电焊机自动控制系统的设计与实现
智能焊接云管理系统开发及应用
智能焊接云管理系统开发及应用刘金龙,柳振国,李江,闫伟男,马晓健(唐山松下产业机器有限公司,河北唐山063000)摘要:智能焊接云管理系统iWeldCloud 是通过焊接设备的物联网连接,它将设备、人员、材料、工艺等数据整合到一个平台来进行管理,为焊接行业用户提供数据管理服务及远程设备运维服务,其应用对管控焊接质量、提升焊接效率具有明显的改善作用。
通过设备智能化、管理智能化、服务智能化三个方面的技术开发及应用,分别从焊接设备使用企业与焊接设备制造企业两个角度阐述了工业互联网技术与传统焊接产业结合应用的先进思想与应用示范。
关键词:互联网平台;远程服务;焊接工艺;效率提升中图分类号:TG408文献标志码:B 文章编号:1001-2303(2020)02-0045-04DOI :10.7512/j.issn.1001-2303.2020.02.09本文参考文献引用格式:刘金龙,柳振国,李江,等.智能焊接云管理系统开发及应用[J].电焊机,2020,50(2):45-48.收稿日期:2019-12-29作者简介:刘金龙(1985—),男,硕士,主要从事工业互联网技术在焊接设备及工厂的应用。
E-mail :liujinlong@ 。
0前言工业互联网被认为是人类的第三次技术浪潮,它通过机器、设备的网络互联,结合软件与大数据分析技术来激发生产力,创造新价值。
唐山松下产业机器有限公司(以下简称松下)面向焊接制造行业推出了一套具有行业特点的工业互联网平台———智能焊接云管理系统,简称iWeldCloud ,它通过焊接设备的物联网连接,基于云平台为用户提供一种数字化管理工具,将焊接设备、人员、材料、工艺等数据整合到一个平台来进行管理,为用户提供设备监控、设备管理、工艺管理、生产管理等多方面的数据管理服务,更为重要的是,通过焊接设备将用户与公司紧密连接到一个平台,公司能精准地为客户提供工艺指导、软件更新、故障诊断等扩展性服务。
通用自动点焊机平台设计
15 15 18 20 23 23 23
上海工程技术大学毕业设计(论文)
通用自动点焊机平台设计
2.5.2 滚珠丝杠导程计算........................................................................... 2.5.3 滚珠丝杠的选型............................................................................... 2.6 线性模组的校核................................................................................... 2.6.1 滚珠丝杠扭转强度的校核............................................................... 2.6.2 滚珠丝杠的预期额定动载荷校核.................................................. 2.6.3 联轴器的校核................................................................................... 2.6.4 导轨滑块的校核............................................................................... 2.6.5 线性模组的负载校核....................................................................... 3 通用自动点焊机平台驱动部件设计...................................................... 3.1 驱动形式的选择................................................................................... 3.2 分析选型............................................................................................... 3.3 伺服电机的选型计算........................................................................... 3.3.1 机械系统的参数............................................................................... 3.3.2 动作模式的参数............................................................................... 3.3.3 电机轴负载惯量计算....................................................................... 3.3.4 负载转矩计算................................................................................... 3.4 初选伺服电机....................................................................................... 3.5 校核伺服电机....................................................................................... 3.5.1 校核电机惯量................................................................................... 3.5.2 校核电机转矩................................................................................... 3.5.3 校核电机转速...................................................................................
浅析炼化装置自动控制系统中仪表的抗干扰措施

浅析炼化装置自动控制系统中仪表的抗干扰措施发布时间:2022-01-11T07:24:37.668Z 来源:《建筑学研究前沿》2021年18期作者:韩升晖[导读] 炼化装置的生产过程与自动控制系统中仪表的精确度有着紧密联系,仪表专业工作人员要对不同的干扰源来源进行充分的分析,根据仪表的实际情况来采取相应的抗干扰措施进行处理,这样才可以确保自动化仪表能够正常运行。
中核第四研究设计工程有限公司河北省石家庄市 050000摘要:炼化装置的生产过程与自动控制系统中仪表的精确度有着紧密联系,仪表专业工作人员要对不同的干扰源来源进行充分的分析,根据仪表的实际情况来采取相应的抗干扰措施进行处理,这样才可以确保自动化仪表能够正常运行。
另外,仪表专业工作人员也要对先进的技术和设备进行不断学习和了解,在提高仪表精确度的同时,还要对炼化装置仪表进行养护。
关键词:炼化装置;自动控制系统;仪表;抗干扰措施引言在我国炼油化工行业实际生产过程中不可缺少的检测设备就是生产装置中仪表,自动控制系统中的仪表是炼油化工生产装置的眼睛,监测着化工生产过程的每个动态,对整个炼油化工生产系统的正常运转有着非常重要的影响。
不过炼化装置自动控制系统中仪表容易受到外部干扰源的干扰,从而导致仪表检测结果存在很大的误差,测量结果与生产装置现场实际不符,这样就会对整个炼化装置的生产工作带来影响,所以,自动控制系统仪表专业相关管理人员要对干扰来源进行准确判断,并且及时采取抗干扰措施来进行应对,这样才可以提高炼化装置自动控制系统中仪表检测结果的准确性。
1炼化装置自动控制系统中仪表的干扰来源分析 1.1外部干扰所谓的外部干扰,简单的来说就是指各种电信号或系统信号之间发生串入或者叠加,这种外部干扰会对炼化装置仪表的测量准确性带来很大程度的影响。
其中主要包括了工频干扰、射频干扰、感应干扰等类型。
工频干扰主要指的是大功率工频电线电缆或是电源变压器,发电机可以与该类设备相连的电源线等,干扰到低频信号;射频干扰主要指的是电焊机弧光、断开电气装置接点时产生的火花、功率较大的高频发射装置等都会形成较大的高频电磁波,通过空间辐射的形式往周围扩散,并传播至弱网络中导致电气干扰的情况出现;感应干扰主要指的是有交变磁场存在于交流强电设备或导线周边,一旦有弱电信号经过,就会通过电磁感应的方式耦合到有用信号电路中。
电焊机机械手编程教程自学
电焊机机械手编程教程自学近年来,随着工业自动化的快速发展,电焊机机械手在焊接行业中的应用越来越广泛。
电焊机机械手的编程是实现其自动化运行的关键。
本文将介绍电焊机机械手编程的基本原理和步骤,帮助读者能够自学掌握这一技能。
在开始学习电焊机机械手编程之前,首先需要了解电焊机机械手的基本构成和工作原理。
电焊机机械手由机械臂和控制系统两部分组成。
机械臂是用来实现焊接操作的工具,而控制系统则负责控制机械臂的运动和焊接参数的设定。
了解这些基本知识能够帮助我们更好地理解编程的过程。
编程是指通过对控制系统进行设置,使机械手能够按照预先设定的路径和参数进行工作。
具体而言,电焊机机械手编程包括以下几个步骤。
需要进行焊接路径的规划。
焊接路径是指焊接点之间的移动路径。
在规划焊接路径时,需要考虑到焊接点的位置、焊缝的形状和长度等因素。
一般来说,焊接路径应该尽可能简洁,以节省时间和能源。
需要设定焊接参数。
焊接参数包括焊接电流、焊接电压、焊接速度等。
这些参数的设定直接影响到焊接质量和效率。
在设定焊接参数时,需要根据具体的焊接材料和焊接要求进行调整。
然后,需要编写焊接程序。
焊接程序是指根据焊接路径和参数,将机械手的运动和焊接操作进行编码。
编写焊接程序需要使用特定的编程语言,如KRL、RAPID等。
这些编程语言具有一定的复杂性,需要花费一定的时间和精力进行学习和掌握。
在编写焊接程序之后,需要进行程序的调试和优化。
调试是指通过对编写的焊接程序进行测试和检查,发现和修复程序中的错误和问题。
优化是指对程序进行改进,以提高焊接效果和效率。
调试和优化是一个迭代的过程,需要不断地进行测试和修改,直到达到预期的效果。
需要进行机械手的运行和监控。
在运行过程中,需要对机械手的运动和焊接过程进行监控和控制,及时发现和处理异常情况。
同时,还需要对焊接质量进行检查和评估,以确保焊接结果符合要求。
通过自学电焊机机械手编程,可以使我们更好地掌握焊接技术,提高工作效率和质量。
加热炉温度串级控制系统设计

加热炉温度串级控制系统设计摘要:温度控制系统广泛应用于工业控制领域,如钢铁厂、化工厂、火电厂等锅炉的温度控制系统,电焊机的温度控制系统等。
加热炉温度控制在许多领域中得到广泛的应用。
生产自动控制过程中 ,随着工艺要求 ,安全、经济生产不断提高的情况下 ,简单、常规的控制已不能适应现代化生产。
传统的单回路控制系统很难使系统完全抗干扰。
串级控制系统具备较好的抗干扰能力、快速性、适应性和控制质量,因此在复杂的过程控制工业中得到了广泛的应用.对串级控制系统的特点和主副回路设计进行了详述,设计了加热炉串级控制系统,并将基于MATLAB的增量式PID算法应用在控制系统中。
结合基于计算机控制的PID参数整定方法实现串级控制,控制结果表明系统具有优良的控制精度和稳定性。
关键词:干扰串级控制主回路副回路Abstract:Automatic control of production process, with the technical requirements, security, economic production rising cases, simple, conventional control can not meet the modern production. The traditional single-loop control system is difficult to make the system completely anti-interference. Cascade control system with good anti-jamming capability, rapidity, flexibility and quality control, and therefore a complex process control industry has been widely used. Cascade control system of the characteristics and the main and sub-loop design was elaborate, designed cascade control system, furnace, and MATLAB-based incremental PID algorithm is applied in the control system. Combination of computer-based control method to achieve PID parameter tuning cascade control, control results show that the system has excellent control accuracy and stabilityKeywords:Cascade control, interference, the main circuit, the Deputy loop目录1.前言 (2)2、整体方案设计 (3)2.1方案比较 (3)2.2方案论证 (6)2.3方案选择 (7)3、串级控制系统的特点 (8)4. 温度控制系统的分析与设计 (9)4.1控制对象的特性 (9)4.2主回路的设计 (10)4.3副回路的选择 (10)4.4主、副调节器规律的选择 (10)4.5主、副调节器正反作用方式的确定 (10)5、控制器参数的工程整定 (12)6 、MATLAB系统仿真 (13)6.1系统仿真图 (13)6.2副回路的整定 (15)6.3主回路的整定 (16)7.设计总结 (18)【参考文献】 (19)11.前言随着我国国民经济的快速发展,加热炉的使用范围越来越广泛。
(焊机)群控控制系统——焊接事务管理与控制之新篇章
(焊机)群控控制系统——焊接事务管理与控制之新篇章文/制造事业部吴守齐焊接技术是压力容器产品制造的核心,焊接质量的提高、效率的提升以及可追溯性的提升均成为管理者的首要任务,然而,传统的焊接管理方式仅靠管理人员的巡查来控制焊接规范的执行,这种方式存在滞后、失真等诸多局限性,导致工艺的可执行性、可指导性受到极大的阻碍。
近些年来,(焊机)群控系统在机械制造行业颇受青睐,其对焊接工艺的可执行性、焊接实施曲线的可分析性、焊接质量的可追溯性、焊接效率的可分析性、焊接成本控制的精确性等均彻底的颠覆了传统的管理模式。
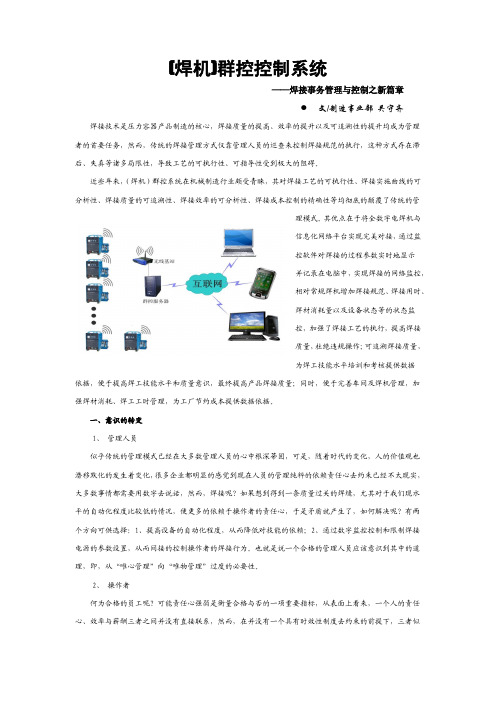
其优点在于将全数字电焊机与信息化网络平台实现完美对接,通过监控软件对焊接的过程参数实时地显示并记录在电脑中,实现焊接的网络监控,相对常规焊机增加焊接规范、焊接用时、焊材消耗量以及设备状态等的状态监控,加强了焊接工艺的执行,提高焊接质量,杜绝违规操作;可追溯焊接质量,为焊工技能水平培训和考核提供数据依据,便于提高焊工技能水平和质量意识,最终提高产品焊接质量;同时,便于完善车间及焊机管理,加强焊材消耗、焊工工时管理,为工厂节约成本提供数据依据。
一、意识的转变1、管理人员似乎传统的管理模式已经在大多数管理人员的心中根深蒂固,可是,随着时代的变化,人的价值观也潜移默化的发生着变化,很多企业都明显的感觉到现在人员的管理纯粹的依赖责任心去约束已经不太现实,大多数事情都需要用数字去说话,然而,焊接呢?如果想到得到一条质量过关的焊缝,尤其对于我们现水平的自动化程度比较低的情况,便更多的依赖于操作者的责任心,于是矛盾就产生了,如何解决呢?有两个方向可供选择:1、提高设备的自动化程度,从而降低对技能的依赖;2、通过数字监控控制和限制焊接电源的参数设置,从而间接的控制操作者的焊接行为。
也就是说一个合格的管理人员应该意识到其中的道理,即,从“唯心管理”向“唯物管理”过度的必要性。
2、操作者何为合格的员工呢?可能责任心强弱是衡量合格与否的一项重要指标,从表面上看来,一个人的责任心、效率与薪酬三者之间并没有直接联系,然而,在并没有一个具有时效性制度去约束的前提下,三者似乎又存在一些微妙的比例关系,于是矛盾又产生了,又如何解决呢?为了负责而牺牲利益?为了利益而牺牲责任?从一个管理人员的角度看来这个问题很容易回答,很自然的会选择前者,然而,每个员工作为一个自然的个体,面临这个问题似乎就很难抉择。
自动控制系统施工方案
自动控制系统施工方案第五节、自动控制系统施工方案一、施工准备1.材料钢管、接线盒、桥架、通讯及控制线缆应符合设计要求,产品应附有材质检验报告、合格证等。
2.现场控制器。
温度、湿度、压力、压差等各类传感器。
电动阀、电磁阀等执行器。
网络控制器、计算机、不间断电源、打印机等。
控制台、控制器箱等。
3.机具设备施工机具:电钻、手提砂轮、电焊机、电锤。
测量器具:水平尺、钢卷尺、钢直尺、万用表、摇表、游标卡尺、精度仪。
调试仪器:楼宇自控系统专用调试仪器。
4.作业条件线槽、预埋管路、接线盒、预留孔洞的规格、数量、位置符合规范与设计要求。
中央控制室内土建装修完毕,温、湿度到达使用要求。
楼宇自控系统的受控设备及其自身的系统安装、调试完毕、合格;同时其设备或系统的测试数据必须满足自身系统的工艺要求,具备相应的测试记录。
检测楼宇自控系统设备与各联动系统设备的数据传输符合设计要求。
确认按设计图纸、产品供应商的技术资料、软件和规定的其他功能和联锁、联动程序控制的要求。
5.调试程序(1)现场控制器测试•数字量输入测试信号电平的检部查:按设备说明书和设计要求确认干接点输入、电压和电流等信号是否符合要求。
动作试验:按上述不同信号的要求,用程序方式或手动方式对全部测点进行测试,并将测点之值记录下来。
•数字量输出测试:信号电平的检查:按设备说明书和设计要求确认继电器开关量的输出起/停(ON/OFF)、输出电压或电流开关特性是否符合要求。
动作试验:用程序方式或手动方式测试全部数字量输出,并记录其测试数值和观察受控设备的电气控制开关工作状态是否正常;如果受控单体受电试运行正常,那么可以在受控设备正常受电情况下观察其受控设备运行是否正常。
•模拟量输入测试:按设备说明书和设计要求确认其有源或无源的模拟量输入的类型、量程(容量)、设定值(设计值)是否符合规定。
•模拟量输出测试:按设备使用说明书和设计要求确定其模拟量输出的类型、量程(容量)与设定值(设计值)是否符合。
基于PID的闪光对焊机控制系统设计
能 化焊 接机 器人 的研究 提供 实践载体 。
参 考 文献 : [1] 魏 明 ,胡 建 平 ,江 强 .06Ni9钢 埋 弧 自动 横 焊技 术 探 讨 [J].
石 油 工程 建 设 ,2013(1):42—45. [2] 赵 立 春 .横 向埋 弧 焊 在 塔 器 现 场 组 焊 的应 用 [J].安 装 ,2009(6):
光 对 焊 原理 、PID增 量 式 控 制 算 法 和 基 于 P1D 的 闪光 对 焊 控 制 系统设 计 等三 个 方面 进 行 了介 绍
关 键 词 :PID; 闪光 对 焊 ;控 制 系统 ;设 计
中 图 分 类 号 :TG438.2
文 献 标 志码 :B
0 引 言 闪光 对焊 是 电阻 焊 的一种 ,属 于 压力 焊 的范 畴 .
ti。electrode submerged arc welding in the production of high-
strength thick—walled pipes[J1.METALLURGIST,2013,57(3/4):
31O一319.
[9] 杨 建 强 .储 罐倒 装施 工 内外 横 缝 两 用 埋 弧 自动 横 焊 机 的设 计 及 焊 接 工 艺 [J].电焊 机 ,2011(10):71—72.
sensors[J].Journal Tsinghua University,2003,43(5):597—600. [7] Zhang Xiaoming,Wang Gang and Feng Lina.Horizontal Submerged
Arc Welding Equipment Based on the Torch Swinging Design[J]. Advanced Materials Research,2012(429): lOl一1【)4. [8] Bortsov A N,Shabalov I P,Velichko A A,et a1.Features of mul,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
•
系统设置有2种工作方式:手动控制方式、自动运行
方式。选择好工作方式开后按下对应开关工作台就能
在指定方式下运行。工作台在最左边时为系统原点状
态,也称初始状态,把圆锯片从初始位置移动到焊接结束 并返回原点的过程为点焊机的一个工作周期。
•
对工作台工作循环的要求:手动控制方式:要求对工
作台的上升、下降、左行、右行、旋转等各动作执行
手动操作。自动运行方式:按下按钮后,要求自动完成一
个工作周期或者连续工作。
工作台示意图及工作流程图
控制流程图
工作方框图
设计要求
•
点焊机自动控制系统需要工作台自动进行直线运
动和旋转运动,以此来使焊点到达所需位置,其工作
台的运动主要为以下三个:
• (1)工作台水平直线运动。
• (2)工作台旋转动作。
• (3)工作台升降运动
•
工作台采用两相混合式步进电机驱动,由PLC发出
控制脉冲控制步进驱动器进而带动步进电动机的进退
和旋转,由电磁阀控制汽缸的上升和下降,实现工作
台的进给和定位。
• 感谢各位老师