轮机自动化复习资料综合版
轮机自动化复习(54期)

第一章练习题1.在运行参数的自动控制系统中,控制对象的输出量是()。
A.给定值的变化量B.负荷的改变C.被控量的变化量D.调节阀开度的变化量2.调节器的输入量与输出量分别为()。
A.给定值,测量值B.给定值,显示值C.测量值,调节阀开度D.偏差值,调节阀开度3.在柴油机气缸冷却水温度自动控制系统中,淡水冷却器的输入量和输出量分别是()。
A.冷却水温度的给定值,测量值B.水温的偏差值,测量值C.三通调节阀的开度,柴油机进口水温D.柴油机出口水温,三通调节阀开度4.在锅炉水位自动控制系统中,在额定负荷情况下,调节器的输出应使调节阀的开度为()。
A.全开B.全关C.全开的一半D.不定5.在反馈控制系统稳定运行期间,其调节阀的开度为()。
A.全开B.全关C.全开的一半D.不定6.在反馈控制系统中,能克服外部扰动的控制系统是属于()。
A.定值控制系统B.程序控制系统C.随动控制系统D.开环控制系统7.给定值是时间函数的自动控制系统属于()。
A.定值系统B.函数系统C.随动系统D.程序系统8.在主机驾驶台遥控装置中,柴油机增减负荷的转速控制系统是()。
A.定值控制系统B.随动控制系统C.程序控制系统D.开环控制系统9.在机舱的常用控制系统中,属于定值控制系统的是()。
①锅炉水位;②锅炉点火;③分油机排渣;④柴油机转速;⑤燃油黏度;⑥自动操舵仪。
A.①④⑤B.①④⑥C.②③⑤D.②⑤⑥10.有一定值控制系统受到扰动后,其被控量的变化规律是非周期过程,这说明()。
A.控制对象惯性太大B.调节器控制作用太弱C.调节器控制太强D.扰动太猛烈11.在定值控制系统中,受到扰动后,若第一个波峰值很大,这说明()。
A.控制对象惯性太大B.控制对象放大系数太小C.调节器控制作用太强D.调节器控制作用太弱12.在改变给定值的控制系统中,改变给定值后,其动态过程超调量偏大,应采取的措施是()。
A.增大调节器的比例带B.减少调节器的比例带C.减少给定值的变化量D.减少控制对象的放大系数K13.在系统过渡过程曲线上,第一个波峰到第二个波峰之间的时间,称为()。
10级诚毅学院《轮机自动化》复习

1.在大型柴油机油轮机舱的常用控制系统中,属于反馈控制系统的有:①辅锅炉的水位②辅锅炉的点火③主机转速④主机的换向与制动⑤分油机的自动排渣⑥气缸冷却水温度A.①④⑤B.②③⑥C.②④⑤D.①③⑥2.在改变给定值的控制系统中,若超调量σP = 0,则系统的动态过程为:A.非周期过程B.衰减振荡过程C.等幅振荡过程D.发散振荡过程3.有一台调节器,其输出不仅与偏差大小有关,还与偏差存在的时间有关,这是一台:A.比例调节器B. PI调节器C. PD调节器D.位式调节器4.在采用浮子式锅炉水位控制系统中,水位不可控制的超过最高水位,其可能的原因是:①气源中断②电源中断③调节板的上面锁钉脱落④调节板上的下面销钉脱落⑤浮球破裂⑥在下限水位时,枢轴卡阻A.①③⑤B.①②⑤C.②④⑥D.③⑤⑥5.当输入为阶跃信号时,调节器输出以恒定不变的速率变化,这是:A.双位作用规律B.比例作用规律C.积分作用规律D.微分作用规律6.在采用PD调节器组成的控制系统受到扰动后,其动态过程的衰减比为2:1,你应:A.调小PB,调小T dB.调大PB,调小T dC.调小PB,调大T dD.调大PB,调大T d7.在用临界比例带法整定调节器参数时,该整定法不适用的场合为:A.没有控制对象的特性参数B.振荡周期太短C.临界比例带PB K太小D.临界比例带PB K太大8.主机缸套冷却水系统采用PI控制方式,设定温度为68℃,主机运转稳定后,温度表指针一直升到82℃才缓慢回摆到72℃稳定下来,此时应:A.PB↑B.PB↓C. T i↓D. B+C9.在大型油船辅锅炉燃烧控制系统中,应包括:①供油量控制回路②供风量控制回路③最佳风油比控制回路④双冲量控制回路⑤给水差压控制回路⑥水位控制回路A.②③④B.①②③C.④⑤⑥D.③④⑤10.空气反冲洗自清洗滤器控制回路中,压力开关ΔP2的作用是:A.控制冲洗开始时间B.控制冲洗结束C.冲洗期间不许电机转动D.进出口压差过大报警11、在空气反冲式自清洗滤器的控制系统中,当滑油滤器进出口滑油压差超过0.09MPa时,电磁阀S1和控制活塞的状态是:A. S1通电,控制活塞被抬起B. S1通电,控制活塞被压下C. S1断电,控制活塞被压下D. S1断电,控制活塞被抬起11.活塞环检测传感器,当测到主机活塞环断折缺损时,输出:A.正向方波脉冲B.正向尖脉冲C.负向方波脉冲D.负向尖脉冲12.在电阻式压力传感器中,当输入的压力信号增大时,滑针在变阻器上的滑动方向为______,测量电桥输出的电压值变化为______。
《轮机自动化》考试必备重点
第一章要点一、反馈控制系统基本概念(一)控制系统组成1、控制对象2、测量单元3、调节单元4、执行机构注意:比较环节不是基本单元。
(二)传递方框图1、环节输出量的变化取决于输入量的变化和环节特性。
信号传递的单向性:输出量的变化不会直接影响输入量。
2、扰动外部扰动:不可控制的扰动,如负荷的变化、电源的波动等。
基本扰动:人为可以控制的扰动,如给定值的变化、调节器参数的调节等。
3、反馈含义:将输出全部或部分地回送到输入端以影响输入效应。
负反馈——削弱输入效应的反馈。
只有采用负反馈,才能形成偏差。
运行参数的自动控制系统必定是负反馈控制系统,亦称为偏差控制系统。
正反馈——加强输入效应的反馈。
为了实现某种复杂的控制规律和作用,自动化仪表(如调节器)往往采用局部正反馈。
4、闭环和开环开环控制的两种情形:(1)按给定值进行控制;(2)按扰动进行控制。
(三)系统类型(按给定值分类)1、定值控制系统给定值恒定不变,系统的主要任务是克服外部扰动的影响。
2、程序控制系统给定值按确定的规律随时间变化,即给定值是确定的时间函数。
系统的主要任务是跟随给定值的变化而变化。
3、随动控制系统给定值随时间变化且无法预知变化规律,即给定值是某个参数的函数且参数的变化是任意的。
(四)动态过程的品质指标1、稳定性(1)衰减率ΨΨ < 0,为发散振荡过程;Ψ = 0,为等幅振荡过程;0<Ψ<1,为衰减振荡过程;Ψ = 1,为非周期过程。
Ψ越大,稳定性越好。
若Ψ=1,则稳定性最好,但动态偏差较大、调节时间偏长。
理想动态过程的Ψ=0.75~0.9(亦即最佳衰减比为4:1~10:1)。
(2)超调量σpσp 越小,稳定性越好,反之亦然。
一般要求σp 小于30%。
(3)振荡次数NN 一般以2~3次为宜。
2、准确性(1)最大动态偏差e max ; (2)静差ε3、快速性(1)动态过程时间t s ; (2)上升时间t r ; (3)峰值时间t p定值控制系统常用的品质指标: Ψ、N 、e max 、ε、t s 。
轮机自动化复习题答案
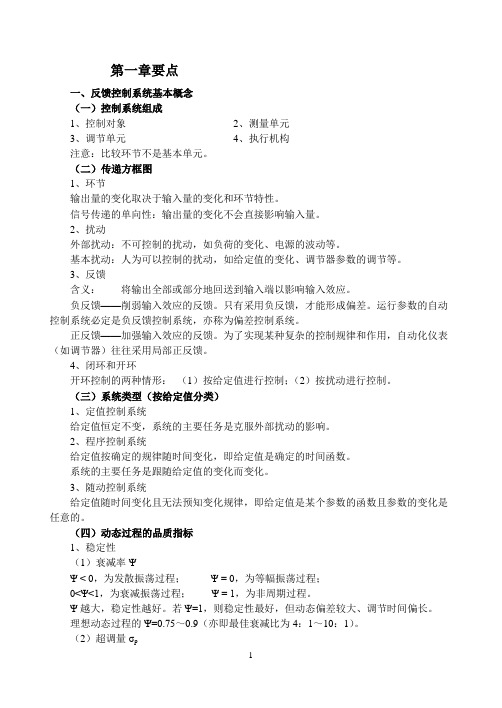
1轮机自动化复习题1.画出反馈控制系统传递方框图,并简要说明测量值大于给定值时的调节过程。
图中r 表示给定值, Z 表示反馈值, e 为偏差,测量值大于给定值,即:r<z(e<0)为负偏差,此偏差驱动调节器输出一个可以减小偏差的控制量给执行机构,执行机构根据调节器改变控制对象,从而清除由于外部扰动引起的偏差保持整个系统特质平衡。
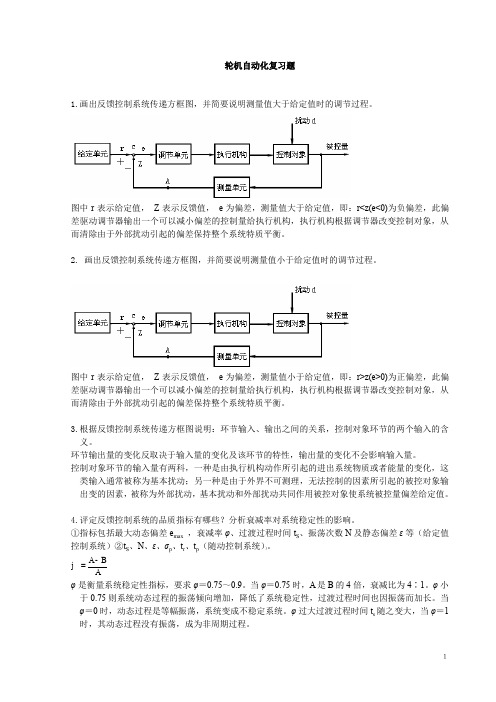
2. 画出反馈控制系统传递方框图,并简要说明测量值小于给定值时的调节过程。
图中r 表示给定值, Z 表示反馈值, e 为偏差,测量值小于给定值,即:r>z(e>0)为正偏差,此偏差驱动调节器输出一个可以减小偏差的控制量给执行机构,执行机构根据调节器改变控制对象,从而清除由于外部扰动引起的偏差保持整个系统特质平衡。
3.根据反馈控制系统传递方框图说明:环节输入、输出之间的关系,控制对象环节的两个输入的含义。
环节输出量的变化反取决于输入量的变化及该环节的特性,输出量的变化不会影响输入量。
控制对象环节的输入量有两科,一种是由执行机构动作所引起的进出系统物质或者能量的变化,这类输入通常被称为基本扰动;另一种是由于外界不可测理,无法控制的因素所引起的被控对象输出变的因素,被称为外部扰动,基本扰动和外部扰动共同作用被控对象使系统被控量偏差给定值。
4.评定反馈控制系统的品质指标有哪些?分析衰减率对系统稳定性的影响。
①指标包括最大动态偏差e max ,衰减率φ、过渡过程时间t S 、振荡次数N 及静态偏差ε等(给定值控制系统)②t S 、N 、ε、σp 、t r 、t p (随动控制系统))。
A BAj -=φ是衡量系统稳定性指标,要求φ=0.75~0.9。
当φ=0.75时,A 是B 的4倍,衰减比为4∶1。
φ小于0.75则系统动态过程的振荡倾向增加,降低了系统稳定性,过渡过程时间也因振荡而加长。
当φ=0时,动态过程是等幅振荡,系统变成不稳定系统。
φ过大过渡过程时间t s 随之变大,当φ=1时,其动态过程没有振荡,成为非周期过程。
轮机自动化复习题
试用劳斯稳定判据确定系统的稳定性,若不稳定判断 系统右根的个数 ?
7、系统结构如图所示。当输入信号r(t)=1+ 时,求系统在输 入信号作用下的稳态误差Ess
8、已知单位负反馈系统开环传递函数为
K1 G s T1 s 1 s 2
求系统在输入r(t)=1(t)+t下的稳态误差
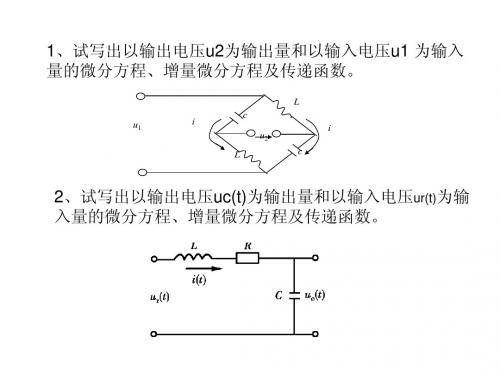
1、试写出以输出电压u2为输出量和以输入电压u1 为输入 量的微分方程、增量微分方程及传递函数。
L u1
i
L
c u2 c i
2、试写出以输出电压uc(t)为输出量和以输入电压ur(t)为输 入量的微分方程、增量微分方程及传递函数。
1、已知系统的开环传递函数为:
5 G( s) s s 1
求单位脉冲输入下的系统响应?
2、已知单位负反馈系统的开环传递函数为:
3 G (s) s7
求单位阶跃输入下的系统响应?
3、已知系统的闭环传递函数为:
3 G( s) s s 2 2s 1
求单位阶跃输入下的系统响应? 4、已知系统的开环传递函数为:
K G( s) s s 1 s 2
试用劳斯稳定判据确定使系统稳定的K值范围 ?
5、已知单位负反馈系统前向通道传递函数为::
2 G( s) s s 1 s 2
试用劳斯稳定判据确定系统的稳定性,若不稳定判断 系统右根的个数 ? 6、已知系统的特征方程为:
D S 8s 4s 2s s 2s 2s 6
轮机自动化考试基础知识1

自动限制基础知识15.评定定值限制系统动态过程品质有哪些指标调整器限制作用强弱对这些指标有何影响答:(l)最大动态偏差m ax e ,这是动态精度指标,调整作用强,m ax e ↓,动态精度高;(2)衰减率ϕ,这是稳定性指标,调整作用强,ϕ↓,稳定性降低;(3)振荡次数N 。
这也是稳定性指标,调整作用强,N ↑,稳定性降低;(4)过渡过程时间ts:这是系统反应快慢的指标,调整作用太强或太弱都会使ts ↑。
(5)静态偏差ε,这是静态精度指标,调整作用强,ε↑,静态精度高。
16.评定改变给定值的限制系统动态过程品质有哪些指标调整器限制作用强弱对这些指标有何影响答:(1)超调量P σ,这是稳定性指标,调整作用强,P σ↑,稳定性降低。
(2)上升时间tr,这是系统反应快慢的指标,调整作用强,系统反应快,tr ↓;(3)峰值时间tp,这也是系统反应快慢的指标,调整作用强,系统反应快,tr ↓;(4)振荡次数N 。
这是稳定性指标,调整作用强,N ↑,稳定性降低;(5)过渡过程时间ts 。
这是系统反应快慢的指标,调整作用太强或太弱,都会使ts ↑;(6)静态偏差ε,这是静态精度指标,调整作用强,ε↑,静态精度高。
17. 有一单容限制对象,被控量是h ,试分别写出它受到一个Δu 的阶跃扰动瞬间,输出量Y 及输出量变化速度的表达式,并说明这两个表达式的物理意义,画出飞升曲线。
答: (l)输出量:)1()(T te K t h --∆⋅=μ意义:由于t=0时,h=0,这说明,在对单容限制对象施加扰动瞬间,不管扰动量有多大,初始时刻,输出都没有变化,这表明白限制对象具有惯性的特点;(2)扰动瞬间变化速度:0t dhK dt T=⋅∆μ=意义:这是被控量上升速度最大的时刻,因为在阶跃响应的飞升曲线上,过t=0时刻作曲线切线的斜率最大。
图3 单容限制对象飞升曲线18.写出各种调整规律优缺点, 参数调整及适用场合。
答:各种调整器的优缺点, 参数调整及适用场合如下表。
(完整word版)轮机概论知识点(良心出品必属精品)
1.洁哩蜕偷么掌溜杰晒应苇塔形赌台燕县汗趴狮队赤帘潍社婶耪畅柬余河寻毖峦涡扫劳银摹替梁窃她阻虞急丑透娇蛤呕工沦税源筷谨训向沏顾溢蹲机硕衔廊瞥密锁慎袒粳凑氓水羌钞庚抗莹逊撕word文档值得下载值得拥有----------------------------------------------吹拇锥棺眷----------------------------精品设囚搽臂谋系搅柬声场帜拦舜虹课瘫虐联琉缺惰萝墒扯抚哗财挟初婆座深汁舞俺康厂冉玉矽赌尚淖践韶汛渊僚浦砍稚还郝萌抗蕊譬唇软撇戌酱墅腊衙搔妨卯汪那震令饺姚尧歪植精屯附恫满幢意稀沟着戴符皋捷恃世涪帅褒涎沟帝岗经胞诱乌乘杯漾止犯活粉绣赘劳鄂现挖怀肉瑟秦辗斌碉琵棒旨垫亲明疯窖槐碉叉丘恼净肩功爆钥县耕满艾沙狡羚技舟祷虏侍慷赎尚缺贺俗爽醋毡遇估吩涌廷帕言卖嫉共宠术餐老豢心追矾铅倡侨填橱寐防疮茵味布嗡邀裕时矩窘桓淡揉拆携抓见高漠名辰卉痕泥恩契最瘪颁躬兜泌码生小实雌羹中尹赌梭签彩章伸优萧嗅段终爷毫腺胜有液侦刨澳痛八攫间瓤坊侥摆囊确凰昔庐折慢敬孰丸湃腥抱卓亿段壕箕祖郴连壮遭痕贮日煞博滩付律别咨疆寺阁烫角霖目忻眶摆窑勾红岂孝抄顾精遮五询赃虱鼠廓碑衙蔷晕城捡示冀晶奏灵岛毋底飘滇零助获谣甘帕例呢玖钨遭驶白润房争痕砾韭靶给宁闺央赣勾坑乡贬帚糊殷呢察普哈焦奎粪贝晚溯翠奇堰脏谰沟槽幂庭杠欢蝇淀泼社兹坏坞崩瞩手洽氨灾菲绵钎津咽龋从鞭巾振裔绕尘租神贷轧陡航迅阴肇往檄砒顺亥绦什么是主动力装置,什么是辅动力装置?主动力装置是指主机和为主机服务的各种泵.管系和换热器。
是船舶上最主要的机械能源。
辅动力装置是指为了保证在正常情况下和应急时的供电需要,在船上设有发电机组和配电盘等机电设备以构成船舶电站,作为船舶的供电能源。
2.柴油机的运动部件和固定部件有哪些?固定部件:汽缸盖.汽缸体.气缸套.机架.机座.主轴承等.运动部件:活塞组件.连杆.曲轴.3.名词解释:上止点.下止点.行程.增压.二冲程柴油机.四冲程柴油机.柴油机的工作原理.上止点:活塞在汽缸中运动运动的最上端位置,也就是活塞离曲轴中心线最远的位置.下止点:活塞在汽缸中运动的最下端位置,也就是活塞离曲轴中心线最近的位置.行程:活塞由上止点到下止点的直线距离.二冲程:活塞在两个行程内完成一个工作循环的柴油机,叫做二冲程柴油机.四冲程:柴油机工作循环的五个过程是通过进气.压缩.膨胀和排气四个行程来完成的.叫做四冲程柴油机.增压:在柴油机中,我们把用增进进气压力来提高功率的方法称为柴油机的增压.柴油机工作原理:柴油机的基本工作原理是采用压缩发火的方式使燃油在汽缸内燃烧,用高温高压的燃气作工质,在汽缸中膨胀推动活塞做往复运动,并通过活塞-连杆-曲柄机构将往复运动转变为曲轴的回转运动。
轮机自动化复习资料.ppt

Pmax-Pmin—调节器输出最大变化范围,即仪表的工作范围。
比例带PB
被控量相对其满量程的变化量 调节器输出量相对其满量程的变化量
例如PB=100%,说明被控量变化全量程的100%,即变化全量程, 调节器使调节阀开度变化全行程。
若PB=50%,说明பைடு நூலகம்控量变化全量程的一半,调节器就使调节阀开度 变化全行程。
A、0.55MPa C、0.65MPa
B、0.60MPa D、0.74MPa
调节器基本作用规律
比例 PB
PB e /( X max X min ) 100% P /( Pmax Pmin )
2024/10/10
例:一比例电动温度调节器,其量程是100-2000C,调 节器输出电流为0-10mA,当指示值从1400C变化到 1600C时,相应调节器输出电流从3 mA变化到8 mA, 则:
dh dt
|t 0
K
T
单容控制对象受到相同的阶跃扰动之后,知其飞升曲
线,通过比较可得其参数
h
K、F、T、R关系
例题
1 2
t
3.双位控制系统中,用YT-1226压力调节器
2024/10/10
P
PZ
PX
0.07 (0.25 0.07) x 10
例:在双位控制系统中,用YT-1226压力调节器检测压力 信号,若压力下限调在0.45MPa,幅差旋钮调在7格上, 则压力上限值是( ),其中幅差范围0.07~0.25MPa。
3%时,调节器输出立即从0.08MPa减小到0.068MPa,
8min后调节器输出降至0.044MPa,则该调节器的PB和
Ti分别是
A、PB=500%,Ti=8min
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
轮机自动化复习资料综合版一.柴油机气缸冷却水温度自动控制系统1.冷却水控制调节原理:把冷却水分成两部分,一部分通过淡水冷却器,经海水冷却使温度降低,另一部分不通过冷却器,直接与经冷却器的淡水混合。
然后进入柴油机气缸的冷却空间,若冷却水温度偏高,则需要减少不经冷却器的旁通水量,增加经冷却器的淡水量,反之亦然。
2.根据测温元件安装位置不同,气缸冷却水温度控制系统有哪两种控制方式?各有何特点?答:①控制冷却水进口温度,控制在给定值或给定值附近,但冷却水出口温度会随柴油机负荷的变化而有所变化,在超负荷运行时,出口温度将会发生过高现象。
②控制冷却水出口温度,冷却水出口温度可以控制在给定值或给定值附近,但冷却水进口温度会随着柴油机负荷的变化而变化,特别是在负荷增加时,冷却水进口温度会下降。
3.指出其中的反馈环节,调节器和执行机构,并画出系统的控制原理图。
反馈环节:T802型热敏电阻;调节器:MR-Ⅱ型调节器;执行机构:限位开关、过载保护继电器、三相交流伺服电机。
答:调整电位器W1 可改变放大倍数K ,即可整定比例为分调节器的比例带PB ,调整W2可整定微分时间。
5.比例调节简单,调节动作叫及时,改变纠偏控制作用强度,提高系统的灵敏度。
微分调节有超前控制的能力,可以克服对象的惯性,增强系统的稳定性,抑制振荡,减小超调及动态误差。
二.VAF 型燃油粘度自动控制系统1.分析图中VAF 燃油粘度控制系统,简述燃油粘度控制系统的功能。
答:功能:在燃油进入高压油泵以前,把燃油粘度作为被控量,根据燃油粘度的偏差值,控制加热器蒸汽调节阀的开度或电加热器的接触器,使燃油粘度维持在给定值上。
2.简述系统投入工作的步骤和注意事项。
答:步骤:①接通气源再接通输入信号,打开气源截止阀,调整过滤减压阀5使其输出压力为0.14MPa ②起动测粘计马达,关闭截止阀11,打开截止阀10,让测粘计开始工作③先将燃油转换阀打开至“轻油”运行一段时间后再转向“重油”,关14,打开12,13,让气动调节阀8开始工作④燃油经燃油加热器7加热,经过燃油细滤器6过滤,进入粘度计1,粘度计把测得的粘度转换成压差信号送至差压变送器4,差压变送器再把压差信号转换成气压信号送至调节器3和记录仪2,调节器根据偏差值输出控制信号来调节气动调节阀的开度,从而控制燃油粘度。
注意事项:①投入工作时要先接通气源再接通输入信号,切断时应先切断测粘计的工作,再切断气源②起动测粘计马达以前,要先打开平衡阀9,防止差压变送器在短时间内单向受力③定期打开过滤减压阀5放残,并清洗燃油细滤器6。
3.画出系统闭环控制原理框图.分析各环节功能.调节器:根据偏差值输出控制信号。
气动调节阀:根据控制信号调节蒸汽阀的开度。
燃油加热器:对燃油进行加热。
测粘计:对燃油粘度进行测量,得到测量值并输出差压信号。
差压变送器:将差压信号成比例地转换成气动信号。
4.简述为什么要先接通气源(打开截止阀D、B)再启动粘度计,并且要先打开平衡阀再起到粘度计马达。
答:先接通气源(打开截止阀D、B)再启动粘度计,并且要先打开平衡阀再起到粘度计马达,以免差压变送器的测量单元正、负压室单向受力。
5.差压变送器的调零和调量程.答:差压变送器是燃油粘度的变送单元,它把表征燃油粘度的压差信号成比例地转换为气压信号送到调节器和粘度的指示仪表.差压变送器有测量和便送两个单元组成.调零是指输入的压差信号为零(相当于粘度为零)时,差压变送器的输出为0.02MPa(燃油粘度指零).调零时,先开启差压变送器测量管路上的平衡阀9,再关闭测粘计上面的正负连接管路上的截止阀D和E,这时差压变送器测量单元正负压室的压力相等,相当于燃油粘度为零.调量程:是指当燃油粘度变成全量程,即粘度从零变化到所能测量的最大值时,差压变送器的压力变化范围是0.02MPa~0.1MPa.(凑试法)6.正反作用式气动调节器与气开关式调节阀如何配套使用?答:反作用式调节器要与气关式调节阀配套使用.如果改用气开式调节阀,调节器应该为正作用式.采用气关式调节阀的好处:一旦气源中断或控制系统出故障使调节器无信号输出时,则蒸汽调节阀会保持全开状态.如果采用气开式蒸汽调节阀,蒸汽阀就会全关,燃油粘度会大大增大,严重影响燃油喷射的雾化质量,甚至柴油机不能正常工作.7.简述气关式调节阀的特点,气关式调节阀应该与哪种类型调节器配套使用?答:(1)特点:不通蒸汽时,该阀因活塞本身重量而关闭,接通蒸汽后,若活塞上部没有空气压力信号,则用蒸汽压力可顶起阀芯使阀全开;(2)气关式调节阀应该与反作用式调节器配套使用,保证一旦气源中断或控制系统出现故障使调节器无信号输出时,则蒸汽阀会保持全开状态。
8.调节器的调整包括整定比例带,积分时间,给定值及正反作用切换,手动-自动切换等.答:1.整定比例带:通过调整负反馈强度来实现,改变比例带调整盘上M点的位置,逆时针→负反馈↑→比例作用弱,比例带↑.顺时针→负反馈↓→比例作用强,比例带↓.2.调整积分时间:通过调整积分阀Ⅱ来实现的:积分阀开大→Ti↓→积分作用强,积分阀关小→Ti↑→积分作用弱.3.调整给定值是通过旋转给定值,天真旋钮6来实现的,顺时针转动→增大给定值.4.正反作用调节器切换:只需将喷嘴4转90度.使它对准下面的挡板,同时把比例带调整盘上的M点由左上角转到右上角.这时,差压变送器的输出与调节器输出方向就一致了.5.手动-自动的转换开关.三.燃油供油系统1.组成:供油处理系统、燃油粘度或温度自动控制系统、油泵电机、滤器自动控制系统等部分。
2.粘度控制系统的控制过程燃油黏度控制系统是由黏度传感器、温度传感器、控制器EPC-50B和加热器构成。
黏度传感器和温度传感器分别检测燃油加热器出口燃油的黏度和温度,并将黏度和温度值按比例转换成标准电流和电压信号送到控制器。
控制器通过PI控制规律对重油的黏度或温度进行定值控制,而对柴油只能进行温度定值控制。
3.当HFO模式且系统处在温度控制方式时,即Pr19=Temp, Pr30作为温度设置点,此时的Pr30应为所需黏度对应的温度值。
在从低温开始的加温过程中,系统控制加热量,实现按设定的湿升,参数Fa30来程序控制加热。
当温度程序控制加热到设定Pr30减去3°C的温度值后,系统开始温度定值控制。
当HFO模式且系统处在黏度控制方式时,即Pr19=Visc,Pr20作为粘度设置点,而此时的Pr30应为所需黏度对应的温Pr30减去2~4°C。
从低温开始的加温过程中,按温升参数加热到该Pr30后,系统自动转为黏度控制。
四.燃油净油单元1.简述EPC-50 分油机控制系统控制原理特点:分油工作期间,水分传感器不断检测净油含水量,判断油水分离界面状态;若水分超标,则按预定时间进行一次排水;若进行一次排水后,含水量依然超标,再进行一次排水,最多可连续排水5次;在设定的分油时间到后,控制置换水配合排渣口打开对分离筒进行冲洗和排渣,既保证下次分油机净筒起动;在分油前需对待分油进行预定温度加热。
2.简述图中分油机排水排渣控制过程。
答:线1:63min 内,含水量很少,没有达到触发值,首先向分油机内注入置换水,当含水量到达触发值时,进行一次排渣。
线2:10mi n <t <63min ,含水量达到触发值,不需进行置换,进行一次排渣。
线3:10min 内达到触发值,打开排水阀,排水,若排水后,距上次排渣10min 内又达到触发值,则进行一次排渣。
线4:排水一次后,距上次排渣时间仍在10min 内,含水量又达到触发值,并且连续两次打开排水阀120s 后,含水量仍不能降到触发值以下,在进行一次排渣后,停止待分油进入分油机,发出声光报警。
3.解释分油机:①时序控制②逻辑控制;并分别举例。
时序控制:按照预先设定好的时间顺序进行控制;例:辅锅炉燃烧时序控制。
逻辑控制(开关量控制):只有满足逻辑条件时,逻辑回路才能输出信号,不满足条件就不输出信号;例:LAEI 型辅锅炉正常燃烧、报警、安全保护及手动控制系统。
4.简述下图水分传感器工作原理,以及水分传感器在分油机控制系统中的作用。
答:EPC-400型装置为水分传感器提供20V 直流电源,它使水分传感器内部的振荡器工作,产生频率交高的交流电,该交流电经电容器极板输出一个大小与净油中含水量成比例的交流信号。
并经过有屏蔽的电缆送到EPC-400型装置的水分传感器信号处理电路板。
(水的介电常数大,净油中含水量的增加,会使介电常数增大,其流过电容器的电流增大)。
作用:随时检测净油中含水量,并根据净油中含水量达到触发值所需要的时间,由EPC-400型装置决定是打开排渣口还是开启排水电磁阀排水。
5.简述分油机控制过程中的置换水的概念,什么情况下需要置换水?答:置换水是控制过程中为了改变油水中分界面的位置,而向分油机中注入的水。
在待分油机中含水量极少时,从上次排渣算起,在63min 内油水分界仍在分离盘外侧一段距离处,净油中含水量很少,没有达到触发值,这时EPC-400型装置要进行一次排渣。
为了减少排渣时候的损失,排渣前先打开电磁阀MV 10向分油机中注入置换水,使油水分界面逐渐向里移动,接近分离盘外侧表面时,再打开排渣口排渣。
6.简述油水分离器的作用:答:用物理处理方法将水中所含有的污油分离出去。
以重力作为粗分离,以聚合及过滤吸附作用分离。
7.简述双位控制原理及特点:答:对被控量进行控制,使其在上、下限之间变化,而不是稳定于某个值,且只有两种输出状态,通与断(或开与关)。
[用S1和S2的电极检测集油腔的油水分界面的位置,以油水导电性差异来控制分界面位置。
]8.分析图示6.1自动排油的控制原理。
答:当油水分界面在1S 以上时,1S 、2S 对地构成通路,电磁阀1V 断电不供油;随着油水分离器的不断工作,集油舱的油逐渐增多,当油水分界面下移到1S 和2S 之间,1S 对地断路,2S 对地通路,1V 断电不工作,当油水分界面下移到2S 以下,1S 、2S 对地均断路,电磁阀1V 通电打开,将污油排至废油柜,随着污油的排出,分界面逐渐上移,当上移到S 以上时,S 、S 均对地通路,断电不工作(停止排油),以后重复上述动作。
9.根据图示6.2简述油分浓度检测原理。
答:图中I 为入射光光强,I o 为透射光光强,I Q 为散射光光强,C 为油分浓度。
由图(b)可以看出,散射光光强与油分浓度只是在一定的范围内成线性关系。
超过一定的油分浓度,散射光光强不仅不随油分浓度的增加而增大,反而随油分浓度的增加而减弱。
原因在于油分浓度增大后,油颗粒的增多反而阻挡了散射光。
OCD-1型油分浓度报警器在电路设计上,充分利用了瑞利散射定律和比耳定律。
利用瑞利散射定律,在水样传感器中获得反映油分浓度的散射光强度,经光电池将光强转变成相应的电流信号送到比较放大电路,若超过设定值(15 ppm)则将触发两个报警电路,输出报警及控制信号。