基于Stm32控制器的LVDT位移测量系统设计(终稿) - 用于合并
基于STM32的远程智能测控单元设计
基于STM32的远程智能测控单元设计【摘要】很多工业场所都需要远程测量与控制装备,而远程测控器具有一定的共性技术要求。
文中设计了基于STM32的远程测控单元,并采用UC/OS_II 实时操作系统。
该系统通用性好,配置灵活,易于扩展,可存储大量数据,响应速度快,适应于特殊工业现场应用。
【关键词】远程测控;STM32;UC/OS_II1.引言在电力、给水、石油、化工等诸多工业应用场合,都需要对一些设备运行状态参数进行远程测量,并根据测量结果实施相应控制,这就需要远程测控器系统。
远程测控器是一种远端测控单元装置,与普通的测控单元相比,该单元应具有良好的通讯能力和更加强大的数据存储处理功能,从而更好地对现场信号、工业设备状态等进行监测和控制。
而新架构AMR-v7 cortex-m3的处理芯片,具有处理能力强大,片内外围设备丰富,易于移植操作系统等突出优势,基于此,本文设计了基于该架构芯片STM32的远程智能测控器单元[1]。
2.总体设计一般远程智能测控单元主要应用于复杂苛刻环境下的工业控制现场,系统的智能化、可靠性、稳定性要求都比普通测控单元要高。
因此设计时,选用的CPU 不仅本身性能要高,而且片内可扩展功能要尽可能多,才能有效简化设计,提高系统整体的稳定性和可靠性。
根据远程测控单元的功能需求,系统应该具有数据采集与转换、远程通信、控制信号输出等功能。
基于此,系统选用具有新架构AMR-v7 cortex-m3内核的STM32芯片作为CPU,设计了数字量输入、数字量输出、模拟量输入单元、PWM 输出、RS232/485通信、存储单元等功能模块,系统结构如图1所示:3.系统硬件设计3.1 CPU选型系统CPU选用意法半导体的STM32F103 VCT6,该MCU芯片基于ARM Cortex-M3内核设计。
Cortex-M3是一个32位的核,采用Tail-Chaining中断技术,对中断的处理是完全基于硬件的,不仅中断反应速度快,一个中断最多可减少12个时钟周期数。
《2024年基于STM32单片机的高精度超声波测距系统的设计》范文

《基于STM32单片机的高精度超声波测距系统的设计》篇一一、引言随着科技的不断发展,高精度测距技术广泛应用于机器人、智能家居、无人驾驶等领域。
本文旨在设计一个基于STM32单片机的高精度超声波测距系统,该系统通过超声波测距原理,实现对目标物体的精确测距。
二、系统设计要求1. 高精度:系统应具备高精度的测距能力,误差应控制在一定范围内。
2. 稳定性:系统应具有良好的稳定性,能够在不同环境下保持稳定的测距性能。
3. 实时性:系统应具备实时测距功能,能够快速响应并输出测距结果。
4. 易于集成:系统应易于与其他设备进行集成,方便实际应用。
三、硬件设计1. 主控制器:采用STM32单片机作为主控制器,负责整个系统的控制与数据处理。
2. 超声波传感器:选用高性能的超声波传感器,实现测距功能。
3. 电源模块:为系统提供稳定的电源,保证系统的正常工作。
4. 通信接口:根据实际需求,可扩展串口、I2C、SPI等通信接口,实现与其他设备的通信。
四、软件设计1. 驱动程序设计:编写超声波传感器的驱动程序,实现对传感器的控制与数据读取。
2. 数据处理程序:对读取的超声波数据进行处理,计算目标物体的距离。
3. 实时性处理:采用中断或定时器等方式,实现实时测距功能。
4. 通信程序设计:根据实际需求,编写与其他设备进行通信的程序。
五、系统实现1. 超声波传感器的工作原理是通过发送超声波并接收其反射回来的时间来计算距离。
系统通过STM32单片机的GPIO口控制超声波传感器的发送与接收。
2. 在软件设计中,通过编写驱动程序,实现对超声波传感器的控制与数据读取。
数据处理由STM32单片机进行计算,将读取的超声波数据进行处理,得到目标物体的距离。
3. 为了保证系统的实时性,采用中断或定时器等方式,实现实时测距功能。
当超声波传感器接收到反射回来的超声波时,中断或定时器触发,STM32单片机立即进行数据处理,并输出测距结果。
4. 根据实际需求,可扩展串口、I2C、SPI等通信接口,实现与其他设备的通信。
《2024年基于STM32单片机的高精度超声波测距系统的设计》范文

《基于STM32单片机的高精度超声波测距系统的设计》篇一一、引言随着科技的不断进步,测量技术在众多领域中的应用日益广泛。
高精度超声波测距系统,以其非接触式、测量速度快和成本低廉的优点,被广泛应用于智能机器人、车辆导航、无人机飞行控制等场景。
本文将详细介绍基于STM32单片机的高精度超声波测距系统的设计,包括系统架构、硬件设计、软件设计以及实验结果分析等方面。
二、系统架构本系统采用STM32单片机作为主控制器,通过超声波传感器进行测距。
系统主要由STM32单片机、超声波传感器、电源模块、信号处理模块等部分组成。
其中,STM32单片机负责控制超声波传感器的发射与接收,以及处理测距数据;超声波传感器负责将超声波信号发送出去并接收反射回来的信号;电源模块为系统提供稳定的电源;信号处理模块用于对接收到的信号进行滤波、放大等处理,以提高测距精度。
三、硬件设计1. STM32单片机:选用性能稳定、功能强大的STM32系列单片机作为主控制器,负责控制整个系统的运行。
2. 超声波传感器:选用高精度的超声波传感器,具有灵敏度高、测量范围广等优点。
通过单片机的GPIO口控制传感器的发射与接收。
3. 电源模块:为系统提供稳定的电源,包括电池或外接电源两种供电方式。
4. 信号处理模块:对接收到的超声波信号进行滤波、放大等处理,以提高测距精度。
四、软件设计1. 初始化:对STM32单片机进行初始化设置,包括GPIO口、时钟等。
2. 控制超声波传感器:通过GPIO口控制超声波传感器的发射与接收,发送一定频率的超声波信号并等待接收反射回来的信号。
3. 信号处理:对接收到的信号进行滤波、放大等处理,然后通过ADC(模数转换器)将信号转换为数字信号。
4. 距离计算:根据测量的时间差(即超声波信号往返的时间),结合声速,计算出物体与传感器之间的距离。
5. 显示与输出:将测量的距离通过LCD或LED等方式显示出来,同时可通过串口或蓝牙等方式将数据传输到其他设备。
基于Stm32控制器的LVDT位移测量系统设计(终稿) - 用于合并讲解

课程设计报告题目:基于STM32的LVDT位移测量系统设计姓名:余樾班级:09011301学号:2013302132西北工业大学自动化学院基于STM32的LVDT位移测量系统设计任务书1.设计目的与要求设计一个基于STM32控制器的LVDT数字测量系统设计,要求认真并准确地理解有关要求,按组完成系统设计,具体设计要求如下:(1)对流体传动管道中的压力进行,测温范围及精度:38mm,0.5%。
(2)LVDT信号的调制与解调,测量数据存储功能,掉电不丢失;(3)4位八段码实时数据显示;(4)通过RS232通信接口与上位机进行数据通信;(5)功能按键、指示灯和蜂鸣器报警。
2.设计内容(1)查阅资料,熟悉设计内容;(2)根据设计要求选择传感器,确定系统方案和主控芯片;(3)根据系统方案分别设计单元电路;确定元器件及元件参数;(4)画出电路原理图,正确使用逻辑关系。
3.编写设计报告写出设计的全过程,附上有关资料和图纸,并写出心得体会。
目录1. 引言 (1)2. 设计方案 (2)2.1. 任务分析 (2)2.2. 设计思路 (2)3. 详细设计 (3)3.1. 主控制器模块 (3)3.1.1. 微处理器电路 (3)3.1.2. 电源模块 (5)3.1.3. JTAG/SWD电路 (5)3.2. LVDT传感器的测量原理与电路设计 (6)3.2.1. LVDT传感器的测量原理 (6)3.2.2. LVDT传感器电路的设计 (6)3.3. 显示模块 (9)3.4. 串口通信模块 (10)3.5. 存储模块 (10)4. 总结与体会(不宜过长) (11)附录1 MAX7219 (14)附录2 I2C总线 (16)基于STM32的LVDT位移测量系统设计摘要: LVDT可以用来测量物体的伸长度、震动频率、振幅、物体厚薄程度和膨胀度等精确数据。
具体还可以用在机床工具和液压缸的定位,以及辊缝和阀门的控制等。
LVDT还有无摩擦测量、无限的机械寿命、坚固耐用、环境适用性等优点,这使它应用范围也非常广泛。
基于stm32和labview的超声波测距系统设计
超声波测距采用反射原理对障碍物的距离进行检测。
测距时,超声波发射器和接收器必须正对被测物体,由发射器发出超声波并开始计时,超声波经空气传播到达障碍物后被反射回来,接收器收到反射脉冲后停止计时,根据超声波的传播速度和计时时间就可计算出与障碍物之间的距离[1]。
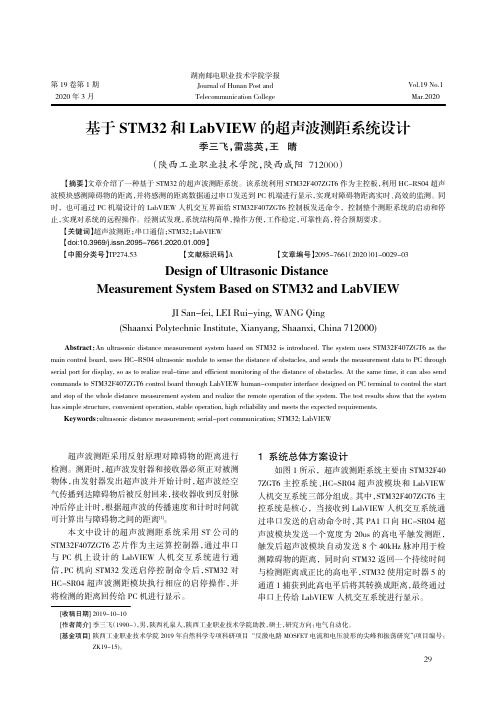
本文中设计的超声波测距系统采用ST 公司的STM32F407ZGT6芯片作为主运算控制器,通过串口与PC 机上设计的LabVIEW 人机交互系统进行通信,PC 机向STM32发送启停控制命令后,STM32对HC-SR04超声波测距模块执行相应的启停操作,并将检测的距离回传给PC 机进行显示。
1系统总体方案设计如图1所示,超声波测距系统主要由STM32F407ZGT6主控系统、HC-SR04超声波模块和LabVIEW 人机交互系统三部分组成。
其中,STM32F407ZGT6主控系统是核心,当接收到LabVIEW 人机交互系统通过串口发送的启动命令时,其PA1口向HC-SR04超声波模块发送一个宽度为20us 的高电平触发测距,触发后超声波模块自动发送8个40kHz 脉冲用于检测障碍物的距离,同时向STM32返回一个持续时间与检测距离成正比的高电平,STM32使用定时器5的通道1捕获到此高电平后将其转换成距离,最终通过串口上传给LabVIEW 人机交互系统进行显示。
基于STM32和LabVIEW 的超声波测距系统设计【摘要】文章介绍了一种基于STM32的超声波测距系统。
该系统利用STM32F407ZGT6作为主控板,利用HC-RS04超声波模块感测障碍物的距离,并将感测的距离数据通过串口发送到PC 机端进行显示,实现对障碍物距离实时、高效的监测。
同时,也可通过PC 机端设计的LabVIEW 人机交互界面给STM32F407ZGT6控制板发送命令,控制整个测距系统的启动和停止,实现对系统的远程操作。
经测试发现,系统结构简单,操作方便,工作稳定,可靠性高,符合预期要求。
《2024年基于STM32单片机的高精度超声波测距系统的设计》范文
《基于STM32单片机的高精度超声波测距系统的设计》篇一一、引言随着科技的不断发展,测距技术在许多领域得到了广泛的应用。
为了满足高精度、高效率的测距需求,本文设计了一种基于STM32单片机的高精度超声波测距系统。
该系统利用超声波的传播特性,结合STM32单片机的强大处理能力,实现了高精度的测距功能。
二、系统设计概述本系统主要由超声波发射模块、接收模块、STM32单片机以及相关电路组成。
其中,STM32单片机作为核心处理器,负责控制超声波的发射与接收,并对接收到的数据进行处理和显示。
三、硬件设计1. 超声波发射模块:本系统采用超声波传感器作为发射模块,其工作原理是通过产生高频脉冲信号来驱动超声波发射。
通过选择合适的传感器,可确保测距的准确性和稳定性。
2. 超声波接收模块:接收模块同样采用超声波传感器,用于接收反射回来的超声波信号。
传感器将接收到的信号转换为电信号,供STM32单片机处理。
3. STM32单片机:STM32单片机作为系统的核心处理器,负责控制超声波的发射与接收,并对接收到的数据进行处理和显示。
STM32单片机具有高性能、低功耗的特点,可满足系统的实时性要求。
4. 相关电路:包括电源电路、信号处理电路等,用于为系统提供稳定的电源和信号处理能力。
四、软件设计软件设计主要包括STM32单片机的程序设计。
程序采用模块化设计,包括主程序、超声波发射程序、超声波接收程序、数据处理与显示程序等。
主程序负责控制整个系统的运行流程,发射程序和接收程序分别控制超声波的发射和接收过程,数据处理与显示程序负责对接收到的数据进行处理和显示。
五、系统实现1. 超声波发射与接收:STM32单片机通过控制超声波发射模块产生高频脉冲信号,驱动超声波发射。
当超声波遇到障碍物时,部分能量会反射回来,被超声波接收模块接收。
2. 数据处理:STM32单片机接收到反射回来的超声波信号后,通过相关算法处理,计算出障碍物与系统之间的距离。
基于STM32的微位移检测系统设计
基于STM32的微位移检测系统设计王选择;侯浩;翟中生;杨练根;刘文超【摘要】研制了一种基于STM32的微位移检测系统设计方案.通过抑制直流漂移的电路处理模块得到直流稳定的两路光电信号.根据两路光电信号的相位特点,采用STM32同步采样两路光电信号,并利用椭圆拟合、最小二乘法、相位解包裹法对采集的数据进行处理运算,计算出微位移.现场测试结果表明:该系统满足微位移测量要求.【期刊名称】《传感器与微系统》【年(卷),期】2016(035)007【总页数】4页(P83-86)【关键词】干涉;微位移;直流漂移;STM32;椭圆拟合;最小二乘法;相位解包裹法【作者】王选择;侯浩;翟中生;杨练根;刘文超【作者单位】湖北工业大学机械工程学院,湖北武汉430068;湖北省现代制造质量工程重点实验室,湖北武汉430068;湖北工业大学机械工程学院,湖北武汉430068;湖北工业大学机械工程学院,湖北武汉430068;湖北省现代制造质量工程重点实验室,湖北武汉430068;湖北工业大学机械工程学院,湖北武汉430068;湖北省现代制造质量工程重点实验室,湖北武汉430068;湖北工业大学机械工程学院,湖北武汉430068;湖北省现代制造质量工程重点实验室,湖北武汉430068【正文语种】中文【中图分类】TP216激光干涉法测量精度高,速度快,适合于微振动的测量[1]。
其信号处理方式一般为干涉条纹的计数细分辨向处理方法,但前提条件是保证干涉信号具有较小的直流漂移。
然而,在实际处理过程中,由于背景光强的影响,直接应用的光电转换干涉信号容易发生直流漂移,对测量结果影响很大。
因此,直流漂移的抑制对干涉的测量显得尤为重要。
四象限光电接收与差分处理[2],是一种目前抑制直流漂移的常规方法。
它主要是通过光电信号的两两相减来消除直流漂移的影响。
这种方法能够很好地消除背景光强的影响,但无法消除由于激光本身光斑不均匀或光强分布发生改变的条件引起的直流漂移。
毕业论文:基于STM32F103的机械位移测量系统的设计
基于STM32F103的机械位移测量系统的设计摘要位移测量系统是一种集机械、光学、电子和计算机等多种技术与一体的智能化仪器。
在先进制造技术与科学研究中有着极其广泛的应用,也是现代工业检测、质量控制和制造技术中不可或缺的测量设备。
在实际的工业控制测量领域,为了提高控制精度,准确地对控制对象进行检测是十分重要的。
传统的机械测量位移装置存在精度不高,体积庞大,操作复杂等缺点,已远远不能满足现在生产的需要,而数显千分尺能将位移量转换成与之对应的数字量输出,主要用于机械位置的检测,具有精度高,体积小,操作方便等优点。
本文介绍了一种机械位移测量系统,实现测量来自外部的不同位移值以及显示。
具体采用32位微处理器STM32F103RBT6作为主控制器,通过接收串口控制台发送的命令,对数显千分尺转化成的数字量进行实时读取和显示,进一步对机械位移量进行处理,将数据存储到EEPROM中,便于日后进行对比,最后通过指示灯判断是否超过正常位移。
论文首先提出位移测量系统的背景和意义;然后,介绍了系统的总体方案,分析了系统的优缺点;其次,介绍了系统的硬件和软件的设计,着重介绍各个硬件电路模块和软件架构;最后对结果进行分析、总结。
关键词:位移测量,数显千分尺,微处理器作者:史江云指导老师:吕建平Design of Mechanical Displacement MeasurementSystem Based on STM32AbstractDisplacement measurement system is intelligent instruments which combines mechanical, optical, electronic technology. It is widely used in advanced manufacturing technology, scientific research and modern industrial inspection, quality control and manufacturing technology. Traditional mechanical displacement measurement device has low accuracy, large volume, complex operation shortcomings, so cannot meet the needs of production now, but digital display micrometer can be used for testing the mechanical position, with high precision, small volume, convenient operation and so on.This paper introduces a kind of mechanical displacement measuring system. This system can realize the measurement of displacement and display the value. It uses STM32F103RBT6 ,a 32 bit microprocessor, by receiving the command which is send from serial console, reading and displaying digital content on the digital display micrometer in real time, storing the data into EEPROM, which is convenient for future comparison, finally judge whether the value previous is over the normal displacement through the LEDs.First ,this paper introduces the background and the significance of displacement measurement system; second ,introduces the overall scheme of the system, analyzes the advantages and disadvantages of the system; third, introduces the design of hardware and software of the system, introduces the hardware circuit and software structure; and last, make an analysis and summary to the paper.Keywords: displacement measuring digital display micrometer MCUWritten by:Shi JiangyunSupervised by:Lv Jianpin目录第一章绪论 (1)1.1引言 (1)1.2 课题主要内容 (2)1.2.1 研究目标 (2)1.2.2主要工作 (2)1.2.3 论文的结构安排 (3)1.3 本章小结 (3)第二章系统总体方案 (4)2.1 总体设计方案 (4)2.2设计难点 (5)2.3本章小结 (5)第三章系统硬件设计 (6)3.1 MCU控制电路的设计 (6)3.1.1 MCU的选取 (6)3.1.2 JTAG口的设计 (7)3.2 电源电路的设计 (8)3.2.1 线性电源的设计 (8)3.2.2 Boost升压电源的设计 (9)3.3电磁阀驱动和指示灯接口电路 (11)3.3.1 电磁阀驱动电路 (11)3.3.2 指示灯接口电路 (11)3.4 I2C总线介绍及接口设计 (13)3.4.1 I2C总线介绍 (13)3.4.2 EEPROM接口电路 (15)3.5 SPI总线介绍及接口设计 (18)3.5.1 SPI总线介绍 (18)3.5.2 数显千分尺与MCU的接口 (19)3.6 与上位机接口电路设计 (20)3.7 过流保护电路 (22)3.8 本章小结 (23)第四章系统软件设计 (24)4.1 软件整体架构 (24)4.2数显千分尺的驱动 (25)4.3 24C01的驱动 (28)4.4上位机软件设计 (30)4.1.1 LabWindows/CVI介绍 (30)4.1.2 上位机操作界面 (30)4.1.3 上位机功能设计 (30)4.5系统软件命令设计 (32)4.6配置信息存储设计 (35)4.7 过流保护软件设计 (36)4.8 本章小结 (37)第五章调试结果 (38)5.1 控制台测试结果 (38)5.2 上位机与下位机通信 (40)5.3 本章小结 (40)第六章总结与展望 (41)6.1 课题总结 (41)6.2 对未来工作的展望 (41)参考文献 (43)附录 (45)致谢 (46)基于STM32F103的机械位移测量系统的设计第一章绪论第一章绪论1.1引言在控制领域中,经常需要进行各种位移量的测量,这就需要一种位移测量系统。
基于STM32F103VCT6的微位移控制系统设计
基于STM32F103VCT6的微位移控制系统设计作者:陈宫王三胜张庆荣李月来源:《现代电子技术》2012年第03期摘要:为实现X-Y-Z三维工作台的精确定位,设计了一种基于STM32F103VCT6单片机和步进电机的三维微位移控制系统。
该系统可与上位机实现串口通信,接收上位机命令并把处理结果反馈给上位机;根据光栅传感嚣提供的位置反馈信息,系统可以通过对步进电机的方向、速度调节来实现精确定位;采用匀加速和匀减速方式对步进电机的速度进行调节.避免了因步进电机的突然加速和急停所带来的丢步和冲击现象。
控制系统的测量实验结果表明,步进电机运行平稳.噪音低定位精度高,控制系统性能稳定可靠。
关键词:STM32F103VCT6;串口通信;位移反馈;速度控制中图分类号:TN71034:TM383.6文献标识码:A交童编号:1004-373X(2012)03-0144-03微位移控制系统是一种集机械、光学、电子和计算机等多种技术于一体的智能化仪器。
在先进制造技术与科学研究中有着极其广泛的应用,也是现代工业检测、质量控制和制造技术中不可或缺的测量设备。
微位移控制系统一般由微定位机构、微位移检测装置和控制器组成。
控制器是微位移系统的指挥中心,它按照一定的控制算法控制微定位平台,使其按照一定的规律运动,来实现精确定位。
传统的三维微位移控制系统一般采用步进电机驱动滚珠丝杠来实现定位。
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即每施加一个脉冲信号,电机就转动一个步距角,因此脉冲数与电机转动的总步进角度是呈线性关系的。
另外.步进电机只有周期性的误差而无累积误差,使得在速度、位置等控制领域用步进电机控制变得非常简单。
步进电机开环控制系统主要优点是结构简单,在控制精度要求不高的场合应用较为广泛,但是在实际应用中,若步进电机升、降速控制不合理,会造成步进电机丢步或过冲;在开环控制系统中,由于步进电机丢步现象的存在,无法获知它是否精确地到达了预定位置,也就无法实现高精度的定位。
基于stm32控制的电压测量监控系统
stm32控制的电压测量监控自动化专业目录1 绪论 (1)1.1 背景 (1)1.2 现状与发展 (2)1.3 论文主要工作 (2)2 系统方案的选择与论述 (3)2.1 A/D模数转换模块 (4)2.2 显示模块 (5)2.3 通信接口 (5)3 理论分析与计算 (5)3.1 逐次逼近型ADC的理论分析与计算 (5)3.2 IIC 总线的结构及工作原理 (7)4 系统硬件设计 (11)4.1 STM最小系统 (11)4.2 电源电路 (12)4.3 ADC接口电路图 (13)4.4 显示及串行输出电路 (13)4.5 EEPROM硬件电路 (14)5 系统软件设计 (15)5.1 单片机程序开发环境 (15)5.2 主程序设计 (16)5.3 电压测量子程序 (18)5.4 存储功能子程序 (18)6 系统测试 (19)6.1 电压测量功能的测试 (19)6.2 数据误差分析 (19)6.3 串口通信功能的测试 (19)7 总结与展望 (20)参考文献 (20)附录 (21)【摘要】本设计以ADC转换为基础,采用ARMCortex-M3内核STM32F103ZET6作为主控芯片来控制,通过串行通信来传送和接收信号,并定时将数据保存到E2PROM中的数字电压测量监控系统,现已广泛地应用于雷达、通信、测控、图像、仪表、医疗、音频等领域,显示出强大的生命力和广阔的应用前景。
【关键词】stm32单片机数字电压 ADC转换监控系统Stm32 Controlled Voltage Measurement Monitoring 【Abstract】 This design is based on the ADC conversion, the ARMCortex - M3 kernel STM32F103ZET6 as main control chip to control, through serial communication to send and receive signals, and time to save the data into the E2PROM chips was introduced digital voltage measurement monitoring system, has been widely used in radar, communication, measurement and control, image, instrumentation, medical, audio, and other fields, showing strong vitality and broad application prospects.【Keywords】Stm32 SCM Digital voltage ADC conversion Monitoring system1 绪论数字电压表(DVM)一直以来都是一种运用模数转换变换成为数字量,也就是说说将连续的模拟量大小经过转换处理后,形成不能连续但是为数值的量,在通过相应的技术将数值呈现出来。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.1.
此次设计,将使用STM32F103芯片获取LVDT传感器的数据,并进行简单的处理,最终将数据传往PC端。具体可分为如下几个任务:
实现LVDT数据的获取
对LVDT数据进行处理并显示
将数据实时传输至PC端
完成数据的实时存储,掉电不丢失
2.2.
1.
2.
2.1.
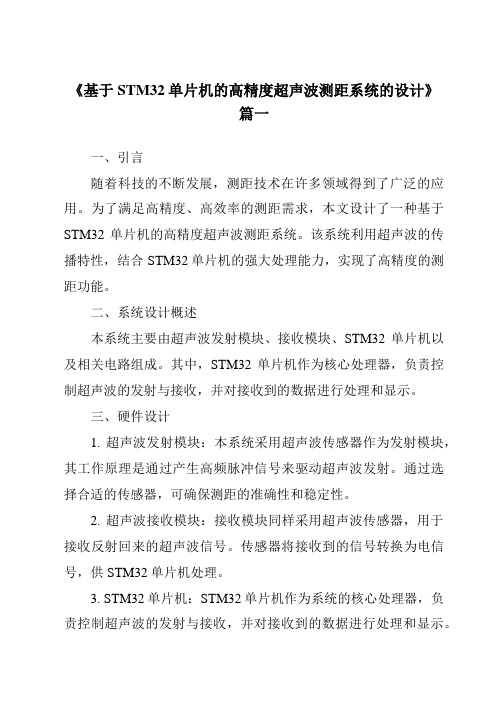
针对以上任务,本次设计以嵌入式模块STM32F103为核心,、通过八段数码管实时显示LVDT传感器的信息,方便用户观察,并可以通过串口将主要信息传送到PC端以进行后续的处理。另外,为了防止掉电数据丢失的情况发生,加入E2ROM存储器件以进行实时的数据采集与存储。总体框架结构如图1所示。
3.1.2.
系统采用锂电池供电,通常的锂电池电压输出为3.7V,而系统正常工作需要5V和3.3V电压,其中STM32需要3.3V电压进行供电,液晶显示的LCD电路以及蓝牙通讯模块需要5V电压供电。因此,设计中采用两级变压方式,第一级将3.7V电压升至5V,第二级将5V电压降至3.3V对控制器供电。
采用自举电路可以将电源输出的电压升至5V,同时,对应于锂电池使用过程中的电压下降,自举电路也可以大致稳定输出电压不变,因此能够使用简单的自举电路完成升压过程。
2个用于DAC的16位基础定时器
14个带有引脚重映射功能的通信接口:2个I C接口,3个USART,3个SPI接口,2个CAN接口,USB2.0全速设备,10/1 OOM以太网MAC
可以看出,STM32F103RBT6是一款具有极其丰富的片内外设,在本设计中将使用其自带的AD转换器进行信号的电压转换。
图3是将SV电压转换成3.3V的电路,在此选用LM1117-33芯片。它是一个低压差电压调节器系列,提供了电流限制和热保护,符合本系统的要求。
图3
3.1.3.
JTAG(Joint Test Action Group)是一种国际标准测试协议,主要用于芯片内部测试及系统进行仿真、调试。在S TM32F 103RB T6处理器中,利用JTAG可以直接控制芯片的内部总线以及I/O口,通过JTAG接口,可对芯片内部的所有部件进行访问,是开发调试嵌入式系统的一种简洁高效的手段。在设计中,对于nTRST, TDI, TMS, TDO端口,分别用lOK的上拉电阻上拉至3.3V。电路设计如图4所示。
= =3.5
C2、C3、C4是AD598构成的位移测量子系统带宽的函数,它们的取值应该相等:
C2=C3=C4= = ;
为了计算AD598增益和满刻度输出范围调节电阻R2,,需要了解以下几点信息:
LVDT的灵敏度S=0.39mV/V/mils;
满刻度可动磁芯位移d=1inch;
(1)对流体传动管道中的压力进行,测温范围及精度:38mm,0.5%。
(2)LVDT信号的调制与解调,测量数据存储功能,掉电不丢失;
(3)4位八段码实时数据显示;
(4)通过RS232通信接口与上位机进行数据通信;
(5)功能按键、指示灯和蜂鸣器报警。
2.设计内容
(1)查阅资料,熟悉设计内容;
(2)根据设计要求选择传感器,确定系统方案和主控芯片;
图1
主控模块:主控模块以STM32F103作为系统的主控制器,其最小系统电路包含电源电路,复位电路,时钟电路,这些均为芯片运行所必需的外接电路模块。
LVDT模块:LVDT模块功能是获取外界位移物理量并且将其转化位电压信号传送至主芯片的AD转换通道处理器将获取的到的电压信号按照建立好的数学模型进行逆解获取位移信息。
由于设计要求为位移量程为38mm,精度0.5%,经过比较选择Schaevitz HR1000型LVDT( )。下图是AD598采用 15双电源时与Schaevitz HR1000型LVDT的连接图:
图8
确定LVDT位移测量子系统所要求的带宽fSUBSYSTEM小于10HZ,取f=10HZ;
选择LVDT激励频率约为2.5KHZ;
本文将基于ARM Cortex-M内核的32位微控制器,即STM32设计一款的LVDT位移测量器,以期能够实现LVDT的位移测量。工作简单流程即通过LVDT传感器获得电压信号,进行信号的简单调理并送入STM32芯片进行处理。STM32主控电路将获取到的数据实现实时的显示存储并传输给PC端进行后续的处理。
3.2.2.
LVDT是一种机电换能器,它的输入为磁芯机械位移,而输出为一对与磁芯位移成比例的AC电压信号,而我们所需要的是DC电压信号,所以还要用到AD598信号调理器来调制信号,下图是AD598的功能图:
图7
AD598为LVDT提供激励电源,检测LVDT次级绕组的输出电压,并提供一个与可动磁性位置成比例的DC输出电压。AD598由正弦波振荡器(OSC)、用来驱动LVDT初级绕组的功率放大器(AMP)、用来确定LVDT两个次级绕组输出电压之差与和的比例关系的解调器、滤波器(FILTER)和输出放大器(AMP)组成。
课程设计报告
题目:基于STM32的LVDT位移测量系统设计
*******
班级:09011301
学号:**********
西北工业大学自动化学院
基于STM32的LVDT位移测量系统设计任务书
1.设计目的与要求
设计一个基于STM32控制器的LVDT数字测量系统设计,要求认真并准确地理解有关要求,按组完成系统设计,具体设计要求如下:
显示模块:显示模块功能是将获取到的位移信息通过4位八段译码器显示出来,实现位移变量的实时监测。
通讯模块:通讯模块将单片机与PC互联,实现单片机与PC端的信息交互。将LVDT传感器获取到的数据传送至PC可以实现信息的互联,为后续开发留下接口。
存储模块:存储模块的功能是将获取到的进行数据存储并保护,防止单片机工作过程中出现意外情况而丢失数据。
本文将简单介绍设计思路与设计方案,并且详细介绍该硬件主控制器设计,LVDT数据获取,数据显示,串口通信,存储等功能模块。
关键词:STM32;LVDT传感器;译码显示;E2ROM
1.
随着科学技术的发展,测试工作量的不断加大,测试任务也越来越复杂,对测量的准确度要求越来越高。多年来,我国精密测量技术和仪器经历了许多变革,从最早广泛应用的机械仪表,到后来发展的光学、电学仪表,以及采用微处理器做成的智能仪表从静态测试到动态测试以及由计算机数字控制的多参数自动测试。由此可见,新的测试技术总是随着电子技术的飞速发展以及计算机科学技术的应用不断地更新换代。位移传感器已经渗透到我们的生活之中。位移传感器的种类繁多,用途也各不相同,精度、量程更是千差万别。为位移传感器分类不是一件容易的事。常见的有电容式、电感式、还有精度较高的光纤式、激光式位移传感器。随着科技的发展,位移传感器家族必然会增加新的成员。现在较为常用的是电容电感式位移传感器,因为它们测量精度较高,价格也便宜于光纤、激光式传感器。在多数场合能够胜任。电感式传感器也有不同的总类,如单螺线管式、间隙式、差动变压式等等。其中精度最好的是差动变压式位移传感器,它的工作原理简单,可靠性高,特别是测量精度较高,因此在工业生产中被广泛的应用。
(3)根据系统方案分别设计单元电路;确定元器件及元件参数;
(4)画出电路原理图,正确使用逻辑关系。
3.编写设计报告
写出设计的全过程,附上有关资料和图纸,并写出心得体会。
基于STM32的LVDT位移测量系统设计
摘要:LVDT可以用来测量物体的伸长度、震动频率、振幅、物体厚薄程度和膨胀度等精确数据。具体还可以用在机床工具和液压缸的定位,以及辊缝和阀门的控制等。LVDT还有无摩擦测量、无限的机械寿命、坚固耐用、环境适用性等优点,这使它应用范围也非常广泛。
该设计题目主要实现位移测量功能,具有一定的设计研究意义,除了测量位移本身外,其他的很多物理量也可以通过转化为位移来测量,测量精度也相对原始的方法较高。
STM32系列芯片STM32F103,STM32F103是基于ARM Cortex-M3内核的32位嵌入式微处理器,它具有出色的内核性能,丰富的外部接口和低功耗。该设计系统采用STM32单片机作为核心控制器件,实现磁棒的小距离位移的精确测量。本设计首先采用AD598元件提供用来驱动LVDT的激励电压,磁芯移动,差动变压器的两个副线圈输出电压信号经过解调、滤波、放大后输出到A/D转换器,A/D转换结果送入单片机进行数据处理、存储,最后将结果通过四位七段数码管显示并传送至PC端。整个系统结构合理,设计简洁,性能稳定,具有较强的抗干扰能力。
选择工作范围在2.5KHZ的LVDT,实例中选择的Schaevitz HR1000型LVDT工作在400HZ~5KHZ,所以符合要求;
确定LVDT次级绕组电压VA和VB之和。根据生产商的数据手册VPRI=3Vrms,调节磁芯到中间位置,此时有VA=VB,测量的两个之和VA+VB=2.80Vrms。
确定LVDT的最佳激励电压VEXC,对于AD598的最大线性度和最小噪声敏感系数来说,AD598输入信号VSEC的范围为1~3.5Vrms,所以选择VSEC=3Vrms。因此LVDT的激励电压为:
图4
3.2.
3.2.1.
差动变压器(LVDT)的原理比较简单。它就是在一个线圈骨架(1)上均匀绕制一个一次线圈(2)作励磁。再在两侧绕制两个二次线圈(3与4),与线圈同轴放置一个铁芯(5),通过测杆(6)与可移动的物体连接。线圈外侧还有一个磁罩(7)作屏蔽,如图5所示。
图5图6
在未引入铁芯以前,一次线圈通入交流电流后产生一个左右对称的沿轴向分布的交变磁场。交变磁场在两个对称放置的二次线圈上产生的感应电动势当然相等,引入铁芯后,铁芯在一次交变磁场的激励下,产生沿铁芯中心轴(当然也是线圈的中心轴)分布并与铁芯对称的交变磁场。这样,线圈中心轴上的磁感应强度就成为铁芯位置的轴向分布函数,于是两个二次线圈的感应电动势Es1与Es2也成了铁芯位置的函数。如果设计得当,两者可成为线性函数关系。将两个二次线圈差接后,即可获得与铁芯位移成线性关系的二次输出:Es=Es1-Es2。这就是LVDT的简单工作原理(如图6示)。