液压机械臂制作步骤示意(1)
机械手臂制作

Wii Nunchuck手柄控制的6自由度机械臂之控制电路的安装在4号板上安装三个M3*10的单头铜柱,下面用圆帽螺母固定好。
将DFRduino Duemilanove 328控制板安装在4号盘上。
将Xbee传感器扩展板V5插在328控制板上面。
将电池盒安装上。
将电源正负极线连接在扩展板上。
将最先安装的舵机作为1号舵机,依次按照舵机安装的顺序排号,将1~6号舵机线插在8~13数字口上。
舵机线的黄色线为信号线,红色为VCC,褐色为GND。
长度不够的舵机线可以连接一个舵机延长线。
所有的舵机线都插好后,准备一个黑塑料管。
将舵机线缠好。
至此机械手臂就安装完成了,可以通过arduino进行编程操作。
在机械臂套件的基础上可以添加一个Wii Nunchuck手柄组成有趣的运动控制。
准备好Wii Nunchuck手柄准备好Wii Nunchuck手柄Arduino适配器。
一共有4个接线端分别是:- :电源地GND,+:电源+5V,d :IIC引脚通信SDA口,c : IIC引脚通信SCL口将适配器上的各个IIC引脚和扩展板上的IIC引脚一一对应连接好。
将适配器和Wii Nunchuck手柄连接好这样我们的电路部分就安装好了。
接下来就可以编写程序,利用手柄来控制机械手。
源代码:#include <Servo.h>#include <math.h>#include <stdlib.h>#include "Wire.h"#include "WiiChuck.h"//定义舵机Servo servo1;Servo servo2;Servo servo3;Servo servo4;Servo servo5;Servo servo6;WiiChuck wii = WiiChuck();int x,y,xa,xa1=2,xa2,xa3,xa4,ya,ya1,ya2,ya3,ya4,c,z;//定义变量void act_init()//初始化动作子函数{servo1.write(90);servo2.write(70);servo3.write(30);servo4.write(90);servo5.write(90);servo6.write(30);}void setup(){//定义舵机控制口servo1.attach(8);servo2.attach(9);servo3.attach(10);servo4.attach(11);servo5.attach(12);servo6.attach(13);act_init();//初始化wii.initWithPower();//初始化电源引脚}void loop(){while(1){if(true==wii.read()){//读取手柄的值//读取手柄的值x=wii.getJoyAxisX();//摇杆x轴的值y=wii.getJoyAxisY();//摇杆y轴的值xa1=wii.getAccelAxisX();//手柄x方向摆动的值 ya1=wii.getAccelAxisY();//手柄y方向摆动的值 c=wii.getButtonC();//手柄按键c的值z=wii.getButtonZ();//手柄按键z的值delay(30);x=wii.getJoyAxisX();//摇杆x轴的值y=wii.getJoyAxisY();//摇杆y轴的值xa2=wii.getAccelAxisX();//手柄x方向摆动的值 ya2=wii.getAccelAxisY();//手柄y方向摆动的值 c=wii.getButtonC();//手柄按键c的值z=wii.getButtonZ();//手柄按键z的值delay(30);x=wii.getJoyAxisX();//摇杆x轴的值y=wii.getJoyAxisY();//摇杆y轴的值xa3=wii.getAccelAxisX();//手柄x方向摆动的值 ya3=wii.getAccelAxisY();//手柄y方向摆动的值 c=wii.getButtonC();//手柄按键c的值z=wii.getButtonZ();//手柄按键z的值delay(30);x=wii.getJoyAxisX();//摇杆x轴的值y=wii.getJoyAxisY();//摇杆y轴的值xa4=wii.getAccelAxisX();//手柄x方向摆动的值 ya4=wii.getAccelAxisY();//手柄y方向摆动的值 c=wii.getButtonC();//手柄按键c的值z=wii.getButtonZ();//手柄按键z的值delay(30);xa=(xa1+xa2+xa3+xa4)/4;//取均值xa=xa-40;//为了让90成为中点值ya=(ya1+ya2+ya3+ya4)/4;//取平均值ya=ya-40;}if((x==130||x==131)&&y==255&&z==1)//摇杆位置为向前 {if(xa<30)//限制最小值xa=30;if(xa>150)//限制最大值xa=150;servo1.write(xa);//给舵机旋转的度数delay(10);}else if((x==130||x==131)&&y==0)//摇杆位置向后{if(ya<30)ya=30;if(ya>150)ya=150;servo2.write(ya);//给舵机旋转的度数delay(10);}else if(x==0&&(y==130||y==129))//摇杆的位置向左{ya=175-ya;//为了让手柄在Y轴向前的时候,舵机3也向前 if(ya<20)ya=20;if(ya>150)ya=150;servo3.write(ya);//给舵机旋转的度数delay(10);}else if(x==255&&(y==130||y==129))//摇杆的位置向右 {ya=175-ya;if(ya<30)ya=30;if(ya>80)ya=80;servo4.write(ya);//给舵机旋转的度数delay(10);}else if(c==0)//手柄按键c按下{if(xa<30)xa=30;if(xa>150)xa=150;servo5.write(xa);//给舵机旋转的度数delay(10);}else if(z==0)//手柄按键z按下{if(ya<40)ya=40;if(ya>110)ya=110;servo6.write(ya);//给舵机旋转的度数delay(10);}}}。
毕业设计大型液压装载机动臂锻造工艺及模具设计说明书

大型液压装载机动臂锻造工艺及模具设计说明书摘要本次项目主要是通过铸改锻以及尝试通过修改锻造工艺和模具设计的方式来使动臂的性能加强,进而能够达到降低成本的同时延长工件寿命的目的。
由于铸造方式容易产生缩孔与与疏松,而锻造则会使坯料反复压制,让纤维连续,坯料中的疏松处压合,提高金属的致密度,细化金属晶粒,因此强度大于铸件。
设计过程中,锻件图和设备吨位已知,因此主要目的是将铸改锻后的锻造工艺和锻模设计成功运用于锻件的生产当中去,并且使生产出来的锻件满足力学性能的要求。
在这一过程中包括飞边槽形式和尺寸、制坯工步、切边模等都需要反复地设计修改,最终达到理论上的要求。
主要设计步骤有:分析锻件图;计算主要参数;确定设备吨位;确定毛边槽形式和尺寸;绘制计算毛坯图;选择制坯工步;确定坯料尺寸;制坯型槽设计;锻模型槽设计;绘制锻模图等。
通过此次铸改锻的生产方式转变,认识到锻造工艺的发展空间,为进一步提高生产效率提供了机会,也开阔了我们的视野。
关键词:动臂,锻造,模具设计,主要参数,绘制LARGE HYDRAULIC LOADER ARM FORGING TECHNOLOGY AND DIEDESIGN SPECIFICATIONABSTRACTThis project is mainly through casting and forging and attempts to modifytheproperties of forging process and die design way to boom to strengthen,and can reduce the cost and to prolong the life of the workpiece.Because thecasting prone to shrinkage and osteoporosis, while forging will make the blankrepeatedly pressing, let loose in continuous fiber, blank pressing,increase thedensity of metal, metal grain refinement, so the strength is higher than that ofcastings.In the process of design, forging drawings and equipment tonnage isknown, so the main objective is the forging process and die design of castingforging aftersuccessfully applied in forging production, and the production offorgings meet the requirements of mechanical properties. In this process,including the flash groove forms and sizes, making blank step, trimming die need to repeatedlymodify the design, finally achieve the theoretical requirements.The main design steps are: analysis of forging drawing; main parameters;determine the equipment tonnage; determine the groove forms and sizes;drawing blank map; selection of billet step; Determination of blank size; design of blank making groove; forging die groove design drawing die drawings.The casting and forging of the transformation of the mode of production, realizethe development space of forging technology, provides the opportunity to furtherimprove the production efficiency, but also broaden our view.KEY WORDS:The boom,Forging,Mold design,The main parameters,Draw目录前言第1章模锻件图设计§1.1 绘制锻件图的过程§1.1.1 确定分模的位置§1.1.2 锻件的质量§1.1.3 锻件的复杂系数§1.1.4 确定余块加工余量和公差§1.1.5 模锻斜度§1.1.6 圆角半径§1.1.7 技术条件§1.2 锻件的主要参数§1.2.1 锻件的周边长度§1.2.2 锻件的质量§1.2.3 锻件的体积第2章确定锻锤吨位第3章确定毛边槽形式和尺寸第4章热锻件设计第5章绘制计算毛坯图§5.1 计算毛坯图的用途§5.1.1 锻件选择坯料工步的依据§5.1.2 确定坯料尺寸的依据§5.1.3 设计制坯模腔的依据第6章制坯工步选择第7章确定坯料尺寸第8章制坯型槽设计§8.1 滚挤型槽设计的选用§8.2 弯曲型槽的设计第9章锻模模膛设计§9.1 预锻模膛设计§9.2 终锻模膛设计§9.2.1 终锻模膛的壁厚第10章锻模结构设计§10.1 检验角、燕尾和键槽尺寸的确定§10.2 模块尺寸第11章模具参数校核第12章模锻工艺流程第13章锻前加热、锻后冷却及热处理要求§13.1 确定加热方式及锻造温度范围§13.2 确定加热时间§13.3 确定冷却方式及规范§13.4 确定锻后热处理方式及要求参考文献前言随着我国现代化建设进程的不断推进,工程机械行业的发展得到极大的促进,市场对工程机械的结构提出了越来越高的要求,不仅要求有较高的承载能力,高的疲劳寿命,还要求减少原材料的使用,降低生产成本。
机械手臂部的设计及有关计算
机械手臂部的设计及有关计算手臂部件是机械手的主要握持部件。
它的作用是支撑腕部和手部(包括工件或工具),并带动它们作空间运动。
手臂运动应该包括3个运动:伸缩、回转和升降。
本章叙述手臂的伸缩运动,手臂的回转和升降运动设置在机身处,将在下一章叙述。
臂部运动的目的:把手部送到空间运动范围内任意一点。
如果改变手部的姿态(方位),则用腕部的自由度加以实现。
因此,一般来说臂部应该具备3个自由度才能满足基本要求,既手臂伸缩、左右回转、和升降运动。
手臂的各种运动通常用驱动机构和各种传动机构来实现,从臂部的受力情况分析,它在工作中即直接承受腕部、手部、和工件的静、动载荷,而且自身运动较多。
因此,它的结构、工作范围、灵活性等直接影响到机械手的工作性能。
1.1 臂部设计的基本要求一、臂部应承载能力大、刚度好、自重轻(1)根据受力情况,合理选择截面形状和轮廓尺寸。
(2)提高支撑刚度和合理选择支撑点的距离。
(3)合理布置作用力的位置和方向。
(4)注意简化结构。
(5)提高配合精度。
二、臂部运动速度要高,惯性要小机械手手部的运动速度是机械手的主要参数之一,它反映机械手的生产水平。
对于高速度运动的机械手,其最大移动速度设计在10001500mm s,最大回转角速度设计在0180s内,大部分平均移动速度为1000mm s,平均回转角速度在090s。
在速度和回转角速度一定的情况下,减小自身重量是减小惯性的最有效,最直接的办法,因此,机械手臂部要尽可能的轻。
减少惯量具体有3个途径:(1)减少手臂运动件的重量,采用铝合金材料。
(2)减少臂部运动件的轮廓尺寸。
(3)减少回转半径 ,再安排机械手动作顺序时,先缩后回转(或先回转后伸缩),尽可能在较小的前伸位置下进行回转动作。
(4)驱动系统中设有缓冲装置。
三、手臂动作应该灵活为减少手臂运动之间的摩擦阻力,尽可能用滚动摩擦代替滑动摩擦。
对于悬臂式的机械手,其传动件、导向件和定位件布置合理,使手臂运动尽可能平衡,以减少对升降支撑轴线的偏心力矩,特别要防止发生机构卡死(自锁现象)。
液压机械中机械手的手臂设计516.
继续教育学院毕业设计(论文)题目:液压传动技术在农业机械中的应用专业名称:机电一体化工程学号:017115110017学生姓名:朱行强指导教师:摘要机械手的组成和分类,机械手的自由度和座标型式,气动技术的特点,PLC 控制的特点及国内外的发展状况。
本文简要地介绍了工业机器人的概念,本文对机械手进行了总体方案设计,确定了机械手的座标型式和自由度,确定了机械手的技术参数。
同时,分别设计了机械手的夹持式手部结构以及吸附式手部结构;设计了机械手的手腕结构,计算出了手腕转动时所需的驱动力矩和回转气缸的驱动力矩;设计了机械手的手臂结构,设计了手臂伸缩、升降用液压缓冲器和手臂回转用液压缓冲器。
设计出了机械手的气动系统,绘制了机械手气压系统工作原理图。
利用可编程序控制器对机械手进行控制,选取了合适的PLC型号,根据机械手的工作流程制定了可编程序控制器的控制方案,画出了机械手的工作时序图和梯形图,并编制了可编程序控制器的控制程序。
关键词:工业机器人,机械手,气动,可编程序控制器(PLC)目录第一章机械手设计任务书1.1机械手的组成1.2机械手的主要运动1.3 课题的提出、任务、技术特性第二章机械手臂部机构设计2.1臂部设计的的基本要求2.2臂部的结构选择2.3手臂偏重力矩的计算2.4升降导向立柱不自锁条件2.5手臂升降液压缸驱动力的计算2.6手臂升降液压缸参数计算2.7手臂回转液压缸驱动力矩计算2.8手臂回转液压缸主要参数第三章联接板第四章螺钉与液压缸壁厚的校核4.1手臂液压缸螺钉的校核4.2动片与输出轴之间的联接螺钉校核4.3手臂升降液压缸筒的壁厚校核第五章手臂液压系统原理设计及液压图5.1液压泵的选择5.2液压系统的原理图如下参考文献致谢²\第一章机械手设计任务书工业机械手是能够模仿人手部的部分动作,按给定的程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置,在工业上生产中应用的工业机械手简称为“机械手”。
冲压机械手---手臂部分设计(全套图纸)Word

冲压机械手—手臂部分设计摘要本文所设计的冲压机械手用于搬运工件,为了增加本机械手的通用性,在结构尽可能紧凑的情况下,最大限度地使工业机械手具有较大的抓取范围。
本文主要介绍了冲压机械手的概念、组成和分类,机械手的自由度和坐标形式、运动及国内外的发展状况。
对冲压机械手进行总体方案设计,首先确定了机械手的坐标形式为圆柱坐标型,自由度数为5,接着确定了机械手的驱动装置为液压缸,然后确定了机械手的主要技术参数。
同时,设计了机械手的手部结构形式为滑槽杠杆式钳爪、手腕的结构形式为采用电机带动腕回转、臂部结构形式采用双导向杆导向,机身结构形式为升降缸置于回转缸之上的结构形式,计算出了夹紧工件所需的驱动力、手腕转动时所需的驱动力矩、手臂伸缩所需的驱动力、手臂俯仰所需的驱动力、手臂升降所需的驱动力和手臂回转所需的驱动力矩。
继而设计了冲压机械手的各个部分液压缸的尺寸和结构及各个部分之间连接与支承部件的结构与尺寸。
关键词液压驱动;冲压机械手;液压缸目录摘要...... . (I)第1章绪论 (1)1.1 机械手的含义 (1)1.2 机械手的产生、应用与发展 (1)1.2.1 机械手的产生(简史) (1)1.2.2 应用简况 (2)1.2.3 发展趋势 (2)1.3 冲压机械手的组成与运动 (3)1.3.1 冲压机械手的组成 (3)1.3.2 冲压机械手的运动 (5)第2章冲压机械手的手部设计 (10)2.1 概述 (10)2.2 手部机构形式 (10)2.2.1 手爪 (10)2.2.2 传动装置 (10)2.2.3 驱动装置 (10)2.3 前爪式手部机构的选用要点 (11)2.4 滑槽杠杆式钳爪的夹紧力分析与计算 (11)2.5 滑槽杠杆式钳爪手部机构的驱动力计算 (13)2.6 手部夹紧液压缸的设计与计算 (13)2.7 本章小结 (14)第3章冲压机械手的腕部设计 (15)3.1 概述 (15)3.2 腕部回转力矩的计算 (15)M (15)3.2.1 摩擦阻力矩摩M (15)3.2.2 工件重心偏置引起的偏置力矩偏3.2.3 腕部启动时的惯性阻力矩M (16)惯3.3 本章小结 (17)第4章工业机械手臂部的设计 (18)4.1 概述 (18)4.2 冲压机械手臂部的结构形式 (18)4.2.1 冲压机械手臂部伸缩运动的结构 (19)4.2.2 冲压机械手臂部俯仰运动的结构 (19)4.2.3 冲压机械手臂部回转及升降的结构 (20)4.2.4 导向装置 (20)4.3 冲压机械手臂部运动驱动液压缸的设计与计算 (21)4.3.1 手臂水平伸缩运动驱动液压缸的计算 (21)4.3.2 手臂垂直升降运动驱动液压缸的设计与计算 (22)4.4 冲压机械手的液压缓冲装置 (23)4.5 本章小结 (24)结论 (25)致谢 (26)参考文献 (27)第1章绪论1.1机械手的含义“机械手”(mechanical hand,也被称为“自动手”(auto hand), 多数是指附属于主机、程序固定的自动抓取、操作装置(国内一般称作机械手或者专用机械手)。
机械臂结构设计
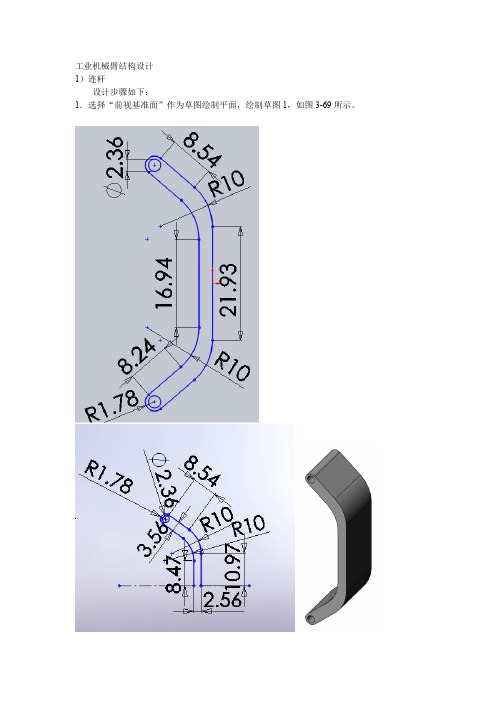
工业机械臂结构设计1)连杆设计步骤如下:1.选择“前视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
2.点选拉伸特征图标,在属性管理器中输入:终止条件:两侧对称,拉伸高度值15mm,确定,完成实体造型1。
3.选择“右视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
4.点选切除-拉伸特征图标,在属性管理器中输入拉伸高度值61mm,确定,完成实体造型2。
5.选择图示边线,点选圆角特征按钮,添加半径为5mm的圆角。
完成连杆实体造型如图所示。
2)连接件11.选择“前视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
3)连接件21.选择“前视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
2.点选拉伸特征图标,在属性管理器中输入终止条件:两侧对称,拉伸高度值15mm,确定,完成实体造型。
3.选择“上视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
4.点选切除-拉伸特征图标,在属性管理器中输入终止条件:给定深度,拉伸高度值12mm,确定,完成实体造型2。
5.选择图示表面作为草图绘制平面,绘制草图1,如图3-69所示。
6.点选切除-拉伸特征图标,在属性管理器中输入拉伸高度值40mm,确定,完成实体造型3。
7.选择“前视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
8.点选拉伸特征图标,在属性管理器中输入终止条件:两侧对称,拉伸高度值12mm,确定,完成实体造型。
9.选择图示表面作为草图绘制平面,绘制草图1,如图3-69所示。
10.点选切除-拉伸特征图标,在属性管理器中输入拉伸高度值40mm,确定,完成实体造型3。
11.选择“前视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
12.点选切除-拉伸特征图标,在属性管理器中输入拉伸高度值20mm,确定,完成实体造型3。
13.选择图示表面作为草图绘制平面,绘制草图1,如图3-69所示。
14.点选拉伸特征图标,在属性管理器中输入终止条件:给定深度,拉伸高度值5mm,确定,完成实体造型。
液压传动自动上料机械手结构设计

液压传动自动上料机械手结构设计液压传动自动上料机械手是一种用于工业生产线的自动化机器人,用于将原材料或零件从一个位置移动到另一个位置。
液压传动自动上料机械手具有强大的承载能力、高速运动和高精度定位的优点,适用于重型工件的搬运和装配。
下面将分析液压传动自动上料机械手的结构设计。
1.机械手的框架结构:2.液压系统:液压传动是液压传动自动上料机械手的核心部分。
液压系统由液压泵、液压缸、液压阀门等组成。
通过液压泵提供的压力,液压缸可以实现各种动作,例如伸缩、旋转、举升等。
液压阀门控制液压传动系统的流量和压力,实现机械手的各种动作和操作。
3.机械手臂的设计:机械手臂是液压传动自动上料机械手的关键组成部分。
机械手臂通常由多个关节连接而成,可以实现多自由度的运动。
机械手臂的关节通过液压缸驱动,使机械手能够完成各种复杂的动作和任务。
机械手臂材质需要具有足够的强度和刚度,同时要求尽量轻量化,以减少能量消耗和摩擦损失。
4.末端执行器的设计:末端执行器是液压传动自动上料机械手的末端装置,用于抓取、搬运或装配工件。
末端执行器通常由夹具、卡盘或吸盘等组成,具有可调节的抓取力和灵活的动作。
末端执行器需要与机械手臂的关节连接,同时能够快速、稳定地完成工件的抓取和释放。
5.控制系统:液压传动自动上料机械手的控制系统由电气控制和液压控制两部分组成。
电气控制系统包含传感器、电机、编码器和控制器等,用于实时监测和控制机械手的运动和状态。
液压控制系统包含液压泵、液压缸、液压阀门等,用于控制机械手的动作和操作。
综上所述,液压传动自动上料机械手的结构设计涉及框架结构、液压系统、机械手臂、末端执行器和控制系统等多个方面。
合理的结构设计可以提高机械手的稳定性、精度和可靠性,从而提高生产效率和产品质量。
四自由度机械手的液压系统设计

四自由度机械手的液压系统设计【摘要】机械手是指能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
机械手通常用作机床或其他机器的附加装置,如在自动机床或自动生产线上装卸和传递工件,在加工中心中更换刀具等。
机械手按驱动方式的不同又可分为液压式、气动式、电动式、机械式,而本文讨论的是具有四自由度的机械手的液压系统设计。
【关键词】机械手;液压系统;设计1.机械手结构分析本文所研究的搬运机械手具有四个自由度,分别为手腕的旋转运动,手臂的伸缩运动、旋转运动和升降运动,坐标形式为圆柱坐标,采用液压驱动控制方式,其结构示意图如图1所示。
图1 机械手结构示意图2.机械手关键液压回路分析在驱动机械手运动过程中,其中夹紧放松动作,旋转动作和伸缩动作是主要的动作,这里对这些动作的回路进行分析。
(1)夹紧回路夹紧回路采用的是O型三位四通换向阀来进行锁定,如图2所示。
1—三位四通换向阀2—调速阀3—二位三通换向阀图2 夹紧回路(2)旋转回路对于机械手的旋转动作,采用了液压马达实现,原理如图3所示。
1—二位二通换向阀2—调速阀3—三位四通换向阀4—液压马达图3 旋转回路3.液压系统设计液压系统作为搬运机械手的重要驱动方式,主要用来使机械手完成工作夹/松、手部摆动、手臂水平位移和垂直升降等动作,主要由油缸、油泵、油压马达和各种阀组成。
系统主要技术参数如下:抓重:20kg自由度:4坐标形式:圆柱坐标最大工作半径:1500mm手臂最大中心高度:700mm手臂运动参数:伸缩行程:700mm伸缩速度:400mm/s升降行程:300m m升降速度:50mm/s回转范围:0°—180°回转速度:70°/s手腕运动参数:回转范围:0°—180°回转速度:9 0°/s手指夹持范围:∮30mm—∮60mm手指握力:500N根据系统的工作要求和特点,拟定的四自由度搬运机械手液压系统原理图如图4所示。