LIN总线学习手记(全)
LIN总线故障检修实训
学习情境五汽车LIN总线故障检修项目一大众汽车LIN线波形的测量一、实训目的学会使用大众的专用测量仪器VAS6356和VAS6150B进行LIN总线波形的测量和分析。
二、实训工具1、VAS6356测量仪器2、VAS6150B诊断仪器3、诊断线束1594D4、大众途安车一辆(右后车窗通信故障)5、维修工具车一辆(含有常用工具)三、技术资料1、大众TEIS维修手册2、实习、实训指导书3、相关教学视频与软件资料四、实训内容1、VAS6356和VAS6150B诊断仪按照面板上的端口标识连接即可或按照维修手册的指导连接。
2、测量LIN总线的信号波形,记录数据并绘制出波形图五、实训记录1、测量正常工作时车窗LIN线的电压和波形(1)识别大众汽车LIN线颜色:车窗LIN通信线的编号:(2)LIN通信线电压测量:红表针接LIN线上一点;黑表针接地;点火开关打开电压:点火开关关闭电压:2、LIN线的波形测量并绘制出波形图:(1)红表针接LIN线上一点;黑表针接地;点火开关打开:六、实训时间:45min七、实操评价序号评价项目考核内容配分评价标准得分1资料查询工艺、资料的获取10分正确地依照实操车型选取技术文件资料2实操准备常、专用工具的准备5分正确地准备实操所需的常用与专用工具各检测设备连接20分根据各检测设备功能、依照诊断仪提示的连接方法正确连接各检测设备3实操实施电压测量20分识读电路图、正确地测量LIN线电压。
LIN总线技术原理基础

– 低成本
• LIN是基于SCI/UART( 通用异步收发接口的单总线串行通信)协议; • 目前几乎所有的微控制器芯片上都有SCI/UART接口。
– 低传输速率。小于20kb/s – 采用NRZ编码。
LIN总线融合了I2C和RS232的特性: 像I2C总线那样,LIN总线通过一个 电阻上拉到高电平,而每一个节点 又都可以通过集电极开路驱动器将 总线拉低;像RS232那样通过起始 位和停止位标识出每一个字节,每 一位在时钟上异步传输。
RIGOL TECHNOLOGIES, INC.
汽车LIN总线技术特点
– 单主/多从媒体访问、无需仲裁。
• 在总线拓扑结构的LIN网络中,由主节点控制对传输介质的访问,从节 点只是应答主节点的命令。不需要仲裁和冲突管理机制。
LIN总线的网络节点数不能超过16,否则,节点增加将会减少网络阻 抗,导致环境条件变差。每增加一个节点,就会降低3%的阻抗
• 大量的车身和安全性能方面的应用对车用网络总线的性能要求并不太 高,只需要一种性价比更高的标准车用网络总线,而LIN总线正好可 以满足这一需求。因此,目前LIN总线技术正被越来越广泛的应用到 车身电子中。
RIGOL TECHNOLOGIES, INC.
汽车LIN总线原理与应用
• LIN 起源和发展 – LIN联盟成立于1999年,并发布了LIN 1.0版本。
• 同步间隔(synchronisation break)
– 作用:标识报文的开始,由主节点发送;使得所有的从机 任务和总线时钟信号同步。
– 同步间隔:至少13bit的显性位,之后紧随至少1bit隐性值 的同步界定符。
– 同步界定符的作用: » 用来检测接下来的同步域(Synch Field)的起始位。
【QC004】汽车总线技术复习笔记04LIN总线系统
【QC004】汽车总线技术复习笔记04——LIN总线系统LIN总线系统◎LIN总线的含义:局部连接(互联)网络LIN(Local Interconnect Network),汽车底层(低端)网络协议。
◎LIN总线的目标:为现有汽车CAN网络提供辅助功能的串行通信总线网络,多用于不需要CAN总线的带宽和多功能的场合,经济,降低汽车成本。
◎LIN总线的典型应用:车上(带有SCI功能的)传感器和执行器的联网,也可用于汽车ECU之间(低速网络)的联网。
应用最多的是灯光照明、车窗座椅、电动天窗等的控制传输。
◎LIN总线与CAN总线的比较:1.CAN总线负责各个LIN总线局域网之间的信息共享与资源控制调配2.LIN总线自诊断信息通过CAN总线传递◎LIN总线结构:网络由一个主节点和多个(可以是一个)从节点构成,主节点可以执行主任务也可以执行从任务,从节点只能执行从任务。
总线上的信息传送由主节点控制。
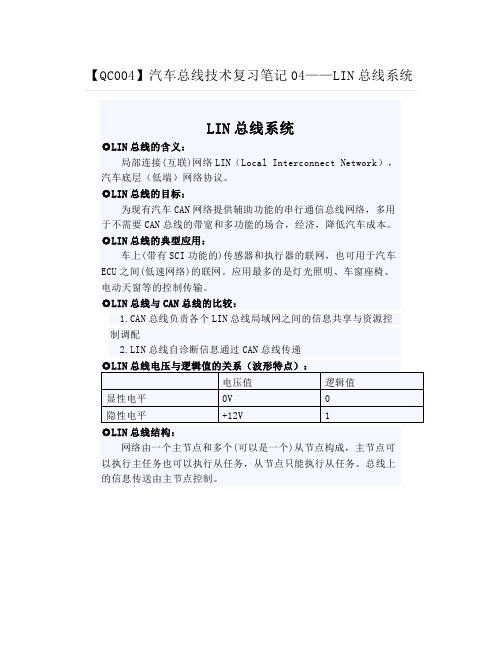
◎LIN总线系统的特点:1.LIN总线采用单主/多从带同步的广播式信息传输方式,网络节点根据在通信中地位分为主节点和从节点,不需要仲裁机制2.基于UART/SCI接口的廉价硬件实现,故LIN节点不一定是汽车ECU,也可能是是带SCI功能的智能传感器和执行器3.从节点无振荡器的自同步功能4.数据传输速度20kb/s,通常一个LIN网络上节点数目小于12个,共有64个标识符5.一帧信息中(有效)数据长度为2、4或8B6.LIN总线系统是单线式总线,底色是紫色,有标志色,该线的横截面面积为0.35mm2,无须屏蔽。
◎LIN总线的协议:所有节点都有一个通讯任务,该通信任务分为发送任务和接收任务;主节点则有(还独有)一个主发送任务(主机任务)。
一个LIN网络上的通信总是由主节点的主发送任务所发起的,即:主控制单元(主节点)发送一个起始报文,该起始报文由同步断点(间隔)、同步字节(场)、消息标识符(场)所组成。
从节点相应地接受并且滤除消息标识符后,一个从任务被激活并且开始本消息的应答传输该应答由2(或4和8)个字节数据(数据场)和一个校验码(校验和场)所组成。
汽车总线应用技术第二章LIN总线技术原理

汽车总线应用技术第二章LIN总线技术原理1.引言LIN(Local Interconnect Network)总线技术是一种低成本、低速率的串行通信总线协议。
它主要用于简单的车内电子系统中,例如门控、窗控、雨刮等。
本章将介绍LIN总线技术的原理及其在汽车电子系统中的应用。
2.LIN总线的结构及特点LIN总线由主控制器(Master)和从设备(Slave)组成。
在总线上,主控制器负责发送指令,从设备负责接收并执行指令。
主控制器和从设备之间通过单个通信线进行数据传输。
LIN总线的数据传输速率通常为最高20kbps,适用于简单、低带宽的应用场景。
3.LIN总线的通信协议LIN总线的通信协议采用了一种主从控制的方式。
主控制器负责周期性地发送帧(Frame),帧中包含了命令和数据。
从设备在接收到帧后,解码命令并执行相应的操作。
从设备也可以向主控制器发送数据。
LIN总线的通信协议还具有缓冲机制和故障检测机制,以保证消息的可靠传输。
4.LIN总线的物理层LIN总线的物理层采用了串行通信方式,使用单个通信线进行双向数据传输。
通信线上的电压可以用来表示逻辑0和逻辑1、为了提高稳定性,LIN总线通常使用差分信号线。
LIN总线的数据传输速率较低,但是使用差分信号线可以提高抗干扰能力。
此外,LIN总线还需要使用电阻进行终端匹配,以确保通信的稳定性。
5.LIN总线的帧结构LIN总线的帧由一个帧头、一个帧标识符和一个帧数据组成。
帧头用于标识帧的起始,帧标识符用于标识帧的类型和目标设备,帧数据用于存储实际的数据。
帧的长度可以根据需要进行调整。
LIN总线的帧结构简单,数据量小,适用于低带宽的应用场景。
6.LIN总线的应用LIN总线技术适用于车内电子系统中的一些简单的控制任务。
例如,门控、窗控、雨刮等。
LIN总线具有低成本、低功耗的特点,适合于车内电子系统中的辅助功能。
总之,LIN总线技术是一种低成本、低速率的串行通信总线协议。
lin总线校验和场原理

lin总线校验和场原理说到LIN总线校验和场原理,咱们可得先理清楚个头绪。
LIN可不是“线”上的“线”,也不是啥特别难懂的东西,它其实是个通信协议。
啥意思呢?就是说,咱们这些电子设备之间,要想顺畅沟通,不像咱们打个电话那么简单,有时得通过一条专门的线来传递信息。
LIN总线就是这条“通信线路”,它能帮助各种电子设备,比如车载电器、传感器、ECU(电子控制单元)等等,彼此交流,确保它们同步工作。
好啦,既然聊到这里,咱们的重点就落到“校验和场原理”上了。
你会发现,这两个词看起来有点专业,但只要放平心态,就能看懂。
首先得说,校验和场其实就是一种“安全保障机制”,你懂的,信息传输一旦出错,可不得了。
你想,信息在网络上传递的时候,就像咱们玩打电话游戏一样,原本清晰的消息,传着传着就有可能变味儿了。
有时候是一点小小的误差,有时候可能就成了大麻烦。
想想看,要是车里的传感器误传了数据,搞不好引发个故障,车子可就不靠谱了。
所以,咱们要做的,就是通过“校验”和“和场”,确保每一条信息都精准无误。
说到“校验”,其实就是一种“验货”机制。
就像你去超市买东西,结账前,收银员会核对价格、数量啥的,确保一切无误。
如果一旦发现错误,马上纠正。
这也是LIN总线传输信息的做法,校验的工作就是对传输的数据进行检查,看它是不是符合规则。
如果出现差错,那就会有个“警报”机制出来,提醒你出问题了。
说白了,它就是个“把关员”,不允许信息出错。
“和场”呢,就是另一种让数据无误的手段。
你想想,如果传输数据有点偏差,咋办?是不是有可能丢了点什么重要信息,或者是信息顺序不对?而“和场”就像是给数据配上一条“加密链条”,在每次数据传输前,数据会先经过校验,进行加密“签名”,这样即便是在传输过程中有些小波动,接收端也能通过这个“和场”检测出来,确保它收到的还是最初的那一份数据。
简单来说,就是“确保你说的每句话都没有歪曲”,这样无论你发了多少条信息,都能放心,啥问题也没有。
LIN总线
LIN总线的认识与分析LIN总线简介LIN(Local Interconnect Network)是低成本的汽车网络,它是现有的汽车复用网络功能上的补充。
为了获得更多的质量提高和降低成本,LIN将是在汽车中使用汽车分级网络的启动因素。
LIN的标准化将减少重复使用现有的低端复用解决方案,而且将减低汽车电子的开发、生产、服务和后勤成本。
LIN标准包括传输协议规范、传输介质规范、开发工具接口规范和软件编程接口规范。
LIN在硬件和软件上保证了网络节点的互操作性,并能预测EMC。
这个规范包包括了3个主要部分:LIN协议规范部分——介绍了LIN的物理层和数据链路层。
LIN配置语言描述部分——介绍了LIN配置文件的格式。
LIN配置文件用于配置整个网络并作为OEM和各种网络节点供应厂商的通用接口,以及作为开发和分析工具的输入。
LIN API部分——介绍了网络和应用程序之间的接口。
这个概念可以实现开发和设计工具之间的无缝连接,并提高了开发的速度,增强了网络的可靠性。
LIN协会创建于1998年末,最初的发起人为为宝马、Volvo、奥迪、VW、戴姆勒-克莱斯勒、摩托罗拉和 VCT等,五家汽车制造商,一家半导体厂商以及一家软件工具制造商。
该协会将主要目的集中在定义一套开放的标准,该标准主要针对车辆中低成本的内部互联网络(LIN, local interconnect networks),这些地方无论是带宽还是复杂性都不必要用到CAN网络。
LIN标准包括了传输协议的定义、传输媒质、开发工具间的接口、以及和软件应用程序间的接口。
LIN提升了系统结构的灵活性,并且无论从硬件还是软件角度而言,都为网络中的节点提供了相互操作性,并可预见获得更好的EMC(电磁兼容)特性。
LIN补充了当前的车辆内部多重网络,并且为实现车内网络的分级提供了条件,这可以有助于车辆获得更好的性能并降低成本。
LIN协议致力于满足分布式系统中快速增长的对软件的复杂性、可实现性、可维护性所提出的要求,它将通过提供一系列高度自动化的工具链来满足这一要求。
lin总线介绍_lin总线工作原理

lin总线介绍_lin总线工作原理LIN总线是针对汽车分布式电子系统而定义的一种低成本的串行通讯网络,是对控制器区域网络(CAN)等其它汽车多路网络的一种补充,适用于对网络的带宽、性能或容错功能没有过高要求的应用。
LIN总线是基于SCI(UART)数据格式,采用单主控制器/多从设备的模式,是UART中的一种特殊情况。
lin总线工作原理LIN总线所控制的控制单元一般都分布在距离较近的空间,传输数据是单线,数据线最长可以达到40m。
在主节点内配置1k电阻端接12V供电,从节点内配置30k电阻端接12V供电。
各节点通过电池正极端接电阻向总线供电,每个节点都可以通过内部发送器拉低总线电压。
主控制单元LIN主控制单元连接在CAN数据总线上,监控数据传输过程和数据传输速率,发送信息标题,决定何时将哪些信息发送到LIN数据总线上多少次,在LIN数据总线系统的LIN控制单元与CAN总线直接起翻译作用,能够进行LIN主控制单元及与之相连的LIN从属控制单元的自诊断。
主控制单元的信息结构LIN主控制单元控制总线导线上的每条信息的开始处都通过LIN 总线主控单元发送一个信息标题,它由一个同步相位构成,后面部分是标识符字节,可以传输2、4、8个字节的数据。
标识符用于确定主控单元是否会将数据传输给从属控制单元。
信息段包含发送到从属控制单元的信息。
校验区可为数据传输提供良好的安全性。
校验区由主控制单元通过数据字节构成,位于信息结束部分。
LIN总线主控制单元以循环形式传输当前信息。
LIN从属控制单元在LIN数据总线系统内,LIN从属控制单元的通信受到LIN主控制单元的完全控制,只有在LIN主控制单元发出命令的情况下,LIN从属控制单元才能通过LIN 总线进行数据传输。
单个的控制单元、传感器、执元件都相当于LIN从属控制单元,传感器是信号输入装置,传感器内集成有一个电控装置,它对测量值进行分析,分析后的数值是作为数字信号通过LIN总线进行传输的。
lin总线工作原理

lin总线工作原理
LIN总线是一种用于汽车电子控制单元(ECU)之间进行通信的协议。
它基于串行通信方式,用于传输低速信号,并且能够在不需要高带宽或长距离传输的情况下达到可靠的数据传输。
LIN总线的通信由一个主节点和多个从节点组成。
主节点负责控制整个总线的通信过程,而从节点则负责接收和响应主节点发送的消息。
主节点和从节点使用不同的标示符进行通信,从而实现消息的区分。
LIN总线使用一种称为时间分割多路复用(TDM)的方式来实现多节点之间的通信。
在TDM中,总线周期被划分为多个时间槽,每个时间槽对应一个节点的通信时隙。
每个节点只能在自己的通信时隙内发送或接收消息,而在其他节点的通信时隙内则需要保持静默。
在LIN总线中,数据传输使用异步串行通信方式。
每个节点通过发送和接收帧来进行通信。
发送帧由主节点发送,而接收帧则由从节点接收。
每个数据帧由一个标识符、数据和校验位组成。
标识符用于标识消息的发送者和接收者,数据用于传输具体的信息,而校验位用于检测数据传输过程中的错误。
LIN总线还提供了一种错误检测和纠正机制,以确保数据传输的可靠性。
当从节点接收到一个错误的数据帧时,它可以向主节点发送一个错误帧,以通知主节点发送正确的数据。
主节点收到错误帧后,会重新发送正确的数据帧。
总的来说,LIN总线通过TDM方式实现多节点之间的通信,使用异步串行通信方式进行数据传输,并提供错误检测和纠正机制来保证数据传输的可靠性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
LIN总线学习手记1* LIN概况LIN(Local Interconnect Network)是一种面向汽车用低速网络的单主多从、异步串行总线标准,定位于需要互连但不需要强调实时性和可靠性的部件,作为CAN网络的补充和末梢。
目标是以低廉的价格联接车上的传感器、执行器和处理器,并且允许不同厂家的模块随时添加进来。
LIN目前不但用于多种型号的汽车上,而且日益广泛地用在智能传感器领域。
* LIN组织核心成员:5个车厂+1个半导体公司+1个测试工具公司。
A(udi),B(M W),DC(戴克),V(olvo),VW(大众),Freescale和VCT(已并入Mentor Grap hics)。
研、产、测、用一体化,这似乎是现代工业标准化的一种通行道路了。
* LIN规范完全免费。
最新版本是2.0。
2.0与1.3目前都被广泛采用,2.0可以兼容1.3,但反过来不行。
定义完整,对应OSI的下三层。
入门阶段应该掌握下2层。
LIN规范包含6个模块,可以分“接口”、“通信协议”、“软件开发接口”和“开发语言”四个部分。
入门阶段应该掌握“接口”和“通信协议”,了解“软件开发接口”。
* LIN的通信协议基于状态机:FPGA或CPLD基于单片机Bit-Bang方法:就是用IO口线模拟异步串口。
成本最低,但CPU负担最重,代码最多。
SCI+Timer方法:就是利用UART硬件和Timer组合。
成本适中,CPU负担减轻。
专门LIN模块:由功能完备的LIN模块完成通信。
成本较高,CPU负担最轻,代码最少。
* LIN的接口+12V 单端非平衡信号。
最高通信速率20kbps。
主节点输入阻抗1K,从节点30K。
LIN总线学习手记21推荐* LIN的前生今世与来生源自ISO9141;目前是LIN 2.0和1.3并行发展,很快就要兼容24V电源系统;未来可能会变成SAE J2602。
*LIN的竞争对手按照SAE的分类法,10K以下是A类网,125K以上是C类网,中间是B类网。
LIN属于A类和B类的过渡。
低速网络标准从来都是群雄并起,厂商、SAE行会和ISO组织分分合合,天下动荡。
目前比较强势的标准有3:LIN、J2602和TTP/A。
LIN是欧洲车厂主导的标准,J2602则是代表美国车厂利益的简化版LIN2.0(物理层通信速率固定为10.4kbps,诊断接口功能缩减)。
TTP/A是维也纳理工大学提出的,采用TDMA技术,实时性优于LIN,但是应用似乎没有LIN顺利。
值得一提的是,同门的TTP/C是一种可以与CAN竞争的高速网络协议。
LIN总线学习手记3推荐*个人观点:LIN适合国内汽车电子行业国内汽车电子行业的主力我觉得有2,一个是中控锁,另一个是汽车诊断仪。
汽车音响和GPS导航我觉得与汽车关联松散,不能算吧。
中控锁可以借助LIN总线,与电动车窗等捆绑成为一个产品。
汽车诊断仪为了生存,要支持OBD/OBD-II/EOBD,2008后要开始支持ISO15 765。
目前的诊断仪,其物理层和数据链路层仍然是ISO9141-1或者ISO14230 -1之类(看过标准之后发现,除了不能支持24V系统,最高速度限制在20K,其余指标LIN可胜任)。
未来的ISO15765将选择ISO11898规定的CAN作为物理层和数据链路层,那时候,天生作为CAN子网的LIN就体现出它的“嫡系”价值了。
当然,LIN只是定义了OSI的下三层,高层协议是继续使用ISO14230-2/3还是ISO15765-5,需要拭目以待。
BTW,今天登陆LIN协会网站,赫然发现LIN已经升级到2.1了!明天要好好学习一下它,看看比2.0先进多少,嘿嘿。
LIN总线学习手记41推荐* LIN 2.1据LIN协会的说法,LIN 2.1相比2.0,主要的变化有4:1. 明确了LIN2.0中表述不够清晰的概念;2. 取消了诊断接口中的Message Identifier相关服务;3. 物理层指标加严,4. 单独定义传输层。
一些自己总结的差异点:截至第2章体现了诊断标准的进展。
从LIN的引用资料就可以看出来,ISO14229和IS O15765赫然在目。
个人认为这些都是下一代基于CAN的车辆诊断系统的基础标准。
增补术语,部分术语更加准确。
看过LIN 2.0的DIAG和CLS这2部分的人,可能会和我一样对各种各样的identifier不知所云。
仅从PROT来看,LIN 2.1对于这些词汇的限制清楚多了,我想可以帮助理解。
LIN 2.1对那些具有1个以上LIN接口的节点考虑地更多。
体现在术语、通信时序等多个方面。
在阅读PROT时可以感觉到作者的高度,是站在应用层来考虑,以前读LIN 2. 0的时候没有这个感觉。
哈哈,是不是说明我提高了呢?CLS = Configuration Language SpecificationNLS = Node Capability Language SpecificationAPI = Application Program InterfaceDIAG = Diagnostic and Configuration SpecificationPROT = Protocol SpecificationPHY = Physical Layer SpecificationLIN总线学习手记5LIN物理层和很多通信网络一样,LIN采用了层次化的体系结构,真实的通信是由电信号在物理媒体上进行的。
特点●从节点无需高精度时钟源●单线通信●从源头治理EMI问题时钟源确保网络正常通信的方法有两种:一是让所有节点都向同一个时钟源同步并长期维持;二是让少数节点长期维持高精度和高稳定度的时钟,其他节点经常向这些节点同步。
考虑到成本问题,LIN采用了后者。
一个LIN子网只有1个主节点,主节点以“轮询”的方式工作,所有通信总是由主节点发起。
主节点维持一个较精确的时钟,各从节点的时钟精度不高,但都能与主节点取得同步。
规定主机节点、从机节点时钟误差指标时考虑了以下需求:●片上振荡器具有低成本优势,是从机节点的首选,目前其精度可优于±14%。
●同步之前,主机节点按主机波特率发出的13位显性电平,从机节点应可按从机波特率将其解释为不短于11位的显性电平。
这里除了要考虑从机节点对时间的测量误差(固有误差,取决于时钟误差和工作环境),还要考虑从机节点可用波特率与预定波特率的误差(人为误差,取决于硬件结构)。
●同步之后,每传送一个字节(起始位边沿到停止位采样点之间),时钟累积误差不大于1/2比特。
这体现了通信双方波特率的稳定性。
两个从机节点之间通信时(例如无条件帧的应答段),那么双方的时钟误差也应该满足条件:每传送一个字节(起始位边沿到停止位采样点之间),时钟累积误差不大于1/2比特。
通信介质为了兼容现有的ISO9141标准,LIN沿用了单线通信方式。
采用电源参考点作为通信电平参考点。
大多数传感器、执行器至少要接2根电源线,增加LIN功能所付出的成本与获得的灵活性相比,往往后者更为显著。
对于汽车线束而言,由于传感器、执行器的接口可以复用,线束的数量不但不会增加,还可能减少。
单线通信也有不可忽视的弱点——线路压降和参考电平漂移问题。
为此,LIN规范对收发双方的电平鉴别门限各设置了20%的冗余度。
EMI对策通信过程中的EMI主要来自逻辑电平跳变,波特率和压摆率共同决定了EMI能量的大小。
波特率可以视为单位时间内电平变化次数。
压摆率是指电平跳变的持续时间。
在信号摆幅不变的情况下,每次跳变持续时间越短,单位时间跳变次数越多,其包含的谐波成分就越丰富,电磁干扰的能量也越强;相反,跳变持续时间越长,单位时间跳变次数越少,其谐波成分越少,电磁干扰的能量也较低。
不少LIN收发器可以根据LIN的波特率对压摆率进行优化,也可以通过调整总线负载电容和电阻来进一步调整。
LIN协会将LIN的最高波特率限制在20Kbps,SAE J26 02规范则选择了10.4Kbps。
这不是LIN物理层的极限,而是在数据速率与EMI之间权衡的结果。
设计电路时的注意事项工作环境对时钟的影响片上振荡器容易受到环境温度的影响,石英晶体容易受到冲击振动的破坏。
在电路板布局时,要让时钟器件尽量避开热源和易受外力冲击的部位。
在选择时钟源时,一定要考虑使用环境的实际温度范围和冲击振动情况,确保在最恶劣的情况下,也能保证时钟的精度和稳定性。
对于汽车电子产品更是如此。
总线负载与最大节点数量LIN规范规定了主机节点和从机节点的端接电阻。
端接电阻一端连接LIN数据线,另一端通过一个串联的二极管连接收发器的电源。
串联二极管可以防止电源反接。
LIN子网各节点并联在一起,总线负载电阻等于各节点端接电阻的并联等效电阻(总线的导线电阻忽略),总线负载电容等于各节点输入电容和导线分布电容并联等效电容。
为了确保总线的负载电阻和负载电容满足最恶劣情况下正常通信的需要,LIN规范要求一个LIN子网内的最大节点数目不超过16。
兼容性LIN 1.0/1.1/1.2/1.3/2.0/2.1的物理层彼此兼容。
市售LIN收发器LIN的API内容简介API是应用程序接口的缩写。
LIN的API是一套标准化的软件包,用户只需要按照使用要求调用API,就可以实现LIN通信功能。
使用API可以加速LIN节点开发进程。
有了API的帮助,软件设计者不必关心LIN的工作细节,可以集中精力实现节点的功能。
LIN规范并不提供API的完整代码,它只是规定了API的接口和功能。
LIN规范用C语言定义API,用户也可以用其他编程语言编写。
API通常以.lib文件的形式、在编译阶段添加到用户代码中。
API与LIN节点的硬件规格有关,不能简单挪用。
这是由于为了适应不同形式的LIN控制器硬件(SLIC、 SCI和Bit-Bang),API通常会内置硬件驱动程序。
驱动程序针对特定的硬件进行了优化,是API不可分割的组成部分,LIN规范没有对驱动程序进行规定。
这些因素决定了API也与硬件规格有关,不同的硬件平台应使用各自的API。
API的类别LIN的API按照用途可分为3类,分别是核心API、传输层API和节点配置与识别API。
三类API相对独立又彼此关联。
核心API是连接应用层与硬件电路的桥梁,协议层的所有工作都在这里实现,是API的基础。
核心API的功能包括初始化、进度表调度注、帧时隙控制注、信号量读写、报告LIN工作状态注等。
根据对硬件规格的依赖程度,可以把核心API分成功能部分和驱动部分。
功能部分负责实现LIN的进度表调度和帧时隙控制等关键任务,驱动部分即驱动程序(或硬件IP),控制LIN硬件协调工作,实现比特流的正常收发、帧校验、缓存管理和故障检测。