第二章 典型环节的数学模型(2-1)
第2章系统的数学模型02精选全文完整版
图2-13 油缸-负载系统
解:液压缸的作用力F
F pA
式中p—进油压力
A—液压缸工作面积
该力用于克服阻尼负载和弹性负载,即
dx
F Bc
kx
dt
式中x —液压缸输出位移
Bc—阻尼系数
K —弹簧刚度
合并以上两式,得液压缸的运动方程式:
dx
Bc
kx Ap
dt
传递函数为
A
4
dt
dt
dt
dt
解:按(2-53)式,则传递函数为
Y ( s)
6s 7
(1) G ( s )
3
X ( s) 5s 2s 2 s 2
(2) G ( s )
Y (பைடு நூலகம்s)
4
4
X ( s) s 2s 3 6s 2 3s 2
二、典型环节的传递函数
bm s m bm 1 s m 1 ...... b1 s b0
dt
dx
b1
b0 x
dt
(2-51)
式中,n≥m; an、bm均为系统结构参数所决定的定
常数 。(n,m=0、1、2、3…)
如果变量及其各阶导数初值为零,取等式两边拉
氏变换后得
an s nY ( s ) an1 s n1Y ( s ) a1 sY ( s ) a0Y ( s )
X(s)=0 系统的特征方程,→ 特征根。
特征方程决定着系统的动态特性。
X(s) 中s的最高阶次等于系统的阶次。
b0
当s=0时 G (0) K 系统的放大系数或增益
a0
!从微分方程的角度看,此时相当于所有的导
第4讲 典型环节
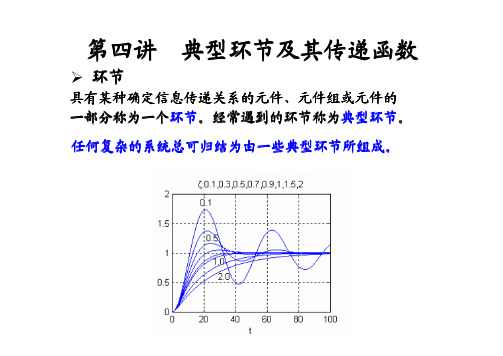
输出量不失真、无惯性、快速地跟随输入量,两者成 比例关系。
其运动方程为:xo(t)=Kxi(t)
xo(t)、xi(t)——分别为环节的输出量和输入量; K——比例系数,等于输出量与输入量之比。
比例环节的传递函数为: X o ( s) G( s) = =K X i ( s)
传递函数: G ( s ) = K τ 2 s 2 + 2ξ τs + 1
(
)
式中,τ——时间常数 ξ——阻尼比,对于二阶微分环节, 0<ξ<1 K——比例系数
系统数学模型 第二章 � 积分环节
输出量正比于输入量对时间的积分。 运动方程为: xo (t ) = 1 ∫ t xi (t )dt 0
T
车初始位置距平衡点1.0,则所建立模型如图示。
F c k 系统微分方程 ̇ ̇= − x ̇− x x m m m
若外力输入F=0,仿真所得示 波器窗口小车位移随时间变 化的轨迹如图。
F
为0
初值为1
第二章 系统数学模型
质量—弹簧—阻尼系统
F
F如下图 系统输入 系统输入F
系统输出 x如下图所示 系统输出x
微分环节的输出是输入的导数,即输出反映了 输入信号的变化趋势,从而给系统以有关输入 变化趋势的预告。因此, 微分环节常用来改善 变化趋势的预告。因此,微分环节常用来改善 控制系统的动态性能。
第二章 系统数学模型
� 二阶微分环节 运动方程:
⎡ 2 d2 ⎤ d xo (t ) = K ⎢τ x (t ) + 2ξ τ xi (t ) + xi (t )⎥, 0 < ξ < 1 2 i dt ⎣ dt ⎦
自动控制原理课件 第二章 线性系统的数学模型
c(t ) e
dt Leabharlann t
c( s )
g ( ) r ( ) d e s ( ) d 0 0 g ( )e s r ( )e s d d 0 0
0
g ( )e
5) 闭环系统传递函数G(s)的分母并令其为0,就是系统的特征方 程。
• 涉及的是线性系统 非线性系统必须 进行线性化处理
§2-6 信号流程图
系统很复杂,为方便研究,也为了与 实际对应,通常将复杂系统分解为 若干典型环节的连接
数学模型的定义 数学模型: 描述系统变量间相互关系的动态性能的运动方程 建立数学模型的方法:
解析法: 依据系统及元件各变量之间所遵循的物理或化学规律列写出相 应的数学关系式,建立模型。 自动控制系统的组成可以是电气的,机械的,液压的,气动的等等,然 而描述这些系统的数学模型却可以是相同的。因此,通过数学模型来研 究自动控制系统,就摆脱了各种类型系统的外部关系而抓住这些系统的 共同运动规律,控制系统的数学模型是通过物理学,化学,生物学等定 律来描述的,如机械系统的牛顿定律,电气系统的克希霍夫定律等都是 用来描述系统模型的基本定律。 实验法: 人为地对系统施加某种测试信号,记录其输出响应,并用适当 的数学模型进行逼近。这种方法也称为系统辨识。 数学模型的形式 时间域: 复数域: 频率域: 微分方程 差分方程 传递函数 结构图 频率特性 状态方程
1 例1 : F ( s) ( s 1)(s 2)(s 3) c c c 1 2 3 s 1 s 2 s 3
1 1 c1 [ ( s 1)]s 1 ( s 1)(s 2)(s 3) 6 1 1 c2 [ ( s 2)]s 2 ( s 1)(s 2)(s 3) 15 1 1 c3 [ ( s 3)]s 3 ( s 1)(s 2)(s 3) 10 1 1 1 1 1 1 F ( s) 6 s 1 15 s 2 10 s 3 1 1 1 f (t ) e t e 2t e 3t 6 15 10
自动控制原理:第二章--控制系统数学模型全
TaTLma KJe K
dMdML m dtdt
L
Tm
Ra J K eKm
——机电时间常数(秒);
Ta
La Ra
—电动机电枢回路时间常数 (秒)
若输出为电动机的转角q ,则有
TaTm
d 3q
dt 3
Tm
d 2q
dt 2
dq
dt
1 Ke
ua
Tm J
ML
TaTm J
dM L dt
—— 三阶线性定常微分方程 9
(1)根据克希霍夫定律可写出原始方程式
((23))式消LuLCcdd中去(titd)i中2d是utRc间2(中Cti1)变间C1量iR变dCti量idd后udt,ct,(t它)u输r与u(入tc输)(输t)出出uu微rc((tt)分)有方如程下式关系
或
T1T2
d 2uc (t) dt 2
T2
duc (t) dt
扰动输入为负载转矩ML。 (1)列各元件方程式。电动机方程式为:
TaTm
d 2w
dt 2
测输T速Km出发td为d电wt电测压机速w 反 K馈1e系ua数
Tm J
M反L馈 电TaJT压m
dM L dt
ua Kae ut Ktw e ur ut 12
(2)消去中间变量。从以上各式中消去中间变
量ua,e,ut,最后得到系统的微分方程式
线性(或线性化)定常系统在零初始条件下, 输出量的拉氏变换与输入量的拉氏变换之比 称为传递函数。
令线C性(s定)=常L[c系(t统)],由R下(s)述=Ln阶[r(微t)]分,方在程初描始述条:件为零
时[[aab,nnmbssdmdn进mt+ndn+dt行acmmbn(tm拉-r1)-(s1t氏ns)-am1变n+-1b1+…m换dd…1t+,nndd+1a1t得mm1bcs1(11到+ts)r+a关(t0b)]于0C]的RD(sM的s的a(()分s1s(分))=代sdbd为母)t1子为数cd传d多(tt多传方)r递项(项t程递函)式a式0函数c。b(0数tr) (t)
自动控制理论_哈尔滨工业大学_2 第2章线性系统的数学模型_(2.4.1) 典型环节的传递函数PPT
0
t
积分环节在单位阶跃输入下的响应
例:积分器
i2
C
ui R
_
i1
uo
+i1 i2Fra bibliotek1 Rui
(t)
C
d dt
u0
(t )
uo
(t)
1 RC
ui (t)dt
G(s) Uo (s) 1 1 Ui (s) RC s
二、几种典型环节的数学模型
4.微分环节
c(t) d r(t)
斜率1/T
0τ
t
例: • 汽车加速、火箭升空; ——作用力和输出速度
• 加热系统; ——加热量和温度变化
• 励磁回路; ——输入电压和励磁电流
惯性大小用τ来量度。 ——τ越大,接近目标值越慢 ,惯性越大;τ越小,接近 目标值越快,惯性越小。
几乎任何物理系统都包含 大大小小的惯性。
二、几种典型环节的数学模型
滞后环节
二、几种典型环节的数学模型
1.比例环节
y(t) Ku(t)
G(s) Y(s) K U (s)
K——称为比例系数或放大系数,也称为环节的增益,有量纲。
输出量无失真、无滞后、成比例地复现输入。
• 无弹性变形的杠杆;
——作用力和输出力
• 忽略非线性和时间迟后的运算放大器;
——比例放大器的输入电压和输出电压
τ=RC—时间常数
当 r(t) 1(t) 时, R(s) 1
s
Y(s) s 1 1 s 1 s s 1
t
y(t) e
t=0时,输出幅值为1;
t→∞时,指数衰减至0。
二、几种典型环节的数学模型
控制工程基础3-第2章 (数学模型1:微分方程,传递函数)
at
sa
2
• 拉氏变换的基本性质 (1) 线性性质
L[af1 (t ) bf 2 (t )] aL[ f1 (t )] bL[ f 2 (t )]
原函数之和的拉氏变换等于各原函数的拉氏变换之和。 (2) 微分性质 L 若[ f (t )] F ( s ) ,则有 L[ f (t )] sF ( s) f (0) f(0)为原函数f(t) 在t=0时的初始值。 (3) 积分性质 则 若 L[ f (t )] F ( s )
该标准型为二阶线性常系数微分方程,系统中存在两个储能元件质 量和弹簧,故方程式左端最高阶次为二。
-
机械旋转系统
• [例2]:设有一个惯性负载和粘性摩擦阻尼器组成的机械 旋转系统,试列出以外力矩M(t)为输入信号,角位移 θ(t)为输出信号的数学模型。
M
J
θ
f
解:
1)确定输入量、输出量
M J θ f
F(t) m f
K x(t)
图 2 2 机 械 系 统
d 2x 3)由牛顿第二定律写原始方程: F F (t ) Fk (t ) F f (t ) m 2 dt dx Fk (t ) kx F f (t ) f 4)写中间变量与输出变量的关系式: dt 2 d x dx 5)将上式代入原始方程消中间变量得: m 2 kx f F (t ) dt dt m d 2 x f dx 1 x F (t ) 6)整理成标准型: 令 T2 m T f 2 k dt k dt k m f 2 k k dx 1 2 d x 则方程化为: Tm dt 2 T f dt x k F (t )
第二章 控制系统的数学模型
导 为什么要介绍本章? 分析、设计控制系统的第一步是建立系统的数学模 型。 读
第二章_典型环节
1. 比例环节 比例环节的微分方程为()()c t Kr t = (2-36)式中,()r t 和()c t 分别为系统输入量和输出量,K 为比例环节的放大系数。
其传递函数为()()()C s G s KR s ==(2-37) 比例环节的结构图为图2-13 比例环节比例环节的特点是,系统输出既不失真也不延迟,而按比例地反映输入的变化,又称为无惯性环节。
2. 惯性环节 惯性环节的微分方程为()()()dc t Tc t r t dt +=(2-38) 式中,K 为环节增益(放大系数);T 为时间常数,它表征了环节的惯性,且与系统的结构参数有关。
其传递函数为()1()()1C s G s R s Ts ==+(2-39) 惯性环节的结构图为图2-14 惯性环节惯性环节的特点是,由于环节中含有一个储能元件,所以当输入量突然变化时,输出量不能跟着突变,而是按指数规律逐渐变化。
3. 微分环节理想微分环节的微分方程为()()d c t T r t =(2-40)式中,d T 为微分时间常数。
其传递函数为()()()d C s G s T sR s == (2-41) 微分环节的结构图为图2-15 微分环节微分环节的特点是,系统输出量正比于输入量的微分,即输出量反映输入量的变化率,而不反映输入量本身的大小。
因此,可由微分环节来反映输入量的变化趋势,使控制作用提前。
实际中常利用微分环节改善系统的动态性能。
但要注意,当输入为单位阶跃响应函数时,输出就是脉冲函数,这在实际中是不可能的。
因此,微分环节一般不单独存在,而是与其他环节(如比例环节)同时存在的。
4. 积分环节积分环节的微分方程为()()i T c t r t = (2-42)式中,i T 为微分时间常数。
其传递函数为()1()()i C s G s R s T s==(2-43)积分环节的结构图为图2-16 积分环节积分环节的特点是,系统输出量正比于输入量对时间的积分,输出量呈线性增长。
典型环节的数学模型
任何一个复杂的系统,总可以看成由一些典型环节组合而成的。
掌握这些典
型环节的特点,可以更方便地分析较复杂系统内部各单元的联系。
典型环节有比较环节、积分环节、惯性环节、微分环节、振荡环节等,分别介绍如下。
一、比例环节
二、积分环节
三、理想微分环节
四、惯性环节
五、振荡环节
特别注意:当0〈§〈1时称为振荡环节若§≥1认为是两个惯性环节
七、延迟环节(又称纯滞后环节)
τ0:纯延迟时间
在延迟时间很小的情况下,延迟环节可用一个小惯性环节来代替。
第2章 2-4 典型环节分析.
下图给出了微分环节的实例。
在图(a)的电路中,输出电压uc与输入电压ur间的微分方程为:
传递函数为: 式中:
13
在图 (b) 中,输出电流 i(t) 与输入电压ur (t) 间的微分方程为:
式中
其传递函数为:
14
在图 (c) 中,选取直流测速发电机的输入量为转角θ, 输出量为电枢电压 u(t) 则其输入、输出间的微分方程为
2.4、典型环节的分析
一个物理系统是由许多元件组合而成的,虽然元件的 结构和作用原理多种多样,但若考察其数学模型,却可 以划分成为数不多的几种基本类型,称之为典型环节。 这些环节是比例环节、惯性环节、积分环节、振荡环 节、微分环节和滞后环节 1.比例环节比例环节又称放大环节。 其数学方程为:
式中c(t)为输出量,r(t)为输入量,K为放大系数(或增益)。
16
上述各典型环节,是从数学模型的角度来划分 的。 它们是系统传递函数的最基本的构成因子。 在和实际 元件相联系时,应注意以下几点: ⑴系统的典型环节是按数学模型的共性来划分 的,他与 系统中使用的元件并非都是一一对应的,一 个元件的数 学模型可能是若干个典型环节的数学模型的组合。而若 干个元件的数学模型的组合也可能就是一个典型的数学 模型。 ⑵同一装置(元件),如果选取的输入、输出量不同, 它可以成为不同的典型环节。如直流电动机 以电枢电压 为输入、转速为输出时,它是一个二阶振 荡环节。但若 以电枢电流为输入、转速为输出时,它却是一个积分环 节。
17
⑶在分析和设计系统时,将被控对象(或系统)的数学模 型进行分解,就可以了解它是由哪些典型环 节所组成的。 因而,掌握典型环节的动态特性将有助于对系统动态特性 的分析研究。 ⑷ 典型环节的概念只适用于能够用线性定常数学模型描述 的系统。 既然可以把组成控制系统的元件划分为若干典型环节, 那么控制系统的传递函数也可以写成如下一般形式:
第二章 控制系统的数学模型
⇒
QQQr00(((sss)))−−=QQH0c1(((sss)))R=−=1Hcc122s(sHsH)12(s()s)
qc (t)
=
h2 (t) R2
Qc
(s)
=
H2 (s) R2
G(s)
=
Qc (s) Qr (s)
=
R1R 2C1C 2s 2
1 + (R1C1 + R2C2
机理分析法:
依据描述系统运动规律的定律并通过理论推导 来得到数学模型的方法 。
实验辨识法:
通过整理基于系统输入-输出的实验数据来 得到系统的数学模型。本章着重讨论机理分析 法。
建模特点:相似性、简化性、准确性。
数学模型类型: 经典控制理论: 微分方程(连续系统)、
差分方程(离散系统) 、传递函数、系 统方框图和信号流图; 现代控制理论:状态方程
注:如果在第(3)步结束时已经得到符合第(4)步要求的微分方程,则 无须第(4)步。
线性定常系统微分方程的一般形式
an
d nc(t) dt n
+
an−1
d n−1c(t ) dt n−1
+
...
+
a1
dc(t ) dt
+
a0c(t )
=
bm
d mr(t) dt m
+
bm −1
d m−1r(t ) dt m−1
d x(t ) + dt
Kx(t ) = f (t )
当f(t)=f1(t)时,上述方程的解为x1(t); 当f(t)=f2(t)时,上述方程的解为x2(t); 如果f(t)=f1(t)+ f2(t) ,方程的解为x(t)= x1(t)+x2(t),这就是叠加性
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
T2
d 2c(t) dt2
2ζT
dc(t) dt
c(t)
Kr(t)
传递函数:
R(s)
1
C(s)
T 2s2 2 Ts 1
式中:——阻尼比, T——振荡环节的时间常数。
频率特性:
G( j ) C( j )
1
R( j ) (1 T 2 2 ) j2 T
16
例:RLC电路
R
L
+
r(t)
i(t)
C
G(s) K s
频率特性:
G(jω ) K jω
10
例:积分电路
输入为r(t),输出为c(t)
ic (t) C
i1(t ) R1
-
+K
r (t )
c (t )
R3
ic (t)
i1 (t)
r(t) R1
R(s)
1
R1Cs
C(s)
运动方程:
传递函数:
c(t)
1 C
ic (t)dt
1 R1C
19
消去中间变量Eb(s)、T(s)和I(s)
θ (s) Ea (s)
s[LJs 2
K (LB RJ)s (RB KK b )]
如果输入量Ea(s),输出量转速(s),则又可得到:
(s)
K
Ea (s) LJs2 (LB RJ)s (RB KK b )
这是一个典型的振荡环节的传递函数
dt
式中:K——弹簧弹性系数;
M——物体的质量,
B——粘性摩擦系数。
传递函数:
1
G(s) X(s)
K
F(s) M s2 B s 1
KK
K f (t)
M x(t)
B 图2-16 机械振荡
22
6、一阶微分环节
特 点:此环节的输出量不仅与输入量本身 有关,而且与输入量的变化率有关
运动方程: c(t) T dr(t) r(t) dt
第二章 物理系统的数学模型
第一节 控制工程的数学方法 (Laplace变换)
第二节 物理系统的数学模型 第三节 非线性数学模型的线性化
1
第四节 典型环节及其传递函数
1、比例环节(又叫放大环节)
R(s)
特 点:输出量按一定比例复现输入量, 无滞后、失真现象。
C(s)
K
运动方程 : c(t)=Kr(t) K——放大系数,通常都是有量纲的。
r(t)dt
1 T
r(t)dt
G(s) C(s) 1 K R(s) Ts s
(T=R1C)
频率特性: G(j ) C(j ) K
R(j ) jT
11
其它举例
n(t) D
x (t )
N (s)
D
X (s)
s
i (t ) u(t)
I (s)
1
U (s)
Cs
12
4、惯性环节(又叫非周期环节)
频率特性:
(jω )
K
Ea (jω ) (RB KK b - LJω2 ) j(LB RJ)ω
20
电枢回路中的电感L通常较小,若忽略L的影响,则:
θ (s)
Km
Ea (s) s(Tms 1)
(s)
Km
Ea (s) Tms 1
式中:km=K/(RB+KKb) ——电动机增益常数 Tm=RJ/(RB+KKb)——电动机时间常数。
特 点:动态过程中,输出量正比于输入量的变化速度。
R(s)
S
C(s)
运动方程:
C(t) K dr(t) dt
传递函数: 频率特性:
G(s) C(s) KS R(s)
G(jω ) C(jω ) jKω R(jω )
6
例 RC电路
ur (t)
i (t )
C
R
uc (t)
设:输入——ur(t) 输出——uc(t)
Ld
d dt
id
Rd id
ud
即
d
d dt
id
ud Rd
+
d
Ld Rd
ud
传递函数:
1 G(s) Id (s) Rd
Ud (s) ds 1
式中 Ld ——电枢回路电感; Rd ——电枢回路电阻; τd ——电枢绕组的时间常数;
id D
14
其他一些例子
L
r(t)
R c(t)
R(s)
1
C(s)
R
dt
dt
传递函数:
I(s) s 1 (R=1
U(s)
RC= )
频率特性: Gjω 1 jω
一阶微分环节可看成一个微分环节与一个比例环节 的并联,其传递函数和频率特性是惯性环节的倒数。
24
7、二阶微分环节
特点:输出量与输入量及输入量的一阶、二阶导数都有关
运动方程:
c(t)
T2
d 2 r(t) dt 2
频率特性: G(j)=K
3
例:输入:n1(t)——转速 输出:n2(t)——转速
Z1
n1 (t )
n2 (t) Z2
Z1——主动轮的齿数 Z2——从动轮的齿数
N1 s
z1
N2 s
z2
运动方程: 传递函数:
n 2 (t)
z1 z2
n1 (t)
G(s) N 2 (s) z1 K N1(s) z 2
传递函数: G(s) C(s) K
R(s)
C(j )
频率特性:
G(j )
K
R(j )
2
例: 输入:(t)——角度 输出:u(t)——电压
E——恒定电压
+ E
-
u(t)
+
(t) •
(s)
U (s)
K
运动方程: u(t)=K(t) 传递函数: G(s) U(s) K
(s)
K——比例系数,量纲为伏/弧度。
特点:此环节中含有一个独立的储能元件,以致对突变的输 入来说,输出不能立即复现,存在时间上的延迟。
R(s)
1
C(s)
Ts 1
运动方程: T dc(t) c(t) Kr(t)
dt
传递函数: 频率特性:
G(s) K Ts 1
G(jω ) K jTω 1
13
例:直流电机
输入量: ud ——电枢电压 输出量: id ——电枢电流 动态方程如下:
8
其他举例
i(t) C uc (t)
U c (s)
I (s)
Cs
i(t) C
u(t)
R
U (s)
Cs
+ I(s)
1
+
R
i (t )
L
eL (t)
I (s)
EL (s)
Ls9ຫໍສະໝຸດ 3、积分环节特点:输出量的变化速度和输入量成正比。
R(s)
1
C(s)
s
运动方程: dc(t) Kr(t )
dt
传递函数:
例如:前面介绍的振荡环节中两个例子,一个是机械系统, 另一个是电气系统,但传递函数的形式完全相同。
(2)同一个系统,当我们选取不同的输入量、输出 量 时,就可能得到不同形式的传递函数。
例如:电容:输入—电流,输出—电压,则是积分环节。 反之,输入—电压,输出—电流,则为微分环节。
26
频率特性:
G(jω ) N2 (jω ) z1 K N1(jω ) z2
4
其它一些比例环节
R2
R1 -
r (t )
r1
r2
r (t )
c (t )
+K
c (t ) R3
+ Ec
R
ic (t)
ib (t)
R(s)
r2
Cs
r1 r2
R(s)
R2
R1
Cs
Ib (s)
Ic (s)
5
2、微分环节
L
dt 2
dt
eb (t) (t)
分别进行拉氏变换
ea (t)
+ _
D
J
B
1) T ( s ) = K I ( s )
_
2) Eb( s ) = Kb s ( s ) 3) Ea( s ) = ( L s + R ) I ( s ) + Eb( s ) 4) T( s ) = ( J s2 + B s ) ( s )
2ζT
dr(t) dt
r(t)
传递函数: G(s) C(s) T2s2 2ζTs 1
R(s)
频率特性: G( j ) T 2 ( j )2 2 T ( j ) 1
(1 T 2 2 ) j2 T
可以看出,二阶微分环节的传递函数和频率特性是振荡环 节的倒数。
25
小结
(1)不同物理性质的系统,可以有相同形式的传 递函数。
u r
(t)
1 c
i(t)dt i(t)R
i(t) uc (t) R
消去i(t),得到运动方程:
ur (t)
1 RC
uc (t)dt uc (t)
传递函数: G(s) Uc (s) Tcs
U r (s) Tcs 1
(Tc=RC)
当Tc<<1时,传递函数又可表示成: G(s)
Uc (s) U r (s)
传递函数: G( s ) = Ts + 1 频率特性: G( j ) = j T + 1
23
RC电路
i1(t) C