动网格学习方法
移动网格方法及其应用
移动网格方法及其应用移动网格方法是一种在计算和模拟领域中常用的数值方法,它可以有效地解决复杂的物理和工程问题。
移动网格方法通过适应性调整计算网格的形状和大小,以在关注区域内更精确地描述问题的细节。
这种方法在多个领域中都有广泛的应用,如流体力学、结构力学、地质学和气象学等。
移动网格方法的基本原理是根据问题的特性,自适应地移动和调整计算网格。
一方面,它可以在问题的关注区域内加密网格,以提高计算精度。
另一方面,它可以在问题的边界和无关区域内稀疏网格,以减少计算量。
通过这种方式,移动网格方法能够在保持计算效率的同时,提供更准确的结果。
在流体力学领域,移动网格方法被广泛应用于模拟流体的运动和交互。
例如,在飞机设计中,研究人员可以使用移动网格方法来模拟飞机在不同速度和姿态下的气动特性。
通过自适应调整计算网格,可以更准确地捕捉到气动流场中的细节,提供更精确的气动力学参数。
在结构力学领域,移动网格方法也被用于模拟材料和结构的力学行为。
例如,在汽车碰撞模拟中,研究人员可以使用移动网格方法来模拟车辆碰撞时的应力分布和变形情况。
通过适应性调整计算网格,可以更准确地描述车辆结构的细节,提供更精确的碰撞响应预测。
此外,移动网格方法还在地质学和气象学等领域中发挥着重要作用。
在地质学中,它可以用于模拟地下水流动和污染传输等问题。
在气象学中,它可以用于模拟大气环流和天气预报等问题。
通过自适应调整计算网格,可以更准确地描述地下水和大气中的细节,提供更精确的模拟和预测结果。
总之,移动网格方法是一种能够有效解决复杂问题的数值方法。
它通过自适应调整计算网格,提高了计算精度和效率,广泛应用于流体力学、结构力学、地质学和气象学等领域。
随着计算能力的提高和数值方法的发展,移动网格方法将在更多领域中得到应用,并进一步推动科学和工程的发展。
FLUENT_6_动网格技巧
FLUENT 6 动网格技巧一、动网格简介CFD动网格大致分为两类:第一类为显式规定网格节点速度,配合瞬态时间,即可很方便的得出位移,当然一些求解器(如FLUENT)也支持稳态动网格,这时候可以直接指定网格节点的位移。
第二类为网格节点速度是通过求解得到的,如6DOF模型基本上都属于此类,用户将力换算成加速度,然后将其积分成速度。
对于第一类动网格问题,在FLUENT中通常可以使用Profile与UDF进行网格设置,通过规定节点或区域的速度、角速度或位移等方式来显式确定网格的运动,通常大部分的动网格问题都归于此类。
而对于第二类问题,通常涉及到力的计算,力在流体中通常是对压力进行积分而来。
将力转换为速度或位移,一般涉及到加速度、转动惯量等物理量的计算。
在FLUENT中,可以使用6DOF模型进行处理,在CFX中,可以使用刚体模型(13.0以上版本才有)。
在FLUENT中,动网格涉及的内容包括:1)运动的定义。
主要是PROFILE文件与UDF中的动网格宏。
2)网格更新。
FLUENT中关于网格更新方法有三种:网格光顺、动态层、网格重构。
需要详细了解这些网格更新方法的运作机理,每个参数所代表的具体含义及设置方法,每种方法的适用范围。
动网格的最在挑战来自于网格更新后的质量,避免负体积是动网格调试的主要目标。
在避免负网格的同时,努力提高运动更新后的网格质量。
二、第一类动网格操作0打开FLUENT双击桌面快捷方式→ 选择2D或3D模式(FLUENT和GAMBIT默认单位为米)1导入网格文件File → Read → Case → 选择mesh文件2检查网格文件Grid > Check(可以查看网格的大致情况,如有无负体积等)3定义求解器Define → Models → Solver → 在Time项里点选Unsteady(非稳态求解器)4编译UDF文件Define → User-Defined → Functions → Compiled → 单击Add添加UDF文件(*.C)→点击Build按钮→ 点击Load按钮→ 点击Close按钮(如果不关闭编译对话框,在调试程序时可随时对程序进行编译)5设定动网格参数Define → Dynamic Mesh → Parameters→ 勾选Dynamic Mesh> Models(模型)Dynamic Mesh(动网格,默认勾选)In-Cylinder(气缸)2.5DSix DOF Solver(六自由度)> Mesh Methods(网格方法)Smoothing(网格光顺,默认勾选)Layering(动态分层)Remeshing(网格重构)> Smoothing(网格方法)Spring Constant Factor(弹簧常数因子,默认为1)Boundary Node Relaxation(边界节点松弛,默认为1)Convergence Tolerance(收敛容差,默认为0.001)Number of Iterations(迭代次数,默认为20)> Layering(网格方法)Constant Height(固定高度)Constant Ratio(固定比例)Split Factor(分割因子)Collapse Factor(收缩因子)> Remeshing(网格方法)Size Function(尺寸函数)Must Improve Skewness(必须提高扭曲度)Face Remeshing(面网格重构)Minimum Length Scale(最小长度缩放,默认为0)Maximum Length Scale(最大长度缩放,默认为1000)Maximum Cell Skewness(最大单元扭曲度,默认为0.6)Maximum Face Skewness(最大面扭曲度,默认为0.7)Size Remeshing Interval(尺寸重构间隔,默认为10)Size Function Resolution(尺寸函数分辨率,默认为3)Size Function V ariation(尺寸函数变异,默认为1.581787)Size Function Rate(尺寸函数比率,默认为0.3)6设定动网格区域Define → Dynamic Mesh → Zones> Zone Names(在下拉列表里选择要运动的区域或边界)> Type(点选区域或移动边界的类型)Stationary(静止的)Rigid Body(刚体,默认勾选)Deforming(变形)User-Defined(用户自定义)> Motion Attributes(运动属性)Motion UDF/Profile(运动自定义文件,一般UDF文件编译后,会在下拉列表中显示)Center of Gravity Location(全部设置为0)Center of Gravity Orientation(全部设置为0)> Geometry Definition(几何定义,一般不设置)> Meshing Options(网格划分选项)Adjacent Zone(毗邻区域,默认为fluid)Cell Height(单元高度,一般设定为网格单元最小尺寸)→ 单击Create按钮→ 单击Draw按钮→ 单击Update按钮→ 单击Close按钮(这一步非常关键,否则无法预览动态网格)7显示网格Display → Grid(弹出网格显示窗口)8预览动网格Solve → Mesh Motion> Time(时间设置)Current Mesh Times(当前时间,即瞬态运动的时间)Time Step Sizes(时间步长,每个子步的时间)Number of Time Steps(时间步,即总的时间步数)> Display Options(显示选项)Display Grid(显示网格,默认勾选)Save Hardcopy(保存硬拷贝)Enable Autosave(启动自动保存)Display Frequency(显示频率,默认为1)三、第二类动网格操作Number of Iterations(最大迭代步数,在每个时间子步内迭代的次数,即在一个时间步内计算稳态的过程)。
0630滑移网格法

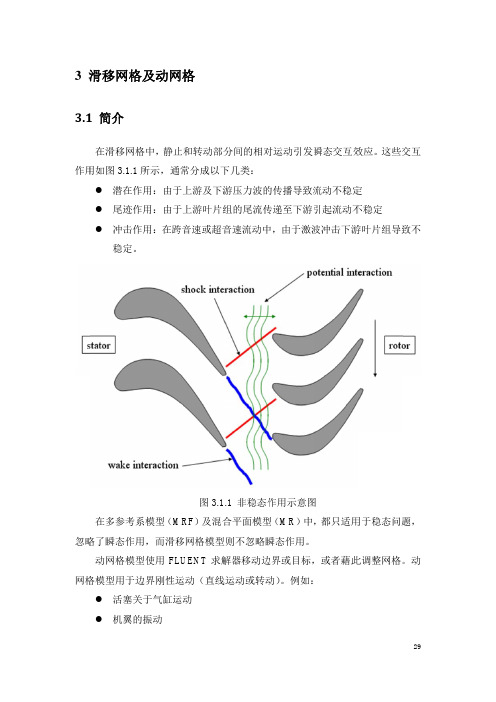
滑移网格法滑移网格法作为众多网格方法中的一种,在CFD 计算方面应用十分广泛,特别是在处理有旋转域的相关问题上。
但是“滑移”在中文的传统意义上是属于“动”的一种,使得很多人将滑移网格法错误的认为是动网格方法的一种。
以下将具体介绍动网格的三种实现-方法,以及滑移网格和滑移网格方法的具体实现步骤。
1 动网格方法动网格可以用来模拟流场形状由于边界运动而随时间改变的问题。
其在商用软件中的应用十分广泛。
-动网格可以分为以下三种:弹簧近似光顺法、动态分层法、局部网格分层法。
1.1 弹簧近似光顺法弹簧近似光顺法近似将网格节点间通过弹簧相连,任意一个网格节点的位移均会打破网格系统的力的平衡,通过反复迭代,得到一个新的网格系统,变化过程中网格总量不变。
但在处理计算域较大变形问题时,误差较大。
1.2 动态分层法动态分层法是根据移动边界的运动规律,在变形区域实时增加或减少网格。
局部网格发生增减。
相对弹簧近似光顺法,可以处理计算域变形较大的问题。
1.3 局部网格分层法局部网格分层法是在弹性光顺法的基础上发展得到的。
在弹性光顺法得到新的网格系统的基础上,删除部分网格并从新生成。
该方法有一个网格拉伸度尺寸标准,弹性光顺法得到的网格满足标准则继续使用原网格,不满足则从新生成。
由上可见,动网格方法在数值模拟计算域形状发生变化的相关问题上具有较好的效果。
但在处理计算域旋转但形状不变的问题上有所不足。
而滑移网格方法可以很好的弥补这一不足。
2 滑移网格法滑移网方法是在计算过程中,移动单元区域沿网格分界面滑动,移动网格区域内部网格保持不变。
这一特点使得其在数值模拟带有旋转区域相关问题时,具有较大的优势。
2.1 滑移网格法实现步骤(1)读取各计算计算域网格,识别转/静交接面;(2)对转/静交界面上的网格节点进行外延,构造滑移边界;(3)找到每个滑移点的宿主单元,并计算对应的插值型函数;(4)进行流场的定常数值计算,达到收敛标准;(5)开始非定常计算,第一个物理时刻t=0;(6)对旋转域进行相应旋转,重新构造滑移边界、宿主单元搜索和插值函数计算;(7)进行第t 个物理时刻计算,直到满足内迭代收敛标准;判断非定常计算是否完成,完成则终止计算;否则开始下一物理时刻t=t+1时刻的计算,返回(6)。
Fluent中的动网格
Fluent中的动网格动网格是目前求解计算域变化问题的常用方法。
参考Fluent帮助,可以知道动网格技术与一般流动计算设置的主要区别在于网格更新方法和更新域设置。
这里就这两方面问题的一点体会作一简单记录。
一、网格更新方法弹簧近似光滑法将任意两网格节点之间的连线理想地看成一条弹簧,并通过近似弹簧的压缩或拉伸实现网格和计算域的改变。
该方法网格拓扑不变,无需网格的插值处理,对结构化(四边形、六面体)和非结构化(三角形、四面体)网格同样适用。
但不适合于大变形情况,当计算区域变形较大时,变形后的网格质量变差,严重影响计算精度。
动态分层法在运动边界相邻处根据运动规律动态增加或减少网格层数,以此来更新变形区域的网格。
该方法适用于结构化网格,通过设置适当的分层和缩减系数,更新后的网格依然为较为均匀的结构化网格,对计算精度影响较小。
对于运动域具有多自由度和任意变形情况,该方法处理起来非常困难。
网格重生方法在整个网格更新区域内依据设定的最大和最小网格尺寸判断需要进行网格重生的网格,并依据设置的更新频率进行网格重生处理。
该方法适用于非结构化网格,能够较好的应用于任意变形的计算区域处理。
二、更新域设置更新域设置是动网格设置中的一项重要工作,最常用的设置是刚体运动域和变形域,这里针对这两种域的设置注意事项和技巧作一简单介绍。
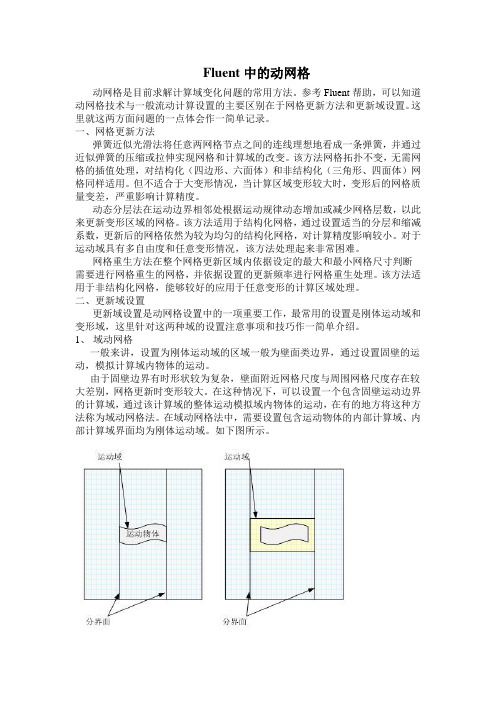
1、域动网格一般来讲,设置为刚体运动域的区域一般为壁面类边界,通过设置固壁的运动,模拟计算域内物体的运动。
由于固壁边界有时形状较为复杂,壁面附近网格尺度与周围网格尺度存在较大差别,网格更新时变形较大。
在这种情况下,可以设置一个包含固壁运动边界的计算域,通过该计算域的整体运动模拟域内物体的运动,在有的地方将这种方法称为域动网格法。
在域动网格法中,需要设置包含运动物体的内部计算域、内部计算域界面均为刚体运动域。
如下图所示。
2、动态分层法中的分界面在应用动态分层网格更新方法时,当分层界面在计算域内部时,需要采用Split interface(这里称分界面)将运动域运动范围与固定计算域区分开来,以保证动态分层网格处理(如果运动域网格与固定域网格没有分界面,动态分层无法执行)。
移动网格方法及其应用共3篇
移动网格方法及其应用共3篇移动网格方法及其应用1移动网格方法及其应用移动网格方法是一种基于时间的离散化方法,用于处理动态网格问题。
它是在传统网格方法基础上发展而来的,对于处理曲线和曲面等复杂几何体和流体运动问题具有很好的效果。
由于其可以在处理网格中动态添加或删除网格点,所以能够大大提高计算效率和精度,被广泛应用于流体力学、结构力学、人工智能等领域。
移动网格方法最基本的思想是将要解决的复杂问题分解成无数个较为简单的小问题进行求解,然后再把这些小问题组合在一起。
针对不同的物理问题,可以采用不同的网格规律。
为了使移动网格方法更加高效,可以在网格中嵌入其他算法,例如基于树的多级静态网格算法、基于稳定性的失笼技术等。
在流体力学中,移动网格方法是一种比较常用的数值计算方法。
它可以很好地处理复杂几何体内的流动现象,如弯管、尖锐物体等。
同时,移动网格方法在边界条件处理方面也有一定的优势,能够自动适应以及处理复杂边界,避免移动边界带来的边界条件更新问题。
基于移动网格方法的振荡器自可控平衡(OSC)引发了强烈的兴趣,它可以模拟OSC产生的不同模态。
除此之外,移动网格方法在其他领域也具有广泛的应用。
例如在结构力学中可以用于求解离散化问题、在人工智能中可以用于机器学习中的卷积神经网络处理问题、在大气科学中可以用于求解混合积分方程组等。
总之,移动网格方法是一种有效解决动态网格问题的方法,它可以很好地处理流体力学、结构力学和人工智能等领域中的问题。
随着计算机技术的不断提高和人们对于精度、效率的不断追求,相信移动网格方法将会得到越来越广泛的应用移动网格方法是一种广泛适用的数值计算方法,可以有效地解决动态网格问题,特别适用于解决流体力学、结构力学和人工智能等领域中的问题。
随着计算机技术不断提高,移动网格方法将会得到越来越广泛的应用。
未来,我们可以期待该方法在更多学科领域的发展和应用,为解决实际问题带来更多的便利和突破移动网格方法及其应用2移动网格方法及其应用随着科技的不断发展,人们对于数据分析的需求也日益增长。
动网格参数图解
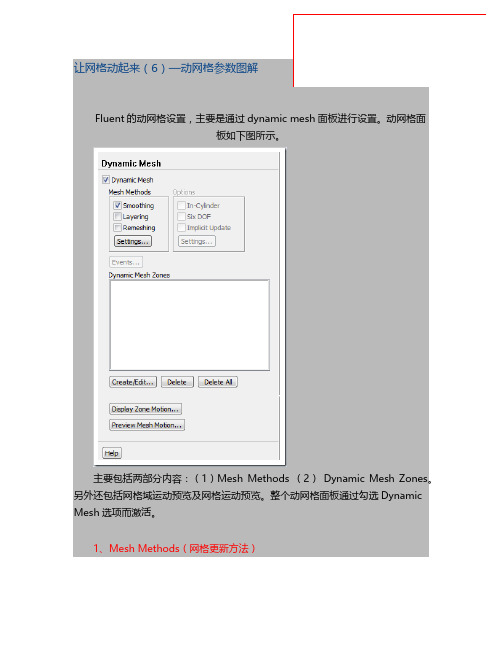
主要包括两部分内容:(1)Mesh Methods (2)Dynamic Mesh Zones。
该部分主要用于网格或网格域在运动过程中,设置计算域中网格节点位置更新方法。
fluent中有三种主要网格更新方法:(1)网格光顺方法(2)动态层方法(3)网格重构。
对于3D模型,还包括in-cylinder、six-dof、Implicit Update
三种选项。
其中in-cyliner用于发动机气缸模拟,six-dof主要用于流体作用于刚体,预测刚体运动。
implicit update用于设定网格更新方式。
默认采用显式方式,勾选此选项可设定网格以隐式方式更新。
2、动态网格域
用于定义网格运动的区域及运动类型。
FLUENT中网格运动类型主要有:静止、刚体运动、变形区域、用户自定义域、耦合域。
静止域在网格运动过程中,区域内节点位置保持不变。
虽然说默认情况下不设定区域运动,则该区域为静止,但是一些情况下还是需要显式设定某些区域为静止域,尤其是在一些与刚体域相连的区域处理上。
刚体运动域:这是fluent动网格中最常见的运动类型。
通过规定刚体的速度或位移来控制运动。
变形域:由于边界运动导致节点变形。
变形域通常与刚体域是相连的。
自定义域:用户可以使用UDF定义自己需要的域
耦合域:节点位移由耦合求解器计算,在流固耦合计算中,耦合面上通常设定为耦合域类型。
Fluent理论手册3—滑移网格及动网格理论
− 转捩模型
4.7:SST 转捩模型 4.8: − 模型
4.9:雷诺应力模型(RSM) 4.10:分离涡模型(DES) 4.11:大涡模拟模型(LES) 4.12:壁面边界湍流流动的近壁处理
更多关于 ANSYS FLUENT 中湍流模拟的资料, 可以查看用户手册第 12 章: 湍流模拟。
4.1 简介
例如仅有转子作用时如图态近似感兴时必须采动参考系问题也就是说周瞬态类型包子使用旋图322兴趣则可以31采用周期包括旋转323以使32要在位置要使32直线滑移网滑移网格在计算开始一个计算区成网格分在计算中图324分界面上使用瞬态分网格分网格交界线327图322转子网格技术格技术使用两始前将网格文域与其相邻分界的形式一个计算及325上网格并不需分析
湍流流动通过速度场波动进行表征。这些脉动混合诸于动量、能量及组分浓 度等标量方程, 引起传输量的脉动。 由于这些脉动存在于小尺度, 且频率非常高, 因此对其进行直接模拟非常消耗计算资源。
37
图 3.2. .8 3D 圆锥网格交界面 面 对于轴向转子/定子结构,转动 动及静止部 部分对齐于轴 轴线,分界 界面可能为平 平面 形。此面为 为垂直于沿着 着静子至转 转子的旋转轴 轴向的横截 截面。 扇形
33
图 3.2.9 9 3D 平面扇 扇形网格界面 面
3.2.3 滑移网 网格概念
如 3.2 节: :滑移网格 格理论中所讨 讨论,滑移 移网格模型允 允许相邻网 网格相对于其 其他 网格 格滑动。在这 这种情况下 下,网格面不 不需要在网 网格分界面上 上对齐。这 这种条件需要 要对 穿过 过两个非保 保角区域分界 界面的通量 量进行计算。 更多的关于 于 ANSYS FLUENT 中非 中 保角 角界面信息,查看用户 户手册 6.4 节 节:非保角 角网格。
动网格
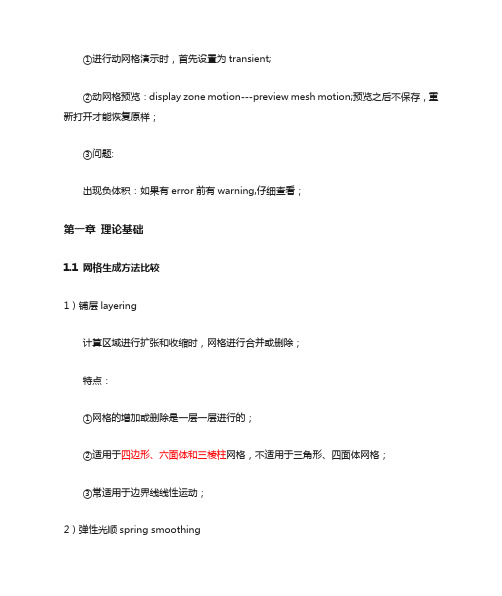
①进行动网格演示时,首先设置为transient;②动网格预览:display zone motion---preview mesh motion;预览之后不保存,重新打开才能恢复原样;③问题:出现负体积:如果有error前有warning,仔细查看;第一章理论基础1.1 网格生成方法比较1)铺层layering计算区域进行扩张和收缩时,网格进行合并或删除;特点:①网格的增加或删除是一层一层进行的;②适用于四边形、六面体和三棱柱网格,不适用于三角形、四面体网格;③常适用于边界线线性运动;2)弹性光顺spring smoothing计算区域进行扩张和收缩时,网格和节点像弹簧一样被拉伸和压缩(接近运动的地方压缩严重);特点:①节点数量和链接关系不发生变化;②如果变形幅度过大,网格会高度扭曲;③适用于三角形、四面体网格,也适用于四边形、六面体和三棱柱网格;3)局部重构local remeshing计算区域进行扩张和收缩时,会自动重构扭曲或尺寸过大的网格,以满足要求;①节点的数量和链接关系会发生变化;②适合大变形、大位移;仅使用与三角形网格和四面体网格;③常和spring smoothing联合使用;1.2 边界运动1.2.1 in-cylinder对于类活塞运动,fluent集成了气缸(in-cylinder)模型;dynamic mesh---option---in cylinder;1)常用参数Crank radius:曲柄半径;connecting rod length:连杆半径;(1)通过设置起始、终止角度、曲柄、连杆半径,调整指定边界运动范围;设置crank angle step size,调整边界运动速度;设置起始、终止角度、piston axis方向,调整边界运动的方向;2)指定运动区域Dynamic mesh zones---creat/edit;Zone name---选择gambit中指定的运动边界;Type---rigid body;Motion attributes---选择piston-full(motion udf/profile)---指定活塞轴方向(piston axis);设置h_ideal(meshing option---cell hight);1.2.2 profile对于预先指定的运动,可用profile来描述;1)define---profile---read;后缀名为prof;1.2.3 六自由度模型对于物体运动和流体作用力耦合的计算问题,可以使用六自由度模型;1.2.4 udf1.3 变形的指定1.3.1 deforming1)边界上的节点,默认情况下是静止的(既不弹性光顺也不局部重构);在smoothing时,如果将边界设置为deforming,则边界上的节点会做类似内部节点的运动和生成;2)deforming的变形形式(1)面板中只能定义cylinder和plane类型的变形;如果边界复杂,则需要用DEFINE_GEOM来定义形状;①cylinder:2d:轴不能是z轴,其实成了一个矩形,定义的边界沿着两条直线变形;(2)对于边界沿直线变化,用layering时不需要定义deforming;但是沿曲线变化则需要用deforming的udf(如扇形网格中的圆弧);3)变形原理第二章铺层2.1 参数设置Hight based:铺层形成的网格在同一层内高度相同;Ratio based:同一层网格高度可能不同,但是不同位置处不同层网格高度比相同(移动边界为斜直线或曲线时常常出现);Split factor:相邻网格的高度为h_ideal,当网格高度h > (1 + split factor) * h_ideal 时,一层网格被分成两层网格;Collapse fator:当网格高度h < collapse factor * h_ideal时,该层网格与相邻网格层合并;2.2 运动形式1)静止stationary2)刚体运动rigid body motion3)变形deforming4)用户自定义user-defined2.3 区域优先级1)运动优先级静止区域:高;面区域:中;单元区域:低;2)以活塞向上运动为例活塞边界(wall_down)为面区域,fluid为单元区域;如果指定wall_down为rigid body,则网格在wall_down运动的地方进行铺层;如果指定fluid(或者interior和其他边界)为rigid body,指定wall_up为stationary,则网格在顶部进行铺层;2.4 边界条件的继承性第三章弹性光顺3.1 参数3.1.1 convergence tolerance(收敛容差)1)收敛容差和迭代步数,默认值在一般情况下都比较适用;2)在迭代过程中,节点当前一次迭代位移与第一次迭代位移之比作为收敛控制参数,当其小于设定的收敛容差时,迭代停止;在一定迭代步内不能达到规定的收敛容差,也需要停止迭代,防止死循环;3.1.2 spring constant factor弹性常数主要控制内部节点相对于运动边界的位移变形;范围0-1;默认为1,此时网格在活塞(运动边界)变形明显,远离活塞变形不明显,网格仅局部变化,插值过程少,但是网格拉伸扭曲大时,也会影响计算精度;为0时,运动边界几乎影响到所有边界,网格全局变化,需要全局插值,影响计算精度;3.1.3 laplace node relaxation节点松弛因子:内部节点位移对变形边界(deforming)节点位移的影响程度;范围0-1;默认1;先在dynamic mesh zones---meshing option---smoothing methord---laplace,然后在smoothing设置该参数才会起作用;为1,内部节点充分影响到变形边界节点运动;为0,不影响,相当于没有设置deforming变形;3.2 smoothing用于其它类型网格Smoothing一般用于三角形和四面体网格,但也可以用于其他类型的网格;设置:mesh method---setting---smoothing---parameters---element---all;第四章局部重构4.1 remeshing基本特点1)当网格的扭曲率或者尺寸超过用户规定范围时,网格被重构;2)适用于三角形和四面体网格,网格节点和数量都发生改变;3)remeshing一般和smoothing结合使用;4)适用于大位移大变形,比如转动和平动结合的运动;4.2 remeshing算法4.2.1 remeshing算法流程1)标记网格参数:Minimum length scale,maxmum length scale,maxmum cell skewness;标记出尺寸超出最小最大范围的网格,以及扭曲率超过给定值的网格;Size remeshing interval:每几个时间步进行一次网格重构;Mesh cell info可以查看当前网格的信息;2)标记的网格被删除形成空穴;3)求解器使用一系列重构方法,进行区域填充;4)将物理量在重构的网格上进行插值;4.2.2 算法1)面网格重构:(1)Region face remeshing:区域面网格重构;一般定义最小网格尺度是平均尺度的0.4倍,最大尺度是平均尺度的1.4倍;(2)local face remeshing:局部面网格重构;完全基于网格的扭曲率;不能重构那些同时属于多个变形区域的面网格;设置:首先mesh moethods---setting---选中local face---设置face skewness;然后dynamic mesh zones---meshing option---remeshing method---勾选local;(3)2.5Dface remeshing:2.5维度面网格重构;见例9,虽然是三维网格,但是重构仅仅涉及一对表面,故为2.5d;设置:Remeshing---2.5d---设置参数即可;对于2.5为cell hight没什么用;4.2.3 remeshing参数1)Size remeshing interval(SRI):通过网格尺寸控制网格重构的频率;每一个时间步,fluent都会根据扭曲率进行标记网格,并决定是否重构:如果扭曲率超标,进行重构;如果扭曲率不超标,且达到SRI的间隔,且最小最大尺寸超标,则也进行重构;网格扭曲率对计算的影响大于网格尺寸;SRI较大时,网格重构主要受扭曲率控制,SRI较小时,网格重构受扭曲率和尺寸共同控制;2)maxmum cell skewness二维:0.6-0.7;三维:0.85;4.3 其它4.3.1 时间步长动网格预览时的时间步长的选取:1)基于网格尺寸和运动速度:Deta_t < min_scale / max_velocity;4.3.2 算法技巧动网格的时间步长要足够小,每一次移动网格应该小于最小网格尺寸的一半;光顺方法的结合可以适当增加时间步长;如果移动幅度已知,最好将区域划分,减少计算;4.4 sizing function尺寸函数4.4.1 说明1)功能:尺寸函数用于控制重构过程中网格的分布,使网格变化更加均匀;尺寸函数在运动边界处约束网格,使其维持在一个较小的尺度,在远离运动边界处,逐步将其增大;运用尺寸函数时,fluent自动标记出网格尺度大于当地尺寸函数值的网格;尺寸函数仅用于网格标识,并不在重构过程中控制网格尺寸;2)fluen重构网格步骤(1)标记扭曲率大于maximum cell skewness的网格;(2)如果time = SRI * deta_t,标记出长度尺度小于minmum scale length和大于maxmum scale length的网格;(3)如果打开了sizing function,标记出不满足当地尺寸函数的网格;(4)对标记网格进行重构;(5)如果打开了smoothing(推荐打开),进行光顺;4.4.2 参数1)resolution:分辨率,控制背景网格的密度;variation:变化量,最大允许网格尺度的量度;Rate:变化率,网格成长率的量度;rate=0,意味着线性增长,rate越大,表明边界处网格生长越慢,内部网格生长越快;2)设置fluent会自动生成variation和rate,默认参数就行;4.4.3 技巧1)以等高线显示尺寸函数分布:初始化流场---输入:/solve/set/expert---keep temporary memory be freed?[no]yes(这一个打开,其它全为no)---graphics and animation---countours---adaption---background size function;4.4.4 原理1)[me]fluent将当前网格边长代入尺寸函数进行计算,如果大于标准值,则标记出来;标准值:由标准网格尺寸代入求解;标准尺寸deta_s:二维,与网格等面积的三角形网格边长;三维,等体积的四面体边长;第五章其它5.1 耦合运动6DOF5.1.1 概念用in-cylinder或者profile定义的运动一般是预知的;而6DOF求解器可以计算运动与流场耦合的运动5.2.2 设置1)原理6DOF是将每一个时间步的速度角速度进行积分得到当前位置和角度的;2)设置首先:在dynamic mesh中勾选6DOF---setting设置重力加速度;然后:rigid body---motion attributes---six DOF option勾中on;第十章网格实例10.1 油缸1)设置底边为rigid body:网格在底边生成和销毁;10.2 箱体移动1)设置fluid和箱体为rigid body,左右边界为stationary:网格在左右边界生成和销毁;10.3 子弹移动设置下面流域和子弹体为rigid body;最左右侧边界设为stationary;网格在左右侧产生和销毁;设置子弹体为rigid body:网格在子弹体左右产生和销毁(不利于计算);10.4 扇形网格扇形网格铺层:定义右下边界为rigid body,用profile文件定义其转动角速度;定义内外圆弧为deforming,用udf中define_geom定义其上节点在圆上进行节点位置更新;①udf:sector.c: DEFINE_GEOM();10.5 油缸弹性Smoothing网格光顺;左右边界设置为deforming;下边界设置为rigid body;10.6 箱体振动Smoothing其他类型网格;Box设置为rigid body;10.7 投弹Remeshing + smoothing;设置边界层为regid body(边界层自动包含弹体边界);之前出现负网格,是因为指定单体边界运动,而周围边界层网格为四边形不能remeshing;①如果用6DOF:弹体和fluid_bondary_layer都设置为rigid body,并且在fulid_bondary_layer打开6DOF时,选中passive;②udf:6DOF_missile_drop.c:DEFINE_SDOF_PROPERTIES()10.8 活塞Remeshing---region face + smoothing;底面设置rigid body,圆柱侧面设置为deforming---cylinder;10.9 2.5D设置内外表面为rigid body;用profil文件定义旋转,方向相反(设置一个转动即可);设置上下表面为deforming---plane,上表面的meshing method中勾选remeshing,下表面的不勾选remeshing,因为下表面是由上表面拉伸过去的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
题记:在学习使用Fluent的时候,有不少朋友需要使用动网格模型(Dynamic Mesh M odel),因此,本版推出这个专题,进行大讨论,使大家在使用动网格时尽量少走弯路,更快更好地掌握;也欢迎使用过的版友积极参与讨论指导,谢谢!该专题主要包括以下的主要内容:§一、动网格的相关知识介绍;§二、以NACA0012翼型俯仰振荡实例进行讲解动网格的应用过程;§三、与动网格应用有关的参考文献;§四、使用动网格进行计算的一些例子。
§一、动网格的相关知识介绍有关动网格基础方面的东西,请具体参考FLUENT User’s Guide或FLUENT全攻略的相关章节,这里只给出一些提要性的知识要点。
1、简介动网格模型可以用来模拟流场形状由于边界运动而随时间改变的问题。
边界的运动形式可以是预先定义的运动,即可以在计算前指定其速度或角速度;也可以是预先未做定义的运动,即边界的运动要由前一步的计算结果决定。
网格的更新过程由FLUENT 根据每个迭代步中边界的变化情况自动完成。
在使用动网格模型时,必须首先定义初始网格、边界运动的方式并指定参予运动的区域。
可以用边界型函数或者UDF 定义边界的运动方式。
FLUENT 要求将运动的描述定义在网格面或网格区域上。
如果流场中包含运动与不运动两种区域,则需要将它们组合在初始网格中以对它们进行识别。
那些由于周围区域运动而发生变形的区域必须被组合到各自的初始网格区域中。
不同区域之间的网格不必是正则的,可以在模型设置中用FLUENT软件提供的非正则或者滑动界面功能将各区域连接起来。
注:一般来讲,在Fluent中使用动网格,基本上都要使用到UDF,所以你最好具备一定的C语言编程基础。
2、动网格更新方法动网格计算中网格的动态变化过程可以用三种模型进行计算,即弹簧近似光滑模型(spr ing-based smoothing)、动态分层模型(dynamic layering)和局部重划模型(local reme shing)。
弹簧近似光滑模型原则上弹簧光顺模型可以用于任何一种网格体系,但是在非四面体网格区域(二维非三角形),最好在满足下列条件时使用弹簧光顺方法:(1)移动为单方向。
(2)移动方向垂直于边界。
如果两个条件不满足,可能使网格畸变率增大。
另外,在系统缺省设置中,只有四面体网格(三维)和三角形网格(二维)可以使用弹簧光顺法,如果想在其他网格类型中激活该模型,需要在dynamic-mesh-menu 下使用文字命令spring-on-all-shapes?,然后激活该选项即可。
动态分层模型动态分层模型的应用有如下限制:(1)与运动边界相邻的网格必须为楔形或者六面体(二维四边形)网格。
(2)在滑动网格交界面以外的区域,网格必须被单面网格区域包围。
(3)如果网格周围区域中有双侧壁面区域,则必须首先将壁面和阴影区分割开,再用滑动交界面将二者耦合起来。
(4)如果动态网格附近包含周期性区域,则只能用FLUENT 的串行版求解,但是如果周期性区域被设置为周期性非正则交界面,则可以用FLUENT 的并行版求解。
如果移动边界为内部边界,则边界两侧的网格都将作为动态层参与计算。
如果在壁面上只有一部分是运动边界,其他部分保持静止,则只需在运动边界上应用动网格技术,但是动网格区与静止网格区之间应该用滑动网格交界面进行连接。
局部网格重划模型需要注意的是,局部网格重划模型仅能用于四面体网格和三角形网格。
在定义了动边界面以后,如果在动边界面附近同时定义了局部重划模型,则动边界上的表面网格必须满足下列条件:(1)需要进行局部调整的表面网格是三角形(三维)或直线(二维)。
(2)将被重新划分的面网格单元必须紧邻动网格节点。
(3)表面网格单元必须处于同一个面上并构成一个循环。
(4)被调整单元不能是对称面(线)或正则周期性边界的一部分。
动网格的实现在FLUENT 中是由系统自动完成的。
如果在计算中设置了动边界,则FLUE NT 会根据动边界附近的网格类型,自动选择动网格计算模型。
如果动边界附近采用的是四面体网格(三维)或三角形网格(二维),则FLUENT 会自动选择弹簧光顺模型和局部重划模型对网格进行调整。
如果是棱柱型网格,则会自动选择动态层模型进行网格调整。
在静止网格区域则不进行网格调整。
动网格问题中对于固体运动的描述,是以固体相对于重心的线速度和角速度为基本参数加以定义的。
既可以用型函数定义固体的线速度和角速度,也可以用UDF 来定义这两个参数。
同时需要定义的是固体在初始时刻的位置。
注:这一小节主要讲述了动网格的更新方法,最好能掌握,尤其是各种方法的适用范围,通常来讲,在一个case中,我们使用的更新方法都是根据网格类型以及和要实现的运动来选择的,很多时候都是几种更新方法搭配起来使用的。
总结一下:使用弹簧近似光滑法网格拓扑始终不变,无需插值,保证了计算精度。
但弹簧近似光滑法不适用于大变形情况,当计算区域变形较大时,变形后的网格会产生较大的倾斜变形,从而使网格质量变差,严重影响计算精度。
动态分层法在生成网格方面具有快速的优势,同时它的应用也受到了一些限制。
它要求运动边界附近的网格为六面体或楔形,这对于复杂外形的流场区域是不适合的。
使用局部网格重划法要求网格为三角形(二维)或四面体(三维),这对于适应复杂外形是有好处的,局部网格重划法只会对运动边界附近区域的网格起作用。
3、动网格问题的建立设置动网格问题的步骤中需要注意的如下:在Solver(求解器)面板中选择非定常流(unsteady)计算;设定边界条件,即设定壁面运动速度;激活动网格模型,并设定相应参数;指定移动网格区域的运动参数;保存算例文件和数据文件;预览动网格设置,菜单操作为:Solve -> Mesh Motion...;应用自动保存功能保存计算结果,在动网格计算中,因为每个计算步中网格信息都会改变,而网格信息是储存在算例文件中的,所以必须同时保存算例文件和数据文件;如果想建立网格运动的动画过程,可以在Solution Animation(计算结果动画)面板中进行相关设置。
注:在这一步中,需要提醒一下,使用动网格进行正式计算之前,最好养成预览动网格更新的习惯;就是在正式计算前,浏览一下动网格的更新情况,这样可以避免在计算过程中出现动网格更新本身的问题。
在预览更新时,很多人都说会出现负体积的警告,更新不成功,出现这样的问题时,最好先把时间步长改的更小点儿试试,一般来讲,排除UDF本身的原因,出现更新出错的原因都与时间步长有关,这需要结合所使用的更新方法多琢磨。
4、设定动网格参数为了使用动网格模型,需要在dynamic mesh(动网格)面板中激活Dynamic Mesh(动网格)选项。
如果计算的是活塞运动,则同时激活In-Cylinder(活塞)选项。
然后选择动网格模型,并设置相关参数。
1)选择网格更新模型在Mesh Methods(网格划分方法)下面选择Smothing(弹簧光顺模型),Layering (动态层模型)和(或)Remshing(局部网格重划模型)。
2)设置弹簧光顺参数激活弹簧光顺模型,相关参数设置位于Smoothing(光顺)标签下,可以设置的参数包括Spring Constant Factor(弹簧弹性系数)、Boundary Node Relaxation(边界点松弛因子)、Convergence Tolerance(收敛判据)和Number of Iterations(迭代次数)。
弹簧弹性系数应该在0 到1 之间变化,弹性系数等于0 时,弹簧系统没有耗散过程,在图中算例中,靠近壁面的网格没有被改变,而是保持了原来的网格形状和密度;在弹性系数等于1 时,弹簧系统的耗散过程与缺省设置相同,从图中可以发现壁面发生变形,壁面附近网格因为过度加密而质量下降。
因此在实际计算中应该在0 到1 之间选择一个适当的值。
边界点松弛因子用于控制动边界上网格点的移动。
当这个值为零时,边界节点不发生移动;在这个值为1 时,则边界节点的移动计算中不采用松弛格式。
在大多数情况下,这个值应该取为0 到1 之间的一个值,以保证边界节点以合适的移动量发生移动。
收敛判据就是网格节点移动计算中,迭代计算的判据。
迭代次数是指网格节点移动计算的最大迭代次数。
3)动态分层在Layering(动态分层)标签下,可以设置与动态层模型相关的参数。
通过设定Const ant Height(常值高度)与Constant Ratio(常值比例)可以确定分解网格的两种方法。
S plit Factor(分割因子)和Collapse Factor(合并因子)则分别为上面介绍的alpha_s和a lpha_c。
4)局部网格重新划分网格在Remeshing(重划网格)标签下,设置与局部重划模型相关的参数。
可以设置的参数包括Maximum Cell Skewness(最大畸变率)、Maximum Cell Volume(最大网格体积)和Minimum Cell Volume(最大网格体积),其含义如前所述,主要用于确定哪些网格需要被重新划分。
在缺省设置中,如果重新划分的网格优于原网格,则用新网格代替旧网格;否则,将保持原网格划分不变。
如果无论如何都要采用新网格的话,则可以在Options(选项)下面选择Must Improve Skewness(必须改善畸变率)选项。
如果Options(选项)下面的Size Function(尺寸函数)被激活,则还可以用网格尺寸分布函数标志需要重新划分的网格。
假设在某点附近的理想网格尺寸为L ,而某个网格的尺寸为L' ,如果:L’不属于[0.8*gamma*L,1.25*gamma*L]则网格被标志为需要重新划分的网格,并在随后的计算中被重新划分。
式中的gamma 用下面的公式计算:当alpha>0时,gamma=1+alpha*d_b^(1+2*beta)当alpha<0时,gamm a=1+alpha*d_b^[(1-beta)^-1]式中d_b为网格到壁面边界的最小距离,alpha和beta就是需要设置的Size Function Variation(尺寸函数增量)和Size Function Rate(尺寸函数变化率)。
以上两式中,alpha以边界网格尺寸为基准控制内部网格的大小,alpha等于0.5表示内部网格的尺寸至少是边界网格的1.5倍,alpha等于-0.5表示内部网格的尺寸等于边界网格的0.5倍,如果alpha等于0则表示内部网格与边界网格大小相同;bata的取值在-1到1之间,用于控制网格从边界到内部区域的变化速率。
Beta取正值表示网格变化速率较慢取负值则表示变化速率较快,取0 则表示网格从边界到内部区域呈线性变化。