第四讲,频率响应
控制工程4频率响应分析

对数坐标图(伯德图)
对数坐标图(伯德图)
5 二阶振荡标图(伯德图)
6 延迟环节
对数坐标图(伯德图)
对一般系统
则
对数坐标图(伯德图)
对数坐标图(伯德图)
即
该系统可认为由下列五个典型环节组成:
对数坐标图(伯德图)
该系统的伯德图如下图所示:
对数坐标图(伯德图)
频率响应分析
主讲:尹中会 安徽理工大学机械学院 2012.02.06
Chap. 4 FREQUENCY RESPONSE ANALYSES 时域瞬态响应法:分析控制系统的直接方法。
优点:直观。
缺点:分析高阶系统非常繁琐。
Chap. 4 FREQUENCY RESPONSE ANALYSES 频率响应是时间响应的特例,是控制系统对 正弦输入信号的稳态响应。
由此,可以看出伯德图可由如下步骤形成:
(1)将系统频率特性化为典型环节频率特性的 乘积; (2) 根据组成系统的各典型环节确定转角频率 及相应斜率,并画近似幅频折线和相频曲线; (3) 必要时对近似曲线作适当修正。 真正画伯德图时,并不需要先画出各环节伯德 图,可根据静态放大倍数和各环节时间常数直 接画出整个系统伯德图。
绘制奈奎斯特图的一般方法 Common method of sketching Nyquistplots
4.2 极坐标图
4.2 极坐标图
4.2 极坐标图
4.2 极坐标图
4.2 极坐标图
4.2 极坐标图
系统的型次
4.2 极坐标图
4.2 极坐标图
乃氏图的高频段
4.2 极坐标图
小结
4.2 极坐标图
不必直接求解系统输出的时域表达式,可以间 接地运用系统的开环频率特性去分析闭环系统 的响应性能,不需要求解系统的闭环特征根。 系统的频域指标和时域指标之间存在着对应关 系。频率特性分析中大量使用简洁的曲线、图 表及经验公式,使得控制系统的分析十分方便、 直观
频率响应分析法

机 械 控 制 理 论
1)利用在已知系统的微分方程或传递函数的情 况下,当输入为正弦函数时,求其稳态解,再 求G(jw) 2)利用将传递函数中的s换为jw来求取 3)实验法:是对实际系统求取频率特性的一种 常用而又重要的方法。如果在不知道系统的传 递函数或数学模型时,只有采用实验法。
第四章 频率响应分析法
积分环节的对数幅频图为一条直线,此直线的斜率 为–20dB/dec,对数相频图为等于-90o的一条直线。
第四章 频率响应分析法
3)理想微分环节
传递函数: G ( s ) s
机 械 控 制 理 论
j / 2 频率特性: G ( j ) j e
幅频特性: A( ) 相频特性: ( ) 90 实频特性: P ( ) 0 虚频特性: Q ( )
2
第四章 频率响应分析法
2 n
1 n
2
机 械 控 制 理 论
( ) arctg
易知:
(0) 0
( n ) 90
() 180
第四章 频率响应分析法
6)延迟环节
机 械 控 制 理 论
传递函数: G ( s括对数幅频特性曲线和对数相频特性曲线。
两条曲线的纵坐标均按线性分度,横坐标是角速率 ,采用半对数 分度(为了在一张图上同时能展示出频率特性的低频和高频部分,即
在较宽的频率范围内研究系统的频率特性)。
第四章 频率响应分析法
优点
机 械 控 制 理 论
①幅频特性的乘除运算转变为加减运算。
第四章 频率响应分析法
4-1 频率特性
机 械 控 制 理 论
频率响应
系统对正弦输入信号的稳态响应。
自动控制原理第四章 频率响应法xin

则 lim C (t ) =
t →∞
A w T +1
2 2
sin (wt − arctgwT )
稳态输出 = A
与输入r (t ) = A sin wt
1 1 sin wt + ∠ jwT + 1 jwT + 1
(1)同:频率相同 幅值 比较: (2)不同:
⋅ 10 ⋅ L(w)dB 0 − 1 ⋅ 0.1 − 10⋅ − 20 ⋅
20
⋅ 1
0
1 10
⋅
2 100
⋅ w
lg w
ϕ (w)(°) 0 − 1
− 90° 0.1 −180°
⋅ ⋅
⋅
⋅ 1
0
1 10
Байду номын сангаас
⋅
2 100
⋅ w
lg w
(Π )举例画法:
画出G (S ) = 1 的Bode图 TS + 1 L(w)dB 10 1 1 − j ( arctgwT ) 解:G ( jw) = = e 2 2 jwT + 1 1+ w T 0 = 20 lg 1 1 + w2T 2
ϕ (w)由0° → −90°
1 5T
1 2T
1 T
2 T
5 T
10 T
w
20 T
工程上常用折线来绘制近似对数幅频特性曲线: 1 当w << 即wT << 1 则L(w) = −20 lg 1 + w2T 2 ≈ −20 lg 1 = 0dB T 即低频区可近似与横轴相重合 1 当w >> 即wT >> 1 则L(w) = −20 lg 1 + w 2T 2 ≈ −20 lg w 2T 2 = −20 lg wTdB T 1 w = 时,−20 lg wT = −20 lg 1 = 0dB T w每上升10倍,−20 lg wT下降20dB. 10 w = 时,−20 lg wT = −20 lg 10 = −20dB 故 − 20 lg wT为一条斜率为 T 10 2 2 − 20dB / 10倍频程的直线 w= 时,−20 lg wT = −20 lg 10 = −40dB T n 10 w= 时,−20 lg wT = −20 lg 10 n = n(− 20 )dB T 1 渐近幅频的最大误差在转折点w = 处, 误差为3dB. T 2 2 − 20 lg wT 即− 20 lg 1 + w T 1− 1 = −20 lg 2 + 20 lg 1 ≈ −3dB w= w= T T
《频率响应法》课件

频率响应法实践案例
音箱设计
通过频率响应法来分析音箱的 特性,优化音箱的设计,使其 在各个频率下都能提供清晰、 平衡的声音。
均衡器调校
使用频率响应法来分析音频系 统中的均衡器效果,通过调整 不同频段的增益实现音频的优 化。
房间声学矫正
通过频率响应法来分析房间的 声学特性,调整音频设备的配 置和位置,改善音质。
使用频率响应法的步骤
1
准备测试设备
选择一个合适的信号发生器和频率响
设置频率范围
2
应测试设备,确保测试环境的准确性。
根据系统的特性和需求,设置合适的
频率范围,涵盖关键频段。
3
记录测量结果
使用测试设备测量不同频率下的输入 输出信号,记录幅度和相位的测量结 果。
频率响应法的优势和局限性
优势
高精度的频率分析,能够提供详细的系统性 能特征。
局限性
测试环境对结果产生影响,需要严格控制测 试条件。
常见的频率响应法工具
1 频率响应分析仪
用于测量输入输出信号的幅度和相位,生成频率响应曲线图。
2 声学测量设备
通过声学测量仪器,测量房间的频率响应,并对声学特性进行分析和校正。
3 音频处理软件
提供频率响应分析和调校的功能,方便进行音频设备和系统的优化。
《频率响应法》PPT课件
频率响应法是一种用于分析系统对不同频率输入的响应的方法。通过测量系 统的频率响应,我们可以了解系统在不同频率下的性能特点。
频率响应法的介绍
1 概念
2 应用领域
3 重要性
频率响应法是一种通过 研究系统对输入信号在 不同频率下的响应情况 来分析系统特性的方法。
频率响应法广泛应用于 音频系统、电子滤波器、 声学设备等领域的设计 和优化。
《频率响应概述》课件
频率响应分析可以优化系统的性能,使得系统在运行中更加高效。
频率响应分析方法
Bode图法
Bode图法可以帮助快速计算系 统的频率响应,并用图像的方 式表示。
Nyquist图法
Nyquist图法可以判断系统的稳 定性,并辅助进行控制系统的 设计。
极点零点法
极点零点法可以帮助快速计算 系统的频率响应,尤其适合复 杂系统。
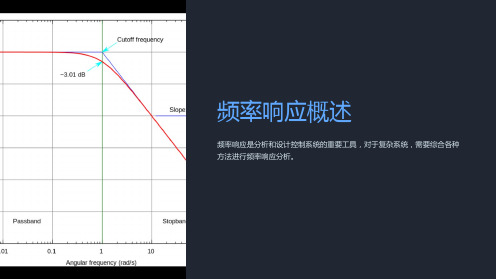
频率响应概述
频率响应是分析和设计控制系统的重要工具,对于复杂系统,需要综合各种 方法进行频率响应分析。
什么是频率响应
声音的波动
音乐播放器上的均衡器
声音的频率响应是指声音在不同频率下的响应情况。
均衡器可以调节不同频率的响应,以获得所需的音 效。
音响系统
音响系统的频率响应是指响应不同频率声音时,用 于放大声音的元件的响应情况。
系统特性表达式
1
传递函数和频率响应的关系
传递函数是控制系统中的一种常用模型,其频率响应是传递函数的特性之一。
2
频率响应的物理意义
频率响应描述的是系统对不同频率输入的响应情况,特别是系统放大或衰减的程 度。
频率响应的重要性
1 对系统的稳定性影响
频率响应分析可以帮助评估系统的稳定性,以保证系统在运行中不出现问题。
频率响应在工程应用中的应用
1
滤波器的设计
根据不同的过滤需求,可以通过对频率
控制系统的设计
2
响应的分析来设计不同的滤波器。
控制系统的频率响应对于系统的性能至
关重要,可以通过频率响应分析来进行
系统的设计。
3
信号处理
频率响应在信号处理领域中的应用广泛, 可以进行各种信号处理工作。
频率响应的基本概念详解PPT学习教案

第1页/共29页
本页完
返回
频率响应的基本概念主页
频率响应及带宽和波特图
低
通
电
路
高
通
电
路
使用说 明:要 学习哪 部分内 容,只 需把鼠 标移到 相应的 目录上 单击鼠 标左键 即可, 按空格 键或鼠 标左键 将按目 录顺序 学习。
甘南·郎木寺·义工
主页
第2页/共29页
结束
返回
电路各种增益的表示,通常采用倍 数法, 这比较 直观和 易于为 人接受 。
带阻电路的幅频响应如图所示。 显然带阻电路有两个通频带 0<BW < L 和 H <BW
实际幅频响应
理想幅频响应
|A|
A0 0.7A0
通带
阻带
通带
0
L 0 H
第13页/共29页
本页完 继续
频率响应及带宽和波特图
4、几种频率响应电路
(1) 低 通 电 路
本内容学习完毕,单击返回本, 返内容结束页
(2) 高 通 电 路
BW
0 fL
0
幅频响应
f fH
f
此线与曲线在高频段上的交点所对 应的频 率称为 上限频 率fH。
-90
-18上0 限频fH和下限
频fL -270
相频响应
第6页/共29页
本页完 继续
1、增益的分贝(dB)表示法 2、频率响应及带宽 (1)幅频响应及带宽
带宽 BW = fH - fL 在工程设计上,处于通频带BW 内的各种频率的信号可视为能通过放 大器并 得到同 一放大 量,在 通频带 以外的 各种频 率的信 号可视 为得不 到放大 而受到 衰减。 通频带 的名称 来由于 此。
模电频率响应知识点总结

一、频率响应的概念频率响应是指电路对不同频率信号的处理能力,也可以理解为电路对频率变化的敏感程度。
在模拟电路中,频率响应通常指的是电路对正弦信号的频率特性,可以通过频率响应曲线来表示电路对不同频率信号的响应。
二、频率响应的参数1.增益:电路对不同频率信号的放大或衰减程度。
2.相位:输入信号与输出信号之间的相位差,通常用角度来表示。
3.带宽:频率响应曲线上的-3dB截止频率,该频率点对应的频率范围即为电路的带宽。
三、频率响应的表示1.频率响应曲线:是以频率为横轴,增益或相位为纵轴的曲线,可以直观地表示电路对不同频率信号的处理能力。
2.相频特性:是以频率为横轴,相位差为纵轴的曲线,可以表示电路对不同频率信号的相位特性。
四、常见的频率响应类型1.低通滤波器:能够通过低频信号,阻断高频信号,常用于消除噪声和滤波。
2.高通滤波器:能够通过高频信号,阻断低频信号,常用于截止直流分量和滤波。
3.带通滤波器:能够通过特定频率范围内的信号,阻断其他频率信号,常用于频率选择性放大和滤波。
4.带阻滤波器:能够阻断特定频率范围内的信号,通过其他频率信号,通常用于陷波和滤波。
五、频率响应分析方法1.频域分析:通过频率响应曲线和相频特性来分析电路对不同频率信号的处理能力,通常使用频域分析方法来得到电路的频率响应。
2.波特图分析:通过电路的传递函数来绘制波特图,可以直观地表示电路的频率响应特性。
3.极坐标图分析:通过极坐标图来表示频率响应曲线,可以直观地表示电路的增益和相位特性。
1.电路结构:不同电路结构对频率响应的影响不同,例如积分电路和微分电路的频率响应特性是不同的。
2.元件参数:电容和电感的数值大小会直接影响电路的频率响应,例如电容值越大,低频特性越好。
3.工作状态:电路工作状态的改变会导致频率响应的变化,例如放大器的工作状态会影响其频率响应的稳定性。
七、频率响应的应用1.滤波器设计:根据不同频率信号的需要,设计出对应的滤波器电路,用于信号处理和滤波。
管理学原理 频率响应

管理学原理一、频率响应简介频率响应是管理学中的一项重要原理,它涉及到在不同频率下对管理决策的回应和适应能力。
频率响应不仅仅是对管理决策是否能够成功执行的评估,还与组织和个人对变化的敏感性和应对能力有关。
本文将从不同角度探讨频率响应的相关内容。
二、频率响应的概念和意义频率响应是指管理决策在不同频率下的表现和变化。
对于管理者来说,了解和掌握频率响应的原理和规律可以帮助他们更好地应对不同的环境和情境,提高管理决策的成功率和效果。
频率响应也是管理学的一个重要研究方向,研究者通过分析不同的管理决策在不同频率下的表现,探索管理决策的规律和特性。
三、影响频率响应的因素1. 决策者的认知和心理因素决策者的认知和心理因素对频率响应有着重要影响。
不同的个人和组织对信息的接受和反应速度不同,这将直接影响到决策的执行效果。
此外,决策者的个人偏好、信念和价值观也会在决策过程中产生频率响应的差异。
2. 组织结构和文化组织结构和文化是决定组织频率响应的另一个重要因素。
不同类型和规模的组织拥有不同的结构和文化,这决定了组织对频率变化的敏感度和适应能力。
灵活的组织结构和积极的组织文化有利于组织实现更好的频率响应。
3. 外部环境的压力和变化外部环境的压力和变化是决策者频率响应的重要动力。
不同行业和市场对决策的频率要求不同,全球化和技术进步也使得外部环境变得更加复杂多变。
决策者需要密切关注外部环境的变化,及时调整和变革管理决策,以适应外部环境的变化。
四、频率响应的实践策略1. 建立有效的信息系统建立有效的信息系统可以提高决策者对信息的敏感度和把握信息的能力。
信息系统应该具备数据采集、处理和分析的功能,能够迅速准确地反馈信息,以便决策者及时做出正确的决策。
2. 推动组织文化的变革积极的组织文化有助于组织实现更好的频率响应。
决策者需要推动组织文化的变革,倡导开放、创新和学习的文化,提高组织的适应能力和变革能力。
3. 采用灵活的管理方法和技术灵活的管理方法和技术可以帮助决策者更好地适应频率变化的需求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
RVout = RD
Vout (s) =
Vin
(1 +
− gmRD s )(1+
s
)
ωin
ωout
ωout
=
1 RD (CDB + CGD )
非主极点
开路时间常数近似法分析主极点
∑T0
=
RS CGS
+
RS [(1+
gmRD )
+
RD RS
]CGD
+
RDCDB
ω−3dB
=
1 ∑T0
=
RS CGS
+
RS [(1+
z 短路时间常数近似:电路各极点频率之和是每一个电容所引 入的时间常数的倒数之和,每一个电容所引入的时间常数是
其本身的电容量与其它电容短路时电容两端阻抗的乘积
∑ω pi
=
∑
1
τi
z 若电路有n个极点,pn的幅度远大于其它极点的幅度
ω pn ≈ ∑in=1ω pi = ∑τ1si
z 若电路仅有两个分得很开的实极点,则开路时间常数近似可
+
因电容环路而使用Miller近似, 否则结果应同应用了主极点近似
1的精确分析结果相同
RSCGS + RD (CGD + CDB )
ω = + g / C 极点近
似) ω p2
=
RS
(1+ gmRD )CGD + RSCGS + RD (CGD + CDB )
RS
RD
(CGS CGD
+
CGS CDB
了增益的频率响 应,在CDB较大时 出现误差
开路时 间常数
ω−3dB
=
RS CGS
+
RS [(1+
1 gmRD )
+
RD RS
]CGD
+
RDCDB
同应用了主极点 近似的精确分析 结果相同
短路时 间常数
精确分 析(主
ω
p1
ω p2
≈
1 RD (CDB + CGD )
= RS (1+ gmRD )CGD
a(s)
=
(1
−
a0 s/
p1
)3
z 在每一个复数零点 频率处,幅度以+ 12dB/oct的速率 上升;在每一个复 数极点频率处,幅 度以-12dB/oct 的速率下降
z 对于左半平面复数 极点(左半平面复 数零点)wm, 相位 在0.1wm 频率处开 始减小(增加), 在wm 频率处减小 (增加)90o,在 10wm 频率处减小 (增加)接近180o
gm
mVX
+
Vout
(
1 RD
+
1 RD
+
CDB s)
− CGDs
+ CDBs)
=
0
z 传输函数 ξ = CGSCGD + CGSCDB + CGDCDB
Vout Vin
(s)
=
RS RDξs2
+ [RS
(1 +
(CGDs − gm )RD gmRD )CGD + RSCGS
+
RD (CGD
+
CDB )]s
ωout
=
1 RD (CDB + CGD )
ω p2
=
∑
1
τ si
≈1
τ s2
=
1 RD (CDB + CGD )
精确分析
z 各节点电流定律
VX −Vin RS
+ VX CGS s
+ (VX
− Vout )CGDs
=
0
z
(Vout −VX
求出VX
VX = −
)CGDs + g Vout (CGDs
ω p1 ≈ 1/ b1
A( jω) ≈
K
1+ (ω )2
p1
ω−3dB
≈
p1
≈1 b1
z 对于两极点系统: A(s) = N (s) D(s)
D(s) = 1+ b1s + b2s2 = (1− s / p1)(1− s / p2 )
z 存在主极点: p1 << p2
ω p1 ≈ 1/ b1
z 对于s2项:非主极点
z 若某一个电容所引入的时间常数远大于其它电容所引入的时间 常数,则估计3dB带宽时可仅用该电容所引入的时间常数进行 计算
Vout (s) = A1 • A2 • 1
Vin
1+ RSCins 1+ R1CN s 1+ R2CPs
∑T0 = RSCin + R1CN + R2CP
ω−3dB
=
1 ∑T0
1 p1 p2
=
b2
p2
=
1 p1b2
ω p2
=
b1 b2
z 开路时间常数近似:决定电路各极点的时间常数之和是每一个 电容所引入的时间常数之和,每一个电容所引入的时间常数是 其本身的电容量与其它电容开路时电容两端阻抗的乘积
z 若存在主极点,则决定电路3dB带宽的时间常数近似为每一个 电容所引入的时间常数之和
+
CGDCDB
)零点的出现是
其它分析法所
z
m GD
不能提供的
Zin
输入阻抗
z Miller近似:
Zin
=
[CGS
+
(1 +
1 gmRD )CGD ]s
z 精确分析:
Zin
=
1 CGS s
||
1+ RD (CGD + CDB )s CGDs(1+ gmRD + RDCDBs)
z 低频下,输入阻抗为电容性的(纯虚数);在较高
=
RS
(1+ gmRD )CGD + RSCGS + RD (CGD + CDB ) RS RD (CGSCGD + CGSCDB + CGDCDB )
CGS >> (1+ gmRD )CGD + RD (CGD + CDB ) / RS
ω p2
≈
RS CGS RS RD (CGSCGD + CGSCDB )
单极点系统
z 传输函数:
vo (s) = K
vi
1− s / p1
z 输入信号为阶跃信号
vi
(s)
=
va s
z 输出信号
阶跃信号输入
vo
(s)
=
Kva
(1 s
−
s
1 −
) p1
tr
= t2
− t1
=−
1 ln 9 = p1
0.35 f −3dB
vo (t) = Kva (1− e p1t )
单极点系统:方波信号输入
以用来估算电路的主极点,而短路时间常数近似则可以用来
估算电路的非主极点
z 若某一个电容所引入的时间常数远小于其它电容所引入的时 间常数,则估计非主极点时可仅用该电容所引入的时间常数
进行计算
z 短路时间常数近似要求电路中不包含电容环路
共源放大器的频率响应
基本特性
z 需要考虑的寄生电容:CGS、CGD、CDB z 忽略沟道长度调制效应
升;在每一个极点
频率处,幅度以- 6dB/oct的速率下
降
z 对于左半平面极点 (左半平面零点) wm, 相位在0.1wm 频率处开始减小 (增加),在wm 频率处减小(增 加)45o,在10wm 频率处减小(增 加)接近90o
a(s) =
a0
(1− s / p1)(1− s / p2 )(1− s / p3)
节点近似法分析 Av0 = −gmRD
z 两个节点:X和Vout z 节点X:Miller近似
CX = CGS + (1− Av )CGD
RX = RS
ωin
=
RS [CGS
+
1 (1 +
gmRD )CGD ]
主极点
z 节点Vout CVout = CDB + (1 − Av−1)CGD ≈ CDB + CGD
z 在每一个零点频率 处,幅度以+ 6×NdB/oct的速率
上升;在每一个极
点频率处,幅度以 -6×NdB/oct的速
率下降
z 对于左半平面极点 (左半平面零点) wm, 相位在0.1wm 频率处开始减小 (增加),在wm 频率处减小(增 加)N×45o,在 10wm 频率处减小 (增加)接近 N×90o
Miller定理
应用注意事项(一)
z 阻抗Z不能是X和Y之间唯一的信号通道
z Miller定理主要用在阻抗Z形成与主信号通道并联 的另一条信号通道的场合
应用注意事项(二)
z Av会随频率变化,但通常使用低频下的增 益值以简化计算(Miller近似)
z Miller定理可以用来计算电路的输入阻抗和 正向传输函数(增益),则不能用来计算 电路的输出阻抗或者反向传输函数
1 gmRD ) +
RD RS
]CGD
+
RDCDB
ωin
=
RS [CGS
+
1 (1 +
gmRD )CGD ]
短路时间常数近似法 分析非主极点
z由于电路中包含电容 环路,不能直接用短路 时间常数近似法分析非 主极点