扫地机器人电路原理图 IN
扫地机器人简介演示

破,如办公室、酒店、餐厅等场景的清洁工作。
03
特殊环境应用
针对特殊环境如无尘车间、实验室等,扫地机器人可以通过定制化设计
,满足更高标准的清洁需求。
THANKS
感谢观看
家具底部清洁
扫地机器人通常配备有低矮的身材设计,能够轻松进入家具底部进 行清扫,解决了传统清扫工具难以触及的难题。
定时预约
扫地机器人支持定时预约功能,用户可根据自己的需求设置清扫时 间,方便实用。
办公环境中的应用
大面积清扫
办公环境中往往需要清扫大面积的地面,扫地机器人具备高效的 清扫能力,能够快速完成清扫任务。
APP远程控制
用户可通过手机APP远程 操控扫地机器人,设置清 扫模式、定时任务等,实 现智能家居生活。
03
扫地机器人类型与特点
随机式扫地机器人
基础清洁功能
随机式扫地机器人具备基础的地 面清洁功能,能够随机覆盖房间
区域进行清扫。
无规划能力
该类机器人没有先进的路径规划 算法,因此清扫路径较为随机,
扫地机器人简介演示
汇报人: 日期:
contents
目录
• 扫地机器人概述 • 扫地机器人技术原理 • 扫地机器人类型与特点 • 扫地机器人的应用场景与优势 • 扫地机器人的发展趋势与挑战 • 总结与展望
01
扫地机器人概述
扫地机器人定义
自动化清洁设备
扫地机器人是一种使用先进的人工智能技术和机器人技术,能自动或者手动控 制进行室内地面清洁的自动化设备。
消费者认知与接受度的提高
市场推广
通过广告、社交媒体等渠道进行市场推广,提高消费者对扫地机器 人的认知度。
用户口碑传播
借助用户口碑传播,让更多人了解扫地机器人的实际使用效果。
瓦力智能工业机器人(山洋)电气原理图明
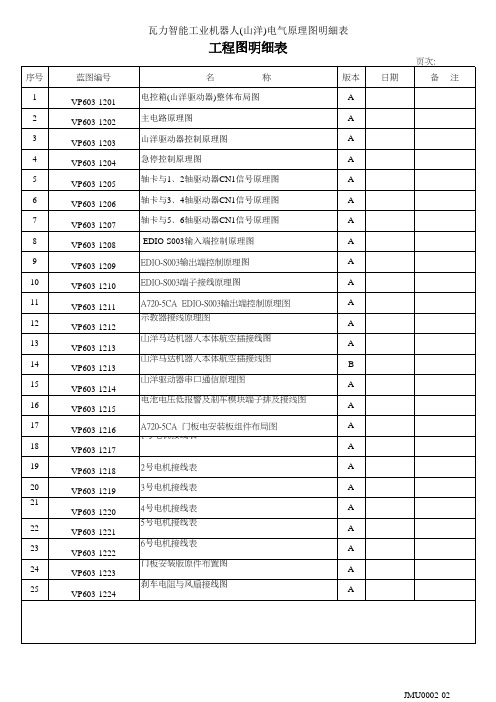
Hale Waihona Puke 工程图明细表页次: 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 VP603-1220 22 23 24 25 VP603-1221 6号电机接线表 VP603-1222 门板安装版原件布置图 VP603-1223 刹车电阻与风扇接线图 VP603-1224 蓝图编号 VP603-1201 VP603-1202 VP603-1203 VP603-1204 VP603-1205 VP603-1206 VP603-1207 VP603-1208 VP603-1209 VP603-1210 VP603-1211 VP603-1212 山洋马达机器人本体航空插接线图 VP603-1213 山洋马达机器人本体航空插接线图 VP603-1213 山洋驱动器串口通信原理图 VP603-1214 电池电压低报警及刹车模块端子排及接线图 VP603-1215 VP603-1216 VP603-1217 VP603-1218 VP603-1219 2号电机接线表 3号电机接线表 4号电机接线表 5号电机接线表 A720-5CA 门板电安装板组件布局图 1号电机接线表 名 电控箱(山洋驱动器)整体布局图 主电路原理图 山洋驱动器控制原理图 急停控制原理图 轴卡与1﹑2轴驱动器CN1信号原理图 轴卡与3﹑4轴驱动器CN1信号原理图 轴卡与5﹑6轴驱动器CN1信号原理图 EDIO-S003输入端控制原理图 EDIO-S003输出端控制原理图 EDIO-S003端子接线原理图 A720-5CA EDIO-S003输出端控制原理图 示教器接线原理图 称 版本 A A A A A A A A A A A A A B A A A A A A A A A A A 日期 备 注
单片机自动清洁机器人设计(电路图+原理图+流程图+源程序)课程设计
单片机自动清洁机器人设计(电路图+原理图+流程图+源程序)-课程设计单片机自动清洁机器人设计最近在电视看到一款能够遥控移动的吸尘器,圆形的和遥控汽车差不多,我感觉到如果再不把自己的想法写出来,自己的创意会被很多人实现,我几年前就想设计一款能够打扫卫生的机器人,直到看到电视里的那个东西,我意识到,我要自己做一个出来。
移动机构是清洁机器人的主体,决定了清洁机器人的运动空间,一般采用轮式结构。
传感器系统一般采用超声波传感器、红外光电传感器、接触传感器等构成多传感器系统。
随着近年来控制技术、传感技术以及移动机器人技术等技术的迅速发展,智能清洁机器人控制系统的研究和开发已具备了坚实的基础和良好的发展前景。
吸尘系统在原理上与传统立式吸尘器相同,主要是在结构设计上更多考虑结构尺寸、集成度以及一些辅助机构的合理布置和利用,以此来提高能源利用率和工作效率。
现在的智能清洁机器人通过软硬件的合理设计,使其能够自动避开障碍物,实现一般家居环境下的自主清洁工作。
它的主要功能有: 1 能够自动熟悉地形,了解房间布局,感知自己的方位,记录和分析环境卫生状况,容易脏的地方多打扫,干净的地方少打扫,节省能源。
2能够自动补充能量。
当检测到电源不足时,自动找到电源,并充电。
充电结束自动专为待机状态。
3当垃圾装满后自动打包,并将垃圾放到主人指定的地点。
4能够检测主人是否在家,只有当主人不在家时,才出来打扫卫生,主人在家时机器人休息。
保证不影响主人的正常生活。
可行性分析:1应用超声波测距和滚轮定位就可以测到自己的位置,给据吸入垃圾量的多少,就可以分析出,那干净那里脏.2应用简单的空中加油技术就可以把自动充电搞定。
检测电源能量多少,和是否充满就更简单了.3垃圾打包只用简单的打包技术就可以解决.4机器人上装上热释红外探测器就知道主人在不在了..5剩下的功能,好多玩具里都有,只要把吸尘器和遥控车结合起来就搞定了1 系统整体方案设计1.1 制作清洁机器人的任务与要求:任务: 清洁机器人在场地上任意运动并吸尘,当遇到障碍物时,可自主避开障碍物绕道继续运动(轨迹由团队设定)。
机器人电路图
Latest revision:
Lab/Office:
Table of contents: Prepared by, date: CNSHLIN8 Approved by, date:
= Plant: Location: + Sublocation:+ Document no. Rev. Ind Page 3 Next 4 3HAC049406-003 02 Total 52 Status: Approved
1
2
3
4
5
6
7
8
Table of contents
Plant Location Page Page description 31 ANALOGUE I/O UNIT DSQC355B 32 ENCODER UNIT DSQC377 33 CC-LINK 34 VISION, INTEGRATED CAMERAS 35 ETHERNET SWITCH A64/CAMERA 36 AXIS COMPUTER UNIT 37 AXIS COMPUTER UNIT 38 RECTIFIER AND BLEEDER 39 FAN UNIT 40 REMOTE SERVICE BOX DSQC680 41 SERVO DRIVE SYSTEM IRB 120 42 CONTROL CABLE 43 SERVO DRIVE SYSTEM IRB 140 44 CONTROL CABLE IRB 140 45 SERVO DRIVE SYSTEM IRB 360 46 47 48 49 50 CONTROL CABLE IRB 360 SERVO DRIVE SYSTEM IRB 1200 CONTROL CABLE IRB 1200 SERVO DRIVE SYSTEM IRB 1410, 1600, 260 CONTROL CABLE IRB 1410, 1600, 260 Page supplementary field Date 3/31/2016 3/31/2016 3/31/2016 3/31/2016 3/31/2016
扫地机智能控制系统设计

采用2行16个字的DM-162液晶 模块,通过与单片机连接,编 程,完成显示时间及清扫机行
进速度的功能。
3.1 传感器系统
内传感器系统
主要用于采集系统自身状态的信息,比如速度、加速度、轨迹、位置等。这类传感器 主要有测速发电机、加速度计、编码器、陀螺仪、电子罗盘等。
外传感器系统
外传感器负责采集系统外部环境信息,比如图像、距离、受力等。这类传感器包括 CCD视觉传感器、超声波传感器、红外传感器、力传感器等。
移动,扫地机驱动器中最根本的问题就是控制电机, 压脉冲序列并通过控制电压脉冲宽度或周期以达到变压
控制电机转的圈数就可以控制扫地机移动的距离和 方向、清扫机械的弯曲的程度或者移动的距离等。
的目的。
一般有专门的控制卡和控制芯片来进行控制。有了
这些控制卡和芯片,然后把微控制器与其连接起来
就可以用程序来控制电机。
Part Two
采用单片微机控制器
单片微控器
本设计以AT89C51单 片机作为检测和控制核
心。是美国ATMEL公司 生产的低电压,高性能
CMOS 8位单片机。兼容 标准MCS-51指令系统,
片内置通用8位中央处理 器(CPU)和Flash存储 单元。
AT89C51 主要性能参数
1.与MCS-51产品指令系统完全兼容 2.有4K字节可重擦写Flash闪速存储器 3.有1000次的擦写周期 4.全静态操作:0Hz~24MHz 5.有128×8字节的内部RAM 6.有32个可编程I/O 口 7.有2个16位定时/计数器 8.有6个中断源 9.低功率空闲和掉电模式
4.2 驱动系统电路
驱动系统电路
驱动系统电路包括驱动器、光电隔离模块以及驱动器保护电路等部分。在具体电路中,由于单片 机使用5V弱电,而电机的驱动电压为12V或者更高,考虑到单片机会受到驱动部分的干扰,因此采用了 光电耦合器TLP521,把控制部分和驱动部分隔离开来。单片机输出端口的电流一般只有20mA左右,不 足以或者不能稳定地驱动光电耦合器TLP521工作,因此采用芯片74HC245来增强驱动能力,为光电耦合 器TLP521提供合适的驱动电流。驱动器保护电路由8个高速大电流肖恩特二极管1N5822(图中D1~D8) 组成,用来消除电机在起停、制动及换向时产生的反电势。
基于51单片机的“扫地机器人”设计报告

第十二届智能控制设计大赛初级组之基于51单片机的“扫地机器人”设计报告目录一、设计要求 ........................................................................................ 错误!未定义书签。
1.基本要求:.......................................................................................... 错误!未定义书签。
2.拓展要求:.......................................................................................... 错误!未定义书签。
二、设计思路 ........................................................................................ 错误!未定义书签。
三、方案比较 (3)1、洞洞板的选择 (3)2、芯片的选择 (3)3、单片机键盘的选择 (3)4、LCD的选择...................................................................................... 错误!未定义书签。
5、电源的选择....................................................................................... 错误!未定义书签。
6、储存模块的选择 (4)7、时钟模块的选择 (4)8、最终选用方案 (4)四、一些模块的选择及底盘制作 ........................................................... 错误!未定义书签。
基于单片机的智能扫地机-电路系统设计及装配与调试
基于单片机的智能扫地机-电路系统设计及装配与调试摘要如今,机器越来越智能,随着智能化时代到来,智能机器也给人民带来诸多便利。
家庭智能机器更是应用最广的地方,而智能扫地便能够给人们带来极大的方便,不仅能够给人类带来舒适干净的环境,还能推动社会智能化的发展。
本文主要设计一个简单的智能扫地机。
该扫地机的核心控制元器件是stc89c52,具有编写程序简单,成本普遍较低,功能较多,效率特别高等优点,因此在市场上得到很大的应用。
除此之外,该扫地机能够自动避开障碍物、自动利用风机进行吸尘功能。
该文介绍了扫地机系统的整体制作过程,它主要由单片机主控电路、单片机最小系统电路、红外光电避障电路、按键启动停止电路以及电机驱动电路组成。
通过利用Altium Designer集成电路设计软件,进行原理图以及电路板的设计。
其次通过KEIL编程软件为单片机输送程序,来控制整个扫地机的逻辑。
关键字:智能吸尘机;壁障;stc89c52单片机;L298NIntelligent Sweeper Based On MCU-Circuit system design, assembly and debuggingAbstractNowadays, machines are becoming more and more intelligent. With the coming of intelligent era, intelligent machines also bring many conveniences to people. Home intelligent machine is the most widely used place, and intelligent sweeping can bring great convenience to people. It can not only bring comfortable and clean environment to human, but also promote the development of social intelligence.This paper mainly designs a simple intelligent sweeper. The core control component of the sweeper is STC89C52, which has the advantages of simple programming, low cost, more functions and high efficiency, so it is widely used in the market. In addition, the sweeper can automatically avoid obstacles and use the fan for dust collection. This paper introduces the whole manufacturing process of the sweeper system, which is mainly composed of the main control circuit, the minimum system circuit, the infrared photoelectric obstacle avoidance circuit, the key start stop circuit and the motor drive circuit. By using the integrated circuit design software of Altium designer, the schematic diagram and circuit board are designed. Secondly, the logic of the whole sweeper is controlled by the program of keil.Keywords: intelligent vacuum cleaner; barrier; stc89c52 single chip microcomputer; L298N目录1、概述 ............................................................ 错误!未定义书签。
扫地机器人电源原理
扫地机器人电源原理扫地机器人作为现代家庭清扫工具的重要代表,广受人们的青睐。
它的出现彻底改变了传统的家务清扫方式,为人们带来了极大的便利。
而作为扫地机器人的核心部件之一,电源系统的设计和运行原理对其性能和使用效果有着至关重要的影响。
扫地机器人的电源系统主要由电源适配器、充电器、电池和电池管理系统等组成。
其中,电源适配器和充电器负责为机器人提供外部电源,而电池和电池管理系统则是机器人的主要能量来源。
电源适配器是扫地机器人的外部电源接口,通过插座连接供电。
适配器的主要作用是将交流电转换为直流电,以满足机器人内部电路的工作需求。
适配器通常具有一定的额定功率和电压,根据扫地机器人的功率和电压需求进行选择。
充电器是扫地机器人电池的主要充电装置,其工作原理类似于电源适配器。
当机器人电池电量不足时,充电器将外部电源转换为适合电池充电的直流电,通过连接电池接口将电能传输给电池。
充电器通常具有一定的充电电流和电压,以便在合理的时间内为电池充电。
电池是扫地机器人的能量储存装置,其工作原理基于化学反应。
目前扫地机器人主要采用的是锂离子电池,其具有较高的能量密度、较小的体积和较长的使用寿命。
锂离子电池通过正负极之间的离子迁移来释放和储存电能。
当机器人在工作过程中消耗电能时,电池会释放储存的电能供机器人运行;当电池电量不足时,充电器会将外部电源转换为直流电,通过充电接口将电能传输给电池进行充电。
电池管理系统是扫地机器人电池的管理和保护装置,其主要功能是监测电池电量、温度和电流等参数,并根据需要对电池进行充电、放电和保护。
电池管理系统具有智能化的特点,能够根据电池状态进行合理的管理和控制,以延长电池的使用寿命和提高机器人的续航能力。
总的来说,扫地机器人电源原理是通过电源适配器和充电器将外部交流电转换为直流电,通过电池和电池管理系统储存和管理电能,为机器人的正常运行提供能量支持。
这种电源系统设计使得扫地机器人能够自主工作,并在电量不足时及时充电,确保了机器人的连续清扫能力和长时间使用效果。