数字式磁罗盘误差补偿及数据处理方法研究
磁罗盘动态性能校准研究
磁罗盘动态性能校准研究【摘要】介绍了数字磁罗盘动态性能测量原理、测试方法。
通过校准磁罗盘静态和动态状态下的方位角的示值,计算出磁罗盘的零偏和方位角均方根误差,研究在动态性能下方位角示值的变化,为磁罗盘在动态状态下应用提供校准数据,从而提高磁罗盘的方位角测量精度。
【关键词】数字磁罗盘;方位角;动态性能1.引言数字磁罗盘[1]被广泛应用于国防军工系统的各个行业,包括船舶、航空、航天、兵器等领域。
在太空中,磁罗盘可以用于卫星姿态的控制;在装甲车辆和水面舰艇上,磁罗盘作为GPS导航系统的补充,当GPS导航系统失效时用于导航;在导弹发射系统中,磁罗盘用于发射准备前方向角度的定位;在各类军用作战飞机上,磁罗盘用于各种飞行姿态的测量;在水下航行器上,磁罗盘用于水下导航及航行姿态的测量;在水雷、鱼雷上,磁罗盘用于定向攻击的导航手段之一;在港口防护、水下物理场测试中,磁罗盘用于水下方向定位,除国防军工系统外,磁罗盘在其他行业也有广泛应用,如在石油系统中,磁罗盘用于油井方向的测量;在越野车、各类民船中,磁罗盘被用于导航;在海洋环境检测中,磁罗盘用于水下方向定位。
生产厂家一般只提出了磁罗盘的静态技术指标,在实际使用中,磁罗盘的输出响应一般存在滞后现象,特别是在运动状态,磁罗盘的角度输出值有时不能很好的反映其当前状态,本文测量了磁罗盘静态性能[2]指标、动态性能[3]指标,并比较在静态和动态技术指标的不同,测量的数据为磁罗盘在实际应用中进行修正提供可靠的数据,提高磁罗盘的测量精度。
2.校准方法和校准原理动态性能校准是利用三轴无磁转台模拟磁罗盘的运动状态,以转台的实时角度为标准,在匀速转动和匀加速转动的状态下,对磁罗盘的方位角输出精度进行校准。
将被检磁罗盘安装在三轴无磁液压转台[4]的工作区安装面上,三轴无磁液压转台产生磁罗盘动态校准所需的运动状态;磁罗盘在运动过程中输出的方位角数据同步传输到控制系统中,与三轴无磁液压转台的运动数据进行同步数据处理,实现磁罗盘的静态性能校准、动态性能校准。
测量中的误差补偿与数据校正方法探讨

测量中的误差补偿与数据校正方法探讨随着科技的不断进步,测量技术也在不断的发展和实践中得到了应用和提升。
然而,在实际测量中,我们难免会遇到由于各种原因产生的误差和不准确性。
为了提高测量的精度和准确性,误差补偿与数据校正方法成为了必不可少的环节。
测量中的误差不仅来源于仪器本身的精度和稳定性,还包括环境因素、操作员技术水平等因素的影响。
因此,我们需要通过一系列的手段和方法来对这些误差进行补偿和校正。
首先,对于仪器的误差补偿,我们可以采用仪器校正的方法。
例如,利用标准样品进行校准,将仪器的读数与标准值进行比较,计算出仪器的误差值,并进行相应的调整和补偿。
其次,对于环境因素的影响,我们可以通过环境的控制和调整来减小误差。
例如,在温度变化较大的环境下进行测量时,可以通过恒温等措施来稳定环境温度,从而减小温度对测量结果的影响。
除了仪器校正和环境调控外,我们还可以利用数据处理和统计方法来进行误差补偿和数据校正。
例如,通过重复测量和数据平均的方法,可以减小由于偶然误差造成的不确定度。
同时,还可以利用拟合曲线的方法对测量数据进行处理,从而得到更加准确的测量结果。
此外,还有一些专门用于数据校正的方法,例如,最小二乘法、插值法等。
这些方法通过对测量数据进行分析和处理,利用数学模型来拟合和校正数据,从而消除误差和提高测量的准确性。
综上所述,测量中的误差补偿与数据校正方法是提高测量精度和准确性的关键。
通过仪器校正、环境控制、数据处理和统计等方法,我们可以减小误差和不确定度,得到更加准确的测量结果。
然而,在实际应用中,我们需要根据具体情况选择合适的方法,并在实践中不断优化和改进,以提高测量技术的水平和质量。
只有不断探索和创新,我们才能不断提高测量的准确性,为科学研究和工程实践提供可靠的数据支持。
高精度电子罗盘的误差修正技术研究
高精度电子罗盘的误差修正技术研究冯田佳点;孙乾;吕建廷【摘要】常规的数字罗盘受实际工作环境影响很大,输出精度较低,为了使其达到更高精度级别的精度和分辨率,本文全面分析了产生误差的原因,提出了相关的误差补偿算法、进行了仿真,并研制了相应的3轴数字罗盘硬件平台,结果表明可以很大程度上提高罗盘的输出精度和分辨率。
【期刊名称】《科技风》【年(卷),期】2012(000)016【总页数】2页(P8-9)【关键词】电子罗盘;MEMS磁传感器;MEMS加速度计;倾角测量;嵌入式系统【作者】冯田佳点;孙乾;吕建廷【作者单位】华东理工大学,上海市 200237;华东理工大学,上海市 200237;华东理工大学,上海市 200237【正文语种】中文电子罗盘依据地磁场的方向测量指向,同时通过磁传感器感应地球磁场实现测向定位。
地理的两极和地磁场的两极不重合,两者连线之间存在的磁偏角。
且地球磁场的磁力线在地球表面的分布的大小和方向是不同的。
比如在北美,磁力线与地球表面呈70度,这个角叫磁倾角。
在本文所用的三轴磁传感器中,其内部集成了3个惠斯通电桥,它们彼此互相垂直,分别对应直角坐标系中的x、y、z轴。
在通过这3个轴取得初始的磁数据后经过桥偏置补偿、硬铁补偿后,所得数据即可用于3D方程的求解,进而计算航向。
本文所用的三轴磁传感器中对应直角坐标系中的x轴和y轴决定了水平面,z轴垂直于水平面,此处的地磁场Hearth在水平面上的分量Hnorth所指即磁北的方向。
而x轴所指的即当前的方位的正前方,所以我们只需要测出x轴和Hnorth之间的夹角即可以知道当前的方位角α。
上述即为水平状态时电子罗盘的测角原理。
由式1可知我们所测得的方位角只是当前位置和地磁北极之间的夹角。
由于地磁北极和地理北极之间存在磁偏角,故应根据磁偏角相应的加上或减去当前所在方位的磁偏角,得到的才是当前位置真正的方位角。
而地球不同位置的磁偏角不同,应利用GPS接收器来确定当前的位置,从而校正地理位置带来的方位角测量误差。
数字罗盘的设计与误差补偿方法的研究-wyx_20140212
安徽建筑工业学院毕业设计 (论文)专业通信工程班级 10通信(1)班学生姓名王宇轩学号 10205040238 课题数字罗盘的设计与误差补偿方法的研究——系统总体设计指导教师金勇2014年6月课题名称数字罗盘的设计与误差补偿方法的研究——系统总体设计院系:电子与信息工程学院系别:通信工程姓名:王宇轩学号:10205040238班级:10通信(1)班导师:金勇摘要本文在了解地磁导航的原理、磁罗盘用途的基础上,针对国内外数字罗盘研究开发的现状,采用各向异性磁阻传感器(AMR)、双轴加速度计(MEMS)、结合单片机芯片,研制了一种低成本、高精度基于磁阻技术的具有倾斜补偿功能三维数字罗盘。
本文分析了磁阻效应、磁阻传感器及加速度计的工作原理及输出信号特征,重点介绍了整个系统的工作原理及组成,确定了各项系统指标和主要器件的选型,完成了三维数字罗盘系统的总体设计,论述了系统的硬件电路设计及软件的总体设计思想。
利用该方案设计的三维数字罗盘测量系统,硬件上具有体积小、重量轻、功耗和成本低等特点;软件设计采用模块化设计方法,可修改性强,能根据需要方便地进行修改。
关键词:磁阻传感器双轴加速度计C8051F320 总体设计AbstractBased on understanding of the principle of magnetic navigation and the use of magnetic compass, Knowing the digital compass’s research and development of domestic and foreign, Using anisotropic magnetoresistive sensor (AMR), dual-axis accelerometer (MEMS), combined with single chip, Based on magnetoresistive technology developed a low cost with high accuracy’s three-dimensional digital compass. The paper analyzes the magnetoresistance, magnetoresistive sensor and the accelerometer output signal characteristics of the working principle, Introduce the focus of the whole system works and composition, identified the main components of the system indicators and the selection, complete the three-dimensional digital compass system design are discussed hardware circuit design and software design ideas. This digital compass measurement system, the hardware is small, light weight, power consumption and low cost; software design use the modular design method can be modified and strong, can easily be modified as needed.Keywords:Magnetoresistive sensor Dual-axis accelerometer C8051F320 Overall design目录摘要 .................................................................................................................................. I I 1 引言 . (1)1.1课题背景及意义 (1)1.2研究内容 (1)1.3论文结构 (2)2 数字罗盘的工作原理 (3)2.1数字罗盘测量原理 (3)2.1.1 磁阻效应及磁阻传感器 (3)2.1.2 角度测量与方向计算 (4)2.2系统构成 (5)2.3数字罗盘模块 (5)2.3.1 磁阻传感器 (5)2.3.2 加速度计 (6)2.3.3 运算放大器 (6)2.3.4 微控制器 (7)2.4外围模块 (8)2.4.1 电源模块 (8)2.4.2 各种接口 (8)(1)USB接口 (8)(2)JTAG接口 (8)2.5本章小结 (9)3 系统总体设计 (10)3.1系统方案与设计指标 (10)3.2主要器件选型 (11)3.2.1 主控芯片 (11)3.2.2磁阻传感器 (13)3.2.3 加速度计 (15)3.2.4 放大器 (17)3.2.5 液晶显示模块 (18)3.3本章小结 (19)4 系统硬件设计 (20)4.1罗盘航向测量电路设计 (20)4.1.1核心控制电路的设计 (20)4.1.2数字罗盘电路设计 (20)(1)磁阻传感器电路 (21)(2)加速度计电路 (21)(3)置复位电路 (21)(4)信号放大电路 (22)4.2调试板接口电路设计 (22)4.2.1电源电路及基准电压电路设计 (22)(1)电源电路 (22)(2)基准电压电路 (23)4.2.2调试板接口电路设计 (23)(1)LCD液晶显示接口电路 (23)(2)串口通信电路 (24)4.3本章小结 (25)5 系统软件设计 (26)5.1系统软件设计概述 (26)5.2软件总体流程 (26)5.4本章小结 (27)结论 (28)致谢 (29)参考文献 (30)附录1 系统原理图 (32)附录2 系统PCB图 (33)附录3 主程序 (35)附录4 实物图 (39)1 引言1.1 课题背景及意义地磁导航是一种重要的导航方式,广泛应用于航海、海上平台控制、GPS集成死区推估等方面。
磁罗盘的精度与误差分析

磁罗盘的精度与误差分析磁罗盘是一种常用的导航仪器,用于确定方位和导航。
它通过测量地球磁场的方向来确定北方向,并结合其他导航工具如地图和望远镜来提供准确的方向信息。
然而,磁罗盘的测量结果并不是绝对准确的,因为它们可能受到各种误差的影响。
首先,磁罗盘的精度与其制造质量和设计有关。
制造商应确保磁罗盘具有良好的机械结构和高质量的磁性材料。
制造过程中的不良材料或生产错误可能导致指示不准确的结果。
因此,选择一个知名的制造商并购买质量可靠的磁罗盘是很重要的。
此外,环境条件也会对磁罗盘的精度产生影响。
磁罗盘应该在无风的条件下使用,并要远离电子设备、大型金属物体和其他可能干扰地球磁场的物体。
这些干扰源可能会引起磁罗盘的指示偏离,并导致不准确的方向测量。
因此,在使用磁罗盘之前,应该仔细考虑周围环境,并尽量消除潜在的干扰。
另一个影响磁罗盘准确度的因素是外部磁场的干扰。
地球上的磁场并不是均匀的,而且可能会受到其他物体或地理特征的影响。
例如,附近有大型岩石或金属物体可能会扭曲附近的磁场,从而影响磁罗盘的指示。
在这种情况下,使用磁罗盘的精度就会受到限制。
为了减小这种误差,使用磁罗盘时应避免靠近这些干扰源,并了解附近地理特征的可能影响。
除了外部干扰,磁罗盘本身也可能存在一些内部误差。
例如,磁罗盘的刻度盘或指针可能存在误差,导致测量结果的偏离。
为了减小这些误差,磁罗盘制造商通常会在生产过程中进行校准,以确保其准确性。
此外,使用磁罗盘时,使用者应确保仔细读取并准确解读刻度盘上的指示。
最后,使用者自身的技能和经验也会对磁罗盘的准确性产生影响。
正确的使用技巧和解读能力是确保测量结果准确的关键。
使用者应该接受相关的培训和指导,以熟练掌握使用磁罗盘的方法和技巧。
此外,在实际使用中,使用者还应注意消除人为误差,如身体姿势和手持稳定等方面的因素。
总体而言,磁罗盘的精度主要取决于其制造质量和设计、环境条件、外部磁场干扰、内部误差以及使用者的技能和经验。
数字电子罗盘误差分析及校正技术研究

平均误差 7’ #/. ( 均方根) ! 注: 表中方位测量单位为度, 目标真值使用方向机测量, 测量 精度优于 $ 189, 车头指向与初始校正方向一 致时, 误差较小; 如果车头指向与初始方向不一致时, 误差将增大, 特别是相差 "/-. 时, 误差最大可达 "4. , 测量结果基本不能使用。 传统的校正技术是假定:
如果车头指向与初始方向不一致时误差将增大特别是相差180误差最大可达16则载体在原地旋转一周后测量数据在水平面的投影分量服从正圆分布经过多次试验验证当车载平台在某一指向校正如果车载平台的指向与校正方向差值小于30则平台指向变化对测量精度的影响较小因此在实际使用时可使用罗盘测量出载体平台的概略指向作为计算补偿量时的输入值数据处理流程使用式对电子罗盘输出值进行补偿的步骤和流程如下使用侦察设备的电子罗盘测量装载平台指向的概略方位为软铁磁场在xy轴上的投影分量但实际情况并非如此尤其是在本例中罗盘与平台之间存在相对运动导致软铁和硬铁的磁场强度的大小和方向不能够维持恒定加之实际应用时车载平台的指向是随机的导致了标定环境的磁场分布和使用环境的磁场分布不一致使标定失效测量精度变得非常差考虑装载平台指向补偿因素的校正方法假定未受干扰的地磁场在则目标方位角的真值应为瞄准目标记录电子罗盘输出值标定时需要注意以下几点用于标定的目标数量应不少于18并均匀分布在以观察中心为圆心的周边每隔30或更小测一组数据2台侦察设备分别安装在车载平台上然后应用本文给出的校正补偿方法对设备的补偿系数进行rctan为了得到目标方位角的真值必须从罗盘的输rctanrctan
盘生产商建议尽量移去罗盘附近的软铁物质, 然后对 硬铁物质进行校正。 ! ’ !# 特殊应用模式下的校正技术 #’ #’ "! 应用背景 电子罗盘置于某侦察设备中, 侦察设备的装载平 台为轻型越野车, 侦察设备能相对于车载平台进行方 位巡航和俯仰运动。通过测量侦察设备与目标之间的 距离以及观察光轴与目标之间的方位与俯仰角, 解算 出目标的地理坐标。为保证解算精度, 罗盘的定向精 ( 均方根) 。 度应优于 ". #’ #’ #! 运用简单校正方法的误差校正技术 一般情况下, 当罗盘使用于车载平台中时, 可采用
无航向基准时数字磁罗盘的自差校正
:
上 式中:系数 H 、 口 、口 、口
连续的均匀的变化姿态多圈 ,并在倾斜方 向进 行 硬铁磁 力校正 , 校 正程序一般 由厂 家提供 。
b 、D 为 自差系数 。其 中 a x x
、
a
、
本 文从数 字磁 罗盘 的测 量 原理 出发 ,针 地 球上某处地 磁场的方向 ,可认为它在某一范 对数字 罗盘模块 H MR 3 3 0 0 和计算 机组成 的数 围是均匀的。软铁是被地磁场磁化后获得磁性 字磁罗盘系统 ,分析在软铁磁力 、硬铁磁力 两 的,它本身是任何没有磁性的 ,而且软铁的磁
测量精 度 已 经达到了非常高 水平, 通常为 l 。 , 甚至到达 0 . 5 。
水平 。但实 际应用 中,数字磁罗盘受到环境的 【 关键词 】磁 罗盘 自 差 自差补偿 图1 :磁方 向角的定 义
一
影响 ,造成 了自差从而存在着测量偏差 。运用 个 简单 的实验 ,就可 以看 出数字磁罗盘的 自
在理想 情况下 , H MR 3 3 0 0型数字 罗盘仅
出 H ,H 的变化上 假设出现 自差时 ,
。
行 的研 究 ,采取多位置软硬磁力系数标定的方 受到地磁场的作用而指磁北 。但事实上数字磁 法 。许 多数字磁罗盘 用户手册描述的硬铁校正 罗盘系统在船舶上是不可能不受到船舶 的磁场
的运 动或则是在 某些既定的点上进行测量。在
数据对 。传统的机械式磁罗盘 ,采用爱利法 ,
文献 【 1 】 是对 安装在船舶上 的机械式磁 罗盘 进 们假 定地 磁场 的水平 分量为 H n 个0 。 、9 0 。 、1 8 0 。 、2 7 0 。 四个 航 向, ,那么 可 以 即是取 4 行 了软、硬铁环境下进行磁罗盘 自差分析 。在 求得磁传感器 S 和 S 测出的磁场分量为: 直接进行观测 自 差后 ,运用校正磁棒进行抵 消 自 差 ,这个方法有着一个缺 陷就是需 要一个独
机器人导航中数字罗盘HMR3000的数据处理方法
式中, 系统状态转移矩阵: 1 * #& 5 1 + & 4 ’ 1
[ ]
(3)
,& 是协方差为 - 的系统噪声矩阵, ! & 是系 统噪声矩阵 的驱动矩阵, 本系统 中为 .。系统 的 量测方程为: / & 4 0& )& 5 1& (8) 式中 0& 为系统量测矩阵, 本系统中为 . 。 1& 是协 方差为 $ 的量测噪声矩阵。则通过下面的公式, 就可以估计出机器人的航向值: 2 & 5 1 + & 4 # & 5 1+ & ) 2 & +& ) 3 & 5 1 + & 4 # & 5 1+ & 3 & + & #
*+,$"""
的 数 据 处 理 方 法
邓鲁华- 宗光华- 王- 巍
( 北京航空航天大学 机械工程及自动化学院,北京 - !"""%$)
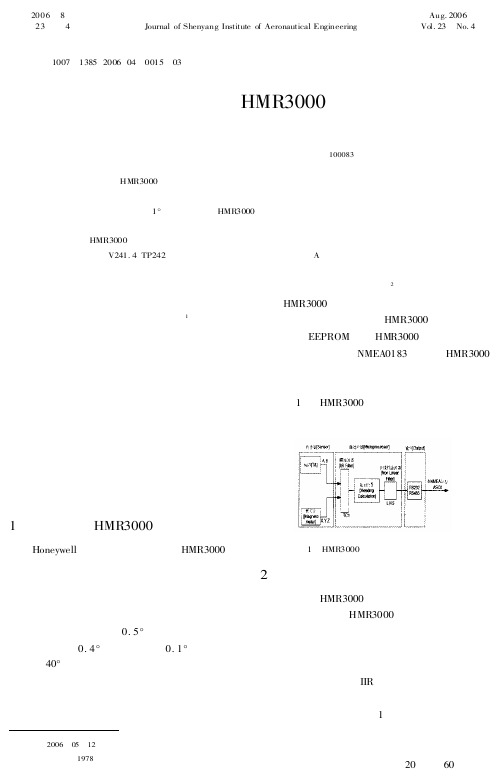
摘- 要: 介绍了 *+,$""" 型数字罗盘的主要性能, 根据罗盘在移动机器人导航 中的应用, 对航向 和俯 仰、 横滚输出数据设计了不同的卡尔 曼滤波 器, 有效地消 除了罗 盘输出 数据的 波动, 使机器 人姿 态测量精度稳定在 !. 左 右, 证 明了 *+,$""" 型数 字罗 盘在 机器人 导航 领域应 用的 良好效 果。 关 键词: *+,$""" 数字罗盘; 机 器人; 导航;卡尔曼滤波 中图 分类号: /’)!0 ) ; 12’)’ 文献标识码: 3
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数字式磁罗盘误差补偿及数据处理方法研究
数字式磁罗盘误差补偿及数据处理方法研究
引言:
数字式磁罗盘是现代导航领域重要的一种定位工具,它广泛应用
于航空、航海、测绘、军事等领域。
但是,由于存在多种误差因素的
影响,数字式磁罗盘的精度和精度稳定性成为制约其使用的主要因素。
为了提高数字式磁罗盘的测量精度和稳定性,需要对其误差进行补偿。
误差来源及分类:
数字式磁罗盘的误差来源主要包括:磁场干扰、传感器本身误差、磁罗盘外力干扰等。
其中,外力干扰包括机体振动、温度变化、气压
变化等因素。
因此,对于数字式磁罗盘的误差修正需要对这些方面进
行考虑,以提高其精度。
误差补偿方法:
根据数字式磁罗盘误差来源的不同,可以采取不同的误差补偿方法。
其中,传感器本身误差补偿需要对其进行定标修正;磁场干扰补
偿则需要进行地磁校正,以抵消地球磁场对数字式磁罗盘的影响;外
力干扰补偿则需要通过机体振动控制、温度控制、气压控制等手段进行。
数据处理方法:
为了更好的运用数字式磁罗盘,对其数据进行处理也是至关重要的。
通过数据处理,可以获取到数字式磁罗盘的各种数据信息,如方
位角、磁力值等。
具体的数据处理方法包括滤波、降噪、转换等。
其中,数字滤波是一种比较常用的处理方法,可以有效的去掉信号中的
噪声成分。
同时,通过对数据进行转换,如坐标转换、字节流转换等,可以更好地与其他设备进行交互。
结论:
数字式磁罗盘的误差补偿及数据处理是提高数字式磁罗盘精度稳
定性的重要手段。
有效的误差补偿和数据处理方法可以提高数字式磁罗盘的测量精度和精度稳定性,具有重要意义。