该指令的语法如下:MOVEL {目标位置},v{速度},a{加速度}其中,目标位置可以用工具坐标系下的坐标进行表示。
1.3.MOVEC指令MOVEC指令用于沿一条圆弧轨迹将点A移动到点B。
可通过设置起始点和终点的TCP位置,沿圆弧轨迹实现精确的运动控制。
该指令的语法如下:MOVEC {起始点TCP位置},{终点TCP位置},v{速度},a{加速度}2.系统控制指令2.1.SPEED指令SPEED指令用于设置运动的速度和加速度参数。
可以通过设置关节速度、坐标系速度和时间倍率三个参数来控制的运动速度。
该指令语法如下:SPEED v{速度},a{加速度},t{时间倍率}2.2.SETDO指令SETDO指令用于设置数字输出口的状态。
可以通过该指令将数字输出口的状态设置为高(1)或低(0)。
该指令的语法如下:SETDO x{数字输出口号},{状态}2.3.SETTOOL指令SETTOOL指令用于设置工具坐标系。
可以通过该指令将工具坐标系的原点和方向设置为指定的TCP位置。
该指令的语法如下:SETTOOL p{x},{y},{z},{q0},{q1},{q2},{q3}3.数据处理指令3.1.WT指令WT指令用于暂停程序的执行,直到满足指定的条件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MoveJ[\Conc,]ToPoint,Speed[\V]│[\T],Zone[\Z][\Inpos],Tool[\WObj];1 [\Conc,]:协作运动开关。
(switch)2 ToPoint:目标点,默认为*。
(robotarget)3 Speed:运行速度数据。
(speeddata)4 [\V]:特殊运行速度mm/s。
(num)5 [\T]:运行时间控制s。
(num)6 Zone:运行转角数据。
(zonedata)7 [\Z]:特殊运行转角mm。
(num)8 [\Inpos]:运行停止点数据。
(stoppointdata)9 Tool:工具中心点(TCP)。
(tooldata)10 [\WObj]:工件坐标系。
(wobjdata)11 应用机器人以最快捷的方式运动至目标点,机器人运动状态不完全可控,但运动路径保持唯一,常用于机器人在空间大范围移动。
12 实例MoveJ p1,v2000,fine,grip1;MoveJ \Conc,p1,v2000,fine,grip1;MoveJ p1,v2000\V:=2200,z40\Z:=45,grip1;MoveJ p1,v2000,z40,grip1\WObj:=wobjTable;MoveJ p1,v2000,fine\Inpos:=inpos50,grip1;MoveL[\Conc,]ToPoint,Speed[\V]│[\T],Zone[\Z][\Inpos],Tool[\WObj][\Corr];1 [\Conc,]:协作运动开关。
(switch)2 ToPoint:目标点,默认为*。
(robotarget)3 Speed:运行速度数据。
(speeddata)4 [\V]:特殊运行速度mm/s。
(num)5 [\T]:运行时间控制s。
(num)6 Zone:运行转角数据。
(zonedata)7 [\Z]:特殊运行转角mm。
(num)8 [\Inpos]:运行停止点数据。
(stoppointdata)9 Tool:工具中心点(TCP)。
(tooldata)10 [\WObj]:工件坐标系。
(wobjdata)11[\Corr]:修正目标点开关。
(switch)12 应用机器人以线性移动过方式运动至目标点,当前点与目标点二点决定一条直线,机器人运动状态可控,运动路径保持唯一,可能出现死点,常用于机器人在工作状态移动。
13 实例MoveL p1,v2000,fine,grip1;MoveL \Conc,p1,v2000,fine,grip1;MoveL p1,v2000\V:=2200,z40\Z:=45,grip1;MoveL p1,v2000,z40,grip1\WObj:=wobjTable;MoveL p1,v2000,fine\Inpos:=inpos50,grip1;MoveL p1,v2000,fine,grip1\Corr;三运动指令MoveCMoveC[\Conc,]CirPoint,ToPoint,Speed[\V]│[\T],Zone[\Z][\Inpos],Tool[\WObj][\Corr];1 [\Conc,]:协作运动开关。
(switch)2CirPoint:中间点,默认为*。
(robotarget)3 ToPoint:目标点,默认为*。
(robotarget)4 Speed:运行速度数据。
(speeddata)5 [\V]:特殊运行速度mm/s。
(num)6 [\T]:运行时间控制s。
(num)7 Zone:运行转角数据。
(zonedata)8 [\Z]:特殊运行转角mm。
(num)9[\Inpos]:运行停止点数据。
(stoppointdata)10Tool:工具中心点(TCP)。
(tooldata)11[\WObj]:工件坐标系。
(wobjdata)12[\Corr]:修正目标点开关。
(switch)13 应用机器人通过中间点以圆弧移动方式运动至目标点,当前点、中间点与目标点三点决定一段圆弧,机器人运动状态可控,运动路径保持唯一,常用于机器人在工作状态移动。
14实例MoveC p1,p2,v2000,fine,grip1;MoveC \Conc,p1,p2,v200\V:=500,z1\z:=5,grip1;MoveC p1,p2,v2000,z40,grip1\WObj:=wobjTable;MoveC p1,p2,v2000,fine\Inpos:=inpos50,grip1;MoveC p1,p2,v2000,fine,grip1\Corr;15 限制不可能通过一个MoveC指令完成一个圆。
MoveL p1,v500,fine,tool1;MoveC p2,p3,v500,z20,tool1;MoveC p4,p1,v500,fine,tool1;四运动指令MoveJDOMoveJDO ToPoint,Speed[\T],Zone,Tool[\WObj],Signal,Value;1 ToPoint:目标点,默认为*。
(robotarget)2 Speed:运行速度数据。
(speeddata)3 [\T]:运行时间控制s。
(num)4 Zone:运行转角数据。
(zonedata)5 Tool:工具中心点(TCP)。
(tooldata)6 [\Wobj]:工件坐标系。
(wobjdata)7 Signal:数字输出信号名称。
(signaldo)8 Value:数字输出信号值。
(dionum)9 应用机器人以最快捷的方式运动至目标点,并且在目标点将相应输出信号设置为相应值,在指令MoveJ基础上增加信号输出功能。
五运动指令MoveJDOMoveLDO ToPoint,Speed[\T],Zone,Tool[\WObj],Signal,Value;1 ToPoint:目标点,默认为*。
(robotarget)2 Speed:运行速度数据。
(speeddata)3 [\T]:运行时间控制s。
(num)4 Zone:运行转角数据。
(zonedata)5 Tool:工具中心点(TCP)。
(tooldata)6 [\Wobj]:工件坐标系。
(wobjdata)7 Signal:数字输出信号名称。
(signaldo)8 Value:数字输出信号值。
(dionum)9 应用机器人以线性运动的方式运动至目标点,并且在目标点将相应输出信号设置为相应值,在指令MoveL基础上增加信号输出功能。
六运动指令MoveCDOMoveCDO CirPoint,ToPoint,Speed[\T],Zone,Tool[\WObj],Signal,Value;1 CirPoint:中间点,默认为*。
(robotarget)2 ToPoint:目标点,默认为*。
(robotarget)3 Speed:运行速度数据。
(speeddata)4 [\T]:运行时间控制s。
(num)5 Zone:运行转角数据。
(zonedata)6 Tool:工具中心点(TCP)。
(tooldata)7 [\Wobj]:工件坐标系。
(wobjdata)8 Signal:数字输出信号名称。
(signaldo)9 Value:数字输出信号值。
(dionum)10 应用机器人通过中间点以圆弧移动方式运动至目标点,并且在目标点将相应输出信号设置为相应值,在指令MoveC基础上增加信号输出功能。
七运动指令MoveJSyncMoveJSync ToPoint,Speed[\T],Zone,Tool[\WObj],Proc;1ToPoint:目标点,默认为*。
(robotarget)2Speed:运行速度数据。
(speeddata)3[\T]:运行时间控制s。
(num)4Zone:运行转角数据。
(zonedata)5Tool:工具中心点(TCP)。
(tooldata)6[\WObj]:工件坐标系。
(wobjdata)7Proc:例行程序名称。
(string)8 应用机器人以最快捷的方式运动至目标点,并且在目标点调用相应例行程序,在指令MoveJ基础上增加例行程序调用功能。
9限制①用指令Stop停止当前指令运行,会出现一个错误信息,如需避免,采用指令StopInstr。
②不能使用指令MoveJSync来调用中断处理程序TRAP。
③不能单步执行指令MoveJSync所调用的例行程序PROC。
八运动指令MoveLSyncMoveLSync ToPoint,Speed[\T],Zone,Tool[\WObj],Proc;1ToPoint:目标点,默认为*。
(robotarget)2Speed:运行速度数据。
(speeddata)3[\T]:运行时间控制s。
(num)4Zone:运行转角数据。
(zonedata)5Tool:工具中心点(TCP)。
(tooldata)6[\WObj]:工件坐标系。
(wobjdata)7Proc:例行程序名称。
(string)8 应用机器人以线性运动的方式运动至目标点,并且在目标点调用相应例行程序,在指令MoveL基础上增加例行程序调用功能。
9限制①用指令Stop停止当前指令运行,会出现一个错误信息,如需避免,采用指令StopInstr。
②不能使用指令MoveLSync来调用中断处理程序TRAP。
③不能单步执行指令MoveLSync所调用的例行程序PROC。
九运动指令MoveCSyncMoveCSync CirPoint,ToPoint,Speed[\T],Zone,Tool[\WObj],Proc;1CirPoint:中间点,默认为*。
(robotarget)2ToPoint:目标点,默认为*。
(robotarget)3Speed:运行速度数据。
(speeddata)4[\T]:运行时间控制s。
(num)5Zone:运行转角数据。
(zonedata)6Tool:工具中心点(TCP)。
(tooldata)7[\WObj]:工件坐标系。
(wobjdata)8Proc:例行程序名称。
(string)9 应用机器人通过中间点以圆弧移动方式运动至目标点,并且在目标点调用相应例行程序,在指令MoveC基础上增加例行程序调用功能。
9限制①用指令Stop停止当前指令运行,会出现一个错误信息,如需避免,采用指令StopInstr。
②不能使用指令MoveCSync来调用中断处理程序TRAP。
③不能单步执行指令MoveCSync所调用的例行程序PROC。
十运动指令MoveAbsJMoveAbsJ[\Conc,]ToJointPos[\NoEOffs],Speed[\V]│[\T],Zone[\Z][\Inpos],Tool[\WObj];1[\Conc,]:协作运动开关。