2015东大自控试题初试真题
辽宁省2015年PLC与控制技术考试题

辽宁省2015年PLC与控制技术考试题一、单项选择题(共25题,每题2分,每题的备选项中,只有 1 个事最符合题意)1、__不是调节异步电动机的转速的参数。
A.变极调速B.开环调速C.转差率调速D.变频调速2、根据题图所示的滑台向后控制梯形图,下列指令正确的是()。
A.ANI100B.AND100C.ORI100D.OR1003、一个电阻接在内阻为0.1Ω、电动势为1.5V的电源上时,流过电阻的电流为1A,则该电阻上的电压等于__V。
A.1B.1.4C.1.5D.0.14、三相电动机自耦降压起动器以80%的抽头降压起动时,电机的起动转矩是全压起动转矩的__%。
A.36B.64C.70D.815、绕组线头焊接后,要()。
A.清除残留焊剂B.除毛刺C.涂焊剂D.恢复绝缘6、__是适用于现代制造企业的组织管理方法。
A.精益生产B.规模化生产C.现代化生产D.自动化生产7、短时工作制的停歇时间不足以使导线、电缆冷却到环境温度时,导线、电缆的允许电流按__确定。
A.反复短时工作制B.短时工作制C.长期工作制D.反复长时工作制8、真空三极管的放大过程与晶体管的放大过程不同点是,真空三极管属于__控制型。
A.可逆B.功率C.电压D.电流9、移动式电动工具用的电源线,应选用的导线类型是__。
A.绝缘软线B.通用橡套电缆C.绝缘电线D.地埋线10、F系列可编程序控制器中回路并联连接用__指令。
A.ANDB.ANIC.ANBD.ORB11、关于电位的概念,__的说法是正确的。
A.电位就是电压B.电位是绝对值C.电位是相对值D.参考点的电位不一定等于零12、温度继电器广泛应用于电动机绕组、大功率晶体管等器件的__。
A.短路保护B.过电流保护C.过电压保护D.过热保护13、频敏变阻器串接在__电动机的转子绕组中,作为起动设备。
A.鼠笼式B.线绕式C.同步D.直流14、CA6140型车床主电路加电试机时,经过一段时间试运行,观察、检查电动机有无异常响声、异味、冒烟、振动和__等异常现象。
大连理工研究报告生考试自动控制真题

大连理工大学二o0五年硕士生入学考试《自动控制原理 <含20%现代)》试卷、<15分)试求图1所示电路的传递函数U c (s> / U r (S>。
、<25分)已知负反馈系统的开环传递函数为K1.试绘制以K 为参量的根轨迹图;2. 试求系统处于临界稳定状态时的闭环极点。
四、<15分)已知负反馈系统的开环传递函数为 G(s>H(s>=三!1 ,试绘制开环幅相特性曲 线,并应用奈奎斯特判据判断系统的稳定性。
五、<15分)已知负反馈系统的开环传递函数为 G(s>H(s>= ,并绘制开环频率特性对数坐标曲线,并计算相角裕度。
六、<15分)给定系统微分方程为 v-厂丿“,试确定奇点位置及类型,并绘制相平面草图。
七、<15分)设系统结构如图3所示。
试求C(z>,并判断K=1时系统的稳定性。
、<20分)给定系统结构如图2所示1. 设r(t>=n i (t>=n 2(t>=1(t>,试求系统的稳态误差e ss 。
2. 在r(t>=n i (t>=n 2(t>=1(t>情况下,如何使稳态误差八、<10分)已知离散系统的状态方程为0 IX(k+1)= °00 2aa>0,试用李雅普诺夫第二方法确定使平衡点渐进稳定的01X(k)a 取值范1"s+F1.试建立系统的状态空间描述;2 •试设计状态反馈阵,使系统闭环极点位于-2, -2处;3.K是否可以取为0.5,为什么?大连理工大学二OO四年硕士生入学考试《自动控制原理<含30%现代)》试卷、<15分)试求图1所示电路的结构图和传递函数。
/?/ 出、<10分)已知系统的特征方程为:4 3 2s4+2.5s3+2.5s2+10s -6 = 试求特征根在S平面上的分布。
的=3三、<10分)试求系统"小八—的单位脉冲响应。
东北大学现代控制理论试卷
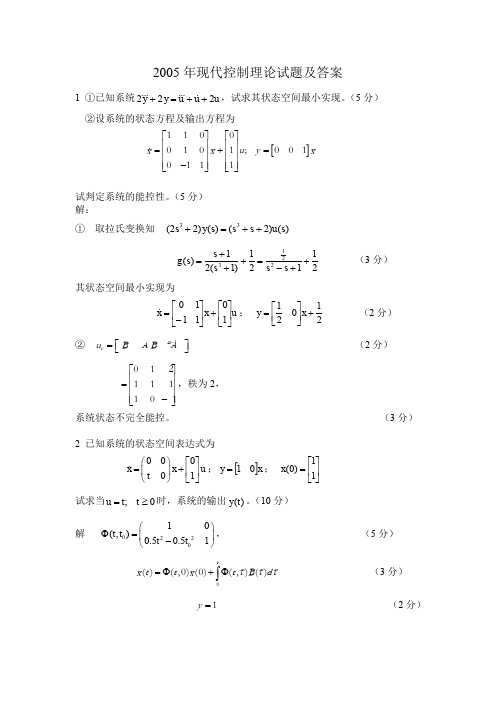
(5 分)
理想特征多项式为
f * ( x ) (s 1)3 s 3 3s 2 3s 1
列方程,比较系数求得
(1 分)
0 E 0 1
(2 分) 全维状态观测器为
ˆ A EC x ˆ Bu Ey x
(2
0 0 y , 1
————2 分
y 1 0 x ————1 分
2(5 分)试从如下的高阶微分方程求得系统的状态方程和输出方程
y 3 y 8 y 5u
解:选取状态变量 x1
y , x2 y , x3 y ,可得 ————1 分
x1 x2 x2 x3 x3 8 x1 3x3 5u y x1
1 1 1 E 1 3 2 1
又因为 E 非奇异,所以能用实现解耦控制。
c A 6 3 0 F 1 c 2 A 0 1 1
(2 分) (1 分) (2 分)
求出 u kx Lv 4 给定系统的状态空间表达式为
1 2 0 2 x 0 u, x 0 1 1 1 0 1 1 y 1 0 0 x
s 1 0 ( sI A2 ) 1 s 2
1
1
1 s 1 1 1 s 2 s 1
0 ………..……….(2 分) 1 s2
e
A2t
L
1
sI A
1 2
et 2t t e e
试判定系统的能控性。 (5 分) 解: ① 取拉氏变换知
(2s3 2) y(s) (s3 s 2)u(s)
g ( s)
东北大学《计算机控制系统》期末考试必备真题集(含答案)21

计算机控制系统答案单选题1.当二阶系统的时间响应的阻尼比为0时,是___B_系统。
A欠阻尼 B无阻尼 C临界阻尼 D过阻尼2.连续控制系统的不稳定性条件是S平面的__D____部分。
A单位圆内 B单位圆外 C左半 D右半3.计算机控制系统是以A_____为核心部件的自动控制系统。
A计算机 B控制器 C转换器 D保持器4.下列哪个不是计算机控制系统控制过程的步骤?BA数据采集 B数据转换 C计算机控制量 D输出控制信号5.下列哪个不属于计算机控制系统的过程输入通道。
DA温度 B压力 C流量 D继电器6.单位阶跃输入下输出响应,经过_B___周期就稳定在设定值上。
A.TB.2TC.3TD.4T7.低通滤波器可以让高于_A____Hz虑掉。
A.50B.60C.70D.808.计算机控制系统稳定性条件是Z平面的__A____部分。
A单位圆内B单位圆外C左半D右半9.连续控制系统的稳定性条件是S平面的__C____部分。
A单位圆内 B单位圆外 C左半 D右半10.下列属于共模干扰?DA电容的静电耦合 B长线传输的互感 C磁场耦合 D变压器漏电判断题11.传递函数的分子式系统的特征多项式,代表系统的固有特性F12.连续控制系统的传递函数分母式系统的特征多项式,代表系统的固有特性?T13.计算机的硬件对计算机控制系统的非常重要,管理计算机的程序及过程控制的应用程序。
F14.被控对象可以是模拟量,不可以是开关量。
F15.一般采用多路通道共享采样/保持或模数转换器。
T16.转速传感器的激励绕组与输出绕组之间在空间相差180°F17.PID的积分环节经常单独使用。
F18.空间辐射干扰中来自通道的干扰最大。
F19.低通滤波器可让80Hz的工频信号无衰减地通过。
F20.计算机控制系统的分析与设计是以系统的数学模型为基础。
T简答题21.传递函数的特点?"传递函数具有以下特点:1)传递函数的分母是系统的特征多项式,代表系统的固定特征;分子代表输入与系统的关系,而与输入量无关,因此传递函数表达了系统本身的固有特性。
全国名校自动控制原理考研真题汇编(含部分答案)
2013年中国 学技术大学848 动控制原理
2014年中国 学技术大学848 动控制原理
5.北京
天大学 动控制原பைடு நூலகம் 合
2012年北京
天大学931 动控制原理 合
2013年北京
天大学931 动控制原理 合
2014年北京
天大学931 动控制原理 合
6.山东大学 动控制原理
2016年山东大学847 动控制原理(含现代控制理 )
8.其他院校自动控制原理考研 真题(含部分答案)
2010年华中科技大学829自动控制原理考研真 题及答案
2011年南京大学961自动控制原理考研真题
2011年重庆大学839自动控制原理一考研真题
2013年厦门大学844自动控制原理考研真题
2013年华南理工大学813自动控制原理考研真 题
2014年华南理工大学813自动控制原理考研真 题
2015年华南理工大学813自动控制原理考研真 题
2016年华南理工大学813自动控制原理考研真 题
2017年华南理工大学813自动控制原理考研真 题
2018年华南理工大学813自动控制原理考研真 题
2012年电子科技大学839自动控制原理考研真 题及详解
参 案:
2013年电子科技大学839自动控制原理考研真 题及详解
参 案:
2014年电子科技大学839自动控制原理考研真 题
4.中国科学技术大学自动控制 原理考研真题
2013年中国科学技术大学848自动控制原理考 研真题
6.山东大学自动控制原理考研 真题
2016年山东大学847自动控制原理(含现代控 制理论)考研真题
2017年山东大学847自动控制原理(含现代控 制理论)考研真题
自动控制19套试题及答案详解(DOC)

第1页一.填空题。
(10分)1.传递函数分母多项式的根,称为系统的2. 微分环节的传递函数为3.并联方框图的等效传递函数等于各并联传递函数之4.单位冲击函数信号的拉氏变换式5.系统开环传递函数中有一个积分环节则该系统为型系统。
6.比例环节的频率特性为。
7. 微分环节的相角为。
8.二阶系统的谐振峰值与有关。
9.高阶系统的超调量跟有关。
10.在零初始条件下输出量与输入量的拉氏变换之比,称该系统的传递函数。
二.试求下图的传第函数(7分)三.设有一个由弹簧、物体和阻尼器组成的机械系统(如下图所示),设外作用力F(t)为输入量,位移为y(t)输出量,列写机械位移系统的微分方程(10分)第2页四.系统结构如图所示,其中K=8,T=0.25。
(15分)(1)输入信号x i(t)=1(t),求系统的响应;(2)计算系统的性能指标t r、t p、t s(5%)、бp;(3)若要求将系统设计成二阶最佳ξ=0.707,应如何改变K值第 3 页)1001.0)(11.0()(++=s s s Ks G 五.在系统的特征式为A (s )=6s +25s +84s +123s +202s +16s+16=0,试判断系统的稳定性(8分)(12分)七.某控制系统的结构如图,其中 要求设计串联校正装置,使系统具有K ≥1000及υ≥45。
的性能指标。
(13分)s T s s s G 25.0,)4(1)(=+=.八.设采样控制系统饿结构如图所示,其中 试判断系统的稳定性。
(10分)九. 已知单位负反馈系统的开环传递函数为: 试绘制K由0 ->+∞变化的闭环根轨迹图,系统稳定的K 值范围。
(15分),)4()1()(22++=s s Ks G第5页一、填空题:(每空1.5分,共15分)1.当扰动信号进入系统破坏系统平衡时,有重新恢复平衡的能力则该系统具有。
2.控制方式由改变输入直接控制输出,而输出对系统的控制过程没有直接影响,叫。
东北大学自动控制原理考研真题(二)2008-2015
2������
+
2)
试画出根轨迹草图,并用根轨迹法确定使闭环主导极点的阻尼比
ξ = 时0.���5���������值。
五、(20 分)已知系统的开环传递函数为:
������������ (s) = ������(0.25������
6 + 1)(0.06������
+
1)
试绘制伯德图,求相位裕度及增益裕度,并判断闭环系统的稳定性。
图 3 所示,求微分时间常数τ。
Xr(s)
-
Kk s(s+1)
Xc(s)
图 2. 题三原系统结构图
Xr(s)
-
E(s)
-
4 s(s+1)
τs
Xc(s)
图 3. 题三改善后系统结构图
四、(20 分)已知单位负反馈系统的开环传递函数为:
������������ (s) = (������
+
������������ 16)2(+������
东北大学 2008 年初试试题 考试科目:自动控制原理 一.简要回答下面问题: 1.对于一般的控制系统,当给定量突然增加时,输出量的暂态过程有哪几种情况? 2.画图说明当系统处于衰减振荡过程时暂态性能指标。 二.试绘制图 1 所示 RC 无源网络的动态结构图,并写出传递函数
C
R2
ur
R1
uc
三.1.试述减小稳态误差的措施。
六、(20 分)试写出串联引前(微分)校正装置的传递函数,并说明
其作用和适用范围。
七、(20 分)
(1)试说明用描述函数法分析非线性系统的基本思想:
(2)设继电气特性为:
y(x) =
东北大学信息科学与工程学院839自动控制原理历年考研真题汇编(含部分答案)(圣才出品)
2015年东北大学839自动控制原理考研真题(回忆版)
一、简述题
1.如何区分线性系统和非线性系统.它们有什么特点。
2.线性系统的三个性能指标都是什么?它们对应在对数频率特性图像中是如何表示的?
二、根据微分方程画出系统的动态结构图.并求出。
本题共六个微分方程.输入为.输出为。
三、某系统在单位阶跃输入作用下.输出如图所示。
求出系统的K.a和b。
图:稳态值2.最大值2.25.峰值时间2s
四、
1.已知道系统的开环传递函数K.画出系统的根轨迹图。
2.根据系统结构图确定系统阻尼比ξ的最小值.并写出此时系统对应的闭环极点。
3.根据系统根轨迹图.分析当K从0变化到+∞时系统的稳定性。
五、画出系统的幅相频率特性图像.并且用奈奎斯特稳定判据分析系统稳定性.系统的开环传递函数为。
六、已知矫正系统如图所示.其中L是矫正前的系统开环频率特性.是矫正装置的倒特性.’是大回路的动态特性。
1.求出矫正以前的系统传递函数。
2.求出系统等效开环传递函数。
3.求出矫正以后系统的穿越频率和相角裕度。
(参考指定教材300页的图)
七、1.已知非线性系统结构图,问串联饱和非线性应满足什么条件系统才能稳定工作?
2.把系统等效为非线性与线性串联的形式.并画出等效传递函数。
八、已知离散系统结构图如下图所示.求出(1)中的.图(2)的C(z)。
(需用指定教材309页的一系列方法做.图为指定教材401页表中采样系统的综合。
)
2014年东北大学839自动控制原理考研真题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
r
N1
M1
h1
N2 M
2
h2
1 (s 1)
10 (s 1)
1 s
c
八、(20 分)采样控制系统如图所示, 1、 (10 分)求图 (a ) 的脉冲传递函数
C(z) ; R (z)
2、 (10 分)求图 (b) 的输出信号的 z 变换 c( z )
r
T
G(s)
c
T
G3 (s)
F1 (s)
r
T
G1 (s)
G2 (s)
c
F2 (s)
T
F (s)
图(a)
图(b)
L( ) R(s)
G1 (s)
G2 (s)
G3 (s)
C (s)
46
L0
1
Gc (s)
-2 1
0.1
0.75
L
7.5 10
-2 1
20 100
1
Lf
1
-2
-3
图(a)
七、(20 分)非线性系统结构图如图所示
图(b)
1、说明非线性环节 N1 、 N 2 的参数满足什么条件,系统才能工作?(5 分) 2、从系统稳定性意义上,将系统规划为非线性环节和线性环节串联的典型结构(15 分)
0 .3
K g (s 2)(s 3) s(s 1)
t /s
10(s 2 2s 5) ,绘制系统的开环幅相特性曲线,并用 (s 0.5)(s 2)
六、(20 分)反馈校正系统方框图如图 (a ) 所示,对数频率特性曲线如图 (b) 所示,其中 L0 为校正前的 对数频率特性曲线, L 为反馈校正环节的对数频率特性曲线, L f 为小闭环环节的对数频率特性曲线。 1、校正前的系统的单位斜坡输入的稳态误差(5 分) ; 2、校正后的等效开环传递函数(5 分) ; 3、校正后的穿越频率 c 及相角裕量 r (c ) (10 分)
Y (s)
y (t )
2.7 2.5
b
四、(20 分)已知系统的开环传递函数为 Wk (s) 1、绘制系统闭环根轨迹; 2、求系统最小的阻尼比,并求出与之对应的闭环极点; 3、分析 K g 的变化对系统性能的影响 (0 K g ) 五、(20 分)已知系统的开环传递函数为 Wk (s) 奈奎斯特判据判断系统的稳定性
输入, 、 K 0 、 K1 、 T 为常数。 1、画出系统的动态结构图(10 分) ; 2、求传递函数
X c (s) X (s) 、 c (10 分) X r (s) X d (s)
三、 (20 分)系统的结构图及单位阶跃响应如下图所示,求 K 、 a 、 b 的值
R(s)
பைடு நூலகம்
K s(s a )
2015 年东北大学研究生考试自动控制原理试题
一、简答题(10 分) 1、如何区分线性系统与非线性系统?(4 分) 2、控制系统三个性能要求指标是什么,与系统开环对数幅频特性如何对应?(6 分)
c (t ) K1 xd (t ) , x2 (t ) K 0 x1 (t ) , 二 、( 20 分 ) 系 统 的 微 分 方 程 组 如 下 : x1 (t ) xr (t ) x 4 (t ) x3 (t ) , x5 (t ) x4 (t ) xc (t ) , x c (t ) x5 (t ) xc (t ) ,其中 xr (t ) 、 xd (t ) 为 x3 (t ) xr (t ) xd (t ) x5 (t ) , Tx