NA200CMM201_0105与MCGS组态通讯互联案例
MCGS和PLC设备的通讯的实现及例程

图24 工作台窗口
2013-7-11 32
谢谢大家!
2013-7-11
33
2013-7-11 5
图2 设备组态窗口
2013-7-11 6
单击工具栏上的 工具箱 按钮将弹出如图3所示的设 备工具箱窗口,需要说明的 是,在MCGS中PLC设备是 作为子设备挂在串口父设备 下的,因此在向设备组态窗 口中添加PLC设备前,必须 先添加一个串口父设备,当 直接用串口进行本地通讯时 ,我们添加”串口通讯父设 备”,因此双击其中的串口 通讯父设备,在设备组态窗 口中添加一个串口通讯设备 ,如图4: 图3 设备工具箱
2013-7-11
20
MCGS操作举例
我们现在以一个实验天塔之光开发一个监控制界面为例,整 体介绍一下怎样开发一个MCGS组态监控系统. I/O地址分配情况: 输入 I0.0-------启动按钮 I0.1-------停止按钮
2013-7-11
输出 Q0.0-------L1 Q0.1-------L2 Q0.2-------L3 Q0.3-------L4 Q0.4-------L5 Q0.5-------L6 Q0.6-------L7 Q0.7-------L8 Q1.0------ L9
2013-7-11 23
第二步,在实时数据库中建立如图17的实时数据对象
图17 天塔之光实例的数据对象
2013-7-11
24
第三步,如图18设置串口父设备的通讯参数.
图18 串口父设备设备属性设置对话框
2013-7-11
25
第四步,为PLC设备创建如图19所示的连接通道
图19 天塔之光实例的PLC通道
21
第一步,在图15的工作台窗口中单击”用户窗口”标签,然
欧姆龙plc与mcgs组态软件通信组态实例小车自动往返装卸料

自动往返装卸料
1
工程分析
3.设置PLC设备属性
(3)单击“确认”窗口,返回设备组态窗口。
3.设置PLC设备属性
(4)双击“设备0-[扩展Omron HostLink]” ,弹出如图所示窗口。在“基本属性”页进行 如图所示的设置。采集周期:为运行时MCGS 对设备进行操作的时间周期,单位为毫秒,一 般在静态测量时设为1000ms,在快速测量时 设为200ms。初始工作状态:用于设置设备的 起始工作状态,设置为启动时,在进入MCGS 运行环境时,MCGS即自动开始对设备进行操 作,设置为停止时,MCGS不对设备进行操作 ,但可以用MCGS的设备操作函数和策略在 MCGS运行环境中启动或停止设备。PLC地址: 如直接的RS232方式则为0,用适配器时地址 由自己设置,这里设为0。通讯等待时间设为 200。
2
添加PLC设备
3
设置PLC设备属性
4
设备终效果图
1.工程分析
数据对象:
1.工程分析
流程控制:
按启动按钮后,小车停在左边,左行程开关动作, 开始装料,3s后装料结束,小车右行,当右行程 开关动作,开始卸料,3s后卸料结束,小车左行, 回到原始位置,自动循环3次后结束。 按下复位按钮后,小车回到原始位置。
(6)双击“通用串口父设备”,再双击“扩展 OmronHostLink”设备,它们被添加到左侧设 备组态窗口中,如图所示。至此完成设备的添 加。
非常实用的mcgs触摸屏编程实例下(10例)-
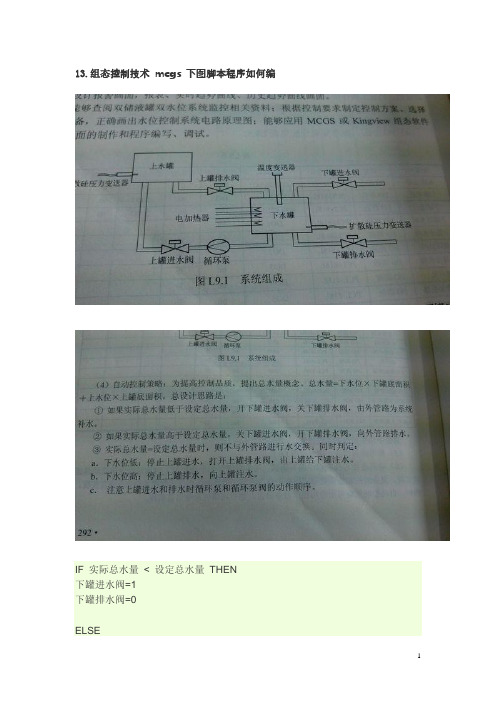
13.组态控制技术mcgs 下图脚本程序如何编IF 实际总水量< 设定总水量THEN下罐进水阀=1下罐排水阀=0ELSEIF 实际总水量> 设定总水量THEN下罐进水阀=0下罐排水阀=1ELSEIF 实际总水量= 设定总水量THENIF 下水位< 下水位设定量THEN循环泵=0上罐进水阀=0上罐排水阀=1ELSEIF 下水位> 下水位设定量THEN上罐排水阀=0上罐进水阀=1循环泵=1ENDIFENDIFENDIFENDIFENDIF当然如果你的下水位是由开关量来确定的话,后面那一部分也可以改成:IF 实际总水量= 设定总水量THENIF 下水位低=1 THEN循环泵=0上罐进水阀=0上罐排水阀=1ELSEIF 下水位高=1 THEN上罐排水阀=0上罐进水阀=1循环泵=1上面只是大体的一个思路,里面还是有很多需要补充的地方,比如给上水罐注水时,是否需要先判断进水阀是否打开再启动循环泵,给下水罐注水时是否需要判断先关停循环泵再关停进水阀,然后开启上罐排水阀,如果是这种情况的话,建议你可以使用运行策略来完成脚本编写。
14.MCGS 组态软件脚本程序有没有延时指令!Sleep(mTime)函数意义:在脚本程序中等待mTime毫秒,然后执行下条语句实例:!Sleep(10),延时10毫秒15.怎么使MCGS组态动画实现左右移动?要用脚本程序写先向右移,再原路返回很简单的啊,就是双击要实现动画的东西,钩选水平移动,然后在水平移动上选择对应的字地址,将此字地址与要移动的位置对应好,然后在脚本里面对这个字地址编程就可以了。
只要对我之前说的那个对应的字地址编脚本可以了脚本可以这么编IF 对应位=0 THEN 中间变量=0IF 对应位=100 THEN 中间变量= 1IF 中间变量=0 THEN 对应位= 对应位+ 5IF 中间变量=1 THEN 对应位= 对应位- 516.mcgs怎么实现按钮按下去不弹起首先放上两个元件,但不是按钮然后分别设置属性,上面的是“按钮动作——置一——按钮”“可见度——按钮——不可见”如下图下面的和上面的刚好相反,“按钮动作——清零——按钮”“可见度——按钮——可见”这样两个元件就可以交替显示了,达到一个按钮按下不起的效果。
NA200H PLC与昆仑通态触摸屏以太网通讯
NA200H PLC与昆仑通态触摸屏以太网通讯2016-7-11陈云目录NA200H PLC与昆仑通态触摸屏以太网通训 (1)1、NA200HPLC通讯口设置 (2)1.1NA200HPLC通讯口定义 (2)1.2NA200HPLC通讯口设置 (3)2、NA200HPLC内部测点与MODBUS协议对应关系 (3)3、昆仑通态通触摸屏通讯口 (5)4、昆仑通态通触摸屏通讯设置 (5)4.1设备管理添加添加MODBUS TCP设备 (5)4.2MODBUS TCP设备设置 (6)4.3增加PLC通讯变量 (7)5、M ODBUS协议对昆仑通态通触摸屏例程画面 (8)NA200H PLC本体提供带有一个以太网口,4路内置串口,RS485接口。
以太网接口支持100M以太网,支持MODBUS/TCP协议,4个通讯口都支持Modbus RTU主从站通讯。
本文介绍NA200HPLC与昆仑通态触摸屏通过以太网进行通讯。
1、NA200HPLC通讯口设置1.1NA200HPLC通讯口定义⏹以太网接口定义模块提供1个RJ45接口的以太网,通过以太网与上位机软件通讯。
定义如下图所示:⏹串口接口定义CPU提供4个RS485接口,其中COM1采用DB9F接口方式,COM2既可选择DB9F接口也可采用端子接线方式连接设备(二种方式选择一种),COM3和COM4采用端子接线方式(RS485端子接线定义见CPU模块端子定义),支持波特率9600-115200bps。
DB9F接口定义如下图所示:端子接线的RS485接口定义如下表C2+RS485接口2信号线AC2-RS485接口2信号线BC3+RS485接口3信号线AC3-RS485接口3信号线BC4+RS485接口4信号线AC4-RS485接口4信号线B本文介绍以太网与触摸屏连接使用,所以使用RJ45口与触摸屏连接,连接网线使用标准的直连线即可。
1.2NA200HPLC通讯口设置NA200HPLC的通讯口设置如下图图1.2.1以太网设置:IP地址,PLC以太网口的地址,必须设置。
MCGS 项目7:组态应用实例
注释
上料机械手6个位置 的限位开关,
0:未到达该位置 1:处于该位置
正品捡拾机械手6个位置的限位 开关,
0:未到达该位置 1:处于该位置
次品捡拾机械手6个位置的限位 开关,
0:未到达该位置 1:处于该位置
NO.15
传感器
第一章 组态软件概述MCGS 实现机械手自动分拣系统
变量名
类型 初 值
位置传感器1 开关
NO.1
第一章 组态软件概述MCGS 实现机械手自动分拣系统
系统的工作流程
第一章 组态软件概述MCGS 实现机械手自动分拣系统
上料机械手 限位开关
正品分拣机械手
质检传感器
料盒
4自由度气 动机械手
次品分拣机械手
升降、伸缩、 旋转和气爪
的抓放
传送带系统
NO.2
位置传感器
系统功能
第一章 组态软件概述MCGS 实现机械手自动分拣系统
秒后,若位置传感器1、2或3都感应到产品,
0
则为正常,否则报警。
0
数值
0
NO.20
产量信息
第一章 组态软件概述MCGS 实现机械手自动分拣系统
变量名 总产量 正品产量 次品产量 合格率
类型 初值
注释
数值
0
各类产品的产量,其存盘方式为变化量为1
数值
0
是自动存盘,为保存该信息,应设置为“系
统退出时,保存当前值为初始值”。
1:正品分拣结束
1:次品分拣结束
1:进行位置检测和质量检测
NO.18
产品信息
第一章 组态软件概述MCGS 实现机械手自动分拣系统
变量名 检测工件 正品工件 次品工件
嵌入式MCGS串口通信快速入门及编程实例_第8章_万能通信之自由指令_温度控制_2018年01月06日_改1
• Preparation For Hardware 准备工作
准备工作
• Preparation For Hardware 准备工作
• Preparation For Hardware 准备工作
• Preparation For Hardware 准备工作
一、台式机 COM口连接485
• Preparation For Hardware 准备工作
地 址 编 地 址 编 (67) H
字节 字节 字节 节
号
号
写实例 81H 81H 43H 00H D2H 04H 16H 05H
仪表地址=1,要写入参数代码00H,要写入的参数内容SV设定值=1234 ( 十六进制=4D2),CRC为00×256+67+1234+1=1302=05 16H。 发送指令:81 81 43 00 D2 04 16 05
启动与CRC校验脚本
• 8.3 Process of Configuration 组态过程
• 8.3 Process of Configuration 组态过程
!SetSerialBaud(1,9600) !SetSerialDataBit(1,8) !SetSerialStopBit(1,0) !SetSerialParityBit(1,0)
• 8.3 Process of Configuration 组态过程
RS485接收脚本
• 8.3 Process of Configuration 组态过程
CountInBuffer=!GetSerialReadBufferSize(1) '检查串口输入缓冲区的字节个数 TempStr="" I=0 While I<CountInBuffer
昆仑通态案例程序
昆仑通态案例程序一、设备连接与前期准备。
1. 硬件连接。
首先呢,我们要把昆仑通态触摸屏和PLC(就假设是西门子的S7 200吧)连接起来。
一般是用通讯线,就像给它们俩牵根线让它们能对话似的。
要确保连接牢固,不然信号就可能传不过去,就像打电话信号不好一样,那可就乱套了。
2. 软件设置。
在昆仑通态的编程软件里(比如MCGS嵌入版),我们得先设置好通讯参数。
这就好比告诉触摸屏到哪儿去找PLC这个小伙伴,通信协议得选对喽,波特率、数据位、停止位这些都得和PLC那边设置成一样的。
要是设置错了,触摸屏就会像找错门牌号一样,找不到PLC这个家,也就获取不到数据啦。
二、触摸屏画面制作。
1. 创建画面。
在MCGS里创建一个新的画面,这就像是在触摸屏上画一幅画一样。
我们可以给这个画面取个名字,比如“电机控制与状态显示”,就像给一幅画取个标题。
2. 添加控件。
电机启停按钮。
我们在画面上添加两个按钮,一个是“启动电机”按钮,另一个是“停止电机”按钮。
这两个按钮就像是控制电机的小开关。
我们可以给按钮设置一下外观,让它们看起来好看点,比如说把“启动电机”按钮设置成绿色的,像交通信号灯里的绿灯表示通行一样,这里绿色就表示启动电机这个动作是可以进行的;把“停止电机”按钮设置成红色的,就像红灯表示停止。
电机状态指示灯。
再添加一个指示灯,用来显示电机的运行状态。
当电机运行的时候,这个指示灯就亮起来,就像小灯在说“我在工作呢”;当电机停止的时候,指示灯就灭掉。
我们可以把这个指示灯设置成黄色的,这样比较醒目。
运行时间显示。
还要添加一个文本框来显示电机的运行时间。
这个文本框就像是一个小黑板,专门用来写电机运行了多久。
三、PLC程序逻辑(简单示例)1. 变量定义。
在PLC程序里,我们要定义一些变量。
比如说定义一个位变量来表示电机的运行状态,我们可以叫它“Motor_Running”,当这个变量为1的时候,表示电机在运行;当它为0的时候,表示电机停止。
力控与MCGS以太网通讯方法
工控机力控与MCGS以太网通讯方法一、MODBUS/TCP通讯协议介绍MODBUS/TCP是简单的、中立厂商的用于管理和控制自动化设备的 MODBUS系列通讯协议的派生产品,显而易见,它覆盖了使用TCP/IP协议的“Intr a net”和“Internet”环境中MOD BUS报文的用途。
协议的最通用用途是为诸如PLC’s,I/O模块,以及连接其它简单域总线或 I/O模块的网关服务的.MODBUS/TCP 使 MODBUS_RTU协议运行于以太网,MODBUS TCP使用 TCP/IP和以太网在站点间传送 MODBUS报文,MODBUS TCP结合了以太网物理网络和网络标准TCP/IP以及以 MODBUS作为应用协议标准的数据表示方法。
MODBUS TCP通信报文被封装于以太网 TCP/ IP数据包中。
与传统的串口方式,MODBUS TCP插入一个标准的MODBUS报文到 TCP报文中,不再带有数据校验和地址。
1.1通讯所使用的以太网参考模型Modbus TCP传输过程中使用了 TCP/IP以太网参考模型的 5层:第一层:物理层,提供设备物理接口,与市售介质/网络适配器相兼容第二层:数据链路层,格式化信号到源/目硬件址数据帧第三层:网络层,实现带有 32位 IP址 IP报文包第四层:传输层,实现可靠性连接、传输、查错、重发、端口服务、传输调度第五层:应用层,Modbus协议报文.1.2 Modbus TCP数据帧Modbus数据在 TCP/IP以太网上传输,支持 Ethernet II和 802.3两种帧格式,Modbus T CP数据帧包含报文头、功能代码和数据 3部分,MBAP报文头(MBAP、Modbus Application Pr otocol、Modbus应用协议)分 4个域,共 7个字节,如下图所示:图: MODBUS TCP报文由于使用以太网 TCP/IP数据链路层的校验机制而保证了数据的完整性,MODBUS T CP 报文中不再带有数据校验”CHECKSUM”,原有报文中的“ADDRESS”也被“UNIT ID”替代而加在 MODBUS应用协议报文头中1.3 Modbus TCP使用的通讯资源端口号在 Moodbus服务器中按缺省协议使用 Port 502 通信端口,在Modus客户器程序中设置任意通信端口,为避免与其他通讯协议的冲突一般建议 2000开始可以使用.1.4 Modbus TCP使用的功能代码按照使用的通途区分,共有 3种类型分别为:1) 公共功能代码:已定义好功能码,保证其唯一性,由 认可;2) 用户自定义功能代码有两组,分别为 65~72和 100~110,无需认可,但不保证代码使用唯一性,如变为公共代码,需交 RFC认可;3) 保留功能代码,由某些公司使用某些传统设备代码,不可作为公共用途。
嵌入式MCGS串口通信快速入门及编程实例
内容摘要
通过详细的调试步骤和异常处理方法,帮助读者更好地理解和掌握串口通信的编程技巧。 《嵌入式MCGS串口通信快速入门及编程实例》是一本实用性强、易于理解的书籍。无论是嵌入式 系统的初学者,还是有一定经验的开发者,都能从这本书中获得有用的知识和经验。通过学习和 实践,读者可以更好地掌握嵌入式MCGS系统串口通信的技能,提高开发效率和质量。
阅读感受
《嵌入式MCGS串口通信快速入门及编程实例》这本书是一本非常实用的学习 资料,对于想要了解和掌握嵌入式MCGS串口通信的读者来说非常值得一读。我相 信通过阅读这本书,我能够更好地掌握嵌入式串口通信的技能,为我的嵌入式系 统开发之路打下坚实的基础。
目录分析
目录分析
《嵌入式MCGS串口通信快速入门及编程实例》是一本介绍嵌入式MCGS串口通 信技术的书籍,其目录结构清晰,内容丰富,适合初学者和有一定经验的读者阅 读。
精彩摘录
精彩摘录
随着嵌入式技术的不断发展,MCGS(嵌入式监控系统)越来越受到人们的。 而《嵌入式MCGS串口通信快速入门及编程实例》这本书,为读者提供了全面深入 的MCGS串口通信知识和编程技巧。
精彩摘录
书中首先对MCGS串口通信的基本概念和特点进行了详细介绍,让读者对其有 一个清晰的认识。接着,通过丰富的实例,详细讲解了MCGS串口通信的编程方法 和实际应用。这些实例涵盖了串口通信的基本设置、数据发送与接收、串口调试 以及实际项目中的应用等,具有很强的书中还介绍了许多实际应用中的案例,包括如何通过串口 实现上位机和下位机之间的通信、如何对串口通信进行调试等。这些案例不仅能 够帮助读者更好地理解串口通信的应用场景,还能够为读者的实际项目开发提供 有力的帮助。
精彩摘录
书中还对MCGS串口通信的硬件接口和软件协议进行了详细介绍,为读者提供 了全面的技术资料。通过阅读这本书,读者不仅能够深入了解MCGS串口通信的知 识,还能够掌握相关的编程技巧和实际应用经验。
南大傲拓 NA200-PLC与组态王通讯讲解
5.8,9 寄存器对 LONG/FLOAT 类型的数据按间隔为 2 的形式编址,如 81,83,85... 6.Modbus 协议中定义 Modbus 消息(Modbus message)中的数据地址从 0 开始计算,即对于寄存器 1, 在进行串口通讯时将其数据地址计算为 0(参见 Modicon 公司的 Modbus Protocol Reference Guide)。驱 动程序遵照此规范进行了相应的处理,即当某个寄存器(0、1、3、4、8、9、FMC)的通道号定义为 1 的时 候,在串口通讯时其数据地址是 0。 7.驱动的变量后的寄存器通道号(寄存器范围),是按照以 1 为起始地址的,对于以 0 为起始地址的设 备,定义变量应该加 1。例如,如果某设备的一个变量在数据 4 区,为 40100,如果地址是从 1 开始,对应 变量定义为 40100,如果地址是从 0 开始,定义为 40101。 8.对于只写寄存器,请将采集频率设置为 0。
;
PLC 站号设置为 1 如下图。保存文件并下载到相应的 CPU 中,复位重新联机调试。
二、组态王设置 1、定义组态王设备
组态王定义设备时一般设备选择:[PLC] > [莫迪康] > [Modbus(RTU)] > [串行] 2、设备地址及通讯参数定义
选择设备 COM1 与 PLC 配置端一致。
,双击弹出以下窗口,设置相应参数波特率,校验,数据位,停止位要
2)、寄存器特殊说明: 1.SwapF 寄存器:在 MODBUS 规约驱动中,SwapF 寄存器用于改变 FLOAT 型数据的字节顺序,SwapL 寄
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PLC通过以太网模块和MCGS组态软件互联案例说明
案例以CPU201-2401挂载CMM201-0105模块,实现和MCGS组态软件通讯。
一、PLC软件编程设置
1.1、新建工程,挂载CMM201-0105以太网通讯模块。
1.2、硬件配置
在对话框里设置好以太网IP地址,网关,掩码,输入输出起始地址及大小。
目前以太网模块对于MODBUS TCP只限于从站模式。
读数据区表示:主站对从站可以读的区段的首地址(数据变量可以设置为只读);
输出数据大小表示:主站对从站可以读的区段的长度。
写数据区表示:主站对从站可以读写的区段的首地址(数据变量可以设置为读写or 只写);
输入数据大小表示:主站对从站可以读写区段的长度。
二、MCGS组态软件设置
2.1工程建立
1、鼠标单击文件菜单中“新建工程”选项。
2、选择文件菜单中的“工程另存为”菜单项,弹出文件保存窗口。
3、在文件名一栏内输入“Test11”,点击“保存”按钮,工程创建完毕。
2.2配置设备
1、鼠标单击主标题栏“设备窗口”,出现设备窗口。
2、双击“设备窗口”,添加设备驱动。
①点击“设备管理”,添加通用TCP/IP父设备
1、双击“通用TCP/IP父设备”,配置设备属性。
模块CMM201-0105配置的IP,远程端口502一样。
双击“设备0-莫迪康MODBUS_TCP”,出现设备属性对话框。
点击“设置设备内部属性”,出现莫迪康MODBUS_TCP通道属性设置,添加变量。
10001、10016输入型继电器(只读型),3WB0002、3WB0012输入型寄存器(只读型),00001、00016输出型继电器(读写),4WB0002、4WB0012输出型寄存器(读写)。
注意:此处配置的数据长度应≤PLC中通讯模块配置的数据长度。
3、通道连接
2.4、画面建立,变量连接
1、在“用户窗口”中单击“插入”按钮,建立“窗口0”。
2、选中“窗口0”,单击“窗口属性”,进入“用户窗口属性设置”。
3、在“用户窗口”中,选中“窗口0”,点击右键,选择下拉菜单中的“设置为启动窗口”选项,将该窗口设置为运行时自动加载的窗口。
4、双击“窗口0”,绘制画面。
三、连接硬件,PLC连机调试,MCGS在线模拟。
1、测试灯1即10001,灯16即10016
灯1,灯16被点亮,说明通讯正常。
2、测试MW22、MW32
PLC中MW22写入22,MW32中写入32,在MCGS中MW22显示值为22,MW32值显示为32,与PLC中写入值一致。
说明通讯正常。
3、测试00001,00016
置位00001,00016,,PLC程序中M21、M36,值为1,说明通讯正常。
4、测试MW2、MW12
在MCGS组态中MW2写入2,MW12写入12,在PLC中查看MW2值为2,MW12值为12,与写入的值一致,说明通讯正常。
通过以上例程可以看出PLC以太网模块中的数据与MCGS组态软件中的数据对应关系为:
MW2110001-10016;MW22-MW323WB0002-3WB0012
MW21O0001-00016;MW2-MW124WB0002-4WB0012
MW21的16位,从最低位开始,分别对应10001,10002,依次递增,直到10016(若此时,需要只读的位变量超过16位,只要从MW2的最低位开始读取即可,即MW2的最低位对应10017,依次增加。
)。
MW22对应3WB0002,MW32对应3WB00012。
MW1的16位,从最低位开始分别对应00001,00002,依次递增,直到00016(若此时,需要读写的位变量超过16位,只要从MW2的最低位开始读取即可,即MW2的最低位对应00017,依次增加)。
MW2对应4WB0002,MW12对应4WB0012。