机械手故障排除法
六轴机械手维修知识点总结

六轴机械手维修知识点总结六轴机械手维修知识点总结一、引言随着工业自动化的不断发展,机械手在生产线上的应用越来越广泛。
作为自动化生产的关键设备之一,六轴机械手由于其多功能性和高精度性能而备受青睐。
然而,在长时间运行和高强度工作环境下,六轴机械手也会遭遇故障和损坏,因此掌握一些六轴机械手的维修知识是十分重要的。
本文将对六轴机械手的维修知识点进行总结,旨在帮助读者更好地了解和解决六轴机械手的故障。
二、常见故障现象及解决方法1. 机械结构松动机械手在长时间工作后,由于振动和冲击等原因,可能会导致机械结构的松动。
这时,我们可以采取以下措施进行维修:(1)检查和紧固螺丝:检查机械手的关键部件和连接螺丝是否松动,如发现松动,应及时使用扳手进行紧固。
(2)润滑机械部件:适量涂抹润滑油或润滑脂以减少机械零部件的磨损和摩擦,提高其工作效率。
2. 电气故障六轴机械手的电气系统是其正常工作的关键,常见的电气故障有电机启动困难、电机无法正常运转等问题。
解决这些故障可采取以下措施:(1)检查电源线路:检查电源线路是否连接正常,排除电源线路损坏或接触不良的问题。
(2)检查电机驱动器:检查电机驱动器是否工作正常,如有故障则更换或修复。
(3)检查电机传感器:如光电传感器、编码器等,检查其位置和连接是否正确,调整或更换故障的传感器。
3. 控制系统故障六轴机械手的控制系统是控制机械手动作和运行的核心,常见的控制系统故障有控制器无响应、程序错误等。
针对这些故障,我们可以采取以下方法:(1)检查程序:检查机械手的程序是否正确,程序中是否存在错误或冲突,排除程序问题。
(2)检查控制器连接:检查控制器与机械手的连接是否正常,排除连接故障。
(3)重启控制系统:尝试重新启动机械手的控制系统,有时候故障可能只是由于临时的软件或硬件错误而造成的,重启系统后可以恢复正常。
三、维修前的注意事项在进行六轴机械手的维修时,我们应该注意以下几点:1. 安全第一:在进行任何维修工作之前,务必断开电源并确保机械手处于完全停止状态,保证自己和他人的安全。
SINUMERIK810D系统机械手故障排除与解决方法

SINUMERIK810D系统机械手故障排除与解决方法SINUMERIK810D系统机械手故障排除与解决方法摘要:SINUMERIK是西门子为其数控系统注册的品牌,90年代末西门子推出SINUMERIK 810D系统。
SINUMERIK810D系统的特点是在数字化控制的领域中,第一次将CNC和驱动控制集成在一块主板上,快速的循环处理能力,使其在模块加工中独显威力。
它比以往的数控系统更加容易使用,更加简单易懂,它的硬件结构更加清晰、小巧、智能化,显示界面好更加清晰饱满,功能更加先进,反响速度更快。
它以其高质量、高性能,得到了广阔用户的认可,就其系统本身而言完全经受得了连续长时间的工作考验,当然故障还是难免的,总结我在使用过程中的故障主要存在于轴向功能上,下面就以轴向功能故障做一个简单地分析并提供一些解决方案,希望能给使用或喜欢使用SINUMERIK 810D系统的同行们带来点思路和帮助,也恳请大家提出珍贵意见。
关键词:数控加工中心;凸轮式机械手;刀库;机床维护;企业效益1 数控加工中心简介与故障描述数控加工中心是由机械设备与数控系统组成的适用于加工复杂零件的自动化机床。
它是一种功能较全的数控加工机床。
它把铣削、镗削、钻削、攻螺纹和切削螺纹等功能集中在一台设备上,使其具有多种工艺手段。
加工中心设置有刀库,刀库中存放着不同数量的各种刀具,在加工过程中由程序自动选用和更换。
由于机床机械手使用频率较高的原因出现故障的概率也大大增加,在机床启动过程中,系统会对机床软硬件进行检测,但是开机后会显示“700048〞,机床报警无法工作。
查阅说明书查阅是机械手伸出故障,重启机床后故障还是没有解除,完全无法正常工作。
2 机床故障分析与处理过程数控加工中心是以凸轮作为驱动机构的凸轮式机械手,它具有结构简单,动作平稳,相位准确、工作节奏快、本钱低等独特优点。
首先尝试进行机械手的手动换刀,输入相关换刀指令后,系统没有反响,换刀失败,系统又再次报警。
机器人设备常见故障的识别与排除

机器人设备常见故障的识别与排除1. 引言随着现代科技的快速发展,机器人设备在工业生产、医疗护理、家庭服务等领域的应用越来越广泛。
然而,正因为机器人设备的复杂性和高度智能化,常常会面临各种故障问题。
本文将从机器人设备常见故障的识别与排除两个方面探讨,帮助读者更好地应对机器人设备故障。
2. 故障的识别2.1 机器人运动异常机器人设备在运动过程中出现异常情况往往意味着可能存在故障。
以下是几种机器人运动异常的故障识别方法:- 手臂运动不稳定:可能是由于电机驱动问题导致的,可以检查电机连接和供电情况。
- 关节卡滞或无法运动:可能是由于关节齿轮磨损或润滑问题导致的,可以尝试清洁和润滑关节部位。
- 运动过程中出现奇怪的声音:可能是由于传动装置损坏或松动导致的,可以检查传动零部件并进行调整或更换。
2.2 传感器异常机器人设备依赖各种传感器来感知环境和执行任务,当传感器发生异常时,会影响机器人正常的工作状态。
以下是几种常见传感器异常的故障识别方法:- 视觉传感器无法识别目标物体:可能是传感器镜头脏了或者被遮挡了,可以尝试清洁镜头或者确认传感器周围没有遮挡物。
- 超声波传感器检测失败:可能是传感器故障或者安装位置不合适导致的,可以检查传感器状态和位置是否正确。
- 接触式传感器无响应:可能是传感器连接问题或者传感器本身故障导致的,可以检查连接线路和更换传感器。
3. 故障的排除3.1 硬件故障排除当机器人设备发生硬件故障时,有几种常见的排除方法:- 检查电源供应:确保机器人设备正常供电,排除电源线路故障。
- 检查电缆和插头连接:检查机器人设备各个部件的电缆和插头连接是否松动或损坏。
- 更换故障部件:对于发现的具体故障部件,可以尝试更换新部件来解决问题。
3.2 软件故障排除机器人设备的软件故障通常需要进行一系列的排除步骤:- 检查程序错误:检查机器人设备的程序是否存在逻辑错误或者语法错误,对错误进行修正。
- 重新安装操作系统:如果机器人设备的操作系统出现问题,可以尝试重新安装操作系统来恢复正常运行。
abb机械手故障原因解决方法
abb机械手故障原因解决方法嘿,咱今儿就来聊聊 ABB 机械手那些事儿!这 ABB 机械手啊,有时候就跟个爱闹脾气的小孩似的,会出现各种故障呢。
你说它为啥会出故障呀?那原因可多了去啦!好比说,可能是长时间工作累着啦,就像咱人一样,累过头了就容易出毛病。
或者是它的某个零部件老化了,就像咱家里用久了的电器,时不时就给你来点小插曲。
再或者是操作不当,被错误地使用了,这能不出问题嘛!那遇到故障咋解决呢?别急呀,咱一个一个来。
要是因为长时间工作累着了,那就让它好好休息休息呗,给它放个假,让它喘口气。
要是零部件老化了,那就得像咱去看医生一样,给它来个精准的诊断,该换零件就换零件呀,可不能含糊。
要是操作不当引起的,那可得好好反思反思,是不是得重新培训一下操作人员,让他们知道该怎么正确地和这机械手打交道呀。
你想想,这 ABB 机械手在工厂里那可是大功臣啊,它能帮咱干好多活呢。
要是它突然闹脾气不干活了,那咱不得着急上火呀!所以呀,咱得像爱护自己的宝贝一样爱护它,平时多给它做做保养,定期检查检查,别等出了问题才想起来它。
就好比一辆汽车,你不好好保养它,它能好好给你跑吗?ABB 机械手也是一样的道理呀!咱可不能偷懒,得对它负责任。
而且呀,解决故障的时候可得细心再细心,不能马马虎虎的。
不然,今天修好明天又坏了,那不是白折腾嘛!咱再说说,要是遇到那种特别棘手的故障咋办呢?这时候可不能慌了神呀,得冷静下来,好好分析分析。
可以找专业的技术人员呀,他们可是这方面的行家呢。
或者去网上找找相关的资料,说不定就能找到解决办法啦。
总之呢,对待 ABB 机械手的故障,咱得有耐心,有细心,还要有决心。
不能怕麻烦,不能嫌累。
你说要是因为一点小故障就把它扔一边不管了,那多可惜呀!它可是能给咱创造价值的呀!所以呀,大家都要重视起来 ABB 机械手的故障问题,别不当回事儿。
只有这样,咱才能让它更好地为咱服务,为咱创造更多的财富呀!难道不是吗?。
机器人设备常见故障排除的十个技巧

机器人设备常见故障排除的十个技巧机器人设备在现代工业生产中扮演着越来越重要的角色,但是在实际运行中难免会遇到各种各样的故障问题。
为了有效提高机器人设备的运行效率和延长使用寿命,掌握一些常见故障的排除技巧显得尤为重要。
在本文中,将分享机器人设备常见故障排除的十个技巧,帮助你快速解决故障问题,保障生产运行的正常进行。
1. 检查电源供应首先要确保机器人设备的电源供应是正常的,检查开关是否打开,插头是否松动,电缆是否断裂等。
有时候故障可能只是来自于电源供应的问题,及时排查可以避免不必要的麻烦。
2. 检查传感器传感器是机器人设备中的关键部件,负责感知周围环境并传达给控制系统。
当机器人出现异常运行时,需要检查传感器是否工作异常,清理传感器周围的灰尘或杂物,确保其正常运行。
3. 检查连接线路机器人设备通常有众多的线路连接,要经常检查连接线路是否松动或损坏,特别是在机器运行中频繁移动的地方。
及时修复线路问题可以有效减少故障发生的可能性。
4. 重启设备有时候机器人设备出现故障可能只是暂时性的问题,通过简单地重启设备可以解决一些无法在系统中找到原因的故障。
重启设备前记得保存好所有的数据,避免造成数据丢失。
5. 清洁设备机器人设备长时间运行后会积累大量的灰尘和杂物,影响设备的正常运行。
定期清洁设备表面和内部部件,特别是机器人关节和传感器等部位,可以有效预防故障的发生。
6. 更新软件机器人设备的软件系统也需要定期更新,以修复已知的BUG和优化系统性能。
确保软件是最新版本,可以提高设备的稳定性和可靠性,减少故障的发生。
7. 检查润滑部件机器人设备的关节和传动部件通常需要定期润滑以减少磨损和摩擦,确保设备的顺畅运行。
检查润滑部件的润滑油是否充足,是否已过期,及时更换和添加润滑油可以延长设备的使用寿命。
8. 校准设备有些机器人设备在长时间运行后可能需要进行重新校准以确保精准度和准确性。
定期校准设备可以避免设备运行的偏差和误差,提高设备的工作效率。
机械手末端不动作的原因
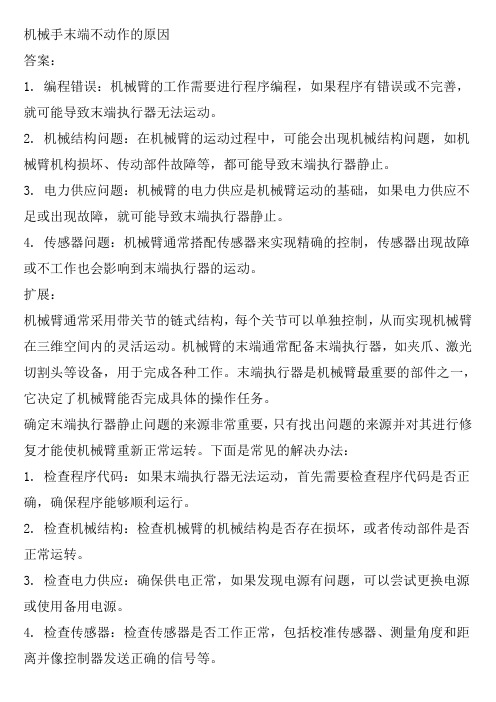
机械手末端不动作的原因答案:1. 编程错误:机械臂的工作需要进行程序编程,如果程序有错误或不完善,就可能导致末端执行器无法运动。
2. 机械结构问题:在机械臂的运动过程中,可能会出现机械结构问题,如机械臂机构损坏、传动部件故障等,都可能导致末端执行器静止。
3. 电力供应问题:机械臂的电力供应是机械臂运动的基础,如果电力供应不足或出现故障,就可能导致末端执行器静止。
4. 传感器问题:机械臂通常搭配传感器来实现精确的控制,传感器出现故障或不工作也会影响到末端执行器的运动。
扩展:机械臂通常采用带关节的链式结构,每个关节可以单独控制,从而实现机械臂在三维空间内的灵活运动。
机械臂的末端通常配备末端执行器,如夹爪、激光切割头等设备,用于完成各种工作。
末端执行器是机械臂最重要的部件之一,它决定了机械臂能否完成具体的操作任务。
确定末端执行器静止问题的来源非常重要,只有找出问题的来源并对其进行修复才能使机械臂重新正常运转。
下面是常见的解决办法:1. 检查程序代码:如果末端执行器无法运动,首先需要检查程序代码是否正确,确保程序能够顺利运行。
2. 检查机械结构:检查机械臂的机械结构是否存在损坏,或者传动部件是否正常运转。
3. 检查电力供应:确保供电正常,如果发现电源有问题,可以尝试更换电源或使用备用电源。
4. 检查传感器:检查传感器是否工作正常,包括校准传感器、测量角度和距离并像控制器发送正确的信号等。
一、机械手没动作的常见原因机械手没动作的原因有很多种,以下是其中的几种常见原因。
1、机械手本身故障。
机械手本身出现故障是导致机械手没动作的主要原因之一。
比如,伺服电机损坏、减速器损坏、传动皮带断裂等。
2、传感器故障。
机械手上的传感器出现故障也会导致机械手没动作。
比如,位置传感器损坏、压力传感器失效等。
3、程序错误。
另外,机械手的程序出现错误也会导致机械手没动作。
比如,编程错误、程序崩溃等。
二、机械手没动作的解决方法针对不同的原因,机械手没动作的解决方法也不同。
刀库、机械手常见故障及排除方法表4—11

调节锁刀弹簧上的螺钉,使其最大载荷不超过额定值
6
刀具从机械手中脱落
机械手卡紧销损坏或没有弹出来
更换卡紧销或弹簧
6
刀具从机械手中脱落
换刀时主轴箱没有回到换刀点或换刀点发生漂移
重新操作主轴箱运动,使其回到换刀点位置,并重新设定换刀点
机械手抓刀时没有到位,就开始拔刀
调整机械手手臂,使手臂爪抓紧刀柄后再拔刀
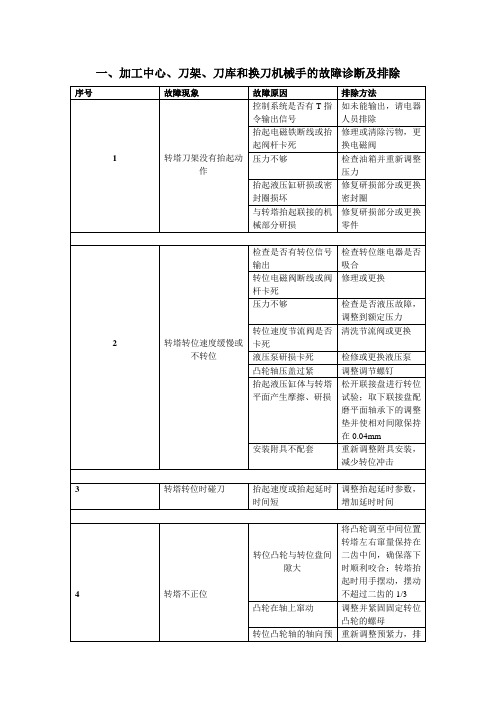
表4—11刀库、机械手常见故障及排除方法
序号
故障现象
故障原因
排除方法
1
刀库不能旋转
联接电动机轴与蜗杆轴的联轴器松动
紧固联轴器上的螺钉
刀具重量超重
刀具重量不得超过规定值
2
刀套不能夹紧刀具
刀套上的调整螺钉松动或弹簧太松,造成卡紧力不足
顺时针旋转刀套两端的调节螺母,压紧弹簧,顶紧卡紧销
刀具超重
刀具重量不得超过规定值
3
刀套上不到位
装置调整不当或加工误差过大而造成拨叉位置不正确
调整好装置,提高加工精度
限位开关安装不正确或调整不当造成反馈信号错误
重新调整安装限位开关
4
刀具不能夹紧
气压不足
调整气压在额定范围内
增压漏气
关紧增压
刀具卡紧液压缸漏油
更换密封装置,卡紧液压缸不漏
刀具松卡弹簧上的螺母松动
旋紧螺母
5
刀具夹紧后不能松开
刀具重量超重
刀具重量不得超过规定值ห้องสมุดไป่ตู้
7
机械手换刀速度过快或过慢
气压太高或节流闪阀开口过大
保证气泵的压力和流量,旋转节流阀到换刀速度合适
加工中心、刀架、刀库和换刀机械手的故障诊断及排除
一、加工中心、刀架、刀库和换刀机械手的故障诊断及排除加工中心ATC 斗笠式刀库动作过程故障分析摘要:加工中心可将铣、镗、钻、铰、攻螺纹等多项功能集于一身,大大提高了生产效率。
换刀装置(ATC)是加工中心的重要组成部分,也是加工中心故障率最高的部分,约有50%的机床故障与换刀装置有关。
斗笠式刀库是加工中心比较常见的一种换刀装置,在本文中,我结合自己的工作经验,对斗笠式刀库的动作过程及换刀过程中容易出现的故障进行了简要的分析和说明。
关键词:加工中心ATC 斗笠式刀库动作过程故障分析0 引言加工中心的一个很大优势在于它有ATC装置,使加工变得更具有柔性化。
加工中心常用的刀库有斗笠式、凸轮式、链条式等,其中斗笠式刀库由于其形状像个大斗笠而得名,一般存储刀具数量不能太多,10~24把刀具为宜,具有体积小、安装方便等特点,在立式加工中心中应用较多。
1 斗笠式刀库的动作过程斗笠式刀库在换刀时整个刀库向主轴平行移动,首先,取下主轴上原有刀具,当主轴上的刀具进入刀库的卡槽时,主轴向上移动脱离刀具;其次主轴安装新刀具,这时刀库转动,当目标刀具对正主轴正下方时,主轴下移,使刀具进入主轴锥孔内,刀具夹紧后,刀库退回原来的位置,换刀结束。
刀库具体动作过程如下:1.1 刀库处于正常状态,此时刀库停留在远离主轴中心的位置。
此位置一般安装有信号传感器(为了方便理解,定义为A),传感器A发送信号输送到数控机床的PLC中,对刀库状态进行确认。
1.2 数控系统对指令的目标刀具号和当前主轴的刀具号进行分析。
如果目标刀具号和当前主轴刀具号一致,直接发出换刀完成信号。
如果目标刀具号和当前主轴刀具号不一致,启动换刀程序,进入下一步。
1.3 主轴沿Z方向移动到安全位置。
一般安全位置定义为Z轴的第一参考点位置,同时主轴完成定位动作,并保持定位状态;主轴定位常常通过检测主轴所带的位置编码器一转信号来完成。
1.4 刀库平行向主轴位置移动。
刀库刀具中心和主轴中心线在一条直线上时为换刀位置,位置到达通过信号传感器(B)反馈信号到数控系统PLC进行确认。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械手故障排除法
一、故障排除
1.1警报故障码说明:
(1)E01: 原点信号故障!
(2)E02: 终点信号故障!
(3)E03: 副臂上位信号故障!
(4)E04: 正臂上位信号故障!
(5)E06:正臂成品确认信号故障!
(6)E07:副臂夹具信号故障!
(7)E08:空气压力不足!
(8)E12:正臂侧姿信号故障!
(9)E13:正臂回正信号故障!
(10)E14:置料安全信号故障!
(11)E18:正臂前进信号故障!
(12)E20:副臂前进信号故障1
(13)E20:副臂后退信号故障!
(14)E24:正臂侧姿电磁阀故障!
(15)E25:副臂下行电磁阀故障!
(16)E26:副臂前进电磁阀故障!
(17)E27:变频器故障!
(18)E32:原点与终点信号同时ON!
(19)E36:置物安全信号已亮!
(20)E37:中板信号故障!
(21)E80:已达设定模数!
(22)E92:开模完信号故障!
1.2 警告码说明
(1)W01:模侧姿
(2)W02:手臂下行时横出入
(3)W04:模式未设定
(4)W05:成品臂未依模式动作
(5)W06:料头臂未依模式动作
(6)W10:未归原点
(7)W11:未归终点
1.3 警报故障排除流程图: 1.3.1 E01:原点信号故障
1.3.2 E02:终点信号故障
1.3.3 E03:副臂上位信号故障
1.3.4 E04:正臂上位信号故障
1.3.5 E06: 正臂成品信号故障
注意:真空产生器V端(吸气口)必须定期(3~4周)做保养清洗以防吸力不足或检测成吕不正确的情形
1.3.6 E07:副臂夹具信号故障
1.3.7 E08:空气压力不足
1.4.8 E12:正臂侧姿信号故障
4.3.9 E13: 正臂回正信号故障
1.4.10 E14: 置料安全信号故障
4.3.11 E18:正臂后退故障
4.3.12 E20: 副臂后退信号故障
1.3.13 E22:正臂下故障
1.3.13 E23: 正臂进故障
1.3.15 E24: 正臂侧姿故障
1.3.16 E25: 副臂下故障
1.3.18 E27 变频器故障
1.3.19 E32: 原/终点信号同时亮
1.3.20 E36: 置物安全信号已亮
1.3.21: 中板信号故障
当射出机开模完后8秒内,若中板信号故障,则出现E37。
1.3.22 E92: 开模完信号消失。